電機(jī)(簡(jiǎn)稱(chēng)HB)。
步進(jìn)電機(jī)區(qū)別于其他控制電機(jī)的最大特點(diǎn)是,它是通過(guò)輸入脈沖信號(hào)來(lái)進(jìn)行控制的,即電機(jī)的總轉(zhuǎn)動(dòng)角度由輸入脈沖數(shù)決定,而電機(jī)的轉(zhuǎn)速由脈沖信號(hào)頻率決定。
步進(jìn)電機(jī)的驅(qū)動(dòng)電路根據(jù)控制信號(hào)工
2026-01-04 08:25:51
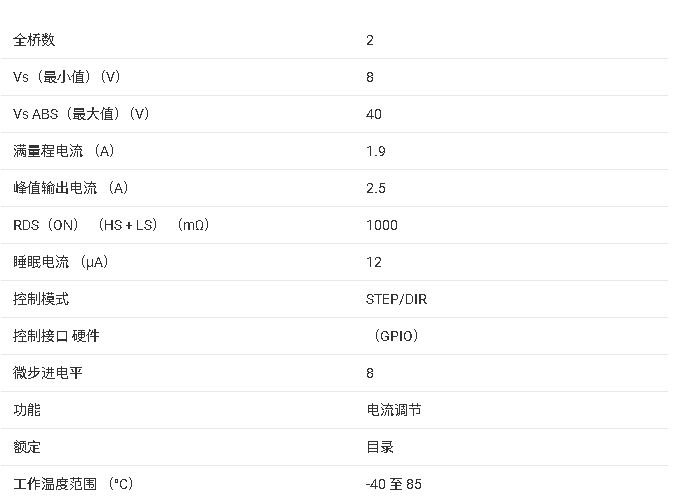
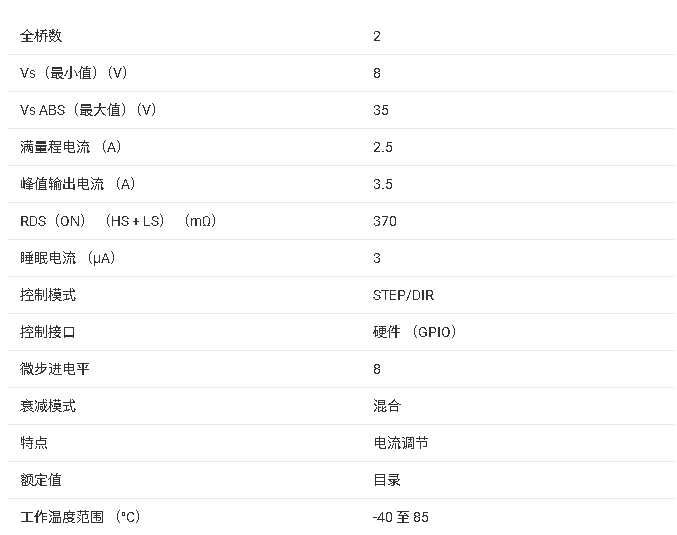
DRV8824-Q1 為汽車(chē)應(yīng)用提供集成
電機(jī)驅(qū)動(dòng)器解決方案。 該器件具有兩個(gè) H 橋驅(qū)動(dòng)器和一個(gè)微
步進(jìn)索引器,旨在驅(qū)動(dòng)雙極性
步進(jìn)電機(jī)。每個(gè)的輸出驅(qū)動(dòng)器模塊由配置為 全 H 橋驅(qū)動(dòng)
電機(jī)繞組。DRV8824-Q1 能夠驅(qū)動(dòng)高達(dá) 1.6A 的電流 輸出電流(在 24 V 和 25°C 時(shí)具有適當(dāng)?shù)纳崞鳎?/div>
2025-10-17 14:07:15 587
587 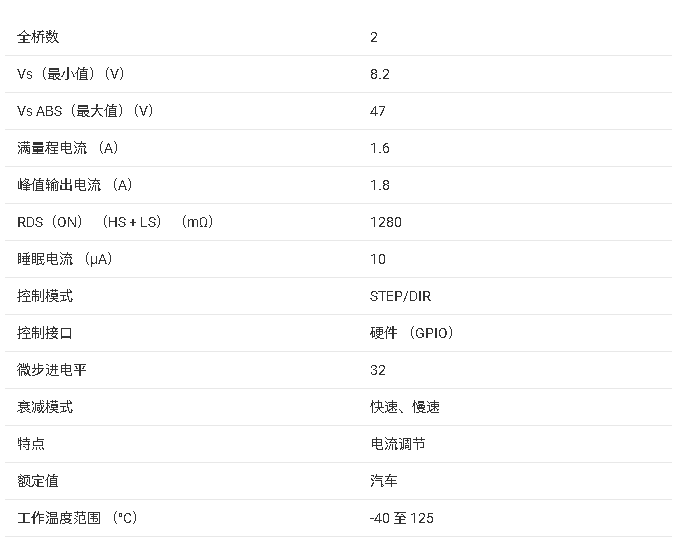
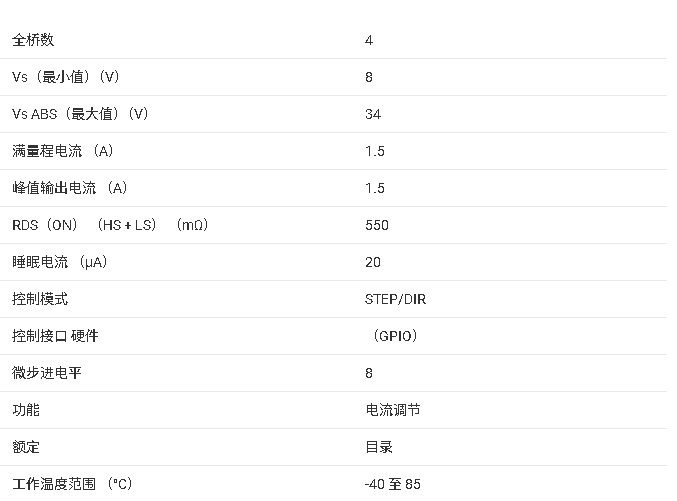
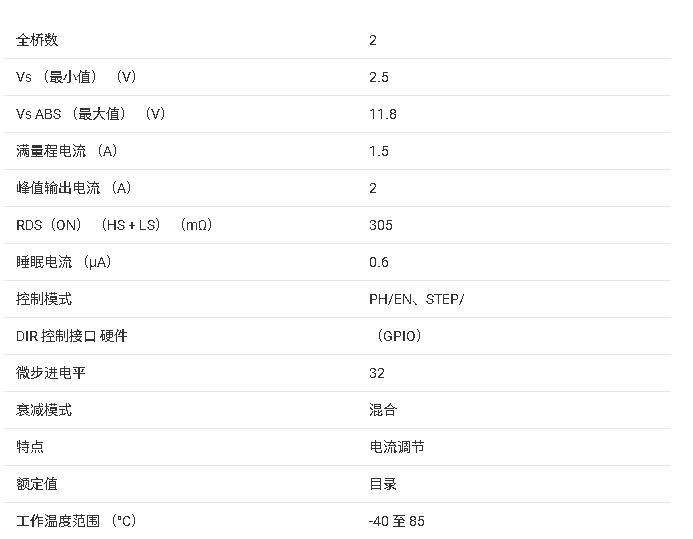
該DRV8846為相機(jī)、打印機(jī)、投影儀和其他自動(dòng)化設(shè)備應(yīng)用提供高度集成的步進(jìn)電機(jī)驅(qū)動(dòng)器。該器件具有兩個(gè) H 橋和一個(gè)微步進(jìn)分度器,旨在驅(qū)動(dòng)雙極步進(jìn)電機(jī)。每個(gè)H橋驅(qū)動(dòng)器的輸出模塊由配置為全H橋的N溝道
