CW32F003 有沒有BOOT引腳,是不是和STM32F0 不一樣
2025-12-26 06:39:15
隨著人工智能技術的不斷進步,人機交互的方式正變得更加自然與高效。一款基于聯發科MTK八核處理器的AI對話機器人方案脫穎而出,憑借其強大的性能、多樣化顯示方案和卓越的語音交互能力,成為家庭、教育、智能服務等場景中不可或缺的智能助手。
2025-12-24 20:19:04 105
105 
Type-C接口已經成為現代電子設備充電和數據傳輸的標準,但許多用戶在使用過程中卻會發現,即便是外觀相同的Type-C接口,其實并不是所有設備都能通用。 在Type-C接口的統一外觀下,有些
2025-12-24 09:26:22347 
的布局進行挖空。
器件布局都不一樣,反焊盤不一樣不是很正常嗎?
如果只是這個問題,高速先生當然不會寫這篇文章啦。小劉的問題顯然更有深度:除了大小,為啥這倆反焊盤的挖空層數也不一樣呢?板上常規設計AC
2025-12-23 09:24:11
的想法,所以前面的一些走線長度和阻抗的優化調整意見給到他們的時候,他們也能夠接受,并且表示贊同。當我們提出最后一項優化方案后,他們就表示出了深深的不太理解了。
這一條意見就是讓表底層的走線特意做成不一樣長
2025-12-11 10:43:45
?你的設備斷電后還能撐多久?這個問題的答案遠比一個簡單數字復雜得多。深夜辦公室里突然停電,服務器機柜的報警聲在黑暗中格外刺耳——此時UPS顯示器上的倒計時數字成為決定數據安全的關鍵。在現代化辦公環境
2025-12-10 10:12:09417 
CW-DAPLINK 調試器和市面上的通用DAPlink功能一樣嗎?
2025-12-08 07:02:34
應用,特別是機器人操作系統領域的可行性。MUSE Pi Pro以其強大的K1 AI CPU和官方對主流開源軟件棧的積極適配,成為了一個非常有吸引力的選擇。
二、 硬件初窺:性能小鋼炮
MUSE Pi Pro
2025-12-03 14:40:05
電子發燒友網報道(文 / 吳子鵬)當前,“MCU+”戰略已然成為半導體公司重要的發展戰略之一,旨在通過微控制器單元(MCU)的功能擴展和集成創新,提升產品競爭力和市場價值。對于國產半導體廠商而言
2025-12-02 09:50:445002 通過自研系統封裝庫,易安卓將復雜的系統控制能力以接口形式開放給開發者,讓系統功能調用像寫應用邏輯一樣簡單。
2025-11-27 11:40:5387 
社區,已經提供好了相關的組裝視頻教程,大家基本上可以按照上面視頻組裝即可。
我就只來點不一樣或者說要注意的地方,現在這樣裝的小車看起來會比較清爽整潔、線束不會顯得零亂。
4、源程序編譯與下載
注
2025-11-24 23:44:54
3000W機器人雙工位翻轉平臺激光焊接機這款設備是現代高端智能制造的典型代表,它集成了大功率激光器、工業機器人、自動化雙工位翻轉平臺及先進控制系統,實現了高效率、高精度、高質量的自動化激光焊接。一
2025-11-24 13:56:24
一、背景:機器人邁向“微米級控制時代”
隨著智能制造和自動化產業的持續升級,工業機器人不再僅僅承擔重復搬運,而是被要求在裝配、檢測、精密加工等高精度場景中完成微米級控制任務。
