 電子發燒友App
電子發燒友App



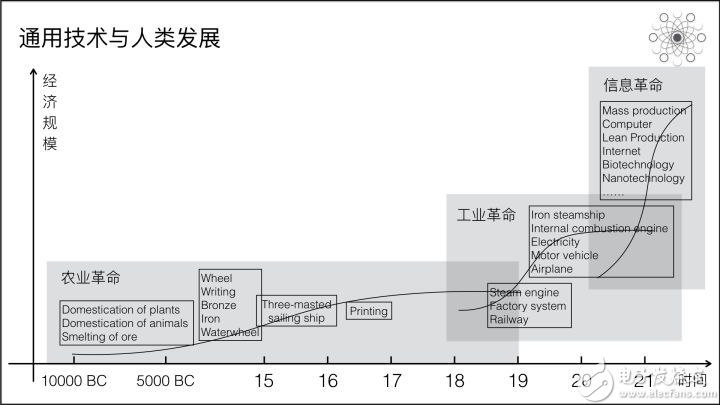
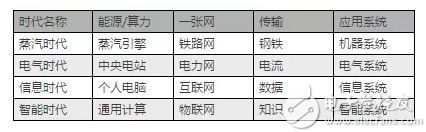
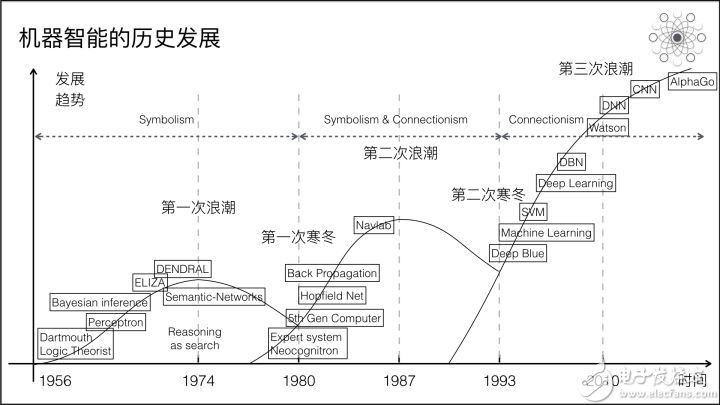
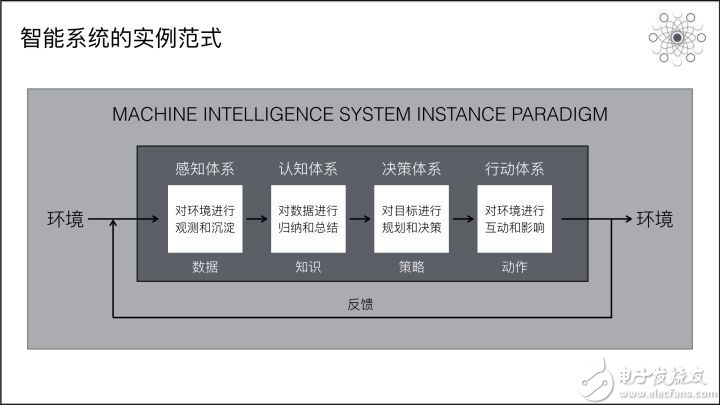
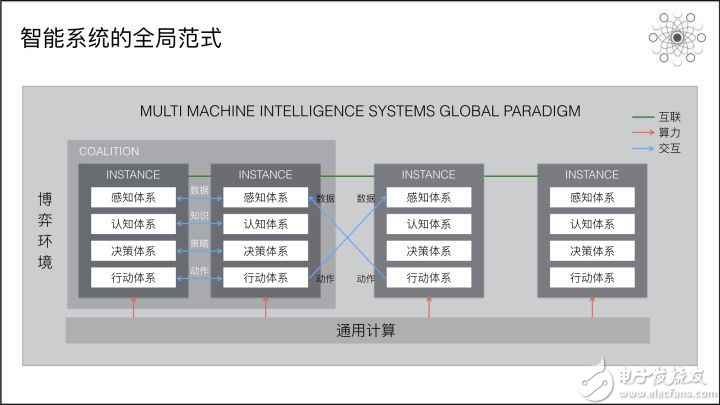
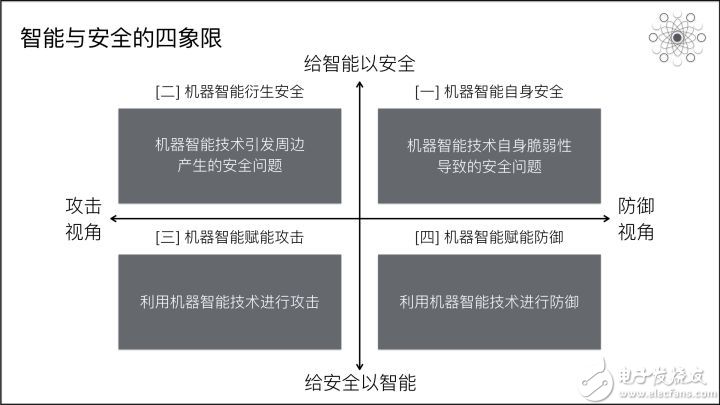
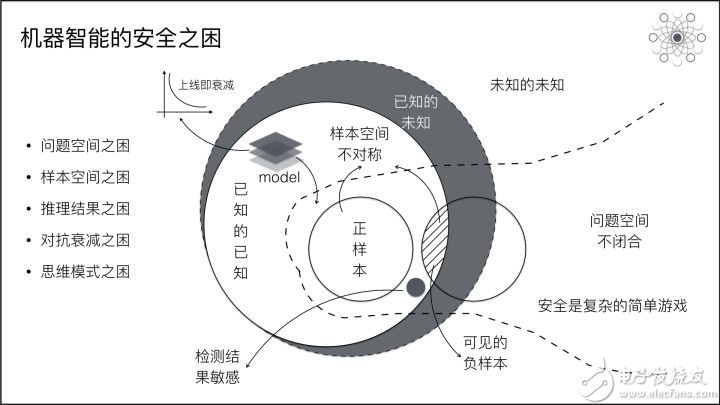
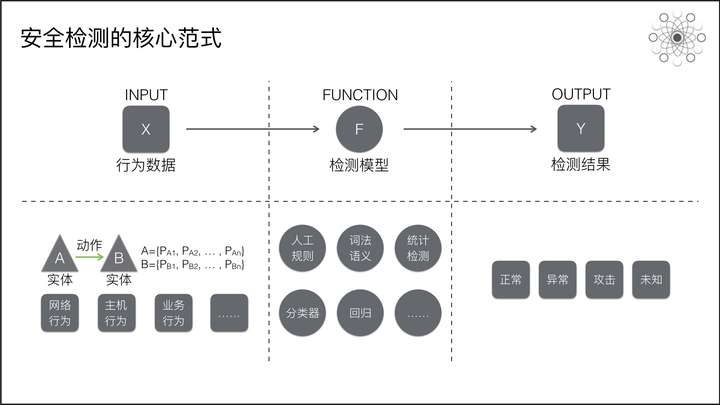
寫文章 草稿已保存 我們終其一生,都在尋找各自的終極答案。我們無時無刻,無不希望能在自己從事的領域離真相更近一步,哪怕是一小步。對威脅的對抗、對情報的研判、對數據的分析、對知識的理解、對智能的追尋、對內心的挖掘、對人性的洞察、對生命的頓悟、對世界的認知、對宇宙的探索,歸根結底都是對真相的渴望。 安全的真相是什么?安全的過去是人與人的對抗,安全的現狀是攻擊者加攻擊機器對抗防御者加防御機器。而未來安全的終局,一定是機器與機器的自主對抗。從這個角度來看,安全的本質其實是智能體之間的知識對抗,智能可以是碳基的智能,也可以是硅基的智能。到終局那一天我們有沒有「搞清楚安全」顯得一點都不重要,重要的是到那一天我們親手鍛造的機器智能,作為人類智能的延伸,注定是會早于我們一步,提前觸達安全的真相。 通用技術與人類發展 技術是人類自身能力的延伸,發明技術是人類最大的天賦。早在現代智人出現之前,早期的原始人就發明了各種技術,使得他們在與其他動物的生物競爭中更占優勢。而在人類歷史進程中,生產力和經濟水平的一次次躍遷,背后的核心推動力是一代又一代通用技術(GPTs General Purpose Technologies)的發明。通用技術通過對已有經濟結構和社會結構的影響,徹底影響著人類的發展進程。 通用技術是單一可識別的基礎性共性技術,目前為止人類歷史上只有二十來種技術可被歸類為通用技術,這些技術具有如下幾個特點: 「無處不在」通用技術有著各種各樣的使用用途以及大量廣泛的使用場景; 「持續改進」隨著時間的推移,通用技術不斷在改進使用成本也不斷降低; 「驅動創新」通用技術使技術創新和技術發明更加容易,催生更多新產品。 從新石器時代農業革命,對動植物的馴化技術、文字書寫技術,到18-19世紀第一次工業革命,蒸汽引擎技術、工廠系統、鐵路系統……,到第二次工業革命,內燃機技術、電力技術、汽車技術、飛機技術……,再到20世紀信息革命,計算機、互聯網、生物科技等。通用技術的發明間隔時間越來越短、密集程度越來越高、影響范圍也越來越大、生產力的提升也越來越快。 同一時代各種通用技術之間的技術銜接產生的協同效應,更是對生產力提升、經濟發展、促進創新起到了疊加推動的作用。蒸汽時代,蒸汽引擎提供動力能源,鐵路網連接各個物理空間傳輸鋼鐵等物資,應用到各種機器系統。電氣時代,中央電站提供電力能源,電力網連接各個物理空間傳輸電流,應用到各類電氣系統。 信息時代,個人電腦(或服務器)提供計算能力,互聯網連接傳輸數據,連接各個數字空間的信息系統。而在智能時代,通用計算(云邊端等各類計算形態)提供計算能力,物理空間和數字空間的邊界會越來越模糊形成融合空間,萬物互聯網連接融合空間中的各個智能系統。不同的時代,通用技術之間有著相似的協同方式。蒸汽時代給機器以動能,電力時代給機器以電能,信息時代給機器以數據,智能時代給機器以知識。 機器智能的歷史發展 在所有通用技術中,機器智能又是最為特殊的一種通用技術,這是人類第一次發明讓機器能自主獲取知識的技術,也是人類第一次有能力打造非碳基體系的智能體。 1882年2月一個寒冷的下午,年輕的尼古拉·特斯拉完成了困擾其5年的交流電發電機設想,欣喜若狂地感嘆道「從此之后人類不再是重體力勞動的奴役,我的機器將解放他們,全世界都將如此」。 1936年,為證明數學中存在不可判定命題,24歲的艾倫·圖靈提出「圖靈機」的設想,1948年在論文《 INTELLIGENT MACHINERY》中描繪了聯結主義的大部分內容,緊接著在1950年發表《COMPUTING MACHINERY AND INTELLIGENCE》,提出了著名的「圖靈測試」。同年,馬文·明斯基與其同學鄧恩·埃德蒙建造了世界上第一臺神經網絡計算機。 1955年馮·諾伊曼接受了耶魯大學西里曼講座的邀請,講稿內容后來匯總成書《THECOMPUTER AND THE BRAIN》。1956年,約翰·麥卡錫在達茅斯學院夏季學術研討會上首次提出了「Aritificial Intelligene」的概念。至此,機器智能的歷史序幕正式拉開,符號主義(Symbolism)、聯結主義(Connectionism)、行為主義(Actionism)三大流派相繼形成。 機器智能發展至今,經歷了幾次浪潮和寒冬,三大主義也各自起起落落。50年代起,以專家系統、經典機器學習為代表的符號主義長期占據統治地位。相比之下聯結主義則歷經了一波三折,從感知機的提出到80年代反向傳播的發表,再到深度學習借助算力與數據大獲成功,到2018年三巨頭Geoffrey Hinton、Yann LeCun、Yoshua Bengio獲得圖靈獎,最后才變得炙手可熱。而以強化學習為代表的行為主義在2016年AlphaGo、AlphaZero的橫空出世之后大獲關注,更是被譽為通向通用機器智能的必經之路。 人類智能的演化經歷了上百萬年,機器智能演化迄今為止也才六十余年。盡管通用機器智能依舊還很遙遠,但今天機器智能在很多領域已經逐漸超過了人類智能。過去這六十年,數據計算能力、數據存儲能力、數據傳輸能力都至少提升了1000萬倍。同時數據資源的增長速度,更是遠遠超過摩爾定律增長的速度,預計到2020年全球數據總量能達到40ZB。機器智能今天已經到達通用技術爆炸的一個關鍵節點,同時在其他通用技術的協同作用下,這一次通用技術引發的變革會比以往任何一次都來得更劇烈。 數據驅動到智能驅動 「商業智能與智能商業」、「安全智能與智能安全」……類似這樣的詞還有很多,二者之間核心的區別前者是單點的智能,后者是全局的智能,前者是基于數據驅動,而后者是基于智能驅動。