我不得不說(shuō)說(shuō)卡爾曼濾波,因?yàn)樗茏龅降氖虑楹?jiǎn)直讓人驚嘆!意外的是很少有軟件工程師和科學(xué)家對(duì)對(duì)它有所了解,這讓我感到沮喪,因?yàn)?b class="flag-6" style="color: red">卡爾曼濾波是一個(gè)如此強(qiáng)大的工具
2023-07-13 16:20:59 3532
3532 
卡爾曼濾波(KalmanFilter)是一種遞歸的、自適應(yīng)的濾波算法,廣泛應(yīng)用于估計(jì)系統(tǒng)狀態(tài)和觀測(cè)過(guò)程中的噪聲。它最初在1960年被提出,被認(rèn)為是控制理論和信號(hào)處理領(lǐng)域中最重要的發(fā)展之一。卡爾曼
2023-12-07 08:08:404773 
紅色是卡爾曼,藍(lán)色的是擴(kuò)展卡爾曼最后結(jié)論是互補(bǔ)【相應(yīng)速度】沒(méi)有卡爾曼快擴(kuò)展卡爾曼比卡爾曼【穩(wěn)定,抖動(dòng)小】附上一個(gè)C語(yǔ)言版本的卡爾曼濾波,有興趣的童鞋可以一起玩一下
2015-06-11 16:02:41
卡爾曼濾波的估計(jì)值能很好的逼近真實(shí)值,我的疑惑是,這和濾波有什么關(guān)系,請(qǐng)高手介紹下卡爾曼算法是如何濾波的?
2013-07-04 22:57:04
卡爾曼濾波的噪聲協(xié)方差怎么配置啊?
2017-08-01 10:05:29
卡爾曼濾波風(fēng)力發(fā)電機(jī)中的風(fēng)速估計(jì),轉(zhuǎn)速估計(jì)甚至扭矩估計(jì)都設(shè)計(jì)到卡爾曼濾波,如果只是單一傳感變量的平滑處理也能用到卡爾曼濾波。振動(dòng)信號(hào)中的濾波大多采用低通去除高頻噪音,而卡爾曼濾波則是通過(guò)不確定度把
2021-07-12 06:00:47
a往南向北 2019-01-16 20:39:20 11340 收藏 111分類專欄: C語(yǔ)言嵌入式 文章標(biāo)簽: 卡爾曼濾波 C代碼卡爾曼濾波理論很容易就可以在MATLAB軟件環(huán)境下實(shí)現(xiàn),但是,實(shí)際
2021-08-17 09:10:43
卡爾曼濾波器介紹
2016-08-17 12:06:34
卡爾曼濾波器介紹卡爾曼濾波器介紹Greg Welch1and Gary Bishop2TR 95-041Department of Computer ScienceUniversity
2008-07-14 13:06:49
一、前言卡爾曼濾波器是一種最優(yōu)線性狀態(tài)估計(jì)方法(等價(jià)于“在最小均方誤差準(zhǔn)則下的最佳線性濾波器”),所謂狀態(tài)估計(jì)就是通過(guò)數(shù)學(xué)方法尋求與觀測(cè)數(shù)據(jù)最佳擬合的狀態(tài)向量。在移動(dòng)機(jī)器人導(dǎo)航方面,卡爾曼濾波是最常
2021-11-16 09:10:40
[開(kāi)發(fā)工具] STM32算法的翅膀之MATLAB基于加速度計(jì)與氣壓計(jì)的三階卡爾曼濾波計(jì)算加速度、速度及高度主要介紹了卡爾曼濾波器的使用原理,給出了matlab代碼,并在STM32F407平臺(tái)對(duì)卡爾曼濾波器進(jìn)行了驗(yàn)證,傳感器為MPU6050與DPS310,測(cè)試結(jié)果令人滿意,速度與高度無(wú)累積...