在這些“高精度機器人
2025-11-14 15:48:29
通過這篇文章,你們能看到一些與你們想象不一樣的隔離地過孔的設計方式。。。
2025-11-14 14:03:1210 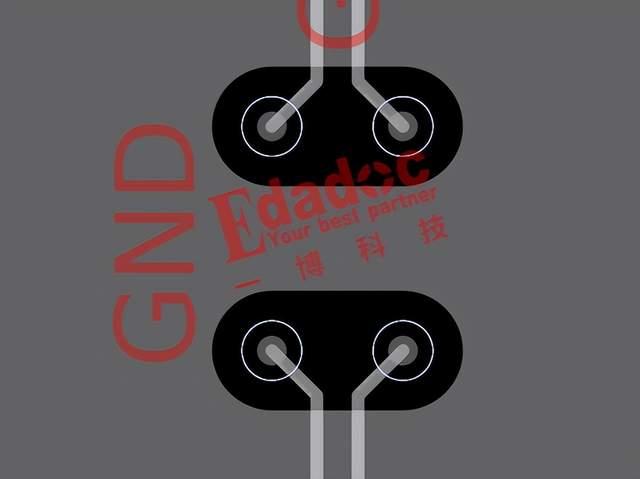
匯編語言機器才能讀懂,所以每個平臺的編譯器編譯成對應平臺匯編的程序,每個平臺的匯編不一樣,當然編譯器也不一樣。 DOS上的TC2 TC3 WINDOWS上的VC 8051的C51都有自已的編譯器。具體
2025-11-14 07:55:24
”。本屆展會人氣火爆,展期三天累計接待總量達到11.23萬人次。參展企業集中發布年度新品數約2500件,新品發布與商業合作收獲頗豐。 不一樣的全“芯”布局 聚焦核心+特色雙軌賽道,產業全鏈一展盡覽 2025灣芯展以“芯啟未來 智創生態”為主題,吸引全球
2025-10-29 16:56:591172 
,已經成為機器人開發者不容忽視的核心處理器。而米爾電子的MYD-LR3576開發板,則以其豐富的接口、穩定的性能和成熟的軟硬件支持,為快速原型驗證和產品開發提供了絕佳的平臺。如果您正在尋找一款能夠同時處理復雜視覺任務和豐富交互界面的機器人主控方案,RK3576無疑是當前最具性價比的選擇之一。
2025-10-29 16:41:20
我們都知道USB接口有很多類型,然而熟悉的HDMI接口,它也有很多不一樣的接口,本文將圍繞HDMI的不同接口類型進行解析。
2025-10-28 16:11:424416 
礦用防爆本安型手機是一種專為煤礦、化工、油氣等高危環境打造的安全通信設備,采用本質安全防爆設計(Ex ib IIC T4 Gb),通過GB/T3836系列標準認證。具備IP66防護等級、防摔防塵防水、4300mAh長續航和掃碼/RFID數據采集功能,是礦山智能化與安全生產的關鍵終端。
2025-10-24 16:02:47619 
代替,
LED,
有大佬感興趣,
一起關注和討論代碼,
這個機器人知名度不高,
可是是機器人的原型,
如果開放接口,
定位和無線充電,
也不失為未來的禮物。
讓我們為小蘿卜工程師的,
自掏腰包救蘿卜
2025-10-23 05:24:26
內,打造一場"不一樣的展會",呈現出"不一樣的精彩"。本屆展會人氣火爆,展期三天累計接待總量達到11.23萬人次。參展企業集中發布年度新品數約2500件,新品發布與商業合作收獲頗豐。 ? 不一樣的全"芯"布局 聚焦核心+特色雙軌賽道,產業全鏈一展盡覽 2025灣芯展以"芯啟未來 智創生態
2025-10-19 20:27:45432 
尾纖的方頭(通常指SC、LC等方形接口)和圓頭(通常指FC、ST等圓形接口)在結構、應用場景、性能及操作便利性上存在顯著差異。以下是兩者的詳細對比及適用場景分析: 一、接口類型與結構差異 二、性能
2025-10-13 10:49:39589 
如題,怎么像kell一樣設置rom下載起始地址?
2025-10-10 07:21:47
rt-thread studio如何想keil一樣在線查看變量?是我操作不對嗎?還是本來就沒有這個功能?