2025-10-17 13:59:28610 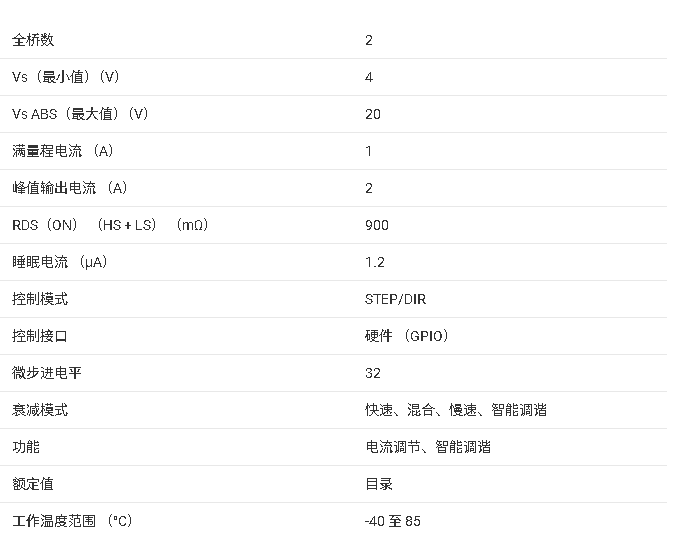
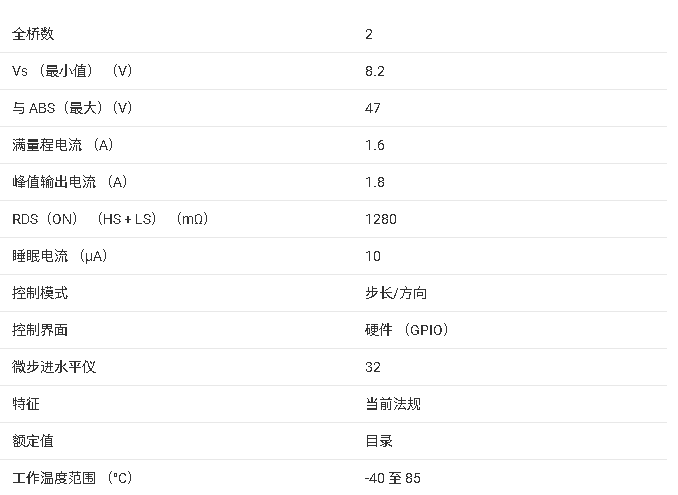
集成的解決方案,適用于驅(qū)動(dòng)微步進(jìn)兩相雙極步進(jìn)電機(jī)。它將用于N溝道MOSFET功率級(jí)的雙路全橋柵極驅(qū)動(dòng)器與嵌入式非耗散過(guò)流保護(hù)相結(jié)合。得益于新的電流控制,通過(guò)自適應(yīng)衰減模式實(shí)現(xiàn)1/16微步進(jìn),優(yōu)于傳統(tǒng)實(shí)施方案
2025-10-17 11:44:30433 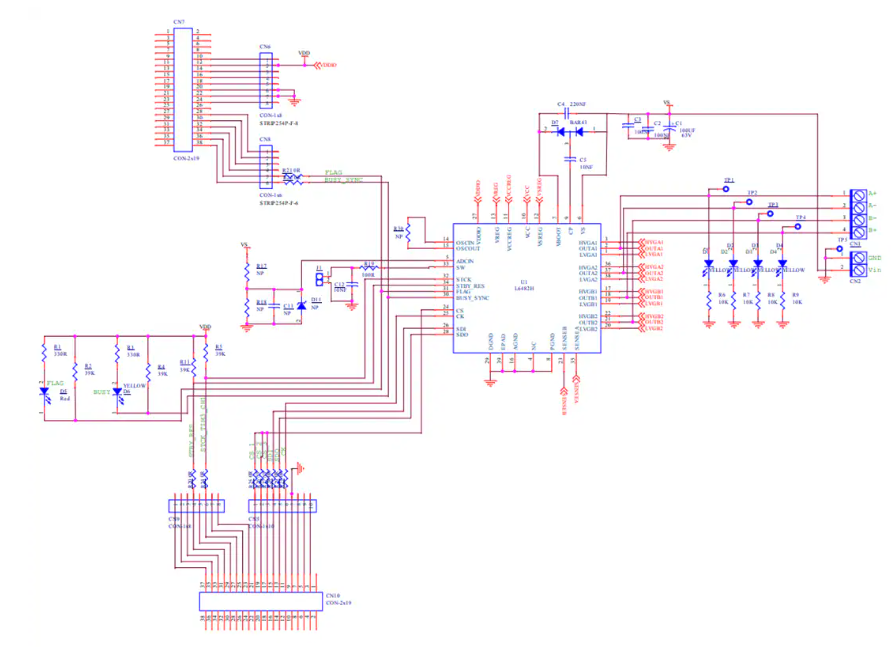
STMicroelectronics EVL6480步進(jìn)電機(jī)驅(qū)動(dòng)器評(píng)估板基于L6480,提供了一套既經(jīng)濟(jì)劃算又易于使用的解決方案,用于驅(qū)動(dòng)用戶(hù)應(yīng)用中的步進(jìn)電機(jī)。L6480器件是一套先進(jìn)、完全
2025-10-17 11:41:10394 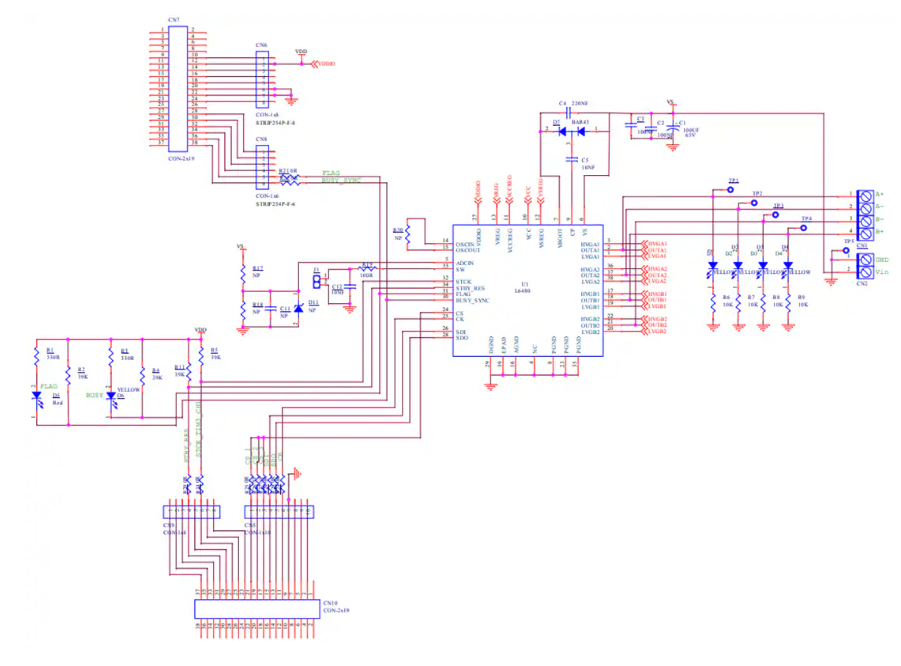
大家在運(yùn)動(dòng)控制的時(shí)候是用伺服電機(jī)的還是用步進(jìn)電機(jī)做定位控制了?為什么有時(shí)候用伺服電機(jī),有時(shí)候又步進(jìn)電機(jī)?這是什么原因呢?本期我們就一起來(lái)探討一下步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別!