「數據驅動」與「智能驅動」看似相似但卻有著根本性的區別,最本質的不同是背后決策主體的不同。「數據驅動」最終還是依賴人類來做決策,數據只是提供了能夠做出更好決策的輔助判斷信息,而「智能驅動」則是機器取代人類直接做在線決策。 人類大腦受認知偏見的影響一直是生命進化的結果。受限于人腦信息傳輸帶寬和信息處理速度的限制,從早期狩獵者階段開始,人類就逐步形成了基于簡單啟發式的推理決策系統,規避了處理大量信息的高額成本。這使得人類在處于各種危險的環境時能夠快速、幾乎無意識地做出決策,文明才得以延續至今。然而,快速和幾乎無意識的決策并非意味著總是最佳甚至是準確的決策。 啟發式的方法通過遺傳,成為刻入我們大腦中預先加載的認知偏差,這些「偏見」以偏離理性客觀的方式影響人類的決策。直到「數據驅動」時代的來臨,豐富海量的在線數據為更好的決策提供了輔助判斷的依據。我們用通用計算、海量數據處理技術,將數據量減少到人腦可消化的摘要范圍之內,用于各種應用場景下的輔助決策。 「數據驅動」相比以往基于「直覺驅動」或「經驗驅動」有著無法比擬的優勢,但人類在這其中仍然扮演著「中央處理器」的決策主體,這依然存在著局限性。人腦處理器的吞吐量限制,無法處理全量原始數據,只能將全量數據資源變為「匯總數據」或「摘要數據」,進而再從其中提取知識。這個過程注定是伴隨著信息量的損失,從而會丟掉全量數據中的部分隱含關系、數據模式以及數據背后的洞察。 「智能驅動」是讓機器智能直接做線上決策,無論是決策效率、規模程度、客觀程度還是進化成長速度,都是「數據驅動」所無法比擬的。「智能驅動」是直接從全量數據資源中提取全量知識,然后運用全量知識直接進行全局決策。「數據驅動」本質上是匯總數據加人類智能,「智能驅動」的本質則是全量數據加機器智能。 然而現實的現狀是在業務場景中我們大量的決策連「數據驅動」都還沒做到,更談不上「智能驅動」。機器智能實現「感知」只是第一步,實現「決策」則是更為關鍵的一步,現階段的機器智能正如丘吉爾的一句話「Now this is not the end, it is not even the beginning of the end.But it is perhaps the end of beginning」。那么,到底什么才是真正的機器智能系統? 智能系統的核心范式 真正意義上的智能系統,實例的核心范式一定有如下幾個組成部分:感知體系、認知體系、決策體系、行動體系。同時,一個智能系統的實例,一定離不開與環境的交互,過去我們總是過多的強調和關注系統內在本身,卻容易忽視與環境交互的作用。 感知體系的作用是對環境進行觀測和沉淀,產出的是數據。一切數據的產生都源于對環境的觀測和沉淀,觀測和沉淀背后的動機是我們測量、記錄、分析世界的渴望。信息時時刻刻存在于環境中(數字空間或物理空間),在不同的場景下,我們用硬件、軟件、算法的方式,將其「數據化」。硬件有如傳感器、攝像頭等,軟件如日志記錄器、數據采集器等,算法如各類智能視覺算法、智能語音算法等。終有一天,我們能夠將一切物理空間都數據化,將物理空間完完全全映射到數據空間。 認知體系的作用是對數據進行歸納和總結,提煉出知識。人類理解的知識一定是要用自然語言表達,而對機器而言,用能夠代表問題空間的數據集進行訓練,再用訓練好的「模型」來在新的數據空間中進行推理。只要是能解決特定目標任務,無論其表現形態是向量、圖譜還是自然語言,其實都是知識,特征空間的表達本身就是一種知識。 決策體系的作用是對目標任務進行規劃和決策,生成對目標任務的策略。行動體系根據策略執行具體動作,和環境進行交互、對環境產生影響。動作作用于環境后形成反饋,反饋又促進感知體系感知更多的數據,進而持續獲取更多的知識,對目標任務作出更好的決策,形成閉環持續迭代進化。 從這個角度來看,機器智能的本質,實質是一種觀測環境沉淀數據、歸納數據提煉知識、規劃目標在線決策、作出行動影響環境的自主機器。機器智能是一種自主機器,而自主機器與過去自動化機器的最大區別在于其能否自主獲取解決目標任務的知識。 單體智能到群體智能 今天大多數的智能系統,都是一個個孤立分布的單體智能實例,解決的相應也是一個個孤立分布的單體問題。云計算的本質是「計算在線」,大數據的本質是「數據在線」,而機器智能最終也需要實現讓智能在線,讓智能實例之間進行自主在線交互。 單個智能實例都是由「感知-認知-決策-行動」的體系構成的自主系統,有著自己的世界表征形式,能自主完成自身的目標任務。在同一個動態復雜的博弈環境之中,實例與實例之間通過互聯實現在線,彼此存在相互作用,可以合作、競爭,可以競合并存,也可以既不合作也不競爭。一個實例的策略變化不光會影響自身的環境,也會影響其他實例的策略變化。 對于合作的多個智能實例之間,可以選擇共享數據、知識、策略或動作,協調協作以完成更為復雜的目標任務,共同形成更為高階的智能實例。當單位空間內智能實例的覆蓋密度足夠大的時候,單體智能開始向群體智能演進。 智能與安全的四象限 安全是所有技術中最為特殊的一種,嚴格意義上甚至或許都不能稱「安全」為一門技術。早在人類還未發明任何技術之前,安全就已經伴隨著人類的各種活動。迄今為止,沒有任何一種技術是安全領域獨有或者說從安全領域長出來的,但安全從來都是與其他技術相伴相生、相輔相成。 任何一門通用技術,與安全的結合都有如下四種方式。機器智能技術也不例外,縱向是「給智能以安全」和「給安全以智能」,橫向是「攻擊視角」和「防御視角」。給智能以安全,是指機器智能技術本身會帶來新的安全問題,一種是機器智能自身脆弱性導致的安全問題,一種是機器智能引發周邊場景衍生出的安全問題。給安全以智能,是指將機器智能應用于安全場景,攻擊者利用機器智能賦能攻擊,防御者利用機器智能賦能防御。 而在這四個象限中,新技術與安全發生交集的時間和發展的成熟程度又有所不同。攻擊者相比防御者而言,有更強的動機和利益,所以攻擊相關的象限通常都會更容易去探索新技術去接納新技術。防御者總是滯后,也總是容易沉迷于舊技術和人工經驗營造出的安全假象中,導致第四象限總是發展最滯后最緩慢的一個象限。當然,這與防御視角自身的屬性與困境也有直接關系。 機器智能的安全之困 圍棋是簡單的復雜游戲,而安全是復雜的簡單游戲。1994年,認知科學家Steven Pinker在《The Language Instinct》中寫道「對機器智能而言,困難的問題是易解的,簡單的問題是難解的」。