2025-09-17 06:07:17
在RTT studio中基于開發板創建項目,芯片選擇是一樣的,但是彈出的開發板和我購買到的不一樣,這種情況下會有問題嗎?
不用RTT studio,使用env工具,選擇開發板使用的芯片BSP,再編譯后燒錄是不是就可以創建工程項目了?BSP是不是只和芯片有關呢?
2025-09-16 06:40:57
代碼片段如下:
運行結果:
可以看到,在線程延時后,再恢復運行時,用rt_thread_self函數獲取到的值與沒有延時時獲取到的值不一樣了,導致mutex無法釋放,其它等待這個mutex的線程都無法運行了,應該怎么處理這個問題?
RTThread還不太熟悉,跪請大佬們指點!
2025-09-09 08:06:58
南柯電子|現場解決EMC電磁輻射干擾:“望聞問切”,像中醫一樣
2025-09-04 09:47:14535 專為中國設備出口沙特設計:三相220V轉380V變壓變頻電源,破解電壓頻率差異難題,卓爾凡電源方小姐139-2926-3356 ——東莞卓爾凡電力科技助力“中國制造”無縫適配沙特電網 一、沙特
2025-08-13 17:09:262510 
產品簡介經世智能實驗室物料轉運復合機器人,復合機器人在智慧實驗室行業主要應用于實驗樣本自動化轉運、高通量實驗流程銜接、危險物料與廢棄物處理等環節,通過“AGV移動底盤+協作機械臂+視覺系統”一
2025-08-13 10:06:22
產品簡介經世智能CNC上下料復合機器人,復合機器人集成AGV+機械臂+視覺系統,提供CNC多工序柔性上下料、CNC全自動刀具更換自動化解決方案,打通生產物流最后“一公里"。機器人機械臂末端可定制末端
2025-08-13 09:47:30
當傳統的實時示波器還在帶寬和測試精度上努力突破時,一種“不一樣”的示波器卻早就彎道超車,走上捷徑,甚至讓人懷疑其是否滿足被反復提及的奈奎斯特采樣定律?
2025-08-12 14:23:481640 
黑芝麻智能AI全棧機器人計算平臺榮膺新加坡年度"GO! Technology Utilisation Winner",作為面向新一代機器人實時AI推理打造的全棧計算平臺,該方案已成功部署于清潔、巡檢及移動機器人平臺。
2025-08-07 17:35:191865 但是這樣子使用的話,我只能通過這個虛擬IP來連接設備,那樣子我的PLC編程軟件就不能連接上設備了因為IP和實際的不一樣,我能通過什么辦法來讓映射出來的虛擬IP和我的實際設備IP一致嗎?是要需用虛擬網卡還是怎么樣子?