2025-10-15 14:32:511496 
該DRV8462是一款寬電壓、大功率、高性能的步進(jìn)電機(jī)驅(qū)動(dòng)器。該器件支持高達(dá) 65V 的電源電壓,具有 100 mΩ HS + LS 導(dǎo)通電阻的集成 MOSFET,允許高達(dá) 10A 的電流
2025-10-13 15:10:52498 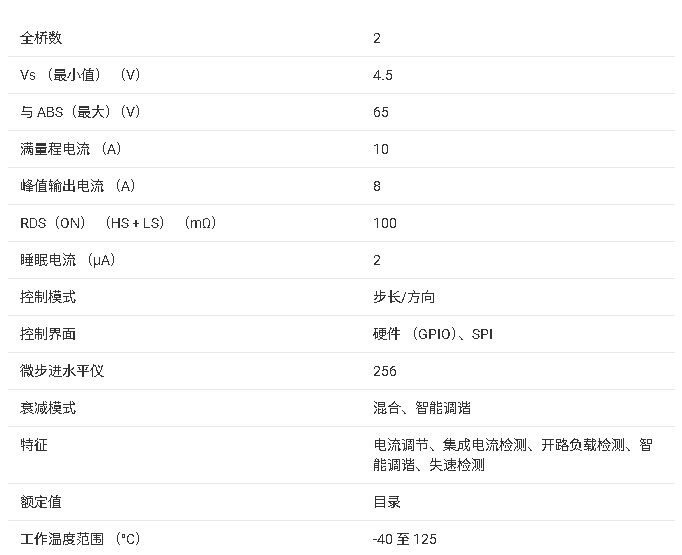
該DRV8421為家用電器和其他機(jī)電一體化應(yīng)用提供雙 H 橋電機(jī)驅(qū)動(dòng)器。該器件可用于驅(qū)動(dòng)一個(gè)或兩個(gè)直流電機(jī)、一個(gè)雙極步進(jìn)電機(jī)或其他負(fù)載。簡(jiǎn)單的PWM接口可輕松連接控制器電路。
2025-10-11 15:15:021099 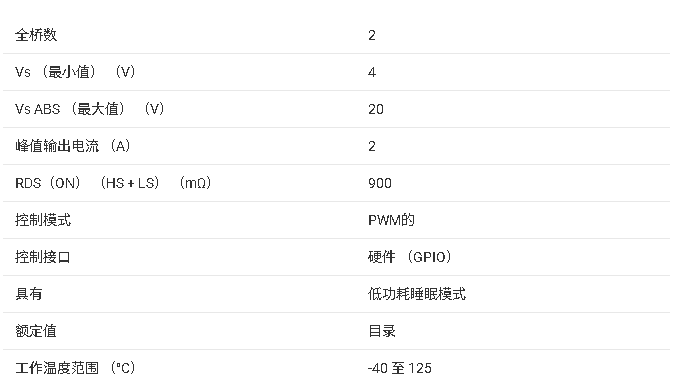
該DRV8818A為打印機(jī)、掃描儀和其他自動(dòng)化設(shè)備應(yīng)用提供集成步進(jìn)電機(jī)驅(qū)動(dòng)器。該器件具有兩個(gè)H橋驅(qū)動(dòng)器和微步進(jìn)索引器邏輯,用于控制步進(jìn)電機(jī)。
每個(gè)模塊的輸出驅(qū)動(dòng)器模塊由配置為全H橋的N溝道功率MOSFET組成,以驅(qū)動(dòng)電機(jī)繞組。
2025-10-11 09:29:02666 
本文對(duì)TMC2208與TMC2209步進(jìn)電機(jī)驅(qū)動(dòng)器對(duì)比分析,對(duì)比了兩款步進(jìn)電機(jī)驅(qū)動(dòng)器的性能特點(diǎn)和應(yīng)用差異等。兩者均采用TRINAMIC技術(shù),支持1/256微步進(jìn)和StealthChop V2靜音驅(qū)動(dòng)
2025-10-09 17:19:521267 
電壓 :范圍寬,從? 10V 至 44V 。這使得它可以輕松驅(qū)動(dòng)額定電壓較高的步進(jìn)電機(jī),獲得更高的轉(zhuǎn)速和扭矩。 高級(jí)細(xì)分控制 : 內(nèi)置? 2相步進(jìn)電機(jī)脈沖控制器 。 支持豐富的細(xì)分設(shè)置,通過(guò)? CLK
2025-09-19 14:20:59528 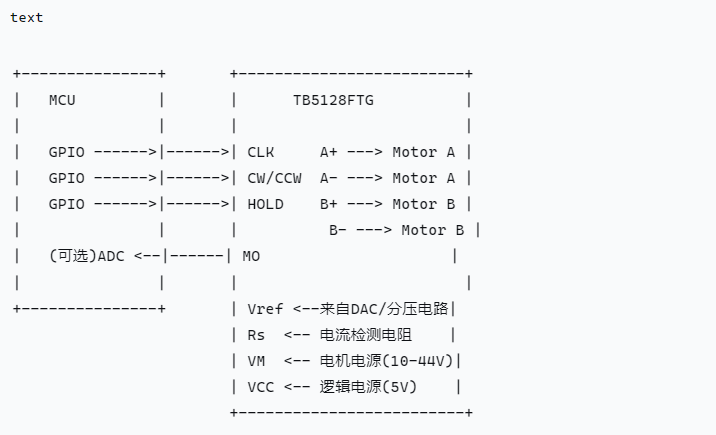
深圳南柯電子|步進(jìn)電機(jī)EMC整改:驅(qū)動(dòng)器與電纜整改的極速排查法
2025-09-17 09:55:52462 深圳南柯電子|步進(jìn)電機(jī)EMC整改:不過(guò)關(guān)?常見(jiàn)誤區(qū)你可能正在犯
2025-09-08 09:58:26500 前言在現(xiàn)代工業(yè)自動(dòng)化和消費(fèi)電子領(lǐng)域,步進(jìn)電機(jī)作為精確定位和運(yùn)動(dòng)控制的關(guān)鍵執(zhí)行元件,其性能要求日益提高。傳統(tǒng)步進(jìn)電機(jī)驅(qū)動(dòng)器面臨著噪音大、振動(dòng)強(qiáng)、能效低和集成度不高等痛點(diǎn)。特別是在辦公設(shè)備、醫(yī)療儀器
2025-09-01 14:01:10709 
精密儀器控制領(lǐng)域,步進(jìn)電機(jī)因其結(jié)構(gòu)簡(jiǎn)單、控制方便、成本低廉等優(yōu)勢(shì)被廣泛應(yīng)用。然而,傳統(tǒng)開(kāi)環(huán)控制的步進(jìn)電機(jī)存在失步、振動(dòng)、噪聲等問(wèn)題,難以滿(mǎn)足高精度應(yīng)用場(chǎng)景的需求。閉環(huán)控制技術(shù)的引入為步進(jìn)電機(jī)性能提升
2025-08-29 17:22:081053 Texas Instruments DRV8461步進(jìn)電機(jī)驅(qū)動(dòng)器是寬電壓、高功率、高性能步進(jìn)電機(jī)驅(qū)動(dòng)器。這些驅(qū)動(dòng)器支持高達(dá)65V的電源電壓,并且具有300mΩ HS + LS導(dǎo)通電阻集成MOSFET,允許高達(dá)3A的電流。
2025-08-29 14:32:09837 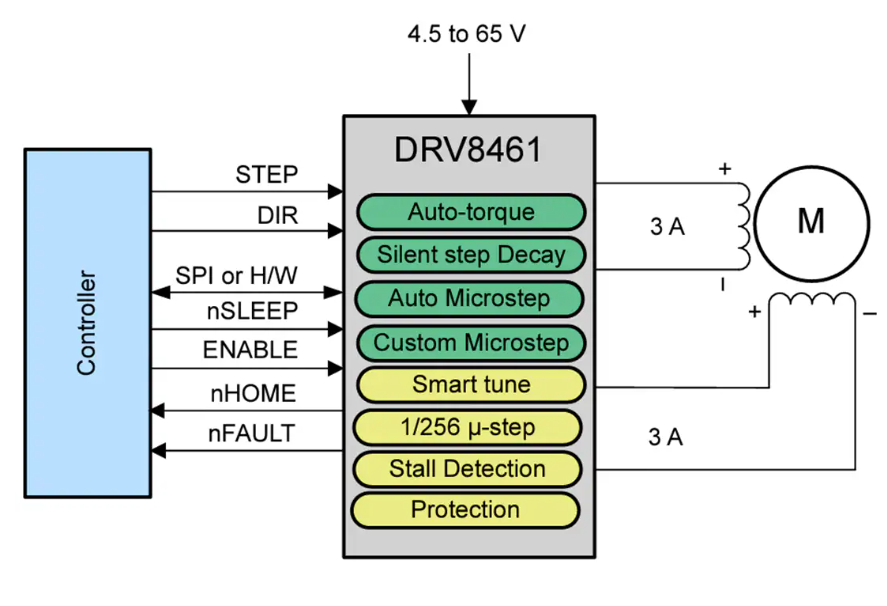
基于MT6835磁編碼器IC的步進(jìn)電機(jī)全閉環(huán)伺服控制策略,通過(guò)引入高精度位置反饋和先進(jìn)控制算法,實(shí)現(xiàn)步進(jìn)電機(jī)性能的顯著提升。
2025-08-27 17:55:08843 Texas Instruments DRV8849EVM步進(jìn)電機(jī)驅(qū)動(dòng)器評(píng)估模塊(EVM)設(shè)計(jì)用于評(píng)估DRV8849。DRV8849是一款適用于工業(yè)和消費(fèi)類(lèi)應(yīng)用的雙路步進(jìn)電機(jī)驅(qū)動(dòng)器。該器件與四個(gè)N溝道
2025-08-22 10:47:46715 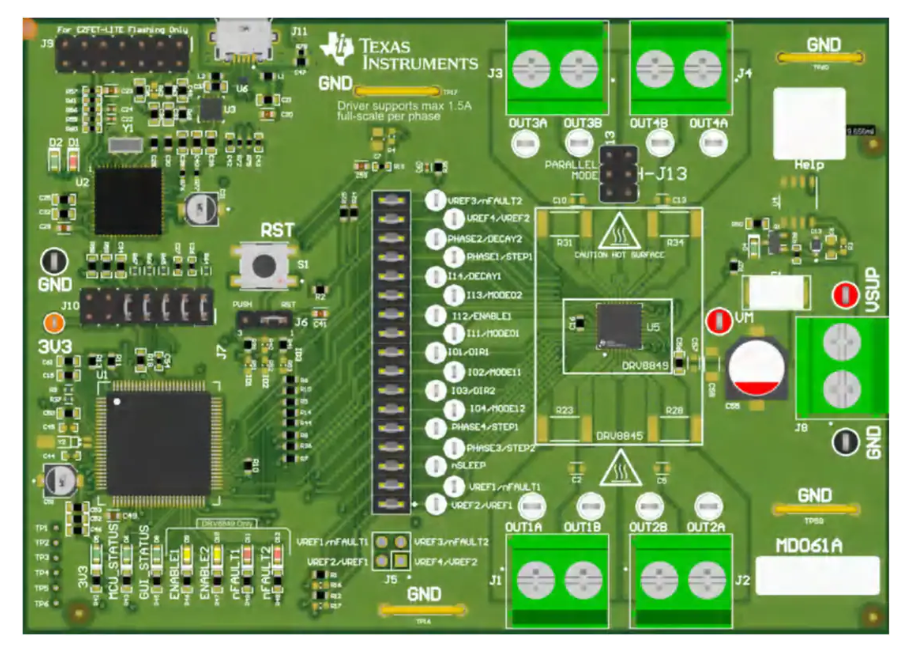
步進(jìn)電機(jī)作為一種將電脈沖信號(hào)轉(zhuǎn)換為角位移或線位移的執(zhí)行元件,在自動(dòng)化控制領(lǐng)域扮演著重要角色。其運(yùn)動(dòng)電流(又稱(chēng)運(yùn)行電流)與保持電流(又稱(chēng)靜止電流)的合理設(shè)置,直接影響電機(jī)的性能表現(xiàn)、能耗水平及系統(tǒng)
