") 柔性機械手視覺供料解決方案,提升無序分揀效率!
柔性機械手視覺供料解決方案,提升無序分揀效率!

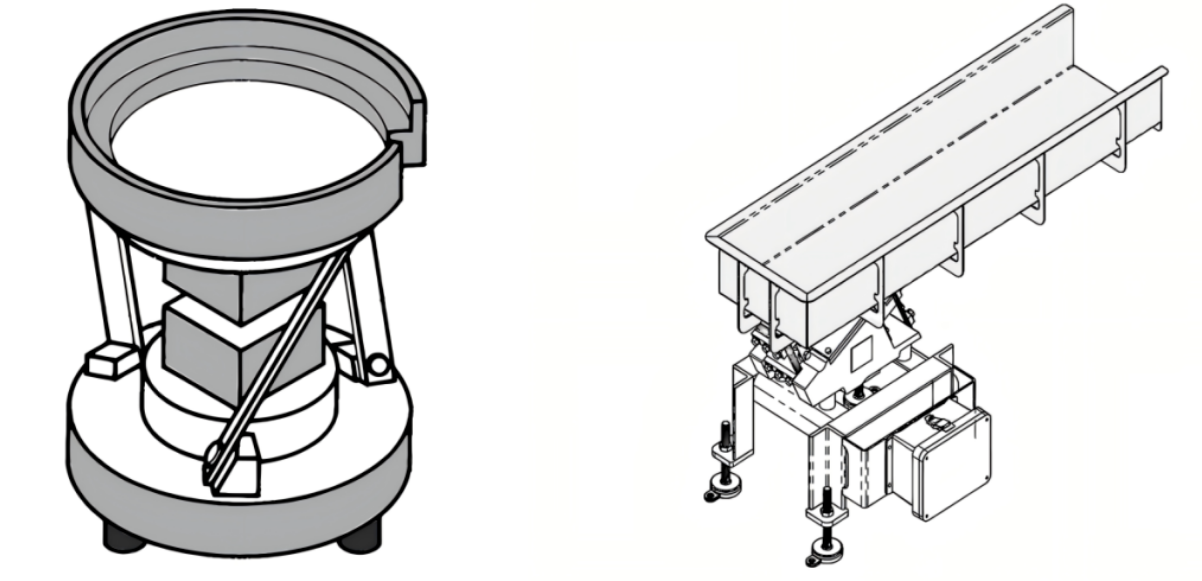 傳統(tǒng)振動供料系統(tǒng)結(jié)構
傳統(tǒng)振動供料系統(tǒng)結(jié)構
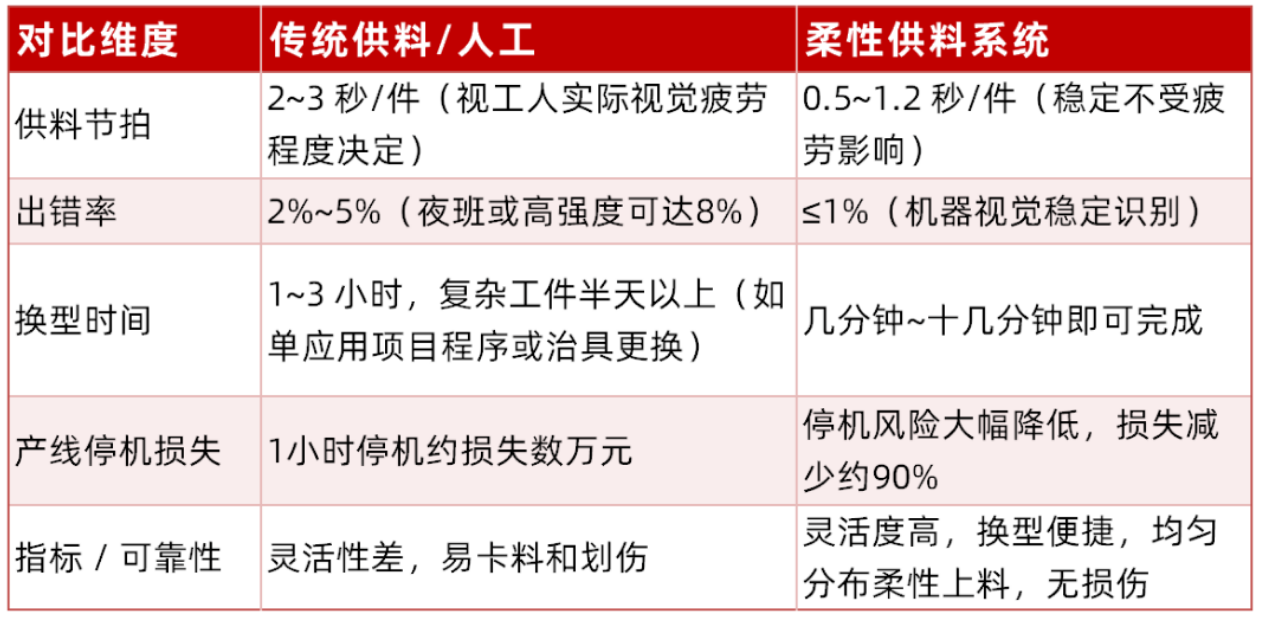
這些問題正在導致工廠面臨巨大的生產(chǎn)損失!
在實際生產(chǎn)中,傳統(tǒng)供料方式在應對零件無序堆疊和多品種、復雜形態(tài)零件時,常常面臨效率低、換型慢、成本高、周期長、柔性差、依賴人工等問題。通過客戶現(xiàn)場的對比數(shù)據(jù)顯示:
柔性供料市場導讀
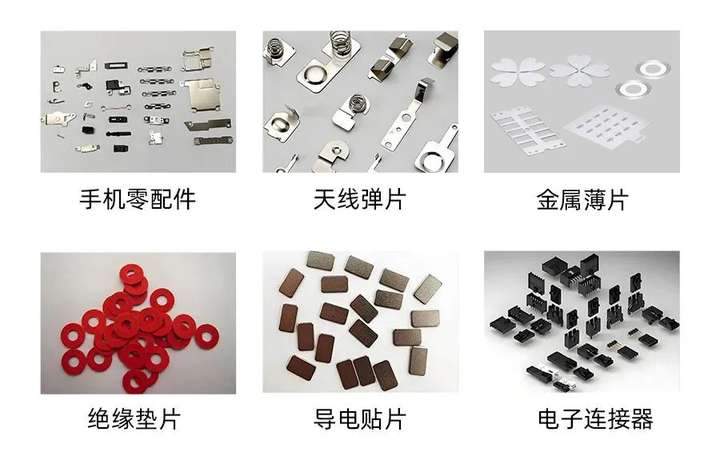
柔性供料站融合機器視覺、柔性振動盤與機械手等技術,構建柔性自動供料系統(tǒng),可替代傳統(tǒng)供料方式,能夠滿足小批量共用、多品種快速切換需求,從容應對高混料生產(chǎn)模式的持續(xù)挑戰(zhàn),并適用于對表面防損傷、防變形的精密零部件,實現(xiàn)均勻分布與柔性上料的需求。
▌柔性供料客戶核心訴求