2025-08-06 07:54:23
特斯拉計劃未來五年內生產100萬臺Optimus機器人。 ? 根據目前公開的信息,特斯拉OptimusV3機器人將采用全新的設計,與前代V2相比幾乎都不一樣,其設計被認為是非常精致的,可能會更接近 2021 年公司首次展示的 Optimus 人形機器人概念,有望成為市場上最具未
2025-08-04 09:09:163011 說實話,剛開始聽說萊姆(LEM)傳感器的時候,我還有點猶豫。雖然身邊做電源開發、充電樁設計的朋友都在用這個牌子,但我這個人比較謹慎,畢竟傳感器這種東西,穩定性、精度、抗干擾能力都挺關鍵,一旦出問題
2025-07-30 10:28:46368 
市場上的LED燈具經常發生因為散熱不足而導致死燈等問題,因此LED的散熱問題就成了LED廠商最頭痛的問題,大家都明白保持LED長時間持續高亮度的重點是采用導熱能力強的鋁基板,而鋁基板的導熱系數則是評價鋁基板質量的重中之重。市面上鋁基板的導熱系數標稱值有1.0,1.5,2.0,然而很多出現問題的燈具廠商對燈具進行失效分析后,發現鋁基板導熱系數并沒有標稱值所示,
2025-07-25 13:24:40438 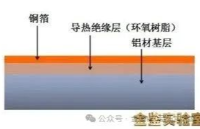
在計算機系統中,主板是掌握整個系統的核心硬件,主要功能是傳輸各種電子信號,部分芯片也負責初步處理一些數據,并且負責連接和協調所有其他硬件部件的工作。
2025-07-17 09:55:56370 清洗對清洗質量要求很高,常常應用幾種不一樣的清洗液在不一樣的槽內或依次進行,每種清洗液的作用都是不一樣的。例如,三氯乙烯、氫氧化鈉水溶液、合成洗滌劑、水、酒精依次
2025-07-11 16:41:47380 
請問下 cyw920719b2q40evb 如何設置每一個藍牙芯片的mac地址不一樣呢? 謝謝
2025-07-07 06:34:25
設想未來,機器人能像動物一樣敏捷地穿越崎嶇地形,處理危險或重復性的任務,例如檢查受損電線或搜尋災后廢墟,人類將無需身涉險境。云深處科技 (DEEP Robotics) 的四足機器人已在工業巡檢和緊急
2025-07-03 14:40:521231 伙伴,它可不只是像手機里的智能助手那樣,只能在屏幕上跟你交流。這個機器人是有實體的,它能像人一樣在房間里自由活動。它配備了各種 “感官”,比如攝像頭就如同它的眼睛,能讓它看清周圍的環境;傳感器就好比它的觸覺,能感知物體
2025-06-19 09:21:261484 
JD6606SP5-AF 和 JD6606SP5 是一樣的嗎
2025-06-11 10:37:11
PCB中的數字地和模擬地 ? 為什么PCB要分數字地和模擬地 雖然是相通的,但是距離長了,就不一樣了。同一條導線,不同的點的電壓可能是不一樣的,特別是電流較大時。因為導線存在著電阻,電流流過時就會
2025-06-10 13:29:20620 我這運行kmodel模型驗證一直報錯,所以沒法做kmodel模型好壞驗證,不知道怎么解決這個問題,重新訓練一個kmodel模型會和拿相同pt訓練的模型效果不一樣嗎?在線云訓練效果會好嗎?
或者大佬能不能說是我給您發pt、onnx、kmodel模型您幫幫驗證一下好嗎?
2025-06-10 08:02:30
工程師,你們覺得下面兩對表層的高速走線,長度完全一樣,性能會有區別嗎?
沒有過孔,就是表層的差分走線,乍一看,還真沒什么不一樣,硬要說有哪里不同的話,那就只有差分繞等長的位置不一樣,但是兩根走線也不需要單獨
2025-06-09 14:34:00
驅動一樣,VID和PID也一樣,只有USB描述符序列號不一樣,這2臺設備的硬件FPGA程序不一樣,用途不一樣,分別依照C++ CYAPI編程手冊編寫了2套不同的上位機控制程序。現在這2臺設備連接到同一
2025-05-19 07:27:37
我想通過I2C訪問閃存來測試對cy7c6541的訪問,但是訪問結果好像與datasheet不一樣。
是否有關于 cy7c6541 閃存或 eeprom 的數據表? 或者有其他方法可以幫我完成訪問測試(讀取rom/flash里的值然后和標準值對比)?
2025-05-19 06:44:30
不少朋友在做系統集成或設備選型時,經常會問一個看似簡單但又容易混淆的問題:圖像采集卡和顯卡一樣嗎?一個是“采圖”的,一個是“顯圖”的,聽起來差不多,功能是不是也差不多?能不能互相替代?到底該怎么選?