2025-08-22 07:42:59999 
在工業(yè)自動(dòng)化和精密控制領(lǐng)域,步進(jìn)電機(jī)因其開(kāi)環(huán)控制簡(jiǎn)單、成本低廉等優(yōu)勢(shì)被廣泛應(yīng)用,但其固有的失步、振動(dòng)和噪音問(wèn)題始終困擾著工程師。隨著高精度應(yīng)用場(chǎng)景的不斷涌現(xiàn),傳統(tǒng)步進(jìn)電機(jī)的性能瓶頸日益凸顯。而麥歌恩
2025-08-12 17:26:35838 在工業(yè)自動(dòng)化、智能設(shè)備等領(lǐng)域不斷發(fā)展的當(dāng)下,閉環(huán)步進(jìn)電機(jī)控制系統(tǒng)憑借其精準(zhǔn)的控制性能和穩(wěn)定的運(yùn)行狀態(tài),正發(fā)揮著越來(lái)越重要的作用。而MT6835磁編芯片的出現(xiàn),為閉環(huán)步進(jìn)電機(jī)控制系統(tǒng)帶來(lái)了全新的發(fā)展契機(jī),助力其進(jìn)入一個(gè)嶄新時(shí)代。
2025-07-24 17:02:02515 步進(jìn)電機(jī)作為一種將電脈沖信號(hào)轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu),其運(yùn)轉(zhuǎn)依賴(lài)于脈沖信號(hào)的控制,而單片機(jī)作為控制核心,通過(guò)輸出特定的脈沖信號(hào)和方向信號(hào),實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的步數(shù)、方向、轉(zhuǎn)速的精準(zhǔn)控制,整個(gè)過(guò)程需結(jié)合驅(qū)動(dòng)
2025-07-24 13:41:35486 在精密運(yùn)動(dòng)控制領(lǐng)域,永磁直流電機(jī)因其優(yōu)于交流電機(jī)的可控性,被廣泛應(yīng)用于需精準(zhǔn)調(diào)節(jié)速度、扭矩或位置的場(chǎng)景。美蓓亞三美有刷直流電機(jī)當(dāng)前主流直流電機(jī)分為有刷電機(jī)與無(wú)刷電機(jī)(BLDC)兩大技術(shù)路線——前者
2025-07-16 10:15:043223 
摘 要:針對(duì)步進(jìn)電機(jī)內(nèi)部運(yùn)行溫度超過(guò)大約130℃將出現(xiàn)退,從而導(dǎo)致輸出力矩下降乃至失步這一問(wèn)題,結(jié)合無(wú)線傳感器網(wǎng)絡(luò),采用了性能可靠,經(jīng)過(guò)改進(jìn)算法的定向擴(kuò)散路由協(xié)議,設(shè)計(jì)了新型的步進(jìn)電機(jī)
2025-07-10 16:59:00
6軸步進(jìn)電機(jī)驅(qū)動(dòng)+STM32F767+485+CAN+網(wǎng)口+12路輸入輸出 原理圖?步進(jìn)電機(jī)驅(qū)動(dòng)方案TMC5160
2025-06-27 16:18:33 0
0 Analog Devices Inc. TMCM-3216步進(jìn)電機(jī)控制器/驅(qū)動(dòng)器模塊是緊湊型3軸雙極步進(jìn)電機(jī)控制器和獨(dú)立驅(qū)動(dòng)器板。Analog Devices Inc. TMCM-3216板支持多達(dá)
2025-06-23 14:44:541241 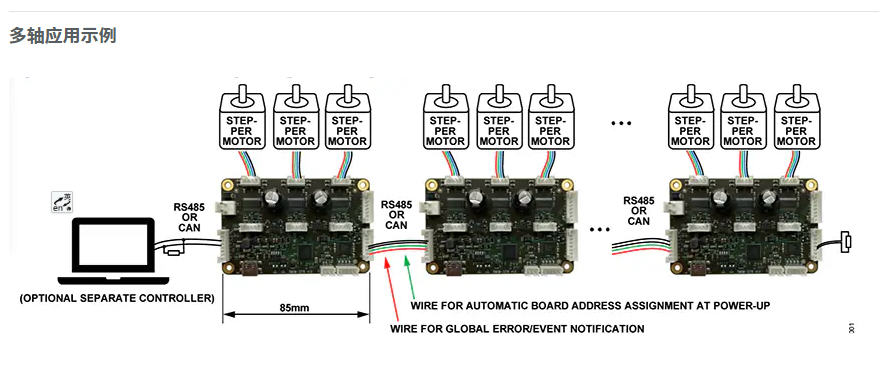
對(duì)同步電動(dòng)機(jī)采用步進(jìn)控制,模擬仿真該動(dòng)態(tài)下電機(jī)各種參數(shù)對(duì)性能的影響,同時(shí)提出如何選取初值和確定合適的參數(shù)。
純分享帖,需要者可點(diǎn)擊附件免費(fèi)獲取完整資料~~~*附件:同步電機(jī)步進(jìn)運(yùn)動(dòng)性能分析.pdf【免責(zé)
2025-06-20 17:38:59
強(qiáng)的
價(jià)格方面不同
步進(jìn)電機(jī)一個(gè)最大的優(yōu)點(diǎn)就是便宜;伺服電機(jī)的價(jià)格普遍是步進(jìn)電機(jī)的幾十倍
總結(jié):交流伺服系統(tǒng)在許多性能方面都優(yōu)于步進(jìn)電機(jī)但是控制也會(huì)更加復(fù)雜,如果我們對(duì)電機(jī)的需求是操作簡(jiǎn)單、價(jià)格便宜、可以開(kāi)環(huán)控制、距離誤差小在一些要求不高的場(chǎng)合可以選用步進(jìn)電機(jī)。
2025-06-18 13:27:36
Adi Trinamic TMC5240x步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器IC配備了串行通信接口(SPI和UART)和廣泛的診斷能力。這些智能高性能IC將靈活的斜坡優(yōu)化斜坡發(fā)生器與步進(jìn)電機(jī)驅(qū)動(dòng)器結(jié)合在一起。該
2025-06-16 10:33:01928 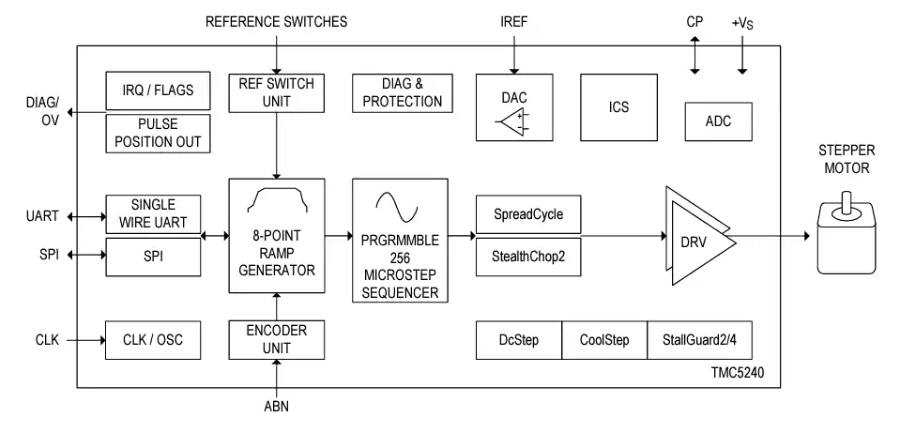
ADI Trinamic TMC5271步進(jìn)電機(jī)控制器是一款 高性能、單軸步進(jìn)控制器和驅(qū)動(dòng)器IC,具有串行通信接口(SPI和UART)。該電機(jī)控制器的直流電壓范圍為2.1V至20V。TMC5271
