 常用兩相步進電機和驅動器參數
常用兩相步進電機和驅動器參數

兩相步進電機及其驅動器是工業自動化領域的關鍵組件,其性能參數直接影響設備的定位精度和動態響應。以下從電機本體參數、驅動器核心技術及選型要點三個維度展開分析:
一、電機本體核心參數解析
1. 相數與步距角
標準兩相電機采用1.8°步距角設計,每轉需200個脈沖。部分高精度型號通過微步驅動可實現0.036°細分步距(如86系列電機的50細分模式)。相電流通常標注為額定值(如2A/相)和峰值(3A/相),實際工作時需匹配驅動器輸出能力。
2. 轉矩特性曲線
保持轉矩(Holding Torque)是選型關鍵指標,常見電機為0.4N·m,有的可達1.2N·m。需注意動態轉矩會隨轉速升高而衰減,如某42電機在300rpm時轉矩下降約35%。轉動慣量參數影響啟停特性,精密設備建議選擇低于80g·cm2的型號。
繞組電阻直接影響發熱量,典型值在1-5Ω范圍。絕緣等級多為B級(130℃),防護等級IP54適用于普通工業環境。機械精度包含軸向/徑向跳動(通常<0.02mm)和齒輪箱背隙(行星齒輪箱可做到<1弧分)。
二、驅動器關鍵技術參數
1. 電流控制方式
恒流斬波技術是主流方案,如有的驅動器支持0.5-5.6A可調輸出。微步分辨率常見1/2至1/256細分,高細分模式可顯著降低振動(如1/32細分時振動降低70%以上)。
2. 接口與保護功能
脈沖輸入支持5-24V電平兼容,最高響應頻率可達500kHz。過流保護閾值通常設定在額定電流的150%,過熱保護點多為75℃。部分高端型號集成RS485總線接口。
3. 動態性能優化