2025-05-14 09:52:141194 
Athena機器人****開發平臺思嵐推出Athena機器人開發平臺,有望主導機器人開發平臺未來市場-電子發燒友網AUTO CUBEROS機器人開發平臺AUTO CUBEROS機器人開發平臺-電子電路
2025-05-13 15:02:04
cyusb3014 slave fifo 模式 In 和 Out 緩存大小設置不一樣時(比如:U2P DMA緩存16K,P2U DMA緩存1K),可以測出來實際就是設置值,但在USB Control Center 顯示的USB信息都顯示 16K, 這個 需要怎么修改才能讓USB信息是正確的呢?
2025-05-13 06:55:42
高速先生成員--黃剛 ? 不可能吧?電容不還是那個電容嗎?為什么接到1V的直流電壓時和接到3.3V的直流電壓效果會不一樣?相信大多數粉絲都不知道這個point吧。的確,如果大家沒聽過DC-Bias
2025-05-12 14:02:13787 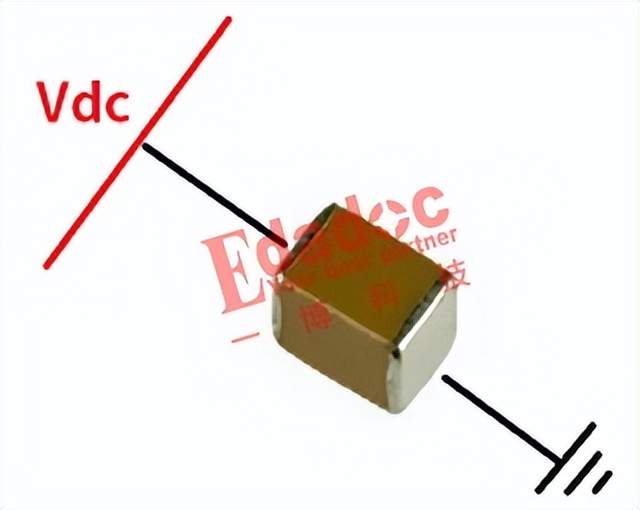
,則是協調全身的“大腦”與“小腦”,既要像大腦一樣思考決策,又要像小腦一樣精準控制運動。作為具身智能機器人的核心樞紐,控制器直接決定了它能否在復雜場景中“像人一樣靈活”,甚至超越人類的精準與可靠。 從“零件
2025-05-11 17:42:47935 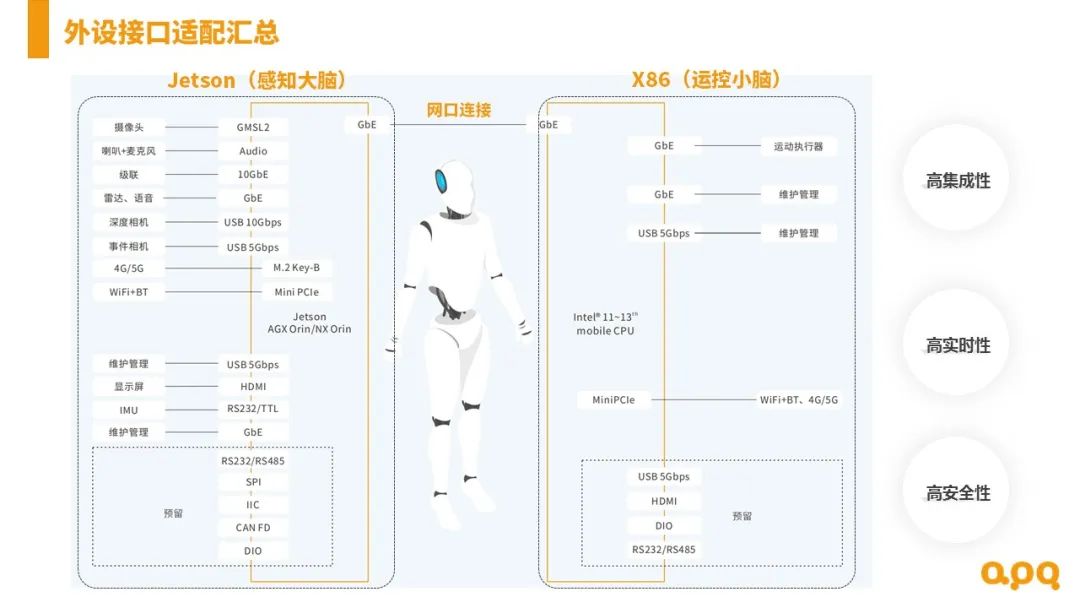
貼片電容和瓷片電容并不完全一樣,它們在結構、材料、特點和應用等方面存在一些差異。以下是對這兩種電容器的詳細比較: 一、結構差異 貼片電容: 結構上,貼片電容是一個硅芯片,電極片被鍍在芯片的兩側,外面
2025-04-30 15:05:44713 
模型,將模型轉化為嵌入式AI模型,模型升級AI攝像機,進行AI識別應用。
AI訓練模型是不斷迭代優化過程,譬如,100個數據樣本模型的識別準確率和10萬個數據樣本的識別準確率,不一樣,AI模型理論上是客戶采集訓練樣本越多,準確率越高,誤報率越低。