2025-06-14 09:29:26845 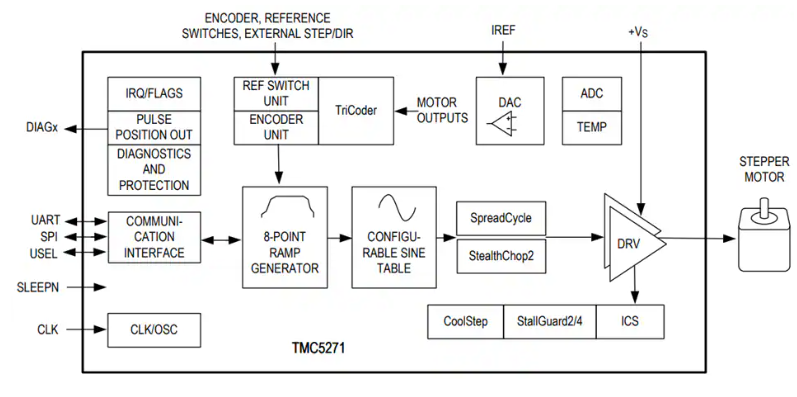
摘 要:基于單片微處理器對(duì)三相反應(yīng)式步進(jìn)電機(jī)的轉(zhuǎn)速與轉(zhuǎn)向控制系統(tǒng)進(jìn)行研究設(shè)計(jì)。步進(jìn)電機(jī)每給一個(gè)脈沖就轉(zhuǎn)動(dòng)一個(gè)固定的角度,通過(guò)控制步進(jìn)電機(jī)的脈沖頻率和延時(shí)策略,從而改變步進(jìn)角,實(shí)現(xiàn)步進(jìn)電機(jī)的調(diào)速。該
2025-06-13 09:31:29
這些指令主要是針對(duì)用 PLC 直接聯(lián)動(dòng)伺服放大器,目的是可以不借助其他擴(kuò)展設(shè)備(例如1GM 模塊)來(lái)進(jìn)行簡(jiǎn)單的點(diǎn)位控制, 使用這些指令時(shí)最好配合三菱的伺服放大器 (如 MR-J2)。然而,我們也可以用這些指令來(lái)控制步進(jìn)電機(jī)的運(yùn)行,下面我們來(lái)了解相關(guān)指令的用法。
2025-06-12 10:33:511721 
步進(jìn)電機(jī)高速運(yùn)行時(shí),反電動(dòng)勢(shì)幅值增大、頻率升高,導(dǎo)致電流建立延遲、扭矩下降及動(dòng)態(tài)響應(yīng)滯后。所以在步進(jìn)電機(jī)高速運(yùn)行的方案中,我們需要通過(guò)優(yōu)化電機(jī)選型(如低電感、適中極數(shù))、升壓驅(qū)動(dòng)及BEMF反饋控制,可緩解高速性能衰減,避免PWM飽和導(dǎo)致的扭矩崩潰。
2025-06-10 16:06:401386 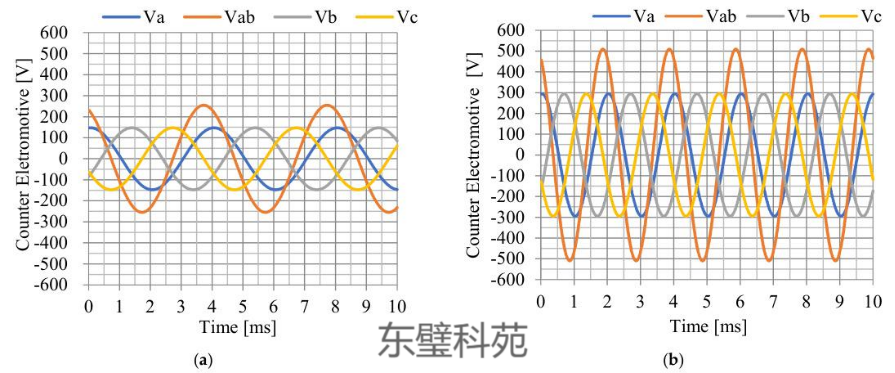
步進(jìn)電機(jī)作為一種將電脈沖信號(hào)轉(zhuǎn)換為角位移的執(zhí)行元件,在工業(yè)控制、自動(dòng)化設(shè)備、3D打印等領(lǐng)域廣泛應(yīng)用。其運(yùn)行性能受多種因素影響,其中細(xì)分驅(qū)動(dòng)技術(shù)和抗干擾能力是工程師特別關(guān)注的兩個(gè)核心問(wèn)題。本文將
2025-06-07 17:42:42820 
脈沖信號(hào)轉(zhuǎn)換為機(jī)械角位移和線性位移的電機(jī),采用高性能永磁體后制成永磁混合式步進(jìn)電動(dòng)機(jī),并采用先進(jìn)的控制技術(shù),其技術(shù)指標(biāo)和動(dòng)態(tài)特性有明顯的改進(jìn)和提高。開(kāi)關(guān)磁阻電機(jī)是一種機(jī)電一體化的新型電機(jī),在電機(jī)發(fā)明之后
2025-06-06 14:07:12
Analog Devices Inc.的TMC2210步進(jìn)電機(jī)驅(qū)動(dòng)器IC通過(guò)封裝引腳和附加診斷輸出提供配置選項(xiàng)。TMC2210集成了基于256微步進(jìn)內(nèi)置索引器的高級(jí)步進(jìn)電機(jī)驅(qū)動(dòng)器和兩個(gè)完全集成的36V、3.0A(最大值)半橋以及非耗散集成電流檢測(cè)(IC)。
2025-06-04 10:42:23913 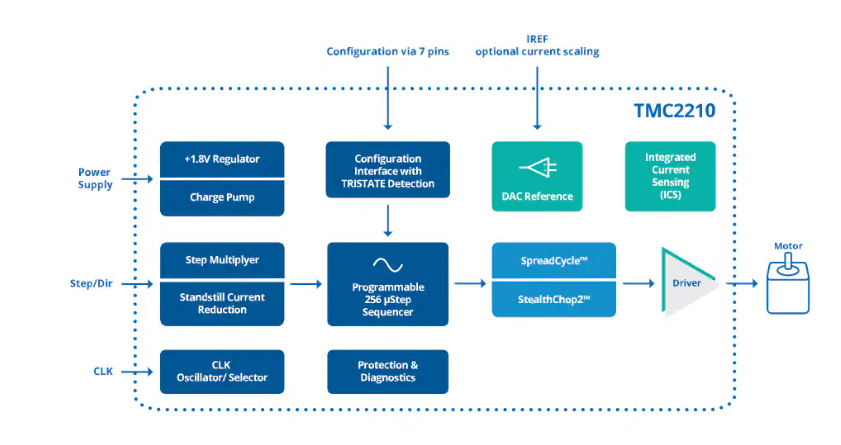
介紹了BYG通用系列二相步進(jìn)電機(jī)最常采用的的單極性和雙極性2種驅(qū)動(dòng)電路的設(shè)計(jì)方案,從原理上體現(xiàn)了一相步進(jìn)電機(jī)的控制方法,增加了步進(jìn)電機(jī)驅(qū)動(dòng)電路設(shè)計(jì)的靈活性。二相步進(jìn)電機(jī)的單極性和雙極性2種驅(qū)動(dòng)
2025-05-28 15:38:41
本文介紹了步進(jìn)電機(jī)的工作原理,以及如何使用數(shù)據(jù)采集卡控制步進(jìn)電機(jī)動(dòng)作。
2025-05-26 15:53:151185 
一種用于步進(jìn)電機(jī)加速度的新算法可以實(shí)現(xiàn)速度曲線的實(shí)時(shí)參數(shù)化和計(jì)算。該算法可以在低端微控制器上運(yùn)行,只使用簡(jiǎn)單的定點(diǎn)算術(shù)運(yùn)算并且不使用數(shù)據(jù)表。它以恒定的加速度和減速度形成線性斜坡時(shí)間的準(zhǔn)確近似值
2025-05-14 15:09:45
伺服電機(jī)作為工業(yè)自動(dòng)化領(lǐng)域的核心部件,其運(yùn)行狀態(tài)直接影響設(shè)備效率和生產(chǎn)線穩(wěn)定性。判斷伺服電機(jī)是否損壞需要結(jié)合多維度檢測(cè)方法,從基礎(chǔ)觀察、性能測(cè)試到專(zhuān)業(yè)診斷層層遞進(jìn)。以下為系統(tǒng)性判斷流程及實(shí)操要點(diǎn)
2025-05-12 17:21:203512 
步進(jìn)電機(jī)的發(fā)熱問(wèn)題是一個(gè)需要關(guān)注的重要方面,發(fā)熱不僅影響電機(jī)的效率,還可能對(duì)電機(jī)的壽命和性能產(chǎn)生負(fù)面影響。為了減少步進(jìn)電機(jī)的發(fā)熱,可以從以下幾個(gè)方面著手。 1. 選擇合適的電機(jī): ● 在選型時(shí),盡量