「簡單的復雜問題」指的是問題空間是閉合的,但是問題本身卻又有較高的復雜度,「復雜的簡單問題」指的是問題空間是是無限開放式的,但問題本身卻并沒有很高的復雜度。今天機器智能技術在「簡單的復雜問題」的領域,往往都比人類會更強,但對于「復雜的簡單問題」,泛化界限引起的維數災難,機器智能往往都會失效。 安全是一個典型的「復雜的簡單問題」,莫拉維克悖論在安全領域更為明顯。高度不確定性是安全最大的特點,安全自身最大的困境就是如何去應對「未知的未知」。很多時候我們問題都沒定義清楚問題就沖上去說要用機器智能解決問題,這是絕大多數機器智能在安全領域失效的主要原因。今天在安全領域,不太需要去突破智能技術的天花板,亟待解決的反而是「定義清楚問題」,即如何閉合掉問題空間。 安全的問題空間通常都是無界的,同時問題空間對應的正負樣本的樣本空間卻又嚴重的不對稱。「未知的未知」引起的負向數據(如攻擊數據、風險數據等)的嚴重缺乏導致特征空間的不對稱,進而導致特征空間無法真正表征問題空間。「模型」是已有數據空間下關于世界的假設,并且用于在新的數據空間下進行推理。今天機器智能技術已經能很好的解決表示輸入和輸出之間的非線性復雜關系,但對于樣本空間與問題空間存在的巨大鴻溝卻依然比較乏力。 20世紀六十年代,貝爾-拉帕杜拉安全模型(Bell-La Padula )指出「當僅當系統開始于安全的狀態,且一直不會落入非安全狀態,它才是安全的」。由于安全的本質是對抗,對抗的存在導致安全領域的機器智能模型多數都逃不過的「上線即衰減」的命運。在訓練集上表現良好的模型,對于大規模的現實環境,從上線那一刻起就在引起對抗升級,進而不斷跌入失效的狀態。模型衰減和封閉系統中的熵增一樣,是一個必然。 同時,安全場景中對檢測結果的準確性、結果可解釋性都高度敏感。機器智能相比于傳統安全中經常使用的基于規則、基于策略的檢測技術,優勢在于其強大的表征能力,但同時其不可解釋性、模糊性導致推理結果在決策場景下無法直接使用,這也是今天很多智能安全系統大都只在做「感知」,至多也只是做輔助決策的原因。 然而這些都還不是最大的「困」,機器智能在安全領域最大的「困」是思維模式上的困局。安全的思維模式是「守正出奇」,而機器智能的思維模式是「Model The World」。這兩種思維模式之間不僅存在巨大的差異,也異常難調和。一方面極少有人能同時駕馭這兩種思維方式,另一方面把兩種思維的人放到一起也極難協作起來,本質原因是缺少橋梁來銜接安全問題到算法問題之間的相互轉換和定義。 問題空間之困、樣本空間之困、推理結果之困、對抗衰減之困、思維模式之困,這些問題導致了今天絕大多數現實中的智能安全系統的表現都差強人意。或者也可以說得更悲觀一點,今天在安全領域,迄今為止還沒有真正意義的智能安全系統。 真正的智能安全系統 先來說說通用安全場景下的通用數據范式。柏拉圖學派認為「我們感知的世界是洞穴里面墻壁上的投影」,現象世界都是理性世界的倒影,理性世界才是世界的本質或本原。「洞穴比喻」意味著存在一個外在的客觀的知識體系,不依賴人類的認知而存在,人類探索知識的過程就是不斷從現實世界的現象觀察中,摸索、推測這個客觀知識體系的過程。亞里士多德進一步奠定了本體論最初的思想,定義其為研究「存在」的科學,是形而上學的基本分支。再到17世紀,哲學家郭克蘭紐 (R. Goclenius) 首次提出「Ontology」一詞,再到20世紀60年代,機器智能領域開始引入Ontology的思想,之后又進一步演化出語義網、知識圖譜等。 安全中的對抗本質是知識的對抗,獲取知識更多的一方就能擁有更多的不對稱優勢。無論是威脅分析、情報研判、攻擊檢測、事件溯源……本質都是在探索知識的一個過程,這就是為什么Palantir的Gotham、IBM的I2、UEBA、各種威脅情報產品等等背后都不約而同或多或少借鑒了Ontology思想的根本原因。 而安全場景下的通用數據范式,也離不開Ontology。實體、屬性、行為、事件、關系,通過這五大元數據類型,可以構建出所有安全場景中的數據架構(無論是基礎安全、業務安全、數據安全、公共安全、城市安全……注:公共安全領域也單獨關注「軌跡」這一類元數據類型,因「軌跡」是一種特殊的「行為」數據,故這里統一都合并成行為)。 實體:實體是客觀存在并可以與其他對象區分開來的對象; 屬性:屬性即為標簽,是描述實體的表述,對實體抽象方面的刻畫; 行為:行為是實體在特定時間、空間下發出的動作; 事件:事件是一定時空或條件下所認識到的可識別的事情; 關系:關系是實體與其他實體之間的關聯程度與表述。 安全領域絕大多數沉淀的源數據都是行為類數據,無論是網絡流量日志、主機命令日志、業務日志、攝像頭數據流、感知設備數據流……,這些都是行為數據。而實體、屬性、關系、事件的產生都是從行為數據中進行萃取,通過對不同的行為數據運行不同的 Function 來產生。 當 Function 是生成事件的時候,即為安全檢測問題,包括攻擊檢測、威脅檢測、風險檢測、異常檢測等等。絕大多數安全檢測問題的原子范式都可以抽象為Y=F(X),其中X是實體的行為數據,Y是檢測結果,F是檢測模型。F可以是基于規則、基于策略、詞法語義、統計檢測、機器學習、深度神經網絡等等,Y可以是正常、異常、攻擊或者未知。 更為復雜的檢測場景也都可以通過一個個基本F與各類算子組裝編排而成。每一種類型的F都有其優勢和劣勢,有不同的最優使用場景,并不存在一種絕對先進絕對領先的檢測技術。事實上算法在安全檢測中最應該關注的不是去做檢測模型本身,而是能否自主化的根據各種場景生成最優的檢測模型,并能自主化持續迭代檢測模型。 真正意義上的智能安全系統一定也是具備感知體系、認知體系、決策體系和行動體系,同時和環境形成反饋閉環。感知體系至少包括異常感知器、攻擊感知器、漏報感知器和誤報感知器。「異常感知器」的作用一方面是保持感知「未知的未知」的能力,另一方面是利用「通過定義正常來尋找異常」的思想來解「樣本空間之困」的問題。「攻擊感知器」的作用是在異常數據的基礎上去檢測攻擊,為了解「推理結果之困」的同時,也大大縮減推理結果誤報漏報范圍。「漏報感知器」和「誤報感知器」是為了去解「對抗衰減之困」。由此可以看出,整個行業內大家最常關注的「用算法做攻擊檢測」,其實只是做了智能系統當中感知體系里很小的一小步。 