2025-04-28 11:11:47
識別聯調。
進迭時空致力于為智能機器人提供完整全棧優化的RISC-V AI軟硬件解決方案,第一代RISC-V AI CPU芯片K1已完成AI視覺感知、AI語音處理、自動避障、路徑規劃、運動控制等
2025-04-25 17:59:18
AD5421后綴AD5421B 和AD5421C是完全一樣的嗎?
2025-04-24 06:39:52
超六類水晶頭和六類水晶頭不一樣,兩者在結構設計、性能要求、應用場景等方面存在明顯差異。以下是具體分析: 1. 結構設計差異 六類水晶頭 內部結構通常為單排8針觸點,線槽設計適配六類網線(線徑約
2025-04-16 10:30:449229 
的“神器級”對齊功能 ,讓你擺器件像擺積木一樣絲滑! ? ? 一、一鍵對齊,全場整整齊齊 ? ? 大多數設計軟件都是靠格點對齊,雖然能用,但總是差點意思。 Altium 可不一樣,它直接給你內置了超全的 智能對齊+等間距排布功能 ! 想左對齊?右對齊? 橫向平均分?縱
2025-04-14 09:09:064516 
能力。 ? 在電子發燒友網《人形機器人的電機控制和傳感器》專題中,芯海科技模擬信號鏈產品線總經理李曉在接受電子發燒友網采訪時指出,人形機器人的發展將如同汽車一般,成長為一個規模龐大的產業,進而催生出廣泛的芯片需求,
2025-04-10 00:09:002857 
我國出口 “新三樣”對錫膏的要求顯著高于傳統消費電子。新能源汽車需耐高溫、抗振動且通過無鹵素認證的高可靠性錫膏;鋰電池要求低電阻、耐電解液腐蝕的高精度產品;光伏組件需要抗紫外線、耐候性強且能適應極端
2025-04-08 10:32:30902 
DMA 模式的 ADC1組的數據,它使用硬件中斷塊作為墻,就像在中斷模式下配置的 ADC2組一樣。
我的問題是為什么使用這個塊,以及是否有必要讀取 ADC1組的值。盡管在 DMA 模式下配置,但此組是否在轉換結束時生成中斷?
在其他位置調用 adc_readgroup 函數的工作方式不一樣嗎?