2021-08-17 07:02:07
卡爾曼濾波器通俗講解
2016-08-17 12:06:59
請(qǐng)問(wèn)卡爾曼濾波在labview中如何實(shí)現(xiàn)
2012-12-11 17:53:19
卡爾曼濾波在信號(hào)處理方面用的是比較多的,資料也是非常多的,這里就不寫了。自適應(yīng)卡爾曼濾波也有很多文獻(xiàn)有相關(guān)的介紹,其中用的比較多的有基于Sage-Husa算法實(shí)現(xiàn)的。這段時(shí)間剛好用到,順便做了一個(gè)
2021-08-18 06:49:31
卡爾曼濾波器是屬于一個(gè)高通濾波器還是帶通濾波器
2023-10-11 06:58:07
想寫一個(gè)卡爾曼濾波程序,目前依照網(wǎng)上的說(shuō)法寫的總是不成功,哪位有經(jīng)驗(yàn)的請(qǐng)指教一下,感激不盡,我是在labview編程環(huán)境下嘗試的
2017-05-21 20:18:08
卡爾曼濾波的原理和實(shí)現(xiàn)
2020-06-01 17:28:24
編論文有興趣,可以到這里的地址下載: http://www.cs.unc.edu/~welch/kalman/media/pdf/Kalman1960.pdf簡(jiǎn)單來(lái)說(shuō),卡爾曼濾波器是一個(gè)
2016-09-21 11:41:07
卡爾曼濾波的基本原理及應(yīng)用
2020-05-05 09:26:15
在陀螺儀和加速度計(jì)中使用卡爾曼濾波static float P[2][2] = {{ 1, 0 }, { 0, 1 }};//協(xié)方差矩陣P的兩列代表陀螺儀、加速度計(jì)兩維,那兩行代表什么呢?為什么P的數(shù)組元素是{{ 1, 0 }, { 0, 1 }}而不是其他值?
2013-11-04 21:06:10
在這里我就不介紹卡爾曼的數(shù)學(xué)推算了,網(wǎng)上的數(shù)學(xué)推導(dǎo)一抓一大把,如果想了解推導(dǎo)過(guò)程的小伙伴可以去大佬的博客。如果你是想直接簡(jiǎn)單運(yùn)用卡爾曼濾波來(lái)處理mpu6050的數(shù)據(jù),或者是處理ADC的數(shù)據(jù),那么我
2022-02-28 14:24:57
已知測(cè)量值和原始值,但測(cè)量噪聲和觀測(cè)噪聲未知,如何進(jìn)行卡爾曼濾波。之前看了好像可以用自適應(yīng)卡爾曼,但不是很懂,求例子,最好有注釋的
2017-03-23 19:12:17
卡爾曼濾波算法對(duì)比其他的濾波算法有什么優(yōu)點(diǎn)
2023-10-11 06:42:24
請(qǐng)問(wèn),為什么在卡爾曼濾波器模型中,要大R 小Q,原因是什么?圖1 R = 5000 * eye(2);Q = eye(6);圖2 R = 500 * eye(2); Q = eye(6);請(qǐng)問(wèn)哪種情況追蹤效果好?
2016-05-12 18:02:53
有偏卡爾曼濾波器可以用來(lái)消除無(wú)線定位中的非視距誤差,首次使用有偏卡爾曼濾波器的參考文獻(xiàn)是下面兩篇論文[1]劉琚,李靜.一種在非視距環(huán)境中的TDOA/AOA混合定位方法[J].通信學(xué)報(bào),2005,26
2011-11-07 13:55:15
最近正在學(xué)習(xí)卡爾曼濾波算法,用LabVIEW仿照C語(yǔ)言寫了個(gè)一維的卡爾曼濾波程序,不知寫的對(duì)不對(duì),發(fā)上來(lái)希望大家指正。
2017-10-21 21:15:50
最近一直被卡爾曼濾波困擾,希望哪位研究這方面的朋友能夠指點(diǎn)一下,不要太多理論數(shù)學(xué),基本思路加上一定的代碼就好,萬(wàn)分感謝
2013-10-26 17:29:46
labview中,去哪下載卡爾曼濾波器工具包,能給個(gè)網(wǎng)址么?謝謝了~~~~~
2013-12-16 15:44:09
什么是卡爾曼濾波?具有哪些參數(shù)?
2021-09-30 08:50:30
網(wǎng)上搜到一篇關(guān)于卡爾曼濾波算法的論文,對(duì)低維卡爾曼濾波算法作了幾何解釋,這種解釋對(duì)卡爾曼濾波有一種直觀的理解,使人們對(duì)卡爾曼濾波有更本質(zhì)的認(rèn)識(shí)。有需要的童鞋帶走吧
2015-06-11 15:28:33
如何改進(jìn)基于Sage-Husa的自適應(yīng)卡爾曼濾波?