2025-05-11 17:51:50834 步進(jìn)電機(jī)的干擾問(wèn)題是一個(gè)復(fù)雜且常見(jiàn)的話(huà)題,這些干擾可能來(lái)源于步進(jìn)電機(jī)本身,也可能來(lái)自外部環(huán)境。為了有效地應(yīng)對(duì)這些干擾,可以從以下幾個(gè)方面進(jìn)行考慮和解決。 一、步進(jìn)電機(jī)對(duì)外部的干擾及其應(yīng)對(duì)措施 步進(jìn)
2025-05-11 17:38:191035 
HJ4205是一款步進(jìn)電機(jī)驅(qū)動(dòng)電路。包含一個(gè)步進(jìn)電機(jī)控制器和內(nèi)部N溝道MOSFET,來(lái)驅(qū)動(dòng)一個(gè)雙極步進(jìn)電機(jī)或兩個(gè)刷式直流電機(jī)。HJ4205支持全步進(jìn)到1/256步進(jìn)驅(qū)動(dòng)模式。通過(guò)使用自適應(yīng)消隱時(shí)間和包括自動(dòng)混合衰減模式在內(nèi)的多種不同的電流衰減模式,可實(shí)現(xiàn)非常平滑的運(yùn)動(dòng)過(guò)程。
2025-05-07 16:19:561571 
本文介紹了 RP2350 開(kāi)發(fā)板使用 LabVIEW 上位機(jī)串口發(fā)送指令,實(shí)現(xiàn)步進(jìn)電機(jī) **單步** 和 **連續(xù)** 旋轉(zhuǎn)指定角度的項(xiàng)目設(shè)計(jì)。進(jìn)一步結(jié)合具體的應(yīng)用場(chǎng)景,設(shè)計(jì)了開(kāi)發(fā)板與儀器的聯(lián)合調(diào)用、進(jìn)而實(shí)現(xiàn)數(shù)據(jù)自動(dòng)采集的應(yīng)用案例。結(jié)合其他應(yīng)用場(chǎng)景,有針對(duì)性地提出了工程設(shè)計(jì)思路與解決方案。
2025-05-05 16:58:44953 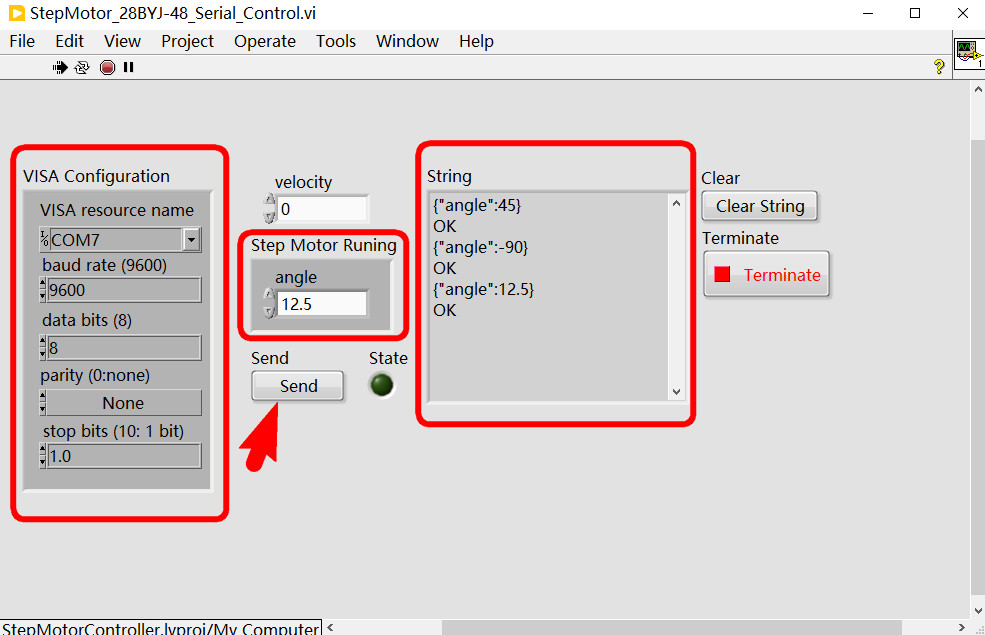
強(qiáng)勁性能。
其摩擦轉(zhuǎn)矩范圍為600到1200 gf.cm,而拉入轉(zhuǎn)矩為300 gf.cm。
參數(shù)
值/描述
電機(jī)類(lèi)型
單極 4 相永磁式步進(jìn)電機(jī)(5線制)
步距角
5.625°(64 步/圈),配合減速
2025-05-03 15:11:44
一、前言
步進(jìn)電機(jī)驅(qū)動(dòng)器是一種用于控制步進(jìn)電機(jī)運(yùn)動(dòng)的裝置,它是將控制信號(hào)轉(zhuǎn)換成步進(jìn)電機(jī)可以識(shí)別的控制電壓或電流的電路。它在工業(yè)自動(dòng)化領(lǐng)域有著廣泛的應(yīng)用,如機(jī)器人、印刷機(jī)、木工機(jī)床、噴繪機(jī)等。步進(jìn)電機(jī)驅(qū)動(dòng)器的組成結(jié)構(gòu)主要由以下部分:
2025-04-27 17:52:52695 
剎車(chē)步進(jìn)電機(jī)作為一種結(jié)合了步進(jìn)電機(jī)精確控制與制動(dòng)功能的特種電機(jī),其獨(dú)特的設(shè)計(jì)和工作原理使其在需要快速啟停、精確定位的場(chǎng)景中展現(xiàn)出不可替代的優(yōu)勢(shì)。以下從技術(shù)原理、性能特點(diǎn)、應(yīng)用場(chǎng)景及發(fā)展趨勢(shì)等方面展開(kāi)
2025-04-25 15:34:091196 
檢測(cè)電機(jī)的好壞可以通過(guò)多種方法綜合判斷,以下是一些常用的檢測(cè)方法: ? 一、外觀檢查 首先,通過(guò)觀察電機(jī)的外觀,可以初步判斷其是否存在明顯的問(wèn)題。檢查電機(jī)外殼是否有裂縫、變形、銹蝕等現(xiàn)象,電線是否
2025-04-23 17:23:055628 步進(jìn)電機(jī)過(guò)載時(shí),可以采取以下措施進(jìn)行處理: 一、降低電機(jī)負(fù)載 1. 減少負(fù)載:通過(guò)增加傳動(dòng)比例、優(yōu)化機(jī)械設(shè)計(jì)等方式來(lái)減輕步進(jìn)電機(jī)的負(fù)載,確保其在額定負(fù)載范圍內(nèi)運(yùn)行。 2. 檢查機(jī)械部件:定期檢查步進(jìn)
2025-04-21 07:41:251161 基于51/32單片機(jī)按鍵控制步進(jìn)電機(jī)正反轉(zhuǎn),A4988驅(qū)動(dòng)
2025-04-14 15:05:177 步進(jìn)電機(jī)選型時(shí),必須要了解以下幾個(gè)方面的信息以確保所選電機(jī)能夠滿(mǎn)足特定的應(yīng)用需求: 1. 轉(zhuǎn)矩需求: ? ?● 步進(jìn)電機(jī)的保持轉(zhuǎn)矩類(lèi)似于傳統(tǒng)電機(jī)的“功率”,但物理結(jié)構(gòu)和輸出特性有所不同
2025-04-14 07:38:161015 、信號(hào)輸入和輸出工作失常,同時(shí)也可能使步進(jìn)電機(jī)產(chǎn)生震動(dòng)和運(yùn)行失步。以下是對(duì)變頻器干擾PLC和步進(jìn)電機(jī)的主要原因及解決辦法的詳細(xì)分析: 一、主要原因 1. 變頻器性能:性能較差的變頻器可能產(chǎn)生更大的干擾。 2. 諧波干擾:變頻器在整流
2025-04-10 07:34:301366 