認知體系沉淀的是跟安全相關的各種知識,至少包括正常知識、攻擊知識、漏報知識、誤報知識。安全知識可以是基于專家規則、向量、模型、圖譜、自然語言等等,但無論是哪種形態,一定都是精細化個性化的「千人千面」的知識。即對每一個受保護對象(如用戶、系統、資產、域名、數據等),沉淀形成適用于該受保護對象的一套感知異常、攻擊、漏報、誤報的知識。決策體系當中至少包含對目標任務的攔截策略、各類模型的上線下線等策略等,能自主決策哪些行為該攔截,哪些模型已經衰減該重訓練該替換等。 行動體系當中是各類作用于環境的動作,如放行、阻斷、重訓練、發布等等。一個真正的智能安全 instance 里面包了含成千上萬的 agent ,每一個 agent 只作用于其對應的受保護對象。最后,「問題空間之困」的解法是將開放的問題空間收斂為一個個小的閉合的風險場景,一方面靠的是四個感知器的級連形成的縱深檢測,另一方面靠的就是「千人千面」的 agent 。 機器智能重塑新安全 安全領域發展至今,一直處于問題消滅得少概念卻造得不少的階段,亟待利用新技術去真正解決舊問題。機器智能在各個行業的炙手可熱,同樣也引起了安全行業的追捧。但今天安全領域的智能能力參差不一的同時,又難以分辨其真假。以至于但凡用了一丁點算法的,都會宣稱「基于人工智能的XX安全系統」。同早年的智能駕駛領域一樣,今天的智能安全也亟需統一的分級標準,用以明確不同級別智能安全技術之間的差異性。「安全的本質是智能體的對抗」,故根據自主對抗的程度,我們將智能安全劃分為L0~5共如下6個級別: L0級別為「人工對抗」,即完全沒有任何機器智能的能力,完全由防御者人工雨攻擊者進行對抗,對抗操作、感知判斷、任務支援全都由人工進行。 L1級別為「輔助對抗」,由機器完成已知攻擊的攻擊檢測和攻擊防御,其余的操作(如感知未知威脅、感知漏報、感知誤報等)由人類進行。 L2級別為「低度自主對抗」,由機器完成已知攻擊攻擊檢測和攻擊防御,并具備能感知未知威脅或誤報漏報,其余由人類操作。 L3級別為「中度自主對抗」,由機器完成所有的對抗操作(攻擊檢測、攻擊防御、主動感知未知威脅、誤報漏報主動感知、對抗升級自動學習),根據系統要求,人類在適當的時候進行應答(中間過程必須需要人類參與)。 L4級別為「高度自主對抗」,由機器完成所有的對抗操作,根據系統要求,人類不一定提供所有的應答(中間過程非必須有人類參與),但只能作用于限定的特定的安全場景(如網絡域、主機域等)。 L5級別為「完全自主對抗」,由機器完成所有的對抗操作,根據系統要求,人類不一定提供所有的應答,不限定特定的場景,作用于全域范圍。 不同于智能駕駛技術,不同的 Level 采用的是完全不同的技術棧,智能安全中的 L0~5 是需要逐步往上構建往上發展。按照這個劃分,今天行業內絕大部份的安全系統都是L1 的系統,極少一部分能達到 L2,但還沒有真正意義上的L3及以上的智能安全系統。隨著級別往上走,能夠將防御者從低水平對抗中逐步釋放出來,能更加關注高級對抗,L3是個分水嶺,有望在5年內實現。「始于圍棋終于安全」,機器智能在安全領域的終局是什么?網絡層、主機層、應用層、業務層、數據層都分別有各自的智能實例,不同層的實例在線互聯,實現真正意義的協同防御與情報共享。當智能「Intelligence」和情報「Intelligence」融合的那一天,才是真正的「Intelligence Remodels New Security」。 目前阿里云智能安全實驗室正在多個領域打造L3級別的智能安全系統,致力于智能技術在云安全中的應用,現招聘安全算法專家和安全數據專家,尋志同道合者一起探索打造「智能重塑新安全」。目前在不到一年的時間,已經取得了一定的階段性成果: LTD 攻擊檢測算法入選人工智能頂會 IJCAI 2019「Locate Then Detect:Web Attack Detection viaAttention-Based Deep Neural Networks」; WAF AI 內核助力阿里云 WAF 入選 2019 Gartner Web 應用防火墻魔力象限,算法能力被評為強勢; Anti-Bot AI 內核助力阿里云爬蟲風險管理入選 2018Forrester Bot Management 競爭者象限; 內容安全算法助力阿里云在國家級重保活動中平穩度過,無任何風險外漏; 上線[XDATA]安全數據內核、[XID]核心數據資產、[XService]智能安全服務、[弦+]安全知識引擎等一系列安全數據平臺服務產品,上線百億級節點千億級邊的復雜網絡和圖計算應用;上線QPS千萬級的復雜流計算應用。 本文為云棲社區原創內容,未經允許不得轉載。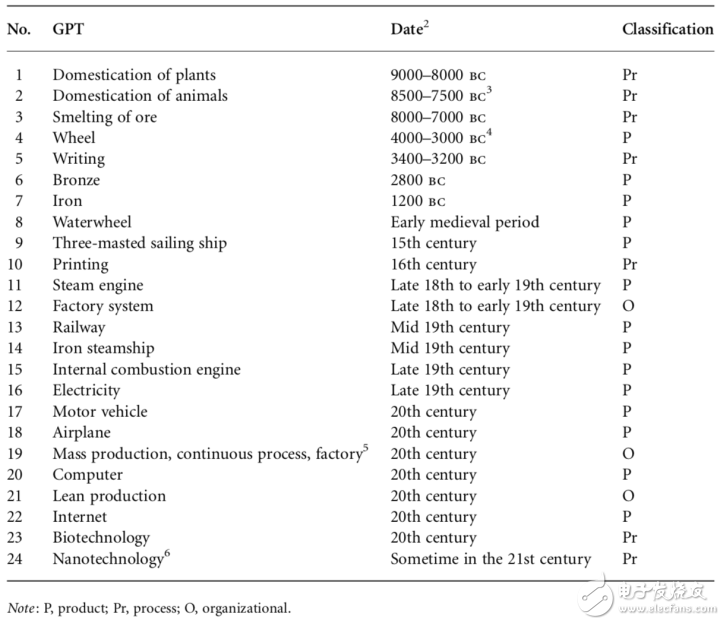




深度好文 | 機器智能的安全之困


相關推薦
熱點推薦
珞石機器人亮相2025全球具身智能機器人前沿技術與產業生態合作大會
2025年12月27日,由珞石機器人主辦的“2025全球具身智能機器人前沿技術與產業生態合作大會”圓滿落幕。本次大會以“具身躍遷?生態共榮”為主題,匯聚全球具身智能與機器人領域的頂尖專家學者、產業
2026-01-05 09:25:02 352
352
352黑芝麻智能與聯想研究院機器人實驗室達成戰略合作
黑芝麻智能與聯想研究院機器人實驗室的戰略合作,旨在通過技術深度融合,匯聚雙方在芯片計算與系統算法領域的尖端能力,構建行業領先的機器人智能解決方案,加速智能機器人的創新與規模化應用。
2026-01-04 18:20:551089
1089銀河通用機器人拿下1000 臺機器人訂單,推進具身智能工業場景深度應用
(股票代碼:603331)簽署戰略合作,雙方將圍繞工業精密制造的復雜場景,開展具身智能機器人的規模化深度應用,在百達精工及其生態體系內部署超過1,000臺銀河通用具身智能機器人。 銀河通用聯合創始人姚騰洲(左)與精密制造的領先工業企業百達精工董事長施小友(
2025-12-23 18:24:141159
1159
穿孔機頂頭檢測儀 機器視覺深度學習
LX01Z-DG626穿孔機頂頭檢測儀采用深度學習技術,能夠實現頂頭狀態的在線實時檢測,頂頭丟失報警,頂頭異常狀態報警等功能,響應迅速,異常狀態視頻回溯,檢測頂頭溫度,配備吹掃清潔系統,維護周期長
2025-12-22 14:33:50
機器人用霍爾電流傳感器,能提升操作安全性么?
