3000W機器人雙工位翻轉平臺激光焊接機這款設備是現代高端智能制造的典型代表,它集成了大功率激光器、工業機器人、自動化雙工位翻轉平臺及先進控制系統,實現了高效率、高精度、高質量的自動化激光焊接。一
2025-11-24 13:56:24
復合機器人對比傳統AGV和機械臂的優勢,核心在于它突破了單一設備的功能局限,實現了“移動+操作”的深度協同,尤其在上下料和物料轉運場景中優勢顯著。經世智能復合機器人:重新定義上下料與物料轉運的效率
2025-11-21 15:32:56 1303
1303 
算法與 C++ 實時模塊開發;
- 可作為控制核心部署在高精度測量機器人、激光切割機械臂、協作機械臂、AGV導航車等系統中;
- 具備機器人動態補償算法與誤差校正方案運行環境,為“高精度機器人控制
2025-11-14 15:48:29
微納機器人是工作在微米至納米尺度的“智能微型機器”,在精準醫療、環境修復等領域應用前景廣闊。然而,當前微納機器人多采用單一材料體系,功能擴展受限,復雜環境下的多刺激協同控制與多步操作成為科研挑戰。為此,科研團隊提出新思路,采用多材料多模塊加工微納機器人,并設計出仿手型的3D結構。
2025-11-13 14:49:33236 科義軌道式巡檢機器人:高精度智能巡檢解決方案精準定位系統:毫米級路徑控制技術科義軌道式巡檢機器人搭載激光導航系統,實現±5毫米級定位精度,支持多機協同作業,形成無死角巡檢網絡。
2025-11-06 09:44:02
。· 多路MIPI-CSI接口:原生支持接入多個攝像頭,為構建多目視覺系統打下堅實基礎,滿足機器人全方位感知需求。
RK3576在機器人領域的核心應用場景特種作業與工程機器人· 應用領域:工程機械
2025-10-29 16:41:20
經過我的申請,
馬老師發放了,
小蘿卜機器人的,
開發權限,
原來的小蘿卜公司,
因為經營不善倒閉,
作為科研產品,
幾個技術對此惋惜,
自掏腰包,
要讓小蘿卜機器人,
再生,
每次聽到小蘿卜說
2025-10-23 05:24:26
為原理驗證機且為了提高項目整體的開發速度,機器人的所有元器件均采用TB上的現有模塊,并使用洞洞板直接焊接的方式來構建其機械結構和電氣連接。
在軟件層面上,該機器人內部集成有經典的PID閉環控制算法,可根據
2025-10-20 10:39:51
核心技術,突破場景局限 科義履帶式巡檢機器人以 雙導航系統為核心,搭配綜合懸掛系統,輕松跨越復雜地形,實現靈活移動與≤30° 爬坡能力,7×24 小時全天候運行無憂。雙光云臺集成可見光
2025-10-16 10:29:44
Arduino Uno l兩輪自平衡機器人 電機驅動無輸出求解
2025-10-15 06:36:24
正運動柔性機械手供料解決方案
2025-10-09 14:58:29374 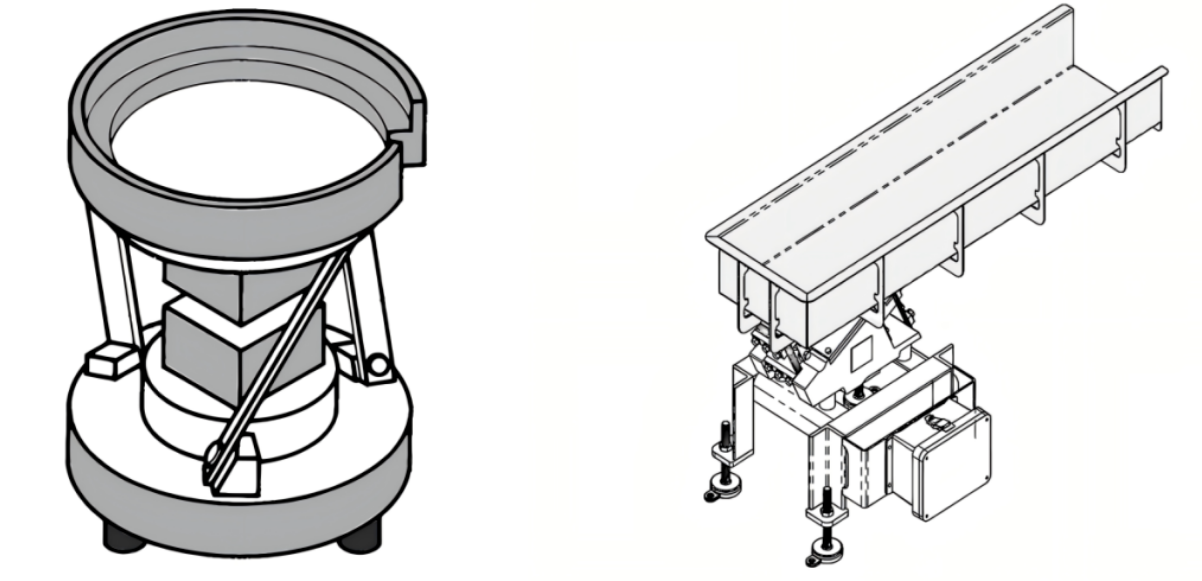
中圖儀器GTS運動機器人位置激光跟蹤儀集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,是高精度、便攜式的空間大尺寸坐標測量機,是同時具高精度(μm級)、大工
2025-09-09 15:05:00
