 伺服電機和步進電機的核心區別
伺服電機和步進電機的核心區別

來源:曉煜大發現
大家在運動控制的時候是用伺服電機的還是用步進電機做定位控制了?為什么有時候用伺服電機,有時候又步進電機?這是什么原因呢?本期我們就一起來探討一下步進電機和伺服電機的區別!
工作原理對比
伺服電機和步進電機的核心區別在于控制系統原理。伺服電機采用閉環精準控制,而步進電機采用開環步進控制,這兩種不同的工作原理決定了它們在精度、響應速度和成本等方面的差異。
什么意思呢?什么是開環?什么是閉環?要理解這個含義的話,那我們首先要明白他們的工作原理是怎么樣的。
我們要驅動步進電機讓他動起來,就要給步進電機發脈沖。比如說我發1000個脈沖,那么步電機就運行1000個脈沖,然后它停止。
那么問題又來了,什么是脈沖?
其實你可以把它理解為01信號,就是開關,開關,開關,開關。1000個脈沖就是有1000個開關。這是人力是不能實現的,這個時候我們要借助晶體管plc的高速脈沖口幫我們完成這種事情。這就是步進電機的驅動方式。步進電機的結構一般都是帶小齒的,通過這些小齒從而能精準的發送每一個脈沖的角度是怎么樣的,然后發多少個脈沖,然后它轉一圈。
我們的步進電機驅動器一般上面都會有個細分,我們通過波動驅動器上面的細分,從而達到多少個脈沖轉一圈。就在這里面設置的。
那我們伺服電機是怎么驅動的嘞?
其實也是一樣,也是通過脈沖的方式驅動。但是他唯一不同的是。步進電機如果我發1000個脈沖,它突然停止了。我這個時候我就不知道他是否真的到了1000個脈沖停止了,還是半路出了問題停止的。他沒有一個反饋信號。
而伺服電機就不一樣了,我給他發1000個脈沖,他會實時反饋我當前走了多少位置。
為什么會出現這種現象呢?
因為步進電機只是單純的在輸入端給信號。而輸出端是沒有信號的。所以我只給了一個命令讓你執行,他執行我也不反饋。而伺服電機不一樣,他不僅在輸入端有信號,輸出端還會反饋一個信號
回來然后我們就可以看到他當前的位置是怎么樣的。是否真的走完了1000個脈沖還是在半路停止了。
所以我們的伺服電機總是會帶有一根編碼器線。這個編碼器線就是電機的反饋信號。而我們的步進電機是沒有這個東西的。
這就是簡單的開環和閉環。有頭有尾是閉環。只有頭那就是開環。
控制區別
伺服電機:閉環精準控制
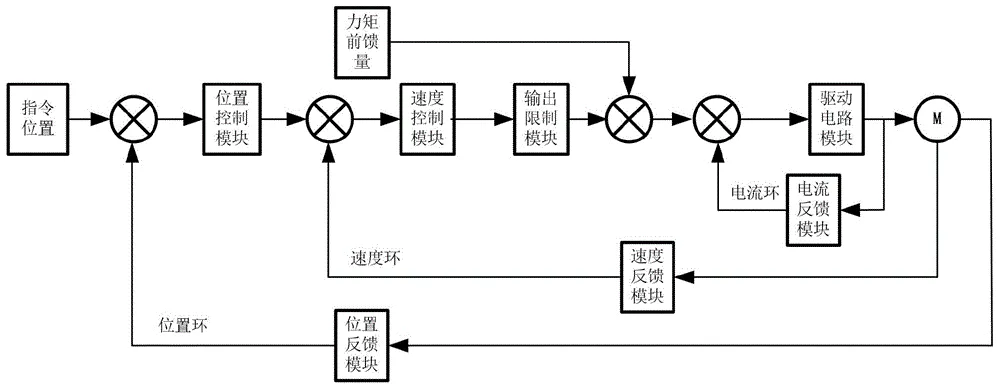
伺服電機采用"GPS導航"式閉環控制系統,確保極高的精度和動態響應性能。
編碼器反饋系統
如同GPS實時定位,編碼器持續監測轉子位置,精度可達0.001mm級別。
三環調節機制
電流環(最內層):像肌肉調節發力大小
速度環(中層):如車速表維持恒定速度
位置環(外層):類似導航系統修正路徑
步進電機:開環步進控制
步進電機工作如同"數步子走路",通過脈沖信號實現精確的角度控制。
脈沖驅動機制
每個脈沖對應固定步距(如1.8°),通過脈沖計數實現角度控制。
開環工作模式
像盲人按固定步數移動,系統無法自動檢測和糾正位置偏差。
選用
我們在做項目時,如果定位精度要求不高的話,我們可以考慮上步進電機。如果定位精度高的話,那就是上伺服電機。
如果項目真的是又要求定位稍微精準一點。而價格利潤又比較低的情況下,我們可以采用步進電機加編碼器的組合進行。
總而言之一句話,想高精度高定位上伺服,低成本的話就步進加編碼器。
-
步進電機
+關注
關注
153文章
3260瀏覽量
152560 -
伺服電機
+關注
關注
88文章
2193瀏覽量
61371 -
運動控制
+關注
關注
5文章
828瀏覽量
34606
原文標題:伺服電機和步進電機的區別
文章出處:【微信號:gkongbbs,微信公眾號:工控論壇】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄







 工商網監
工商網監
評論