隨著3C消費電子、電子半導體、汽車零部件、5G通訊等行業(yè)對柔性化生產(chǎn)的需求不斷攀升,柔性供料正逐漸成為生產(chǎn)線的標準配置方案。如何在此基礎上進一步實現(xiàn)更高的UPH與精度、加快方案交付與縮短工期,已成為核心用戶關注的焦點。
● 現(xiàn)有方案的痛點:
在設備商與系統(tǒng)集成商的實際應用中,為了滿足這些需求,往往需要堆疊多套硬件架構、配置多套軟件界面。這種方式雖然功能齊全,卻讓系統(tǒng)變得復雜,終端操作人員使用門檻升高,難以實現(xiàn)真正意義上的“傻瓜化”操作模式。
● 打破壁壘,深度耦合創(chuàng)造價值:
只有通過將供料、視覺與機械手控制進行高度一體化,才能夠為用戶的產(chǎn)線導入更穩(wěn)定、易用、高效、通用化的解決方案。
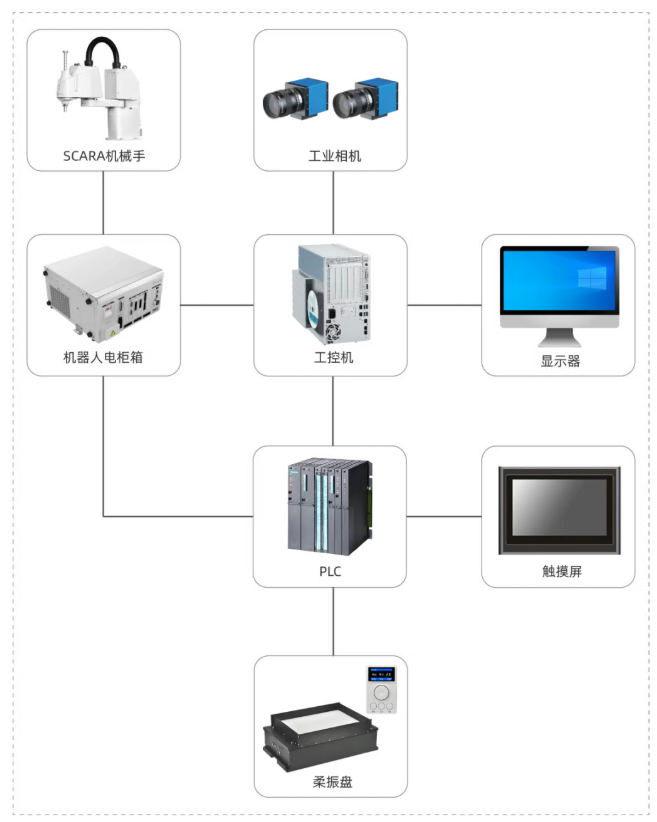 ▲市面上常見機械手柔性供料方案配置▲
▲市面上常見機械手柔性供料方案配置▲
當供料系統(tǒng)、視覺與機械手不再為各自而戰(zhàn),柔性供料才真正實現(xiàn)快、準、穩(wěn)!
基于市場需求,正運動依托VPLC系列機器視覺運動控制一體機,推出柔性機械手視覺供料解決方案,從根本上突破了傳統(tǒng)柔性供料的“剛性”限制。