2021-11-22 07:35:35
卡爾曼濾波有什么用,怎么用?電調(diào)有什么用?小白,剛接觸四軸不懂。求大神解答
2019-04-18 01:12:59
離散卡爾曼濾波器1960年,卡爾曼發(fā)表了他著名的用遞歸方法解決離散數(shù)據(jù)線性濾波問(wèn)題的論文[Kalman60] 。從那以后,得益于數(shù)字計(jì)算技術(shù)的進(jìn)步,卡爾曼濾波器已成為推廣
2008-07-14 13:03:57 0
0 為了有效防止捷聯(lián)慣導(dǎo)系統(tǒng)濾波發(fā)散,本文從卡爾曼濾波原理出發(fā),介紹了漸消卡爾曼濾波原理、遺忘因子等內(nèi)容,通過(guò)對(duì)漸消因子的推導(dǎo)及計(jì)算機(jī)仿真,給出了常規(guī)卡爾曼濾波器
2009-05-30 08:49:5324 本文首先分析了當(dāng)前入侵檢測(cè)系統(tǒng)中存在的不足,指出了將卡爾曼濾波器應(yīng)用在入侵檢測(cè)系統(tǒng)的好處,并且詳細(xì)介紹了信號(hào)處理和卡爾曼濾波理論,接下來(lái)又給出了一個(gè)基于卡爾曼
2009-08-06 08:38:3232 卡爾曼濾波在通信、雷達(dá)、導(dǎo)航、自動(dòng)控制等領(lǐng)域有廣泛的應(yīng)用,它是最佳估計(jì)并且可以進(jìn)行遞推運(yùn)算,本文從工程應(yīng)用的角度出發(fā),根據(jù)卡爾曼濾波在雷達(dá)數(shù)據(jù)處理中的應(yīng)用,
2009-09-22 11:28:2392 matlab卡爾曼濾波程序:main 是主函數(shù)! 運(yùn)行即可p184是一個(gè)示意圖! 另外兩個(gè)文件是濾波模型
2010-02-08 13:02:0656 卡爾曼濾波程序:% kalman filtering
load initial_track s; % y:initial data,s:data with noiseT=0.1
2010-02-08 16:29:17120 卡爾曼濾波與組合導(dǎo)航技術(shù)基礎(chǔ)
所謂濾波就是從混合在一起的諸多信號(hào)中提取出所需要的信號(hào)。
2010-02-25 09:43:280 卡爾曼濾波 算法具有收斂平穩(wěn)、速度快、精度高的優(yōu)點(diǎn),在信號(hào)處理中受到廣泛應(yīng)用。但由于卡爾曼濾波算法不僅是一種迭代算法,而且還包含矩陣的連乘運(yùn)算和求逆運(yùn)算,這使得該算
2011-06-14 16:36:400 卡爾曼濾波在陀螺儀隨機(jī)漂移中的應(yīng)用
2013-09-25 16:08:0365 很通俗易懂的 卡爾曼濾波原理 由淺入深不光是公式的介紹
2015-12-08 18:13:4438 這是關(guān)于卡爾曼濾波的一份相當(dāng)不錯(cuò)的資料,詳細(xì)的剖析了卡爾曼濾波原理
2015-12-15 14:19:3360 用溫度控制的例子介紹卡爾曼濾波的原理,很通俗,同意理解
