本文主要目的就是設(shè)計一種基于DSP的模塊化教育機器人硬件系統(tǒng)。該教育機器人是以只能小車為載體TMS320LF2407A微控制器的嵌入式控制平臺及編輯環(huán)境的一款開放式的機器人控制系統(tǒng),以各傳感器模塊
2014-05-14 09:47:40 6004
6004 。Automatica是世界上最先將機器人技術(shù)和自動化技術(shù)作為獨立項目在一起展出的專業(yè)博覽會,旨在展示整個機器人自動化行業(yè)附加值產(chǎn)業(yè)鏈。展會由德國機械制造協(xié)會、機器人與自動化部傾力贊助和支持,參展商
2015-10-15 16:32:07
請各位大神指導(dǎo),移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉(zhuǎn)移的?
2016-07-26 13:33:14
一般機器人系統(tǒng)由機械手、環(huán)境、任務(wù)和控制器四個互相作用的部分組成。我們稱一般安裝在機器人機械手上的傳感器為內(nèi)傳感器(Inner Sensons),而稱作為環(huán)境的一部分的傳感器為外傳
2021-09-16 08:45:39
機器人的運動原理還是屬于最基本的簡單機械。機器人運動主要是依靠什么裝置?有些什么裝置是機器人用的比較多的?
2015-02-03 11:22:01
的切換和機器人動作軌跡的調(diào)整, 更加柔性化。生產(chǎn)節(jié)拍:機器人線生產(chǎn)節(jié)拍為7 件/ min~10 件/ min, 機械手線為8件/ min~12 件/ min。投資成本:機器人線投資低, 機械手線投資高
2018-11-26 11:59:28
ZNRGZ-4機器人搬運碼垛工作站一、產(chǎn)品概述ZNRGZ-4機器人搬運碼垛工作站以工業(yè)機器人與機器視覺為核心,將機械、氣動、運動控制、PLC控制技術(shù)有機地進行整合,結(jié)構(gòu)模塊化,便于組合,實現(xiàn)
2021-07-01 08:20:18
的機器。一些書呆子式的語言可能會把它描述成“一個可重新編程的多功能機械手,旨在通過各種編程的動作移動材料、部件、工具或?qū)iT設(shè)備,以完成各種任務(wù)”。這個定義非常具有表現(xiàn)力。那么制造機器人的要素是什么呢
2022-03-31 10:31:31
機器人的定義是什么?機器人優(yōu)點和缺點是什么?機器人是由哪些部分組成的?工業(yè)機器人的應(yīng)用有哪些?
2021-07-05 06:48:21
` 隨著科技的發(fā)展,很多行業(yè)開始向自動化技術(shù)轉(zhuǎn)變。以前很多加工制造的工作都是由大量的人手來完成,現(xiàn)在則用機械手、機器人等一些自動化設(shè)備來代替。 作為近幾十年發(fā)展起來的一種高科技自動化生產(chǎn)設(shè)備,工業(yè)
2012-09-21 09:33:00
模塊化嵌入式機器人控制單元設(shè)計,有需要的可以下載。
2022-03-25 10:08:12
專業(yè)ABB機器人控制柜報警數(shù)據(jù)恢復(fù)維修:1、剎車檢查正常運行前,需檢查電機剎車每個軸的電機 剎車檢查方法如下:(1)運行每個機械手的軸到它負載*大的位置。(2)機器人控制器上的電機模式選擇開關(guān)打到
2020-09-18 16:56:53
KUKA庫卡C4機器人驅(qū)動器故障報警維修庫卡機器人維修內(nèi)容包括庫卡機器人示教器維修,KUKA伺服驅(qū)動模塊維修,庫卡機器人伺服電機維修,KUKA機械手PC工業(yè)電腦維修,庫卡機器人電路板維修,庫卡機器人
2021-09-17 07:09:52