在工業機器人、協作機器人、醫療機器人等領域,安全操作始終是核心訴求——從工業機械臂的動力系統過載失控,到服務機器人的電路短路起火,再到醫療機器人的精準動力控制失效,各類安全隱患直接威脅設備穩定與人
2025-12-22 09:04:221032
1032
深度剖析 XDPP1100:數字電源控制的卓越之選
深度剖析 XDPP1100:數字電源控制的卓越之選 在當今科技飛速發展的時代,電源管理技術的重要性愈發凸顯。無論是電信基礎設施、數據中心,還是工業 4.0 應用,都對電源控制器的性能、靈活性和可編程
2025-12-20 11:35:15669
669電路安全防線,平芯微過壓過流保護芯片深度解析與應用指南
置性,將電源保護從一種被動的安全備份,轉變為一種主動的、智能的電源管理前端。它們默默值守在電源入口,如同電路的“智能保險絲”與“電壓哨兵”,有效抵御來自外部供電環境的各種風險,為后續昂貴的核心集成電路
2025-12-20 10:59:39
3000W機器人設備配件激光焊接機
3000W機器人設備配件激光焊接系統整體介紹該系統并非單一設備,而是一套集成了高功率激光器、工業機器人、專業焊接頭、工作臺、控制系統及安全防護于一體的自動化智能制造單元。其核心價值在于為機器
2025-12-18 09:45:21
英特爾攜手產學合作伙伴發布《具身智能機器人安全子系統白皮書》
近日,在2025英特爾中國學術峰會上,英特爾聯合學界及產業界的合作伙伴發布了《具身智能機器人安全子系統白皮書》(以下簡稱《白皮書》),從系統架構層面提出了一個安全子系統的設計框架,旨在為機器人系統
2025-12-16 17:39:56406
406
智能網聯汽車的“數字長城”:CSMS網絡安全管理體系深度解析
的架構也帶來了前所未有的安全風險——黑客可能通過遠程入侵控制車輛轉向、剎車,甚至劫持車載系統。為應對這一挑戰,網絡安全管理系統(CSMS, Cybersecurity Management System)應運而生,成為智能汽車的“數字長城”。 CSMS:智能汽車的“安全中樞
2025-12-15 15:26:39207
207基于鋇錸BL350的協作機器人安全控制解決方案:構建面向未來的智能安全閉環
在智能制造向柔性化、人機深度協同演進的時代浪潮下,協作機器人(Cobot)已成為生產線上的關鍵角色。然而,隨著人機交互距離的不斷縮短和應用場景的日益復雜,傳統的“物理隔離+事后停機”的安全范式已
2025-12-03 16:59:351119
1119人工智能時代,如何打造網絡安全“新范式”
在當今信息化迅速發展的時代,5G、大數據、云計算、深度學習等新興技術的廣泛應用,帶來了前所未有的網絡安全挑戰。人工智能技術的崛起,為網絡安全領域提供了新的解決方案,尤其在威脅識別、告警分析、態勢感知
2025-12-02 16:05:14357
357如何深度學習機器視覺的應用場景
深度學習視覺應用場景大全 工業制造領域 復雜缺陷檢測:處理傳統算法難以描述的非標準化缺陷模式 非標產品分類:對形狀、顏色、紋理多變的產品進行智能分類 外觀質量評估:基于學習的外觀質量標準判定 精密
2025-11-27 10:19:32127
127攻擊逃逸測試:深度驗證網絡安全設備的真實防護能力
攻擊逃逸測試通過主動模擬協議混淆、流量分割、時間延遲等高級規避技術,能夠深度驗證網絡安全設備的真實防護能力。這種測試方法不僅能精準暴露檢測引擎的解析盲區和策略缺陷,還能有效評估防御體系在面對隱蔽攻擊
2025-11-17 16:17:10
推動“AI+網絡安全”深度融合與創新發展
近年來,人工智能技術的快速發展與應用,正在推動各行各業的深刻變革。特別是在網絡安全領域,人工智能的引入為傳統安全防護手段提供了前所未有的提升。 數字化轉型與人工智能的深度融合 在2024年
2025-11-14 17:11:251010
1010永貴電器與智元機器人達成深度戰略合作
近日,浙江永貴電器股份有限公司(以下簡稱:“永貴電器”)與智元創新(上海)科技股份有限公司(以下簡稱“智元機器人”)正式達成深度戰略合作,雙方以技術協同為基石、以產業共創為目標,攜手探索 “人形
2025-11-13 16:45:581591
1591芯源半導體安全芯片技術原理
物聯網設備涵蓋智能家居、工業控制、智能交通、醫療健康等多個領域,由于其數量龐大、分布廣泛、接入方式多樣等特點,面臨的安全威脅復雜多樣。?
數據傳輸安全威脅:設備在與云端、其他設備進行數據交互時,數據
2025-11-13 07:29:27
攜手行業領軍企業,磐時深度賦能黑芝麻智能高端智駕芯片安全
SASETIME攜手行業領軍企業NEWS磐時助力黑芝麻智能完成高端智駕芯片安全賦能近日,由磐時為黑芝麻智能高端智駕芯片提供的安全性咨詢項目已順利結項。在為期半年的合作中,磐時深度嵌入客戶芯片設計階段
2025-11-12 09:03:49582
582
2025智能機器人先進技術論壇成功舉辦:先進方案破解人形機器人設計難題
作為人工智能與機器人技術深度融合的產物,人形機器人正從實驗室走向多元化應用場景,涵蓋工業制造、服務業、醫療康復、教育科研、公共安全和應急救援等領域。中研普華研究院數據顯示,2025年全球人形機器
2025-11-07 09:40:538256
8256
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
更多"、"互動更流暢"是開發者面臨的核心挑戰。傳統的單一屏幕和有限的視覺輸入已成為提升機器人智能化水平的瓶頸。而瑞芯微RK3576高性能處理器的出現
2025-10-29 16:41:20
光速之眼:機器人激光測距傳感器,開啟智能空間感知新紀元
在智能制造的浪潮中,機器人正以“毫米級精度”與“毫秒級響應”重新定義工業效率。而作為機器人的“數字之眼”,激光測距傳感器憑借光速丈量空間的超能力,成為突破傳統測量瓶頸、解鎖智能場景應用的關鍵技術
2025-10-28 08:43:26326
326
智能巡檢機器人
核心技術,突破場景局限 科義履帶式巡檢機器人以 雙導航系統為核心,搭配綜合懸掛系統,輕松跨越復雜地形,實現靈活移動與≤30° 爬坡能力,7×24 小時全天候運行無憂。雙光云臺集成可見光
2025-10-16 10:29:44
揭秘工業 4.0 機器人:感知、安全和控制技術
作者:Aharon Etengoff 投稿人:DigiKey 北美編輯 現代工業機器人系統依賴于日益復雜的基礎設施,以支撐持續演進的人工智能 (AI) 和機器學習 (ML) 功能、無縫互聯以及在工廠
2025-10-04 18:28:001719
1719
AI智能安全帽_從“被動防護”到“主動預防”的智能化革新
隨著物聯網、人工智能(AI)和傳感器技術的快速發展,傳統安全帽已不再僅僅是頭部防護工具,而逐漸演變為一款智能化裝備——AI智能安全帽。它將“防護頭部安全”和“智能監測預警”深度結合,實現從被動防護到
2025-09-27 19:37:41468
468
北斗高精度智能安全帽,厘米級定位,智能告警
產品別名:北斗高精度智能安全帽、北斗高精度智能安全頭盔、智能安全帽一、產品介紹北斗高精度智能安全帽HIZ-SD-TK是專為人員安全防護打造的北斗高精度定位終端,采用創新可拆卸結構設計,完美適配各類
2025-09-26 11:49:51

XKCON祥控輸煤皮帶智能機器人巡檢系統對監測數據進行挖掘分析
XKCON祥控輸煤皮帶智能機器人巡檢系統通過智能機器人在皮帶運行過程中對皮帶的運行狀態和環境狀況進行實時檢測,在應用過程中,不但提升了巡視周期頻次,還通過大數據分析和深度學習算法,對監測數據進行挖掘分析,及時發現設備缺陷故障,為風險防控提供科學依據。
2025-09-15 11:22:20474
474
如何在機器視覺中部署深度學習神經網絡
圖 1:基于深度學習的目標檢測可定位已訓練的目標類別,并通過矩形框(邊界框)對其進行標識。 在討論人工智能(AI)或深度學習時,經常會出現“神經網絡”、“黑箱”、“標注”等術語。這些概念對非專業
2025-09-10 17:38:45764
764
時識科技與姬械機科技達成深度戰略合作