2016-01-15 15:44:106 這是關(guān)于卡爾曼濾波的原理說(shuō)明(通俗易懂),適合初學(xué)者
2016-03-16 14:40:530 卡爾曼濾波的學(xué)習(xí)與應(yīng)用。
2016-04-13 15:15:387 MPU6050使用卡爾曼濾波的方法介紹,使用卡爾曼濾波獲得的姿態(tài)角更準(zhǔn)確
2016-06-01 11:29:200 介紹卡爾曼濾波器及其各種衍生方法。首先給出卡爾曼濾波器的算法流程以及所有參數(shù)的含義,并對(duì)影響濾波效果的
五個(gè)主要參數(shù)進(jìn)行了討論。然后通過(guò)仿真實(shí)驗(yàn)研究不同的參數(shù)取值對(duì)于卡爾曼濾波的影響。最后總結(jié)在不同應(yīng)用場(chǎng)景下使用卡爾
曼濾波器的宗旨和要點(diǎn)。
2016-06-21 17:56:396 卡爾曼濾波講解,感興趣的小伙伴們可以瞧一瞧。
2016-08-23 17:56:0014 卡爾曼濾波算法
2016-12-17 17:22:2253 卡爾曼濾波的一些精華
2017-05-24 08:43:429 卡爾曼濾波理論英文文獻(xiàn)
2017-06-21 14:39:4520 MPU6050 卡爾曼濾波器設(shè)計(jì)
2017-06-23 10:51:5441 卡爾曼濾波器是一種由卡爾曼(Kalman)提出的用于時(shí)變線性系統(tǒng)的遞歸濾波器。這個(gè)系統(tǒng)可用包含正交狀態(tài)變量的微分方程模型來(lái)描述,這種濾波器是將過(guò)去的測(cè)量估計(jì)誤差合并到新的測(cè)量誤差中來(lái)估計(jì)將來(lái)的誤差。
2018-02-07 18:06:465051 
本文開(kāi)始闡述了卡爾曼濾波的概念,其次闡述了卡爾曼濾波的性質(zhì)與卡爾曼濾波的應(yīng)用,最后介紹了mpu6050卡爾曼濾波分析及mpu6050卡爾曼濾波輸出姿態(tài)角程序。
2018-03-09 08:57:3176219 
本文檔的主要內(nèi)容詳細(xì)介紹的是多旋翼飛行器的可觀性和卡爾曼濾波教程詳細(xì)說(shuō)明包括了:1.可觀性 2.卡爾曼濾波 3.多速率采樣卡爾曼濾波 4.擴(kuò)展卡爾曼濾波 5.應(yīng)用實(shí)例 6.總結(jié)
2019-10-31 08:00:001 本文檔的主要內(nèi)容詳細(xì)介紹的是幾種最優(yōu)估計(jì)和卡爾曼濾波原理的學(xué)習(xí)課件免費(fèi)下載包括了:1 卡爾曼濾波與最優(yōu)估計(jì) ,2 卡爾曼濾波方程 ,3 連續(xù)系統(tǒng)的卡爾曼濾波方程,4 連續(xù)—離散系統(tǒng)卡爾曼濾波方程 ,5 卡爾曼濾波在組合導(dǎo)航中的應(yīng)用方式 ,6 非線性系統(tǒng)的卡爾曼濾波
2020-05-09 08:00:0022 不好意思,由于工作繁忙和文章不好組織的原因,拖了 2 個(gè)星期才更新。這一章要系統(tǒng)地去解釋卡爾曼濾波,這個(gè)解釋應(yīng)該是網(wǎng)上所有文章里面寫得最兼顧詳細(xì)和易懂的,但是卡爾曼濾波還是一個(gè)比較系統(tǒng)的工程,需要讀者具備一定的耐心。