S曲線加速算法可使定位時間縮短20%,自動半流功能可降低待機功耗60%。某實驗數據顯示,帶負載慣量補償的驅動器可使系統響應速度提升40%。
三、系統匹配選型要點
1. 轉矩余量計算
建議實際負載轉矩不超過電機額定值的70%,高速工況需預留50%余量。例如搬運3kg負載的機械臂,應選擇保持轉矩≥0.6N·m的電機。
2. 諧振抑制方案
當脈沖頻率接近電機固有頻率(通常在100-300Hz范圍)時,可通過設置中間細分值避開諧振點。實測表明1/10細分可使共振振幅降低90%。
3. 散熱管理規范
持續工作電流應不超過額定值的80%,安裝散熱片可使溫升降低15-20℃。封閉式機箱內需保證≥0.5m/s的空氣流速。
典型應用案例對比:
●焊接設備:選用CRT57HB76電機+CQ244M驅動器。
●CNC數控設備:配置86電機(CRT86HB118,8N·m)+CQ268M驅動器(5A輸出)。
●自動化分揀線:采用閉環步進系統(編碼器反饋),定位重復精度±0.05mm。
維護注意事項:
1. 每月檢查連接器接觸電阻(應<50mΩ)。
2. 每季度清理散熱器積塵(溫升可降低8-10℃)。
3. 避免在濕度>80%環境長期存儲。
4. 齒輪箱每2000小時補充潤滑脂。
隨著集成化技術發展,新一代智能驅動器已開始集成運動控制功能(如預置32組點位數據),用戶可通過Modbus協議直接調用運動參數,顯著簡化系統架構。在選擇具體型號時,建議實測電機溫升和振動頻譜,確保參數匹配實際工況需求。
-
兩相步進電機
+關注
關注
0文章
11瀏覽量
3247
發布評論請先 登錄
步進電機驅動器的作用介紹