▌正運動解決方案
識別率≥99%,UPH提升10%-20%,換型時間縮短60%,重復定位精度:±0.02mm。
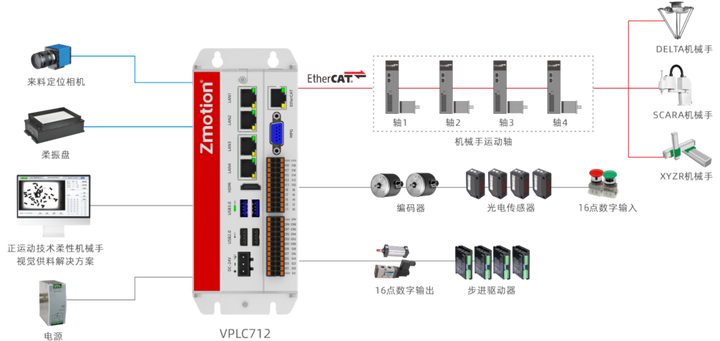
正運動打破局限,方案將“柔振供料+視覺+機械手控制”進行軟硬深度耦合,既簡化了系統(tǒng)集成,又增強了組件間的互操作性,實現(xiàn)真正的無縫運行控制,讓產(chǎn)線具備“感知-決策-執(zhí)行”的閉環(huán)控制,零件無論以何種姿態(tài)堆放,都能被視覺系統(tǒng)精準定位,并完成下發(fā)指令給機械手完成柔性上料操作,大幅提升無序分揀效率。
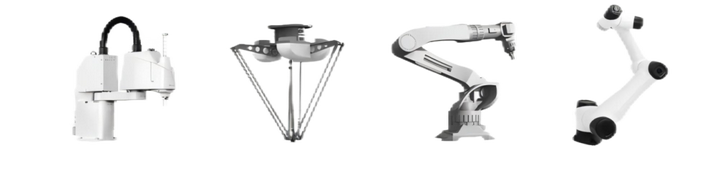
方案支持DELTA、SCARA、XYZR等多種機械手模型算法,已在多個細分行業(yè)廣泛應用,為用戶提供更易用、高效、穩(wěn)定、通用的解決方案。
SCARA機械手柔性供料運行視頻可點擊→“SCARA機械手柔性供料運行視頻”查看。
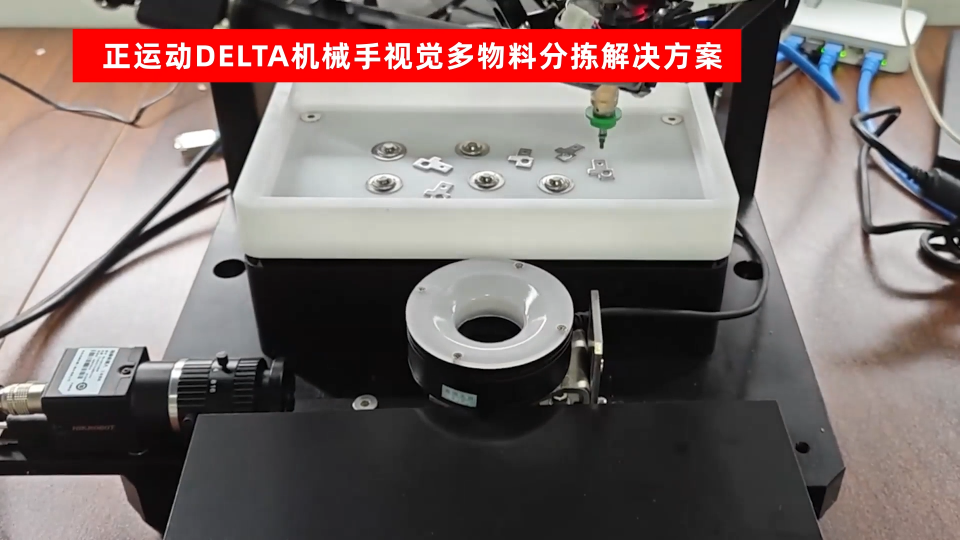
DELTA機械手柔性供料運行視頻可點擊→“DELTA機械手柔性供料運行視頻”查看。
XYZR結(jié)構機械手柔性供料運行視頻可點擊→“XYZR結(jié)構機械手柔性供料運行視頻”查看。
正運動解決方案核心工藝流程:視覺+運動控制閉環(huán)
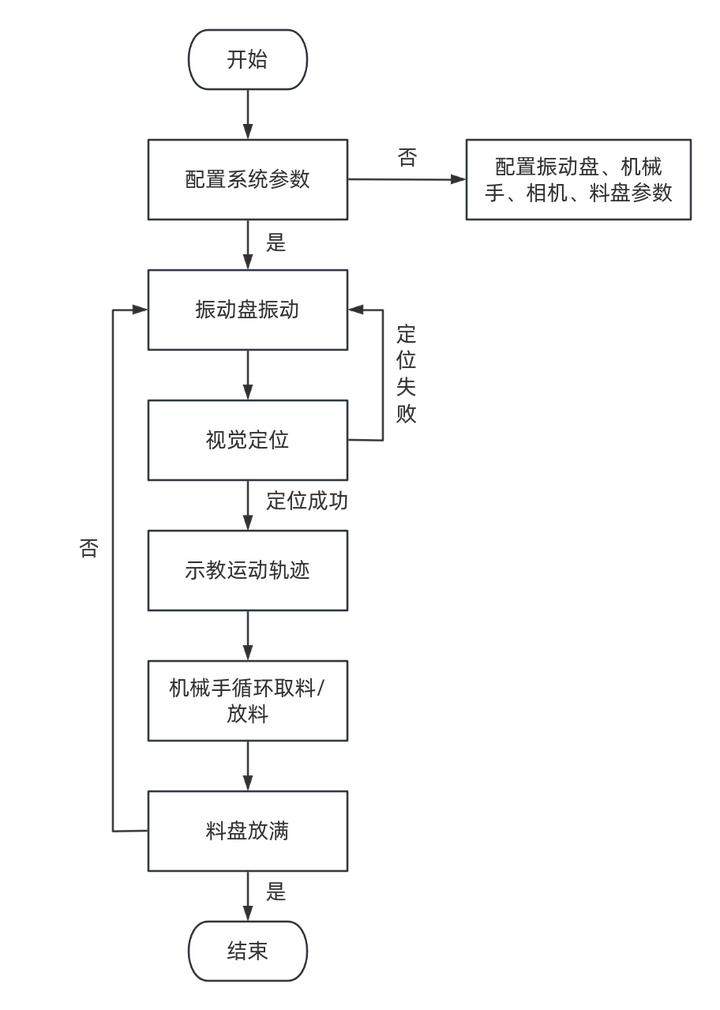
這一閉環(huán)工藝讓零件從“無序”到“有序”,真正實現(xiàn)快、準、穩(wěn)的柔性供料與分揀。
方案可保存多物料的視覺與運動控制配置,一鍵切換工藝包。新零件僅需更換識別模板或參數(shù),無需重新設計治具,即可大幅縮短換型周期、提升進給速度,減少停機時間并提高生產(chǎn)效率,輕松滿足多品種、小批量、多批次訂單的柔性生產(chǎn)模式需求。
正運動柔性機械手視覺供料解決方案優(yōu)勢
01 軟硬件高度集成
集成IO控制、機械手控制、機器視覺、運動控制與通訊于一體,無需額外配置工控機、機器人控制電柜箱、降低成本的同時提升設備安裝空間,縮短項目開發(fā)周期與技術維護難度。
02 功能操作簡單
易于理解和快速掌握的調(diào)試界面,將機械手調(diào)試、機器視覺調(diào)試、柔振盤調(diào)試等功能集成在一個頁面。面向多品種小批量的物料,實現(xiàn)高效快捷產(chǎn)品換型。