2020-08-11 08:00:000 在視頻圖像獲取過(guò)程中“由于噪聲對(duì)圖像序列的降質(zhì)”需要設(shè)計(jì)實(shí)時(shí)噪聲濾波器。討論了視頻圖像的卡爾曼濾波問(wèn)題及自適應(yīng)卡爾曼濾波算法“并討論了自適應(yīng)卡爾曼濾波算法的簡(jiǎn)化”以利于硬件實(shí)現(xiàn)自適應(yīng)卡爾曼濾波器“并進(jìn)行了簡(jiǎn)化算法仿真”完成基于FPGA實(shí)現(xiàn)的實(shí)時(shí)自適應(yīng)卡爾曼濾波器的設(shè)計(jì)。
2021-01-22 14:29:2922 在視頻圖像獲取過(guò)程中“由于噪聲對(duì)圖像序列的降質(zhì)”需要設(shè)計(jì)實(shí)時(shí)噪聲濾波器。討論了視頻圖像的卡爾曼濾波問(wèn)題及自適應(yīng)卡爾曼濾波算法“并討論了自適應(yīng)卡爾曼濾波算法的簡(jiǎn)化”以利于硬件實(shí)現(xiàn)自適應(yīng)卡爾曼濾波器“并進(jìn)行了簡(jiǎn)化算法仿真”完成基于FPGA實(shí)現(xiàn)的實(shí)時(shí)自適應(yīng)卡爾曼濾波器的設(shè)計(jì)。
2021-01-22 14:29:2914 基于卡爾曼濾波器的PID設(shè)計(jì)教程
2021-06-03 10:27:4139 基于卡爾曼濾波的兩輪平衡檢測(cè)系統(tǒng)
2021-07-01 15:58:1616 簡(jiǎn)述卡爾曼濾波在被動(dòng)目標(biāo)跟蹤系統(tǒng)中的應(yīng)用
2021-10-18 10:11:180 卡爾曼濾波器及其應(yīng)用基礎(chǔ).敬喜編
2021-10-18 10:14:570 卡爾曼濾波器是一種基礎(chǔ)預(yù)測(cè)定位算法。原理非常簡(jiǎn)單易懂。
2022-03-21 13:47:476801 卡爾曼濾波原理及應(yīng)用-黃小平
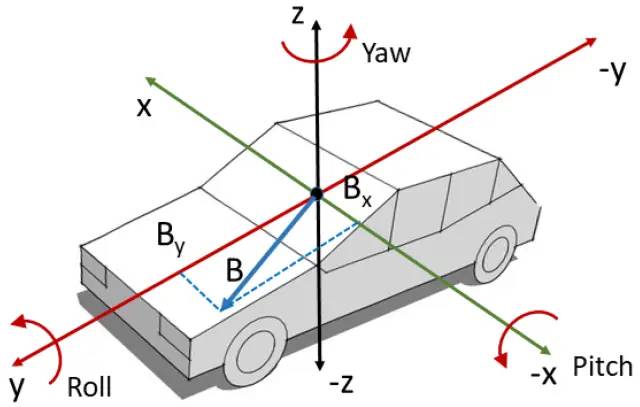
2022-06-09 14:37:230 理論應(yīng)用到非線性系統(tǒng)的擴(kuò)展卡爾曼算法 Extended Kalman Filter(EKF)[2]。相比于線性卡爾曼濾波器,擴(kuò)展卡爾曼濾波器有更廣的適用范圍[3, 4],更高的狀態(tài)估計(jì)精度,可以處理任意更新頻率的系統(tǒng)。 有了上文的基礎(chǔ),這里,我們將通過(guò)一個(gè)二維小車的例子并來(lái)介紹擴(kuò)展卡爾曼濾波的原理。
2022-08-12 10:06:327093 
你可以在任何含有不確定信息的動(dòng)態(tài)系統(tǒng)中使用卡爾曼濾波,對(duì)系統(tǒng)下一步的走向做出有根據(jù)的預(yù)測(cè),即使伴隨著各種干擾,卡爾曼濾波總是能指出真實(shí)發(fā)生的情況。