DRV8886AT步進電機驅動器:特性、應用與設計要點
詳解德州儀器 DRV8426 步進電機驅動器
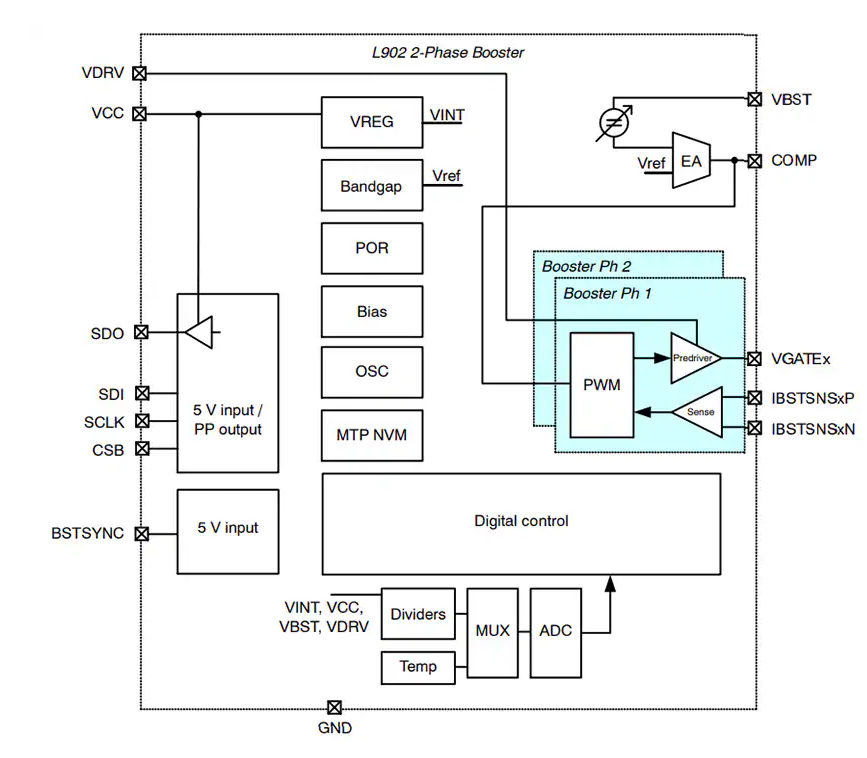
onsemi NCV78902兩相升壓LED驅動器核心技術解析
基于UART通訊控制TMC2208/2209模塊驅動兩相四線步進電機

HR4988微特步進電機驅動器:高效便捷的驅動解決方案
?DRV8821 雙路步進電機控制器與驅動器技術文檔總結
?DRV8824-Q1 汽車級步進電機驅動器技術文檔總結
?DRV8434步進電機驅動器技術文檔總結
?DRV8818A 35V步進電機驅動器技術文檔總結
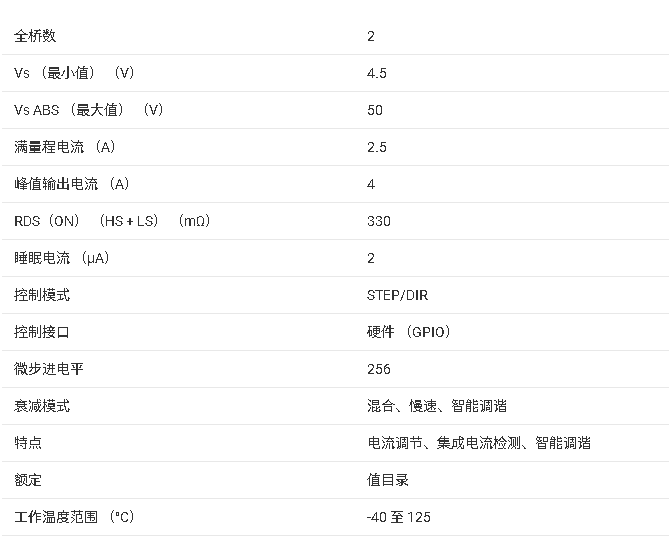
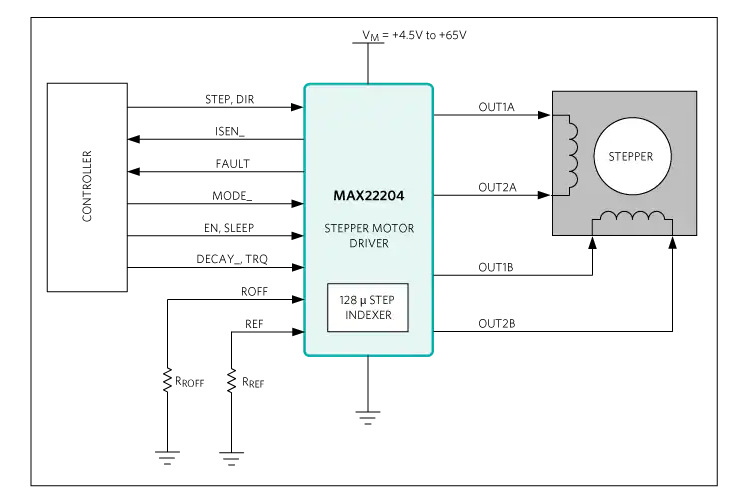
Analog Devices / Maxim Integrated MAX22204步進電機驅動器數據手冊
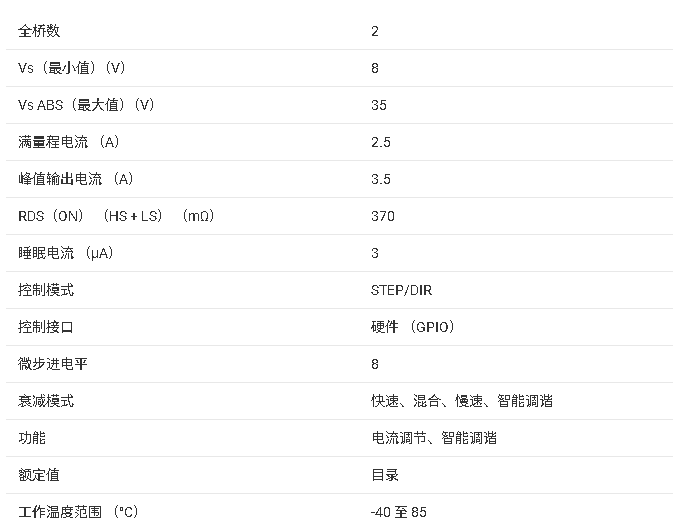
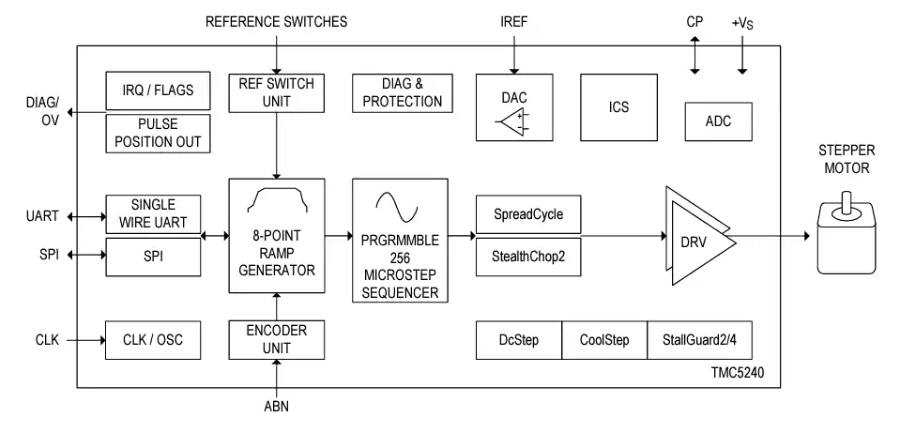
ADI Trinamic TMC5240x步進電機控制器和驅動器IC
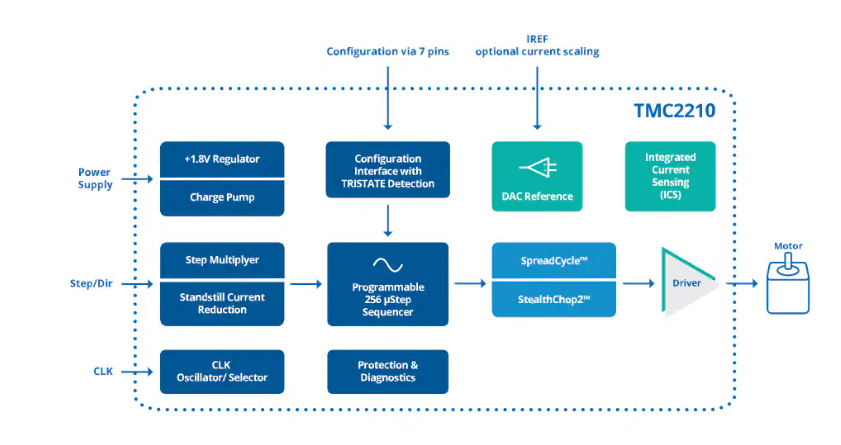
ADI Trinamic TMC2210大電流步進電機驅動器IC數據手冊
TB67S109AFTG, TB67S109AFNG是一款采用PWM斬波器的兩相雙極步進電機驅動器內置有時鐘輸入解碼器。采用BiCD工藝制造



 工商網監
工商網監
評論