當掃地機器人裝上能夾取 400 克重物、在 30 厘米空間內精細作業的 “機械手”,一場智能家居領域的 “具身智能” 革命已然開啟。2025 年 AWE 與 CES 展上,追覓 4 關節仿生機械手
2025-09-08 17:13:44798 
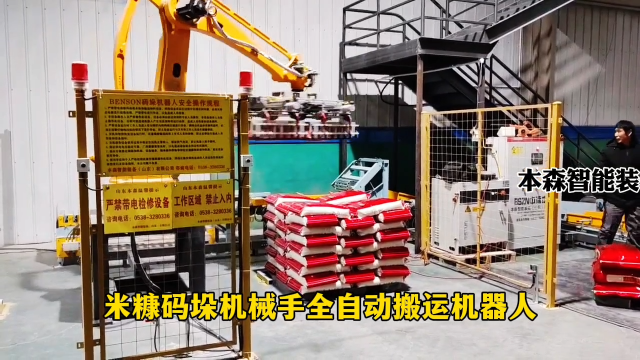
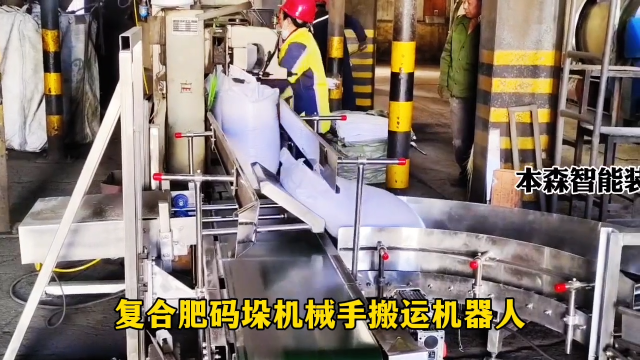
高工機器人產業研究所(GGII)數據顯示,2024年中國工業機器人應用市場中,用于搬運碼垛、焊接、噴涂、裝配及拋光打磨等操作的機器人占比將近95%左右,其中搬運碼垛、上下料機器人的占比最高,占據一半以上的份額。
2025-08-26 14:14:311657 醫院HDU高依賴康復病房病人/養老場景易發病老人江智病癥監護機器人JZR15605201應用場景:專對醫院HDU高依賴康復病房病人病癥監護專對養老場景易發病老人病癥監護2 機器人
2025-08-18 16:19:17
,詳細闡述了MR30 分布式 IO 解決方案,最后總結了該方案的應用成效。? 生產工藝介紹? 噴繪機器人的工作流程主要包括加載噴涂程序、工件安裝、噴涂、監控與調整、噴涂完成于清理等環節。? 【開機與初始化】 打開電源,啟動機器人控
2025-08-15 13:48:34610 
產品簡介經世智能3C電子行業物料轉運復合機器人,復合機器人在3C電子行業聚焦物料轉運與倉儲管理、精密設備上下料、裝配站機臺上下料等應用場景。機器人機械臂末端可定制末端夾具,車身可定制物料緩存架
2025-08-13 13:53:28
產品簡介經世智能檔案存取復合機器人,在智慧檔案庫房行業主要應用于檔案自動存取與轉運、涉密檔案管理等環節,通過“AGV移動底盤+協作機械臂+視覺系統”一體化控制方案實現高效自動化作業。機器人機械臂末端
2025-08-13 13:36:24
產品簡介經世智能半導體行業晶圓盒轉運復合機器人,復合機器人在半導體行業主要應用于晶圓盒轉運、機臺上下料等環節,通過“AGV移動底盤+協作機械臂+視覺系統"一體化控制方案實現高效自動化作業。機器人機械
2025-08-13 13:28:39
產品簡介經世智能實驗室物料轉運復合機器人,復合機器人在智慧實驗室行業主要應用于實驗樣本自動化轉運、高通量實驗流程銜接、危險物料與廢棄物處理等環節,通過“AGV移動底盤+協作機械臂+視覺系統”一體化
2025-08-13 10:06:22
產品簡介經世智能CNC上下料復合機器人,復合機器人集成AGV+機械臂+視覺系統,提供CNC多工序柔性上下料、CNC全自動刀具更換自動化解決方案,打通生產物流最后“一公里"。機器人機械臂末端可定制末端
2025-08-13 09:47:30
的施工品質,豐坦噴涂機器人P320Max摘得實戰比賽“效能之星”獎。本次大賽旨在通過政府、聯盟、企業多方深度聯動,打通“政產學研用”關鍵環節,推動建筑機器人全鏈條產業
2025-08-01 11:00:32681 
工業焊接機器人醫療機器人人型機器人這些搬運機器人、焊接機器人、噴涂機器人、加工機器人等靈活作業的背后離不開工業機器人線束穩定的信號傳輸與電力連接;工業機器人常見線束有