近日,時識科技(SynSense)與姬械機科技(Maschine Robot Tech Group)宣布達成深度戰略合作,雙方將立足于類腦智能技術體系的研發與工業安全行業的應用,攜手推進相關產業生態的建設與發展。
2025-09-06 16:19:58973
973邊聊安全 | 功能安全開發之MPU
上海磐時PANSHI“磐時,做汽車企業的安全智庫”功能安全開發之MPU寫在前面:在與從事功能安全開發行業的同事以及SASETECH社區的成員討論時,筆者經常被問及有關芯片內存保護單元(MPU
2025-09-05 16:21:302170
2170邊聊安全 | 安全芯片的守護神:BIST機制的深度解析
BIST機制的深度解析寫在前面:在安全芯片的設計與驗證過程中,工程師常會遇到一個關鍵概念——BIST(Built-InSelf-Test,內置自檢測)。初次接觸這一術語時,許多人容易將其簡單理解為
2025-09-05 16:17:4129
29安森美如何推動具身智能機器人發展
安森美為機器人應用提供關鍵的感知和電源產品,比如HyperluxTM系列圖像傳感器(包含用于機器人視覺系統的高分辨率iToF 深度成像解決方案),以及可實現先進電機控制的創新的MOSFET 技術和智能電子保險絲。
2025-09-04 10:06:492526
2526
水庫大壩安全的智能監測革命
,都可能如星火燎原,釀成不可挽回的潰壩之殤。現代傳感技術與智能分析正掀起一場“靜默革命”,重塑大壩安全防線。其核心在于構建全天候、立體化的智能感知網絡:感知層:高
2025-09-02 13:41:35689
689
工業機器人的智能之選:永銘電容器解鎖性能潛能
01工業機器人的市場現況在當前的制造業中,工業機器人已成為自動化生產線的關鍵組成部分。隨著技術的不斷進步和創新,機器人正變得更加靈活、智能化,并能夠執行更加復雜的任務。在此背景下,高性能的電容器成為
2025-09-01 10:06:57429
429
地鐵隧道病害智能巡檢系統——機器視覺技術的深度應用
地鐵隧道滲漏水病害檢測智能系統通過分辨率視覺模組對地鐵隧道進行高精度成像,并通過國際先進的深度學習算法能夠在采集的圖像中自動識別出滲漏水區域。
2025-08-29 15:50:53389
389
云翎智能鐵路巡檢高精度工作記錄儀:筑牢鐵路安全“隱形防線”
等前沿技術為支撐,重構鐵路巡檢模式,讓隱患從“肉眼難辨”到“無處遁形”,為鐵路安全構建起一道智能化的“隱形防線”。云翎智能高精度鐵路巡檢工作記錄儀一、傳統巡檢之困
2025-08-28 20:21:21450
450
富唯智能復合機器人力控技術:重新定義精準自動化
在工業自動化和智能醫療快速發展的今天,富唯智能憑借先進的復合機器人力控技術,推出了新一代復合機器人解決方案。該方案深度融合協作機器人、自主移動機器人(AMR)及高精度視覺引導技術,在多類復雜場景下實現超柔性、高精準的作業能力,顯著提升流程自動化水平。
2025-08-26 16:54:26620
620復合機器人:解鎖實驗室自動化的高精度智能引擎
富唯智能將持續深耕實驗室場景,以更智能、更靈活、更安全的復合機器人解決方案,推動科研無人化進程,助力科學家探索未知疆界,釋放創新潛能。
2025-08-18 16:59:31690
690
經世智能檔案存取復合機器人
產品簡介經世智能檔案存取復合機器人,在智慧檔案庫房行業主要應用于檔案自動存取與轉運、涉密檔案管理等環節,通過“AGV移動底盤+協作機械臂+視覺系統”一體化控制方案實現高效自動化作業。機器人機械臂末端
2025-08-13 13:36:24
經世智能晶圓盒轉運復合機器人
產品簡介經世智能半導體行業晶圓盒轉運復合機器人,復合機器人在半導體行業主要應用于晶圓盒轉運、機臺上下料等環節,通過“AGV移動底盤+協作機械臂+視覺系統"一體化控制方案實現高效自動化作業。機器
2025-08-13 13:28:39
實驗室物料轉運復合機器人
產品簡介經世智能實驗室物料轉運復合機器人,復合機器人在智慧實驗室行業主要應用于實驗樣本自動化轉運、高通量實驗流程銜接、危險物料與廢棄物處理等環節,通過“AGV移動底盤+協作機械臂+視覺系統”一體化
2025-08-13 10:06:22
CNC上下料復合機器人
產品簡介經世智能CNC上下料復合機器人,復合機器人集成AGV+機械臂+視覺系統,提供CNC多工序柔性上下料、CNC全自動刀具更換自動化解決方案,打通生產物流最后“一公里"。機器人機械臂末端可定制末端
2025-08-13 09:47:30

ADI解讀機器人控制系統中的安全風險和有效安全措施 為機器人技術的未來發展筑牢安全防線
本文探討了機器人控制系統中的安全風險和有效安全措施。文中介紹了工業安全標準,并分析了滿足工業安全標準所需達到的基本要求。
2025-08-11 11:27:529908
9908
挖到寶了!人工智能綜合實驗箱,高校新工科的寶藏神器
和生態體系帶到使用者身邊 ,讓我們在技術學習和使用上不再受制于人。
三、多模態實驗,解鎖AI全流程
它嵌入了2D視覺、深度視覺、機械手臂、語音識別、嵌入式傳感器等多種類AI模塊,涵蓋人工智能領域主要
2025-08-07 14:30:20
挖到寶了!比鄰星人工智能綜合實驗箱,高校新工科的寶藏神器!
和生態體系帶到使用者身邊 ,讓我們在技術學習和使用上不再受制于人。
三、多模態實驗,解鎖AI全流程
它嵌入了2D視覺、深度視覺、機械手臂、語音識別、嵌入式傳感器等多種類AI模塊,涵蓋人工智能領域主要
2025-08-07 14:23:17
使用德州儀器產品簡化機器人電機驅動器安全評估
隨著機器人系統在工業環境中的應用越來越廣泛,行業安全要求以及國家/地區和國際安全法規需要不斷更新,確保人類在靠近機器的位置工作時擁有安全的環境。功能安全評估可以證明器件滿足安全要求,確保產品能夠負責任地被推向市場。
2025-07-29 15:11:232804
2804
無線化智能機器人的核心:4G工業路由器技術應用全景
在實現機器人的協同作業、遠程操控、柔性生產等高階功能時,高效可靠的網絡連接成為支撐其智能化的核心基礎。深圳惠志科技的WIS901 全球通4G工業路由器,以其廣覆蓋、易部署、低延時、高安全等優勢,正在成為智能機器人行業的重要網絡基礎設施。
2025-07-28 11:40:41655
655
工業機器人的特點
的基礎,也是三者的實現終端,智能制造裝備產業包括高檔數控機床、工業機器人、自動化成套生產線、精密儀器儀表、智能傳感器、汽車自動化焊接線、柔性自動化生產線、智能農機、3D 打印機等領域。而智能制造裝備中工業
2025-07-26 11:22:07
華工科技智能激光除草機器人項目落戶哈爾濱新區
近日,華工科技核心子公司華工激光智能激光除草機器人項目落地簽約儀式在哈爾濱新區成功舉辦,規劃在哈爾濱新區建設智能除草機器人研發生產基地、打造“智耘農樞智慧農業示范基地”,以科技創新助推農業新質生產力發展,服務國家糧食安全。
2025-07-24 10:00:01899
899
單向光閘:用光束筑起數據安全的“光之墻”
網絡安全設備不同,單向光閘的物理單向性是最大特點:數據僅能從發射端單向傳輸至接收端,反向路徑被物理隔絕。這種“只出不進”的機制,如同為數據流動筑起了一道無形的“光之墻”,從根源上杜絕了反向竊取或攻擊
2025-07-18 11:06:07
CES Asia 2025聚焦低空智能感知與空域管理,論壇開啟行業新征程
在科技與產業深度融合的大趨勢下,CES Asia 2025亞洲消費電子展即將盛大開幕,其同期舉辦的低空智能感知與空域管理技術論壇備受全球矚目。此次論壇聚焦低空通信導航監視技術、無人機反制與空域安全
2025-07-10 09:57:58
通過vmRT-Thread和ROS2賦能機器人智能開發
隨著機器人技術的快速迭代升級,協作機器人、復合移動機器人和人形機器人等新興應用場景對實時控制與智能決策的深度融合提出了迫切需求。然而,當前機器人操作系統架構面臨以下關鍵挑戰:算力瓶頸制約智能化發展
2025-06-09 09:23:181387
1387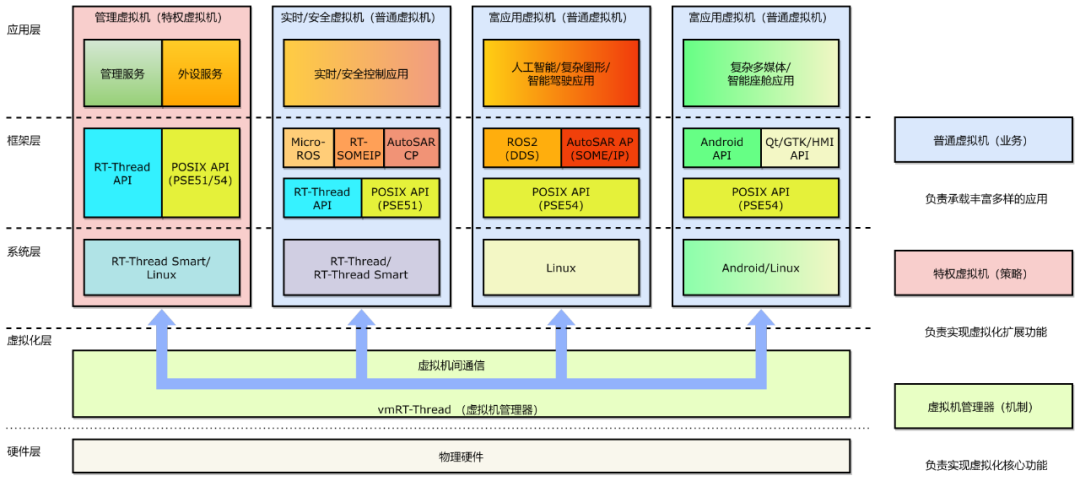
從機械應答到深度交互,移遠通信如何讓機器人“靈魂覺醒”?