一、概述步進(jìn)電機(jī)是一種數(shù)字控制電動(dòng)機(jī),其接受控制脈沖信號(hào)并相應(yīng)的轉(zhuǎn)動(dòng)一定的角度。實(shí)際運(yùn)用中步進(jìn) 電機(jī)與控制器是不可分割的整體,通過(guò)單片機(jī)、DSP 等微控制器產(chǎn)生的控制脈沖信號(hào)是弱電信號(hào),需要 經(jīng)過(guò)
2025-04-09 13:33:151 步進(jìn)電機(jī)因其精準(zhǔn)的位置控制和易于驅(qū)動(dòng)的特性,廣泛應(yīng)用于打印機(jī)、CNC機(jī)床、機(jī)器人等領(lǐng)域。無(wú)論您是初學(xué)者還是有一定經(jīng)驗(yàn)的工程師,這個(gè)系列都將為您提供有價(jià)值的知識(shí)和實(shí)踐指導(dǎo)。
2025-03-31 09:45:221432 
雙相四線(或者六線)的步進(jìn)電機(jī)。也就是 說(shuō),我們制作一個(gè)可以單獨(dú)控制怠速步進(jìn)電機(jī)的裝 置,利用雙相四線四拍控制時(shí)序來(lái)驅(qū)動(dòng)怠速步進(jìn)電 機(jī),迅速判斷怠速步進(jìn)電機(jī)的好壞,評(píng)估怠速步進(jìn) 電機(jī)的性能。因此
2025-03-21 13:32:29
步進(jìn)電機(jī)作為位置控制的執(zhí)行元件在汽車(chē)電子系統(tǒng)中被廣泛應(yīng)用。納芯微公司針對(duì)汽車(chē)上的步進(jìn)電機(jī)應(yīng)用推出雙極性步進(jìn)電機(jī)驅(qū)動(dòng)芯片-NSD8389 ,可以幫助客戶(hù)快速可靠地進(jìn)行步進(jìn)電機(jī)控制。
2025-03-17 14:00:282821 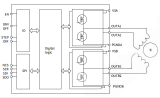
直線電機(jī)與旋轉(zhuǎn)電機(jī)作為現(xiàn)代工業(yè)驅(qū)動(dòng)系統(tǒng)的兩大核心組件,各自擁有獨(dú)特的性能特點(diǎn)和適用場(chǎng)景。本文將從速度、加速度、精度、動(dòng)態(tài)響應(yīng)、結(jié)構(gòu)及應(yīng)用領(lǐng)域等多個(gè)維度,對(duì)直線電機(jī)與旋轉(zhuǎn)電機(jī)進(jìn)行全面而深入的性能
2025-03-16 16:55:411683 步進(jìn)電機(jī)由于驅(qū)動(dòng)簡(jiǎn)單、高效實(shí)用,常作為機(jī)床或生產(chǎn)線的輔助設(shè)備,在工業(yè)自動(dòng)化生產(chǎn)中發(fā)揮著重要的作用。工業(yè)領(lǐng)域中多步進(jìn)電機(jī)協(xié)同控制運(yùn)用廣泛,需要運(yùn)用多步進(jìn)電機(jī)控制生產(chǎn)高精度產(chǎn)品的場(chǎng)景也越來(lái)越多,如精密
2025-03-06 11:03:031003 
從步進(jìn)電機(jī)到智能系統(tǒng),編碼器的選擇是一個(gè)關(guān)鍵決策,它直接影響到系統(tǒng)的性能和精度。以下是一些關(guān)于如何選擇編碼器的建議: 一、明確應(yīng)用場(chǎng)景和需求 首先,需要明確編碼器的應(yīng)用場(chǎng)景和需求。不同的應(yīng)用領(lǐng)域
2025-03-05 07:34:401051 
一種用于步進(jìn)電機(jī)加速度的新算法可以實(shí)現(xiàn)速度曲線的實(shí)時(shí)參數(shù)化和計(jì)算。該算法可以在低端微控制器上運(yùn)行,只使用簡(jiǎn)單的定點(diǎn)算術(shù)運(yùn)算并且不使用數(shù)據(jù)表。它以恒定的加速度和減速度形成線性斜坡時(shí)間的準(zhǔn)確近似值
2025-03-04 21:17:04
行星減速機(jī)在減速步進(jìn)電機(jī)中扮演著至關(guān)重要的角色。其主要作用是通過(guò)使用行星齒輪組來(lái)減小輸出轉(zhuǎn)速并增大輸出扭矩。這種設(shè)計(jì)使得步進(jìn)電機(jī)能夠在運(yùn)行時(shí)穩(wěn)定地輸出所需的扭矩,從而更好地滿(mǎn)足各種應(yīng)用的需求
2025-03-03 11:31:411028 
電機(jī)轉(zhuǎn)速控制電路(PWM信號(hào))主要采用 L298N ,通過(guò)單片機(jī)的 I/O 輸入改變芯片控制端的電平,即可以對(duì)電機(jī) 進(jìn)行正反轉(zhuǎn),停止的操作,輸入引腳與輸出引腳的邏輯關(guān)系圖為驅(qū)動(dòng)直流電機(jī)和步進(jìn)電機(jī)的詳細(xì)資料可下載PDF文檔![hide]
[/hide]
2025-02-26 16:02:15
步進(jìn)電機(jī)作為一種能將數(shù)字輸入脈沖轉(zhuǎn)換成旋轉(zhuǎn)或直線增量運(yùn)動(dòng)的電磁執(zhí)行元件,在自動(dòng)化控制領(lǐng)域具有廣泛應(yīng)用。步進(jìn)電機(jī)的接線方法因線數(shù)的不同而有所差異,以下是4線、6線、8線步進(jìn)電機(jī)的接線方法詳解,幫助讀者
2025-02-26 09:08:5212576 
步進(jìn)電機(jī)依靠控制電脈沖信號(hào)的頻率和數(shù)量來(lái)調(diào)控轉(zhuǎn)動(dòng)的步數(shù)與速度,具備分步控制的特性。為了讓步進(jìn)電機(jī)的控制更加順滑,微步控制技術(shù)應(yīng)運(yùn)而生。以下是微步控制的優(yōu)勢(shì)與挑戰(zhàn)的詳細(xì)揭秘: 一、微步控制的優(yōu)勢(shì) 1.