2025-08-01 08:03:411345 
在工業噴涂領域面臨高精度與柔性化雙重挑戰的今天,傳統方式受限于編程效率與復雜曲面適應性,而資深技師的寶貴經驗亟待數字化傳承。海默機器人依托技術積累,推出移動式慣導隨動噴涂協作機器人,以“雙核動態捕捉
2025-07-29 18:38:10623 
的基礎,也是三者的實現終端,智能制造裝備產業包括高檔數控機床、工業機器人、自動化成套生產線、精密儀器儀表、智能傳感器、汽車自動化焊接線、柔性自動化生產線、智能農機、3D 打印機等領域。而智能制造裝備中工業
2025-07-26 11:22:07
該設備應用在公共充電場, 汽車產線, 測試設備等需要使用機器人自動取出充電槍, 插入充電車輛, 取出充電槍放回充電樁, 全程自動化,不需要人工干預. 可以對應多種充電槍型號. 在重點充電場企業和車企
2025-07-07 08:47:04
正運動DELTA機械手多物料視覺分揀解決方案
2025-06-24 11:16:47691 
【摘 要】以嵌入式運動控制體系為基礎,以移動機器人為研究對象,結合三輪結構輪式移動機器人,對二輪差速驅動轉向自主移動機器人運動學和動力學空間模型進行了分析和計算,研究和設計了自主移動機器人電機驅動
2025-06-11 14:30:14
某汽車制造企業新建智能噴涂生產線,需將原有基于ModbusTCP協議的噴涂設備(如機器人)接入現有的Ethernet IP控制系統(Rockwell5000PLC)。
2025-06-07 16:45:19513 
大象機器人成立于2016年,專注協作機器人研發與應用,產品線涵蓋輕量級協作機器人、人形機器人、仿生機器人等多種形態。拳頭產品myCobot系列以“全球最輕的六軸機械臂”聞名,累計銷量超數萬臺,覆蓋
2025-06-06 16:55:321207 
源的開發資料為開發者提供了深入研究和定制語音機器人功能的基礎,開發者可以根據不同的應用需求,對語音識別算法、語音合成引擎等進行優化和改進。一對一的技術支持則能及時解決開發過程中遇到的難題,保障語音機器人項目的順利推進。2351開發板白底圖.png
2025-05-28 11:36:54
正運動運動控制模塊結合第三方視覺實現Delta機械手柔性上下料應用開發
2025-05-23 10:29:42578 
汽車制造、3C精密加工、航空航天等領域的優選方案。本文將系統解析Kasite機器人主軸的選型推薦策略。德國進口Kasite高速電主軸將主軸與機械手臂完美結合,為汽
2025-05-15 14:50:19673 
納芯微電子工業控制、機器人解決方案器件選型概述
2025-05-15 14:40:32772 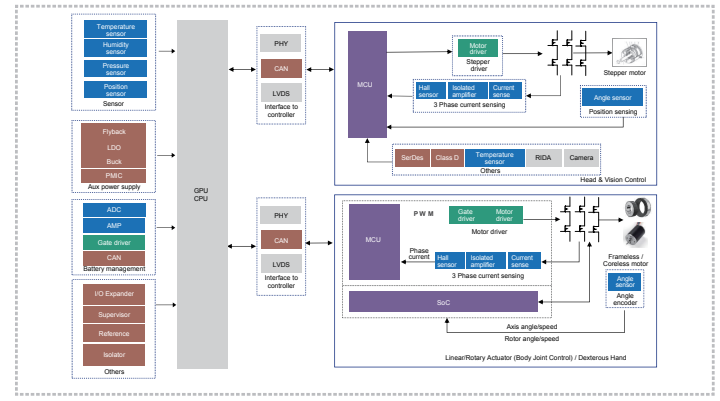
圖,電子技術資料網站具身智能機器人****開發平臺——Fibot廣和通發布機器人開發平臺-電子發燒友網NVIDIA Isaac 英偉達綜合性機器人開發平臺NVIDIA Isaac 是英偉達推出的綜合性機器人開發平臺-電子發燒友網
2025-05-13 15:02:04