率先推出了端&云混合大模型機器人大腦解決方案。該方案深度融合AI、大模型、聲源定位等前沿技術,宛如為機器人賦予了“超級大腦”和“敏銳聽覺”,有效彌補了傳統機器人在
2025-05-20 19:04:29788
788
深度感知的應用和主要方法
近年來,3D 感知技術越來越多地應用于各行各業,尤其是工業自動化、機器人、自動駕駛、醫療保健、AR/VR 和安全領域。3D 感知是用于捕捉環境與物體三維形狀并進行數字化處理的技術的統稱,而深度感知在其中起著關鍵作用。
2025-05-15 17:17:01998
998CAN XL安全實踐:深度防御下的密鑰協商優化
文章探討了車載通信系統中網絡整合的關鍵內容和挑戰,強調未來將采用多層安全架構,包括深度防御和MACsec/CANsec技術。同時,文章也指出目前車載節點通信速率較低,凸顯了中低速通信的基礎性地位。
2025-05-13 13:28:27463
463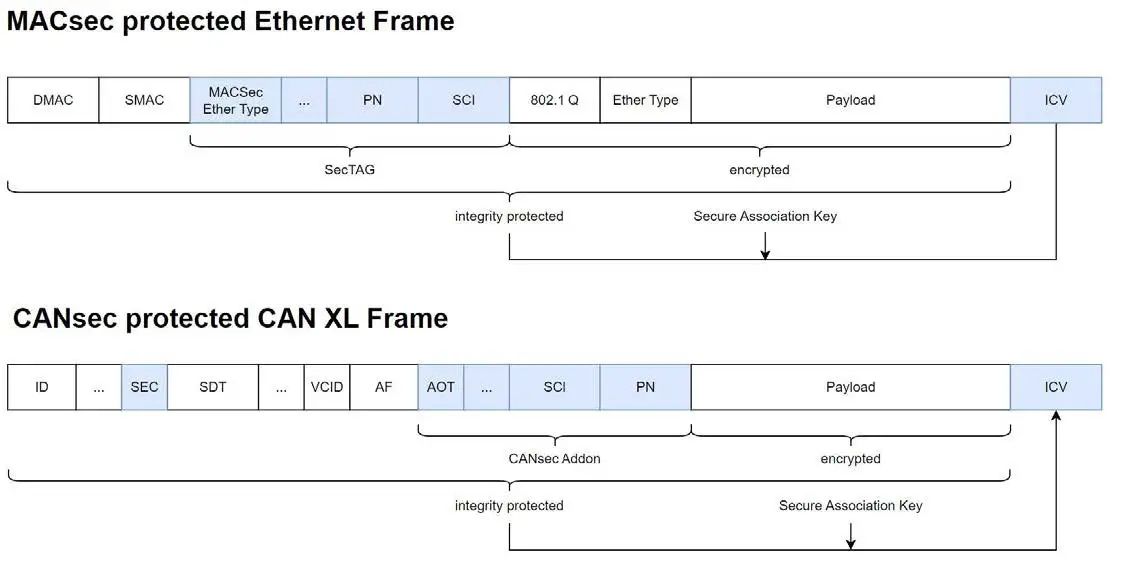
AS-33C激光雷達,為碼垛機器人打造無懈可擊的安全屏障
在智能制造與物流自動化加速發展的背景下,碼垛機器人已成為提升生產效率、降低人力成本的核心設備。然而,隨著應用場景的復雜化,傳統安全防護措施的局限性日益凸顯。傳統安全光柵僅能覆蓋固定線性區域,無法應對
2025-05-13 07:34:13696
696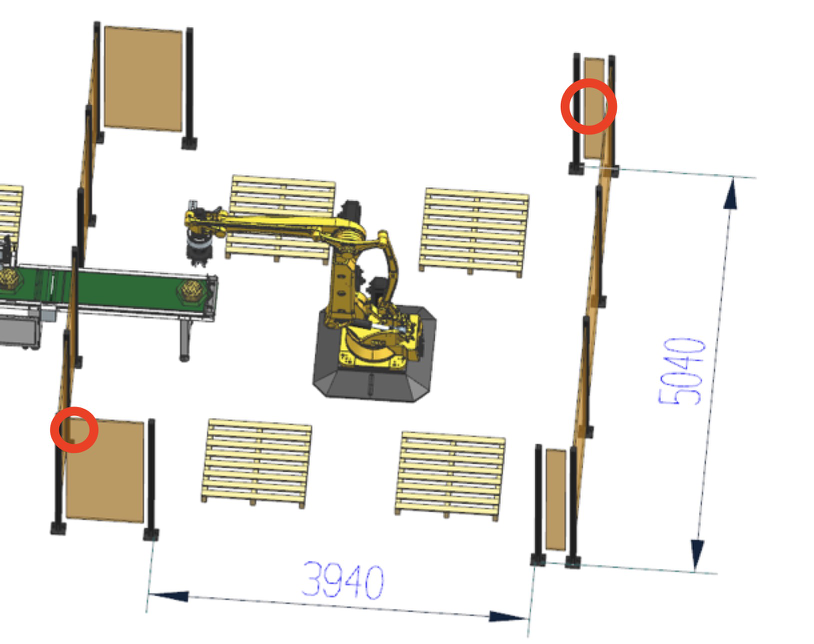
詳細介紹機場智能指路機器人的工作原理
免與行人發生碰撞,為旅客提供安全、舒適的引導服務。
智能交互系統
語音識別與理解 :智能指路機器人利用先進的語音識別技術,將旅客輸入的語音信號轉化為文字信息。然后,通過自然語言處理算法對文字進行分析
2025-05-10 18:26:31
深圳哪里有復合機器人賣?富唯智能以全場景方案引領智造未來
,深圳企業如何選擇既能滿足柔性生產需求,又具備高性價比的復合機器人?本文將深度解析深圳市場現狀,并揭示富唯智能如何以技術硬實力與場景化服務脫穎而出。
2025-05-08 16:00:14502
502

【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
:
一、機器人視覺:從理論到實踐
第7章詳細介紹了ROS2在機器視覺領域的應用,涵蓋了相機標定、OpenCV集成、視覺巡線、二維碼識別以及深度學習目標檢測等內容。通過學習,我認識到:
相機標定的重要性
2025-05-03 19:41:47
智能投遞機器人為什么采用鋁型材質?揭秘輕量化時代的效率革命
智能投遞機器人為什么采用鋁型材質?答案不僅是技術選擇,更是對效率、靈活性與可持續未來的深度洞察。富唯智能以鋁為翼,賦能機器人突破物理邊界,讓每一次投遞都成為智能制造的創新注腳。
2025-04-28 16:17:28440
440
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
的知識,還需要對ROS 2的節點通信和數據處理有一定的了解。通過實踐這一部分內容,我掌握了如何在ROS 2中實現二維碼識別,這對于提高機器人的智能性和交互性具有重要意義。
地圖構建:SLAM技術
2025-04-27 11:42:22
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
《ROS 2智能機器人開發實踐》內容閱讀初體驗
《ROS 2 智能機器人開發實踐》是一本針對 ROS 2(Robot Operating System 2)這一先進機器人開發框架的實用指南。隨著
2025-04-27 11:24:32
黑芝麻智能發布行業首創的安全智能底座
近日,在全球矚目的2025上海國際車展上,黑芝麻智能正式發布行業首創的安全智能底座,基于其武當C1200家族跨域融合芯片打造。安全智能底座的發布標志著智能汽車從“艙駕一體”向“安全+算力擴展”的跨越式升級,為全球汽車行業提供了兼顧安全性與靈活性的全新范式。
2025-04-27 11:08:591250
1250機器人主控芯片平臺有哪些 機器人主控芯片一文搞懂
AI芯片在人形機器人中的應用越來越廣泛。這些AI芯片專門設計用于執行人工智能算法,如深度學習、機器學習等。
2025-04-25 16:26:246482
6482
AI賦能安全調度系統:智能升級與功能躍遷
安全調度系統 通過AI技術的深度整合,實現了從傳統監控到智能決策的質變升級。這種智能化轉型不僅提升了系統的響應速度和處理精度,更重塑了整個安全管理的運行范式。以下是古河云科技AI技術為安全調度系統
2025-04-24 12:02:49569
569高安全低功耗MCU:機器人控制系統的智能化與可靠性提升
性。在機器人不斷向更復雜、更智能的方向發展的當下,對控制系統的性能要求也在成倍提升。高安全性和低功耗成為了機器人控制系統中至關重要的兩個關鍵指標。廈門國科安芯科技有限公司推出的基于32位RISC-V指令集的AS32A601 MCU,以
2025-04-20 15:13:18850
850EtherCAT轉Modbus TCP:機器人產業的“語言”之困
在智能制造與工業4.0的浪潮下,機器人技術正以驚人的速度滲透到汽車制造、電子裝配、物流倉儲等各個領域。 疆鴻智能JH-ECT003 就很好的解決了這一難題 典型應用場景:讓機器人“聽得懂、聯得
2025-04-18 15:18:12436
436
大象機器人推出myCobot 280 RDK X5,攜手地瓜機器人共建智能教育機
摘要大象機器人全新推出輕量級高性能教育機械臂myCobot280RDKX5,該產品集成地瓜機器人RDKX5開發者套件,深度整合雙方在硬件研發與智能計算領域的技術優勢,實現芯片架構、軟件算法、硬件結構
2025-04-15 22:05:051185
1185
ESP32-C3FH4:高性能物聯網芯片的卓越之選,智能門鎖安防等應用
產品概述ESP32-C3FH4是樂鑫科技推出的新一代RISC-V架構物聯網Wi-Fi/藍牙雙模芯片,專為物聯網設備設計,集高性能、低功耗與高安全性于一體,是智能家居、工業控制、消費電子等領域的理想
2025-04-03 11:41:35
嵌入式AI技術之深度學習:數據樣本預處理過程中使用合適的特征變換對深度學習的意義
? 作者:蘇勇Andrew 使用神經網絡實現機器學習,網絡的每個層都將對輸入的數據做一次抽象,多層神經網絡構成深度學習的框架,可以深度理解數據中所要表示的規律。從原理上看,使用深度學習幾乎可以描述
2025-04-02 18:21:391373
1373無人機園區巡檢系統為園區安全裝上智慧之眼
? ? ? ?無人機園區巡檢系統為園區安全裝上智慧之眼 ? ? ? ?工業園區是經濟發展的核心區域,但設備維護、環境監測、安全隱患排查等工作復雜且繁瑣。傳統人工巡檢依賴人力,存在效率低、覆蓋不全
2025-04-02 17:16:45657
657智造升級新引擎:具身智能工業機器人仿真軟件推薦與富唯智能的突圍之道
在工業4.0與智能制造深度融合的今天,企業對柔性生產、快速迭代的需求日益迫切。然而,傳統工業機器人因場景適應性差、調試周期長、研發成本高等問題,難以滿足動態市場的要求。如何通過具身智能工業機器人仿真
2025-04-02 15:29:441002
1002
從 “執行工具” 到 “智能伙伴”:工業機器人的 AI 進化之路
重新定義工業生產的可能性。富唯智能作為該領域的創新者,以自研的AI控制平臺與深度學習算法為核心,推動工業機器人從“機械臂”向“智能體”跨越,為企業提供更高效、更靈活的解決方案。
2025-03-31 15:00:07720
720
匯川技術機器人斬獲德國TUV功能安全認證
同時滿足安全控制系統“設計-驗證”全流程國際標準的企業。此次認證不僅彰顯了匯川工業機器人在功能安全領域的硬核實力,更標志著其安全技術體系全面接軌全球高端市場準入要求,為智能制造樹立“零風險”新標桿。
2025-03-28 17:40:211514
1514具身智能工業機器人路徑規劃算法成為破局關鍵
在工業4.0與智能制造深度融合的今天,傳統路徑規劃算法已難以滿足動態生產環境的需求。面對復雜場景下的高精度避障、實時決策與多任務協同挑戰,具身智能工業機器人路徑規劃算法成為破局關鍵。作為具身智能領域
2025-03-28 15:01:53844
844測斜儀:工程安全監測的智能之選
在數字化轉型浪潮中,YS-1A智能固定測斜儀正重新定義工程監測標準。這款融合物聯網技術的監測利器,已成功應用于多個重點項目,成為守護工程安全的"數字哨兵"。 智能監測 顛覆傳統 告別
2025-03-28 10:39:39
雨季邊坡安全告急?峟思滲壓計7×24小時智能預警
每年雨季,邊坡滑坡就像懸在工程人頭頂的"達摩克利斯之劍"。傳統人工巡檢效率低、風險高,而峟思埋入式滲壓計以全自動監測+智能預警的硬核實力,正在重塑邊坡安全防線。今天我們就和大家說清這款"工程安全哨兵
2025-03-26 16:16:48
如何讓人形機器人更智能、更安全?這家國產MCU廠商給出答案?