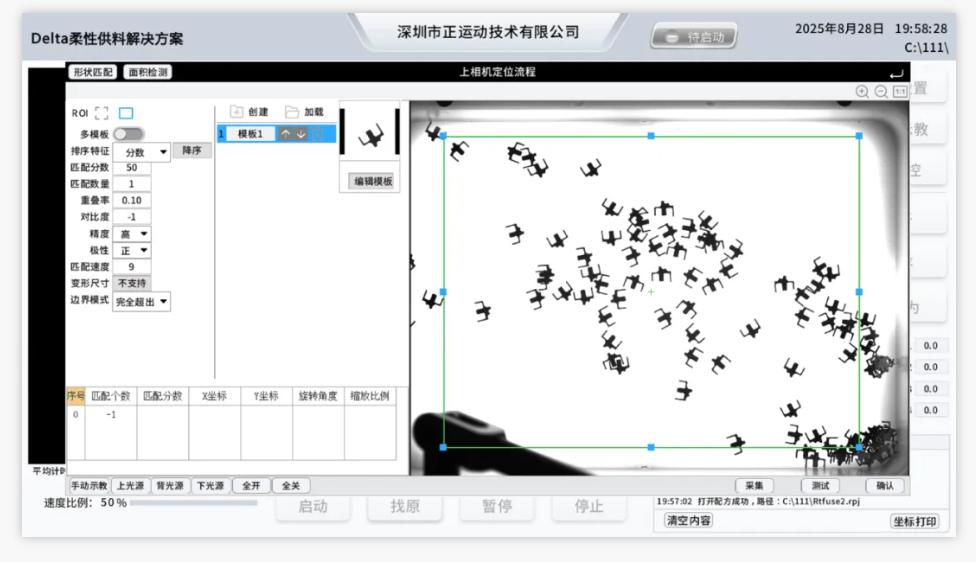
03 一鍵快速生成視覺模板
快速搭建視覺工具流程,無需編寫復雜的上位機視覺代碼。通過拖拽視覺工具完成功能實現(xiàn),框選式建模板使用更加簡單。
04 工藝功能豐富
支持陣列擺盤、定點供料、自定義裝配、盤中盤陣列、圓型擺盤、下相機飛拍、皮帶動態(tài)抓取、圓形柔振盤動態(tài)抓取等,滿足市面上常見應用需求。