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速開發
2025-04-30 01:05:09
應用案例:書中提供了多個機器人應用案例,幫助讀者將所學的 ROS 2 知識應用到實際的機器人項目中。例如,在自主移動機器人案例中,詳細講解了如何實現機器人的自主導航、避障、任務執行等功能,包括硬件選型
2025-04-27 11:24:32
大象機器人成立于2016年,專注協作機器人研發與應用,產品線涵蓋輕量級協作機器人、人形機器人、仿生機器人等多種形態。拳頭產品myCobot系列以“全球最輕的六軸機械臂”聞名,累計銷量超數萬臺,覆蓋
2025-04-25 17:59:18
電子發燒友網站提供《KUKA機器人使用說明書.pdf》資料免費下載
2025-04-17 14:07:11 1
1 在機器人技術、人工智能技術飛速發展的今天,全球機器人產業正在加速重構,據智庫數據顯示,2025年中國教育機器人市場規模將突破800億元,其中高校實驗室設備采購占比超40%。中國教育機器人生態正從“技術跟隨”邁向“自主定義”的關鍵轉折。
2025-04-16 15:21:361493 
GTS機器人位置精度激光跟蹤測量儀是高精度、便攜式的空間大尺寸坐標測量機。它集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,主要用于百米大尺度空間三維坐標
2025-04-14 11:00:17
邁來芯機器人芯片解決方案詳細分析 一、 核心技術布局 ? 邁來芯(Melexis)憑借其在汽車電子領域積累的可靠性經驗,將高精度傳感、高效驅動和邊緣智能技術遷移至機器人領域,形成了覆蓋感知、驅動
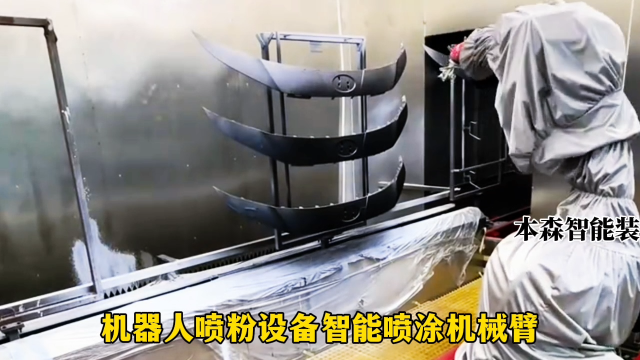
2025-04-12 11:28:152102 工業噴涂機器人作為自動化生產的關鍵設備,在提升效率、保障質量方面發揮了重要作用。隨著工業智能化轉型加快,工業噴涂應用也亟需智能化升級。
2025-04-10 14:48:02889 機器人激光焊接機:高精度自動化焊接的未來1. 概述機器人激光焊接機是一種集成了工業機器人和激光焊接技術的先進自動化設備,通過高能量密度的激光束實現快速、精準的焊接。該系統結合了機器人的靈活運動
2025-03-28 14:04:12
GTS機器人位姿精度激光跟蹤校準儀與空間姿態探頭配合,能夠根據合作目標的精確空間姿態對被測工件的內部特征、隱藏特征或曲面等復雜特征進行快速、高精度的測量。廣泛應用在飛機、汽車、船舶、航天、機器人
2025-03-25 18:10:11
關節機器人領域迎來一位實力選手。繼布局移動機器人、機器視覺業務后,海康機器人正在拓展新的產品線。
2025-03-20 10:47:481304 此集成方案顯著提升了生產效率,產線節拍提高25%,不良率降低超過40%。該解決方案已成為日本汽車零部件制造行業的標桿案例,展示了不同工業通信協議融合的成功實踐。機械手控制系統采用歐姆龍運動控制器作為
2025-03-18 14:11:01473 
電子發燒友網站提供《KUKA機器人編程說明(英文).pdf》資料免費下載
2025-03-07 14:05:010 資格!