ZN-980B機器人搬運碼垛工作站一、產(chǎn)品概述ZN-980B機器人搬運碼垛工作站以工業(yè)機器人與機器視覺為核心,將機械、氣動、運動控制、PLC控制技術(shù)有機地進行整合,結(jié)構(gòu)模塊化,便于組合,實現(xiàn)
2021-07-01 12:48:23
最近要學(xué)labview里的機器人模塊,但是找不到什么入門資料,大家有沒有啥資料推薦推薦的啊。。。
2012-11-08 21:47:14
【智能控制】機械手參數(shù)辨識實例——利用PSO和LS方法對Staubli rx - 60機器人進行動態(tài)識別.pdf
2018-01-11 22:21:12
【智能控制】機械手參數(shù)辨識實例——基于STAUBLIRX - 60理論的機器人建模與識別.pdf純英文學(xué)習(xí)資料。
2018-01-11 22:19:50
、伺服系統(tǒng)的參數(shù)調(diào)整與編程控制;工業(yè)機器人傳感器的檢測與應(yīng)用;人機界面編程與應(yīng)用。ZNH-DQ01工業(yè)機器人自動化綜合實訓(xùn)平臺為模塊化開放式設(shè)計結(jié)構(gòu),主模塊可作為獨立的實訓(xùn)系統(tǒng)單獨使用,也可通過標(biāo)準(zhǔn)接口與電工實操、電氣控制、氣動控制、伺服步進、傳感檢測、機械拆裝等子模塊組合,...
2021-07-01 06:48:14
`本人新帶技能大賽,有關(guān)單片機控制機械手模塊,剛接觸一點也不會,大賽迫在眉睫,有沒有會的大神幫忙設(shè)計一下程序及畫出模塊圖`
2016-04-24 10:11:44
清潔機器人是服務(wù)機器人的一種,所謂服務(wù)機器人是指自主或半自主的、從事非生產(chǎn)活動、能完成有益于人類健康的服務(wù)工作的機器人。家庭清潔機器人集機械、電子、傳感器、計算機、控制、機器入技術(shù)、人工智能等諸多
2019-09-05 06:56:37
` 本帖最后由 大連云港 于 2015-1-19 11:02 編輯
工業(yè)機器人是面向工業(yè)領(lǐng)域的多關(guān)節(jié)機械手或多自由度的機器人。工業(yè)機器人是自動執(zhí)行工作的機器裝置,是靠自身動力和控制能力來實現(xiàn)
2015-01-19 10:58:38
只需發(fā)送任務(wù),機器人即可自行完成任務(wù),云端自動更新倉庫信息。小型物流機器人系統(tǒng)可以單機或多機器人協(xié)同完成任務(wù),并可以方便的擴展,與現(xiàn)實的全自動化物流系統(tǒng)技術(shù)完全一致。 重要技術(shù)點:物聯(lián)網(wǎng),Zigbee,RFID,機械手,多線程
2016-04-05 15:16:07
`力泰科技資訊:數(shù)控車床機械手因其價格低、速度快、精度高、質(zhì)量好等優(yōu)點深受企業(yè)家的青睞,數(shù)控機床和桁架機器人共同構(gòu)造成一個柔性單元可以節(jié)省龐大的工件輸送裝置,而且桁架機械手結(jié)構(gòu)簡單,適用性強。第一次
2018-08-08 14:34:35
我今年大一計算機專業(yè) 想做那種清理垃圾機器人帶機械手臂的。。正在放寒假想學(xué)點東西準(zhǔn)備一下但網(wǎng)上說的太籠統(tǒng) 而且網(wǎng)絡(luò)普遍都一樣的所以想請教一下 各位高機器人的我應(yīng)該從何學(xué)起 我們就算是一個隊伍吧一共8
2016-01-19 13:44:49
機器人廠家 智能搬運機器人 倉庫搬運機器人 自動搬運機械手 自動化搬運設(shè)備 智能物流搬運裝置 自動搬運系統(tǒng) 工業(yè)搬運機器人全自動搬運機械手 自動化吸盤機械手 流水線搬運機器人 多關(guān)節(jié)搬運機器人 自動化搬運生產(chǎn)線 搬運機器人`