05 多結(jié)構柔性供料
支持市面上常見的XYZR模組機械手、DELTA并聯(lián)機械手、SCARA機械手等,同一套柔性視覺供料解決方案界面,根據(jù)應用場景不同,選擇相應結(jié)構。
06 自定義功能擴展
支持用戶使用Basic語言、HMI組態(tài)實現(xiàn)自定義功能拓展,周邊附加軸與IO邏輯控制。修改部分非標動作工藝完成。
正運動柔性供料解決方案界面操作運行視頻可點擊→“正運動柔性供料解決方案界面操作運行視頻”查看。
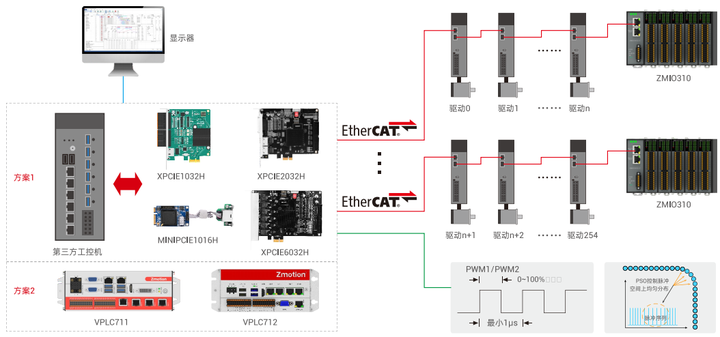
一、機器視覺運動控制一體機VPLC7系列