從 PC 到智能手機,下一個更大的計算平臺是什么?
最佳答案可能是 機器人 !
如果設想成真,則需要有人為機器人“造腦”,即打造適配的計算平臺及操作系統。
就像以計算機為平臺的計算機時代,和以
2025-03-03 14:18:22
步驟,完整復現這款低成本、高性能的六足機器人。開發過程中建議使用支架輔助調試,避免足部意外觸地。如需進一步優化步態或擴展功能,可基于提供的Arduino代碼進行二次開發。
其他代碼資料:*附件:機器人
2025-03-03 11:25:07
結構設計,更輕、更小、更緊湊? 快速組裝人形機器人手臂,大幅縮短開發周期 人形機器人手臂輕量化人形機器人關節人形機器人關節參數
2025-02-21 15:04:19
HJR系列帶力控旋轉關節模組? 專為人形機器人應用研發,提供定制化服務? 集諧波減速器、電機、抱閘、編碼器、驅動器、扭矩傳感器于一體? 創新的諧波減速器結構,讓關節模組整體輕量化程度進一步提升
2025-02-21 14:59:52
HJL系列行星滾柱絲杠線性關節模組? 專為人形機器人應用研發,提供定制化服務? 集行星滾柱絲杠、電機、編碼器、拉壓力傳感器于一體? 強大推力,性能強勁,穩定可靠? 精巧結構設計,整體輕量化程度進一步
2025-02-21 14:55:54
設計之中,重新定義了下一代家用掃地機器人的標準。 石頭G30 Space探索版搭載了全球首創的仿生機械手設計,這一突破性技術賦予了機器超高的機動性和靈活性,使其能夠輕松應對各種復雜家居環境。機械臂的成熟度極高,不僅在功能上實現了可用,更在用
2025-02-18 09:15:171206 本文轉載自:深圳特區報當冰雪盛事遇上人工智能科技新星,將擦出怎樣的火花?2月3日,在-20℃的亞冬會火炬傳遞現場,總部位于深圳龍華的企業樂聚生產的“夸父”人形機器人驚艷亮相,與火炬手進行揮手、擊掌
2025-02-08 15:39:231198 
ABB工業機器人廣泛應用于各種工業領域,能夠替代人工執行高強度的生產工作,如碼垛、焊接、沖壓、噴涂、裝配、分揀等,能夠有效提高工作效率與質量安全。比如碼垛工作,傳統工廠需要人工搬運到托盤上,勞動強度
2025-01-23 17:19:111097 
并減少人力成本。 隨著物聯網與信息化技術的發展,越來越多自動化設備得以實現遠程監控與在線管理,從而發揮更大管理效益,確保生產秩序的安全可控。對此,數之能提供ABB機械手臂(機器人)數據采集物聯網平臺,實現ABB機器人數
2025-01-23 15:46:43865 
? ? ? 在選擇搬運機械手的電機時,需要考慮多個因素以確保電機的性能滿足機械手的運行需求。以下是一個詳細的案例分析,說明如何為搬運機械手選擇合適的電機。 ? ? ? ? 一、電機類型選擇
2025-01-21 16:44:451590 
通過LabVIEW進行SCARA機械手的開發應用
2025-01-09 11:42:232044 
 電子發燒友App
電子發燒友App







































 工商網監
工商網監
評論