2022-09-30 09:19:421510 卡爾曼濾波的最終輸出是,真實(shí)的狀態(tài)為,令 對(duì)誤差的平方求最小值,同樣可以推導(dǎo)出公式(1-5)到公式(1-7)。因此卡爾曼濾波器也是系統(tǒng)狀態(tài)的最優(yōu)估計(jì)。
2022-12-15 10:45:134485 **卡爾曼濾波**自從1960被Kalman發(fā)明并應(yīng)用到阿波羅登月計(jì)劃之后一直經(jīng)久不衰,直到現(xiàn)在也被機(jī)器人、自動(dòng)駕駛、飛行控制等領(lǐng)域應(yīng)用。基礎(chǔ)卡爾曼濾波只能對(duì)線性系統(tǒng)建模;擴(kuò)展卡爾曼濾波對(duì)非線性方程做線性近似以便將卡爾曼濾波應(yīng)用到非線性系統(tǒng)。
2023-02-13 10:03:321381 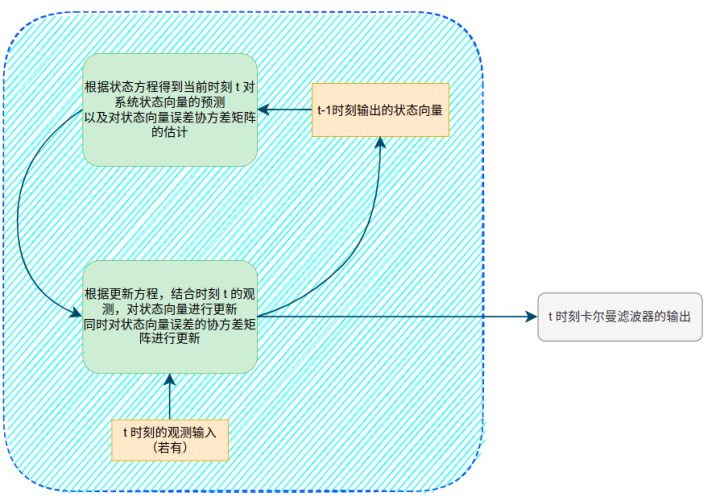
**卡爾曼濾波**自從1960被Kalman發(fā)明并應(yīng)用到阿波羅登月計(jì)劃之后一直經(jīng)久不衰,直到現(xiàn)在也被機(jī)器人、自動(dòng)駕駛、飛行控制等領(lǐng)域應(yīng)用。基礎(chǔ)卡爾曼濾波只能對(duì)線性系統(tǒng)建模;擴(kuò)展卡爾曼濾波對(duì)非線性方程做線性近似以便將卡爾曼濾波應(yīng)用到非線性系統(tǒng)。
2023-02-13 10:05:401460 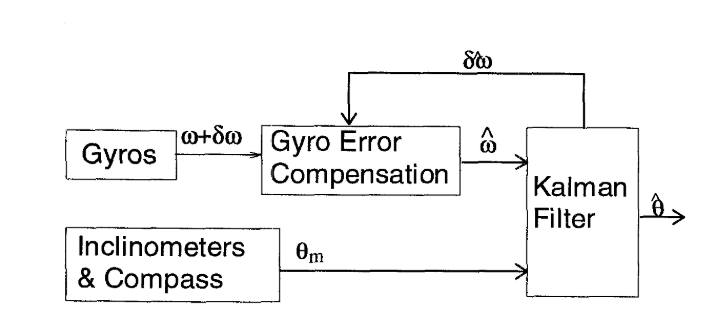
**卡爾曼濾波**自從1960被Kalman發(fā)明并應(yīng)用到阿波羅登月計(jì)劃之后一直經(jīng)久不衰,直到現(xiàn)在也被機(jī)器人、自動(dòng)駕駛、飛行控制等領(lǐng)域應(yīng)用。基礎(chǔ)卡爾曼濾波只能對(duì)線性系統(tǒng)建模;擴(kuò)展卡爾曼濾波對(duì)非線性方程做線性近似以便將卡爾曼濾波應(yīng)用到非線性系統(tǒng)。
2023-02-13 10:05:571671 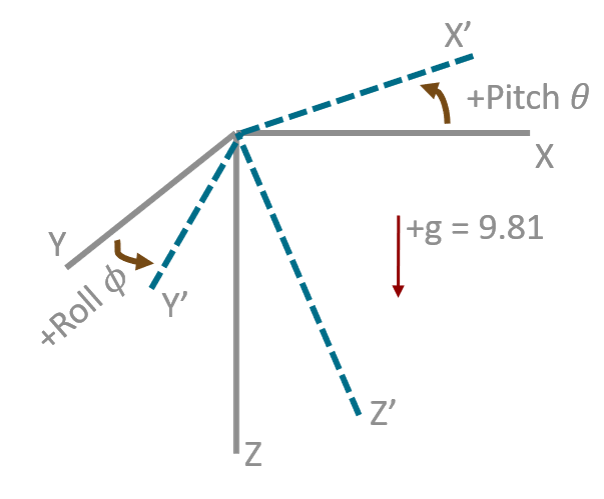
卡爾曼濾波實(shí)質(zhì)上就是基于觀測(cè)值以及估計(jì)值二者的數(shù)據(jù)對(duì)真實(shí)值進(jìn)行估計(jì)的過(guò)程。
2023-02-16 09:47:031860 卡爾曼濾波是一種高效率的遞歸濾波器(自回歸濾波器), 它能夠從一系列的不完全包含噪聲的測(cè)量(英文:measurement)中,估計(jì)動(dòng)態(tài)系統(tǒng)的狀態(tài),然而簡(jiǎn)單的卡爾曼濾波必須應(yīng)用在符合高斯分布的系統(tǒng)中
2023-05-10 17:51:066 你可以在任何含有不確定信息的動(dòng)態(tài)系統(tǒng)中使用卡爾曼濾波,對(duì)系統(tǒng)下一步的走向做出有根據(jù)的預(yù)測(cè),即使伴隨著各種干擾,卡爾曼濾波總是能指出真實(shí)發(fā)生的情況。
2023-06-01 09:56:053040 