可選4-64軸運動控制(脈沖+EtherCAT總線),EtherCAT最小通訊周期250us;
內(nèi)置強實時運動控制內(nèi)核MotionRT750,支持第三方視覺軟件;
板載20路通用輸入(其中VPLC711的10路和VPLC712的8路為高速輸入),20路高速輸出;
基于x86架構的EtherCAT總線視覺運動控制器,支持脫機運行,內(nèi)置豐富的視覺和運動控制功能,大幅簡化配置流程;
支持EtherCAT冗余功能,解決單點故障停機,自動診斷并持續(xù)運行,增強系統(tǒng)可靠性,簡化維護工作;
提供一體化開放式IPC形態(tài)的實時軟控制器/軟PLC集成的視覺+運動控制解決方案。
二、強實時運動控制內(nèi)核 - MotionRT750
x86架構Windows/Linux系統(tǒng)下獨占CPU內(nèi)核的運動控制實時內(nèi)核。
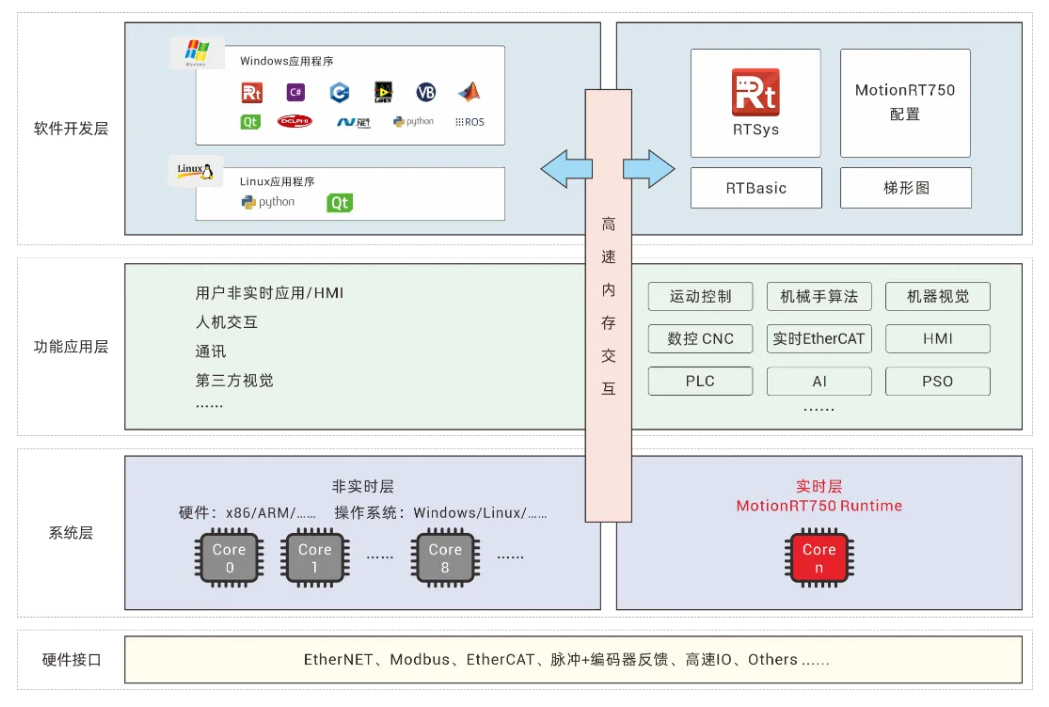
支持多達254軸的高精度運動控制,控制周期可低至125us,顯著提升設備性能,助力產(chǎn)能提升至少20%。
單條指令的交互時間為1-3us,相較于傳統(tǒng)的PCI/PCIe、網(wǎng)口等通訊方式,速度提升了10-100倍以上 。