,人形機器人正處于高速增長的爆發期,智能化與安全性成為技術發展的核心方向,也是產業突破面臨的關鍵挑戰。? ? 在電子發燒友網《人形機器人的電機控制和傳感器》專題中,國民技術指出,人形機器人對芯片在高性能、低功耗、集成度、封裝尺寸、通信速度及安全性等多方面均有較
2025-03-25 00:13:002547
2547解碼“什么是具身智能工業機器人”
在工業4.0與人工智能深度融合的浪潮中,“什么是具身智能工業機器人”成為制造業智能化轉型的核心議題。作為具備自主感知、決策與執行能力的下一代工業設備,具身智能工業機器人不僅重新定義了生產效率,更將
2025-03-21 14:47:441772
1772
發那科機器人A型控制柜急停板安全回路接線方法
發那科機器人A型控制柜的安全回路接口涵蓋了外部急停輸入、安全門開關、機器人急停輸出以及伺服切斷等多個功能,這些接口均通過硬接線進行連接。在操作FANUC機器人時,必須啟用急停板安全回路,任何試圖用
2025-03-17 10:39:566099
6099
智能生活,觸手可及:第二屆生活機器人出口展全新啟航!
隨著科技的深度融入,人們的生活方式正加速邁向智能化、品質化與個性化的新階段。全球范圍內,各國紛紛加快智能科技布局,我國更是出臺多項政策扶持機器人產業發展,為生活機器人行業創造了良好的發展環境。在政策
2025-03-12 14:39:58883
883
PTR5415藍牙模組性能與場景應用深度解析
3.3mA,結合深度睡眠模式,適合電池供電設備。
尺寸與擴展性:13181.8mm超小封裝,32個GPIO全引出,支持定制化開發。
2、認證與可靠性
PSA3級認證:通過硬件級安全認證,保障固件
2025-03-11 16:03:40
名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發實踐
資格!
從 PC 到智能手機,下一個更大的計算平臺是什么?
最佳答案可能是 機器人 !
如果設想成真,則需要有人為機器人“造腦”,即打造適配的計算平臺及操作系統。
就像以計算機為平臺的計算機時代,和以
2025-03-03 14:18:22
成都華微與具身科技深化人工智能和機器人領域合作
近日,成都華微與四川具身人形機器人科技有限公司(具身科技)在成都高新區四川人工智能實驗室展開會談,雙方圍繞機器人智慧大腦與精密控制兩大關鍵核心方向展開交流,在芯片層面達成深度合作意向,攜手開啟人工智能與機器人技術創新融合新篇章。
2025-02-28 16:58:261034
1034中之杰智能德沃克OBF助推 人形機器人智造企業中大力德市值暴漲
的序幕。 在這場以"人形機器人"為關鍵詞的產業革命中,機器人零部件"上市企業"中大力德,憑借其核心減速器技術躋身全球人形機器人百強榜單,市值狂飆5倍。而在這家明星企業背后,一場由中之杰智能主導的"智造革命",正以德沃克OBF智能工廠為支點,重
2025-02-24 14:37:25574
574
具身智能工業機器人-打造智慧勞動力
在工業4.0與智能制造深度融合的今天,具身智能工業機器人正成為推動制造業升級的核心力量。作為富唯智能的核心產品,具身智能工業機器人基于具身認知理論(Embodied Intelligence),通過
2025-02-24 14:20:051241
1241SLAMTEC Aurora:把深度學習“卷”進機器人日常
在人工智能和機器人技術飛速發展的今天,深度學習與SLAM(同步定位與地圖構建)技術的結合,正引領著智能機器人行業邁向新的高度。最近科技圈頂流DeepSeek簡直殺瘋了!靠著逆天的深度學習能力,從AI聊天到圖像識別,分分鐘秀翻全場。
2025-02-19 15:49:05780
780軍事應用中深度學習的挑戰與機遇
,并廣泛介紹了深度學習在兩個主要軍事應用領域的應用:情報行動和自主平臺。最后,討論了相關的威脅、機遇、技術和實際困難。主要發現是,人工智能技術并非無所不能,需要謹慎應用,同時考慮到其局限性、網絡安全威脅以及
2025-02-14 11:15:34877
877中星微成功打造新一代智能視頻安全解決方案
近日,中星微技術宣布基于公共安全SVAC國家標準,通過深度融合DeepSeek大模型,成功打造新一代智能視頻安全解決方案落地樣本案例,實現“城市安全視圖智能體”落地多場景,以智能化運維開啟行業新范式,引領視頻安全行業智能化升級。
2025-02-13 16:47:591097
1097深度防御策略:構建USB安全防線的五大核心層次
在面對日益嚴重的USB安全威脅時,企業需通過深度防御策略構建多層安全防護,確保系統免受惡意軟件、數據泄露等風險的侵害。本文深入探討了五大核心防御層次,包括防病毒、USB設備控制、書面政策、數字版權管理和物理安全端口阻塞,幫助企業構建全面且高效的USB安全防線。
2025-02-10 14:51:03820
820薄之極致,智之巔峰:大核桃防爆手機,開啟工業安全的“智能次元”
輕薄的外觀設計、卓越的智能性能,引領工業安全進入全新的“智能次元”。?一、薄之極致,重塑工業手機新形態?提到工業手機,很多人腦海中浮現的往往是笨重、粗糙的形象。然
2025-02-07 15:22:49645
645
燧原科技AIGC生態破局算力之困
近日,“太湖智算·芯火燎原”AI產業生態大會在江蘇省無錫市順利召開,大會攜手“政、產、學、研、投”各方伙伴,共同探討人工智能領域的最新技術成果與未來發展趨勢。區領導顧國棟、李桂林、闕堯堯參加活動。
2025-01-15 14:27:471137
1137優锘科技攜手逐際動力,共創數字孿生與具身智能機器人新未來
近日,優锘科技與逐際動力正式宣布達成戰略合作,雙方將在業務和技術領域展開深度協作,共同探索數字孿生與具身智能機器人的融合應用。這一合作無疑將為智能科技領域注入全新動力,推動行業智能化轉型邁向更高水平。
2025-01-09 15:34:53747
747- 設計技術
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術
- 測量儀表
- 嵌入式技術
- 制造/封裝
- 模擬技術
- RF/無線
- 接口/總線/驅動
- 處理器/DSP
- EDA/IC設計
- 存儲技術
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網絡
- 醫療電子
- 人工智能
- 虛擬現實
- 可穿戴設備
- 機器人
- 安全設備/系統
- 軍用/航空電子
- 移動通信
- 工業控制
- 便攜設備
- 觸控感測
- 物聯網
- 智能電網
- 區塊鏈
- 新科技
- 聯系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內容合作
- 張迎輝:mikezhang@elecfans.com
-
關注我們的微信

-
下載發燒友APP

-
電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1
評論