2025-04-08 06:39:24
機器人激光焊接機:高精度自動化焊接的未來1. 概述機器人激光焊接機是一種集成了工業機器人和激光焊接技術的先進自動化設備,通過高能量密度的激光束實現快速、精準的焊接。該系統結合了機器人的靈活運動
2025-03-28 14:04:12
不一樣。很多人認為服務器與普通電腦只是規模差異,實則二者系統設計存在本質區別。服務器作為承載企業核心數據的"數字心臟",其系統架構需滿足7×24小時高負載運行、數據安全防護等特殊需求。本文將深度解析服務器的系統和普通電腦系統一樣嗎,并為大家推薦適配解決方案。
2025-03-28 09:48:231098 編者按算力網,是否像電力網一樣?算力網,的確具有類似電力網一樣的“網”的特征,一邊鏈接智算中心(類似電廠),一邊觸達使用算力的企業(如使用電力的工廠、大樓、社區等)。但算力網,又不能僅僅是這些。算力
2025-03-24 11:45:39623 
網線是可以像電線一樣接的,但需要注意一定的方法和步驟以確保連接的穩定性和信號傳輸的質量。以下是對網線連接的詳細分析: 一、網線連接的基本方法 直接纏繞法: 將斷開的網線兩端剝開,露出內部的裸銅導線
2025-03-14 10:03:295028 參照STM32WLE5的官方PKA例程,2048位的模密運算結果和在線工具計算的結果不一樣,有遇到類似情況的朋友嗎
2025-03-10 07:28:23
一下。下圖柵極分開后量P管D極也才3mV,怎么會使N管導通呢?P管是MDD2301,N管是2N7002K。
2025-03-06 06:14:21
。
還有一點就是本書與其他AI書不一樣的是,其他的書上來就動不動是一堆公式,定理,推導過程等內容,讓初學者一看就想睡覺,而這本書不一樣,都是簡單的講一下原理就上馬開發了,非常的過癮啊。
三、對于AI
2025-03-05 20:40:44
資格!
從 PC 到智能手機,下一個更大的計算平臺是什么?
最佳答案可能是 機器人 !
如果設想成真,則需要有人為機器人“造腦”,即打造適配的計算平臺及操作系統。
就像以計算機為平臺的計算機時代,和以
2025-03-03 14:18:22
給DLP4710EVM-LC更新了固件,更新的固件版本如下
現在開機畫面與更新前不一樣,為一組彩色條紋:
并且投影畫面為鏡像倒影
在GUI上有報錯
請問這是因為固件版本不對嗎?如何解決這個問題?
2025-02-25 08:13:44
固件燒錄進去后,開機畫面或者內部測試圖會一直閃并且在在黑白顛倒,比如第一張顯示棋盤格,第二張會將棋盤格中黑白顛倒去顯示。Spread Spectrum Enable 設置為 高和設置為低時,閃爍的頻率不一樣;
2025-02-20 07:24:47
投影儀應為是菱形的像素,投影的圖片和燒錄不一樣,要怎么轉換
2025-02-20 07:11:21
等于信號LED_SEL在一個幀時間內分別分配給R、G和B的總驅動時間和最短驅動持續時間之比。因此,我們得到以下測量結果:
數據表明,紅光的動態范圍為256.52,綠光的動態范圍為263.78,但藍光的動態范圍為128.07。一般來說,R、G、B的動態范圍應該不一樣吧?造成這種現象的原因是什么?謝謝!
2025-02-20 06:52:00
想再咨詢一下:
1、我看到4710有兩個型號,DLP4710和DLP4710LC,那么在兩個套件中的DMD是不是一樣的呢?
2、如果兩個套件用的DMD型號不一樣,DLP4710EVM-LC DLP?4710光控制評估塊這個套件能用來控制DLP4710投影顯示嗎?
2025-02-19 07:13:33
DLP3030EVM買回來連接ACP,顯示有報錯,左側控制條目和用戶手冊也不一樣,不知道是什么原因
2025-02-17 08:28:12
不一樣了。然后我換一個DA就好了,可是又過不到幾天又出現同樣問題。接連換了4塊DA,都是這樣。關鍵的這四片DA的錯誤輸出值都是一樣的。比如我程序給0.3V,輸出都為1.26V ,程序給1V,輸出都為
2025-02-14 06:24:58
在光通信技術飛速發展的當下,數據中心對高速、高效、低能耗的光互連解決方案需求日益迫切。CPO(共封裝光學)和LPO(線性驅動可插拔光模塊)作為兩種備受矚目的技術方案,在光模塊應用領域展現出各自的特點。然而,CPO在諸多方面相較于LPO具備明顯優勢。
2025-02-12 10:26:502900 
為什么我每次復位ADS采集到數據都不一樣啊 是時序問題嗎?