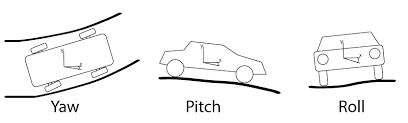
在 飛行器姿態(tài)計(jì)算 中,卡爾曼濾波是最常用的姿態(tài)計(jì)算方法之一。今天就以目前的理解講以下卡爾曼濾波。
2023-06-14 10:44:562917 電子發(fā)燒友網(wǎng)站提供《用于定位的實(shí)用卡爾曼濾波器.zip》資料免費(fèi)下載
2023-06-16 10:07:350 一、什么是卡爾曼濾波? 你可以在任何含有不確定信息的動(dòng)態(tài)系統(tǒng)中使用卡爾曼濾波,對(duì)系統(tǒng)下一步的走向做出有根據(jù)的預(yù)測(cè),即使伴隨著各種干擾,卡爾曼濾波總是能指出真實(shí)發(fā)生的情況。 在連續(xù)變化的系統(tǒng)中使用卡爾
2023-08-08 09:39:518952 
卡爾曼濾波是一種用于估算線性動(dòng)態(tài)系統(tǒng)狀態(tài)的優(yōu)化算法,其基礎(chǔ)數(shù)學(xué)理論為貝葉斯定理,將傳感器測(cè)量值和系統(tǒng)模型的預(yù)測(cè)值進(jìn)行融合,得到對(duì)系統(tǒng)狀態(tài)的估計(jì)。貝葉斯定理是基于條件概率的公式,用于計(jì)算給定某些證據(jù)
2023-08-30 10:18:101559 
卡爾曼濾波是一種用于估算線性動(dòng)態(tài)系統(tǒng)狀態(tài)的優(yōu)化算法,其基礎(chǔ)數(shù)學(xué)理論為貝葉斯定理,將傳感器測(cè)量值和系統(tǒng)模型的預(yù)測(cè)值進(jìn)行融合,得到對(duì)系統(tǒng)狀態(tài)的估計(jì)。
2023-08-30 10:18:353268 卡爾曼濾波是一種估計(jì)和預(yù)測(cè)系統(tǒng)狀態(tài)的方法,通過(guò)將測(cè)量數(shù)據(jù)和系統(tǒng)模型結(jié)合,實(shí)現(xiàn)對(duì)系統(tǒng)狀態(tài)的最優(yōu)估計(jì)。它在控制、通信、導(dǎo)航等領(lǐng)域具有廣泛應(yīng)用。 卡爾曼濾波的核心思想是利用系統(tǒng)的動(dòng)態(tài)方程和測(cè)量方程來(lái)
2023-12-07 11:18:0411239 本文對(duì)于擴(kuò)展卡爾曼濾波、無(wú)跡卡爾曼濾波僅僅做了一些簡(jiǎn)要介紹,不再想上次的文章那樣做詳細(xì)地推導(dǎo)了。但只要看過(guò)之前寫的卡爾曼濾波,相信這篇文章對(duì)于你來(lái)說(shuō)也是很好理解的。
2024-01-14 14:29:412062 
卡爾曼濾波(Kalman Filter)是一種用于估計(jì)狀態(tài)的算法,最初由R.E. Kalman在1960年提出。它是一種線性高斯濾波器,常用于處理包含誤差噪聲的動(dòng)態(tài)系統(tǒng)。卡爾曼濾波算法通過(guò)組合測(cè)量