2025-02-25 07:33:571103 
空心軸步進(jìn)電機(jī)是一種特殊設(shè)計(jì)的步進(jìn)電機(jī),其核心特點(diǎn)在于擁有一個(gè)或多個(gè)空心軸,這些軸不僅允許電機(jī)的其他部件通過(guò),還可以根據(jù)需要集成額外的功能,如散熱、連接其他設(shè)備等。
2025-02-24 14:47:071047 
電子發(fā)燒友網(wǎng)綜合報(bào)道,電機(jī)控制和驅(qū)動(dòng)的分類(lèi)方式多種多樣,若按電機(jī)類(lèi)型劃分,可分為直流電機(jī)驅(qū)動(dòng)、交流電機(jī)驅(qū)動(dòng)和步進(jìn)電機(jī)驅(qū)動(dòng)。步進(jìn)電機(jī)依靠控制電脈沖信號(hào)的頻率和數(shù)量,來(lái)調(diào)控轉(zhuǎn)動(dòng)的步數(shù)與速度,具備分步控制
2025-02-19 00:47:002500 電機(jī)驅(qū)動(dòng)芯片 - SS8833E是一種雙橋電機(jī)驅(qū)動(dòng)器,具有兩個(gè)H橋驅(qū)動(dòng)器,可以驅(qū)動(dòng)兩個(gè)直流有刷電機(jī)、一個(gè)雙極步進(jìn)電機(jī)、電磁閥或其他電感負(fù)載。
2025-02-12 09:43:101038 
MD400系列電調(diào)是針對(duì)步進(jìn)電機(jī)的專(zhuān)用驅(qū)動(dòng)方案,自帶磁編碼器芯片,采用FOC方式驅(qū)動(dòng)步進(jìn)電機(jī),支持欠壓、過(guò)壓、過(guò)流和堵轉(zhuǎn)保護(hù)等功能,支持UART、RS-485、CAN通信控制和脈沖方式控制,支持標(biāo)準(zhǔn)
2025-01-23 14:13:57878 
的電機(jī)類(lèi)型包括直流電機(jī)、步進(jìn)電機(jī)和伺服電機(jī)。每種電機(jī)都有其特定的應(yīng)用場(chǎng)景和控制要求。 1.1 電機(jī)類(lèi)型 直流電機(jī) :適用于需要連續(xù)速度控制的應(yīng)用。 步進(jìn)電機(jī) :適用于需要精確位置控制的應(yīng)用。 伺服電機(jī) :適用于需要高精度速度和位
2025-01-22 09:37:161462 在現(xiàn)代工業(yè)和自動(dòng)化領(lǐng)域,電機(jī)控制器扮演著至關(guān)重要的角色。它們不僅控制電機(jī)的運(yùn)行,還直接影響到整個(gè)系統(tǒng)的能效和性能。因此,正確選型電機(jī)控制器對(duì)于確保設(shè)備的最佳運(yùn)行至關(guān)重要。 1. 確定電機(jī)類(lèi)型 在選型
2025-01-22 09:22:474064 ? ? ? 在選擇搬運(yùn)機(jī)械手的電機(jī)時(shí),需要考慮多個(gè)因素以確保電機(jī)的性能滿(mǎn)足機(jī)械手的運(yùn)行需求。以下是一個(gè)詳細(xì)的案例分析,說(shuō)明如何為搬運(yùn)機(jī)械手選擇合適的電機(jī)。 ? ? ? ? 一、電機(jī)類(lèi)型選擇
2025-01-21 16:44:451591 
? ? ? 步進(jìn)電機(jī),作為一種將電脈沖信號(hào)轉(zhuǎn)換為相應(yīng)角位移或線位移的電動(dòng)機(jī),是現(xiàn)代數(shù)字控制系統(tǒng)中不可或缺的重要組件。其工作原理基于電磁學(xué)原理,通過(guò)接收數(shù)字控制信號(hào)(電脈沖信號(hào))并轉(zhuǎn)化為機(jī)械位移,步進(jìn)
2025-01-21 16:43:462503 
微型步進(jìn)電機(jī)作為一種精密控制的電動(dòng)機(jī),在現(xiàn)代科技中扮演著至關(guān)重要的角色。它以高精度、可控性強(qiáng)、低成本等優(yōu)勢(shì),被廣泛應(yīng)用于各種自動(dòng)化設(shè)備和精密儀器中。從3D打印機(jī)、機(jī)器人,到醫(yī)療設(shè)備、消費(fèi)電子產(chǎn)品,微型步進(jìn)電機(jī)的身影無(wú)處不在,成為了現(xiàn)代技術(shù)發(fā)展的強(qiáng)大驅(qū)動(dòng)力。
2025-01-18 10:56:51900 一體式步進(jìn)電機(jī)是一種將步進(jìn)電機(jī)與驅(qū)動(dòng)器集成在一起的設(shè)備,旨在為用戶(hù)提供更為便捷的使用體驗(yàn)。這種設(shè)計(jì)不僅節(jié)省了空間,還提高了系統(tǒng)的整體性能和可靠性。一體式步進(jìn)電機(jī)廣泛應(yīng)用于多個(gè)領(lǐng)域,包括但不限于3C組裝測(cè)試、電子、醫(yī)療、環(huán)保、通訊和包裝等。
2025-01-13 16:27:53971 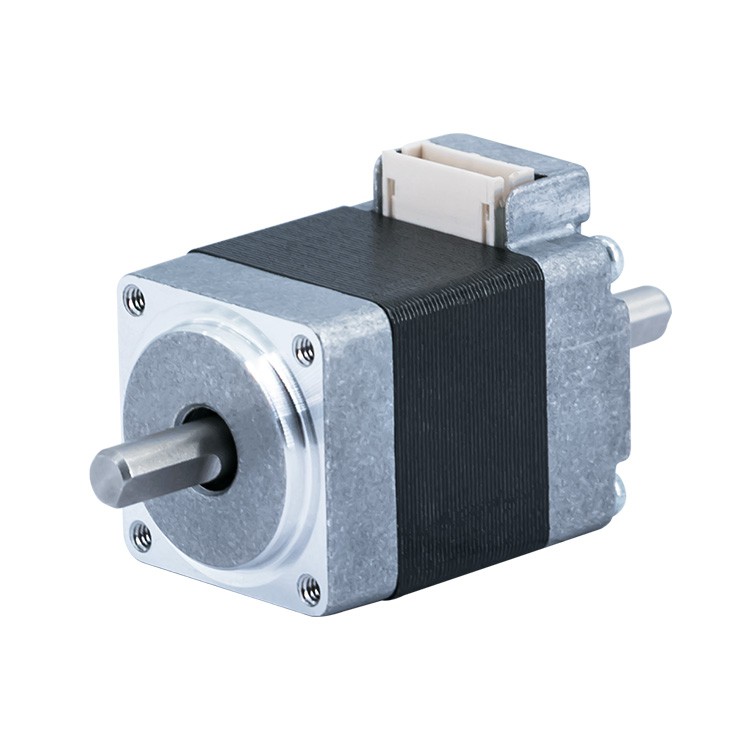
基于步進(jìn)電機(jī)的柴油機(jī)EGR系統(tǒng)開(kāi)發(fā)與試驗(yàn)研究
2025-01-09 15:01:270 中空軸步進(jìn)電機(jī)是一種特殊設(shè)計(jì)的步進(jìn)電機(jī),其核心工作原理基于電磁感應(yīng)定律。當(dāng)導(dǎo)線線圈中的電流發(fā)生變化時(shí),會(huì)在其周?chē)a(chǎn)生磁場(chǎng),這個(gè)磁場(chǎng)會(huì)對(duì)附近的線圈產(chǎn)生力,導(dǎo)致該線圈的運(yùn)動(dòng)。中空軸步進(jìn)電機(jī)由定子和轉(zhuǎn)子
2025-01-06 15:06:101677 
步進(jìn)電機(jī)驅(qū)動(dòng)器是控制步進(jìn)電機(jī)運(yùn)行的關(guān)鍵組件,根據(jù)不同的標(biāo)準(zhǔn),步進(jìn)電機(jī)驅(qū)動(dòng)器有多種分類(lèi)方式,以下是一些常見(jiàn)的分類(lèi)及選型: 一、步進(jìn)電機(jī)驅(qū)動(dòng)器的分類(lèi) 1. 線性驅(qū)動(dòng)器:以其簡(jiǎn)潔直接的驅(qū)動(dòng)方式著稱(chēng),通常
2025-01-06 08:08:561700 
 電子發(fā)燒友App
電子發(fā)燒友App














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論