2025-02-12 07:06:20
為什么要費這么大勁讓機器人像人一樣,而不是更實用的形態? 將機器人設計成人形(即仿人機器人)的意義可以從多個角度探討,涉及技術、社會、心理和實用性等多個層面。以下是主要的考量點: 1. 適應人類環境
2025-02-10 10:03:031307
最近在調ADS1247這款芯片,試著讀地址為0x0a的IDAC0寄存器,但是每次讀出來的數都不一樣,不知道是什么原因?還有IDAC0寄存器讀出來的正確值是多少?
2025-02-10 07:13:44
您好,現在在調試ads1258,按照手冊上的步驟對其進行配置,但是讀出來的寄存器數據和寫入的不一樣,請高手指點一下。
ads1258的初始化配置如下:
void ADS1258_INIT
2025-02-08 07:44:18
一、AI 智能電話機器人的基本概念 AI 智能電話機器人是融合人工智能技術,模擬人類與客戶進行電話溝通交流的自動化程序系統。它借助先進的語音識別、自然語言處理和對話管理等技術,能夠自動撥打電話
2025-01-23 09:45:47802
現用單片機的SPI控制ADS1191,使用內置晶振時鐘,發送命令寫寄存器后,再讀取相應寄存器的值就不一樣,而且每次讀出來的都不一樣,設置讓CLK腳在起振后輸出時鐘信號,示波器也測不到相應的時鐘信號,請給予提示,已經停在這2天了。。。。。。
2025-01-23 08:38:24
最近用調試24位的ADS1294,器件我是設置為低功耗模式,采樣率設置為250、500、1k、2k時每種的采樣率實際為設置的一半,當采樣率設置為4k、8k、16k,時實際只有1.3k,了,這是為什么?
2025-01-22 06:03:31
無論您身在何處,只需將您的工具或電器直接插入EcoFlowRiver2PPS,即可獲得可靠的能源。UPS電源和便攜式電站的區別是什么?現在我們已經了解了每種設備的基礎知識,讓我們深入了解UPS和PPS之間的主要區別。功能最顯著的區別是,UPS旨在在意外停電時提供瞬時備用能源。便攜式發電站可作為移動能源。當主電源發生故障時,UPS將自動打開并為連接的設備供電。
2025-01-14 09:28:24796 
ldc上電后,即數字和模擬端都供電后,只連接spi的四根線到mcu,而其他腳都懸空,這種情況下能否讀寫ldc1000的寄存器。
為什么我在這種情況下都寫不進數據,讀數據也每次不一樣,哪怕是讀只讀的寄存器(device id寄存器)每次讀出的數據都不一樣。
2025-01-13 08:21:37
= duty;
k1++;
產生的spwm濾波后,饅頭波頻率為10hz,和理論值50hz,不一樣,這是哪里出錯了,求幫忙啊
2025-01-13 07:13:32
現在對ADS1258進行配置,對某一個寄存器寫指令,然后再次讀回來這個寄存器的值,為什么寫進去的和讀回來的不一樣?
2025-01-13 06:13:18
在用ADS1255測量數據遇到了同一個采樣電壓值,讀出來的數據不一樣。現在情況如下:采樣電壓用3.3v電壓,讀出來的數據穩定;模擬輸入差分電壓短接,相當于0輸入,采樣數據穩定;接上傳感器后,采樣數據開始跳變。想請教一下怎么解決這個問題。
2025-01-10 11:37:24
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論