2024-01-17 10:51:514983 卡爾曼濾波(Kalman Filter)是一種線性動(dòng)態(tài)系統(tǒng)的狀態(tài)估計(jì)算法,廣泛應(yīng)用于信號(hào)處理、導(dǎo)航、控制等領(lǐng)域。 卡爾曼濾波的優(yōu)點(diǎn) 1.1 高效性 卡爾曼濾波是一種遞歸算法,可以在實(shí)時(shí)系統(tǒng)中高
2024-08-01 15:24:355438 我們前一篇關(guān)于人物識(shí)別跟蹤的文章《視頻連續(xù)目標(biāo)跟蹤實(shí)現(xiàn)的兩種方法和示例(更新)》里講到,視頻圖像中物體的識(shí)別和跟蹤用到了卡爾曼濾波器(KF)。這里對(duì)這個(gè)話題我們稍微對(duì)這個(gè)卡爾曼濾波器進(jìn)行一個(gè)整理。
2024-11-04 11:36:341504 
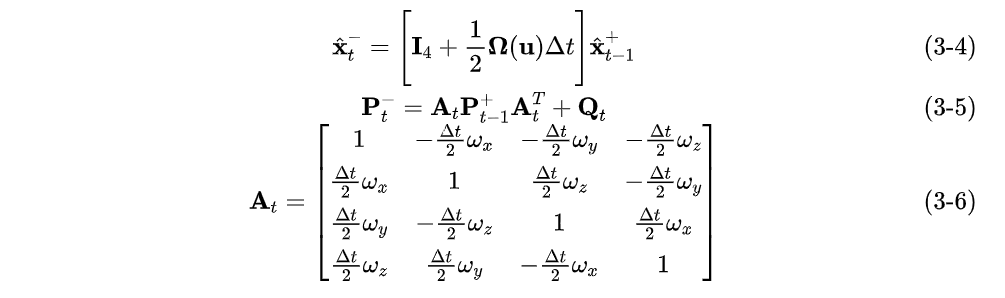
卡爾曼濾波的基本原理 卡爾曼濾波是一種基于貝葉斯濾波的算法,它通過(guò)結(jié)合預(yù)測(cè)和更新兩個(gè)步驟來(lái)估計(jì)系統(tǒng)的狀態(tài)。算法的核心在于最小化估計(jì)誤差的方差,從而提供最優(yōu)的狀態(tài)估計(jì)。 預(yù)測(cè)步驟 :基于系統(tǒng)的動(dòng)態(tài)模型
2024-12-16 09:08:371890 卡爾曼濾波在圖像處理中的應(yīng)用實(shí)例 卡爾曼濾波在圖像處理中主要應(yīng)用于目標(biāo)跟蹤、噪聲消除和圖像恢復(fù)等方面。以下是一些具體的應(yīng)用實(shí)例: 目標(biāo)跟蹤 : 通過(guò)跟蹤圖像中的目標(biāo),卡爾曼濾波可以實(shí)現(xiàn)目標(biāo)的位置
2024-12-16 09:11:202654 卡爾曼濾波在信號(hào)處理中的應(yīng)用十分廣泛,其強(qiáng)大的濾波和預(yù)測(cè)能力使其成為信號(hào)處理領(lǐng)域的一種重要工具。以下是對(duì)卡爾曼濾波在信號(hào)處理中應(yīng)用的分析: 一、卡爾曼濾波的基本原理 卡爾曼濾波是一種遞歸估計(jì)
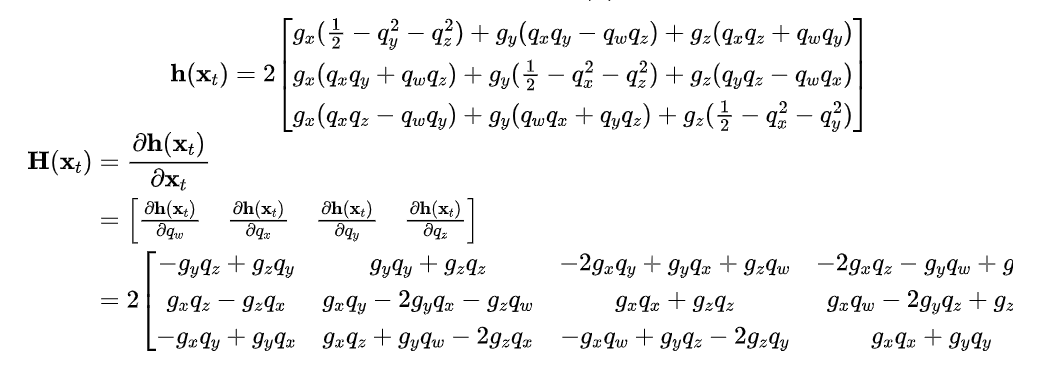
2024-12-16 09:14:234121 ,給出當(dāng)前狀態(tài)的最優(yōu)估計(jì),該算法涉及的核心方程有: 其中,xt為系統(tǒng)狀態(tài)矩陣;zt為系統(tǒng)觀測(cè)矩陣(實(shí)驗(yàn)結(jié)果);A為狀態(tài)轉(zhuǎn)移矩陣;B為控制輸入矩陣;H為狀態(tài)觀測(cè)矩陣。 附2、卡爾曼濾波應(yīng)用實(shí)例? 本部分通過(guò)簡(jiǎn)單的算例,介紹了
2025-01-08 10:26:252157 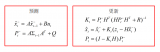
 電子發(fā)燒友App
電子發(fā)燒友App













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論