搭載環(huán)形冗余架構,確保非故障從站持續(xù)保持正常EtherCAT通信,可顯著提升系統(tǒng)可靠性與運行穩(wěn)定性。可有效杜絕EtherCAT通訊故障導致的產(chǎn)能損失。
當Windows因病毒入侵、硬件異常插拔或驅(qū)動沖突導致系統(tǒng)崩潰時,運動控制實時內(nèi)核 MotionRT750仍可持續(xù)運行,且急停功能仍然保持有效,提供充分響應時間進行事故處置,顯著提升工業(yè)控制安全性與可靠性。
審核編輯 黃宇
-
機械手
+關注
關注
7文章
358瀏覽量
31453
發(fā)布評論請先 登錄
UPH達不到標稱值?瓶頸可能在上下料,而不在燒錄速度
適配FOUP載具的晶圓搬運機械手,哪些型號維護更便捷?
射頻RFID+機械臂:工業(yè)零部件加工后智能分揀
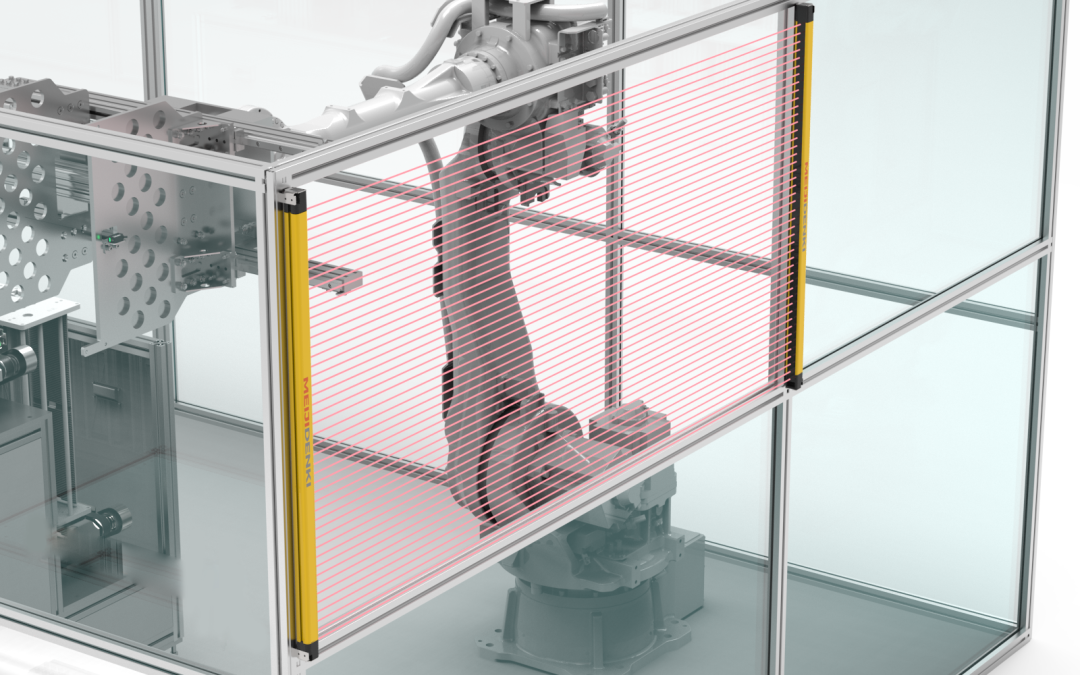
明治人機協(xié)作安全解決方案:環(huán)形光幕柔性防護系統(tǒng)
FOSAN 富捷科技:揭秘掃地機器人 “長手” 背后的硬核半導體支撐

ProfibusDP轉(zhuǎn)DeviceNet施耐德PLC聯(lián)合西門子S7–1200提升物流倉儲貨物分揀效率技術案例

SCARA機械手:工業(yè)自動化領域的精密多面手

Amazing Hand:一個開源的3D打印仿真機械手項目


運動控制模塊:Delta機械手柔性上下料開發(fā)零門檻!

視覺運控一體機在DELTA并聯(lián)機械手動態(tài)跟隨抓取的應用

桁架機械手直線模組滑臺 五大核心技術打造無人車間新標桿
profinet轉(zhuǎn)ethercat網(wǎng)關的自動上料機械手集成案例




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論