2018-08-14 09:37:05
人的工作量,而且機器人跟人工相比,可以實現(xiàn)24小時不間斷工作。所以,再牛的自動化車間都少不了搬運機器人。本文出自力泰科技轉(zhuǎn)載請注明出處關(guān)鍵詞:搬運機器人廠家 智能搬運機器人 倉庫搬運機器人 自動搬運機械手
2018-08-20 11:21:01
博創(chuàng)科技剛剛推出了最新的UP-InnoSTAR™創(chuàng)意之星™機器人套件產(chǎn)品,以替換上一代“創(chuàng)意之星”產(chǎn)品。該套件是一套用于開展機器人創(chuàng)新實驗的模塊化機器人套件
2011-03-05 10:54:52
機器人是先進的機電一體化數(shù)字化裝備,集機械、電子、控制、計算機、傳感器、人工智能等多學(xué)科高新技術(shù)于一體,技術(shù)附加值很高。對提高產(chǎn)品的質(zhì)量與產(chǎn)量、保障人身安全,改善勞動環(huán)境,減輕勞動強度,提高勞動生產(chǎn)率
2015-09-02 14:03:18
復(fù)雜的工作。名稱也從另一方面說明了其能模塊化的完成指定工作,同時說明了單軸機器人已經(jīng)發(fā)展的很成熟。二、多軸機器人常指的是四軸或六軸機器人,通過底座固定在一定的空間內(nèi)可以自由的活動并根據(jù)設(shè)定程序完成抓取
2017-11-23 10:17:45
機器人也是現(xiàn)在比較熱門的,尤其是仿生機器人的推出,更是震驚了世界,我也想親手做一個,但是太復(fù)雜了只能想想。既然做機器人不現(xiàn)實,那就做個機械手臂吧,畢竟做機器人也是從做機械手臂開始的。所以就準(zhǔn)備用
2018-09-25 16:43:30
縮小,本文闡述了一種通用性好、通信性能較強、采用成熟技術(shù)、運行穩(wěn)定安全的模塊化通信系統(tǒng), 適合大多數(shù)機器人應(yīng)用 , 無論主控制器簡單還是復(fù)雜 , 有無操作系統(tǒng)或使用任意一種操作系統(tǒng) , 只需要使用通用
2018-02-22 10:05:22
的、多用途的操作機。其工作的行為方式主要是通過完成沿著X、Y、Z軸上的線性運動。多軸機器人又稱單軸機械手,工業(yè)機械臂,電缸等,是以XYZ直角坐標(biāo)系統(tǒng)為基本數(shù)學(xué)模型,以伺服電機、步進電機為驅(qū)動的單軸機械臂為
2020-07-29 06:57:04
、沖床/沖壓上下料機械手、沖床/沖壓上下料機器人、數(shù)控車床上下料機械手、數(shù)控車床上下料機器人。工業(yè)機器人組成詳解圖如下工業(yè)機器人用的什么系統(tǒng)好學(xué)嗎各品牌機器人都有自己的專用控制系統(tǒng),一般都是基于高級語言,加上運動控制語言,比較好學(xué)。像杭州端德教育開設(shè)的就有工業(yè)機器人方向的專業(yè)`
2016-03-06 12:56:19
應(yīng)用對象相結(jié)合后的系統(tǒng),其是硬件和軟件緊密捆綁在一起的系統(tǒng)。將嵌入式系統(tǒng)應(yīng)用于滅火機器人的設(shè)計中,對機器人的性能智能化、網(wǎng)絡(luò)化、小型化都有了明顯提高。比賽用滅火機器人需要機器人有智能較高的自動控制
2019-07-31 06:23:18
最近構(gòu)思想做一個簡單的機器人,這個機器人安裝有攝像頭、機械手且通過無線控制行走和動作,采用nrf24l01+無線模塊來實現(xiàn)通訊,人可以遠程結(jié)合攝像頭來操作機器人。現(xiàn)在我想把這個發(fā)射端遙控裝置建立一個
2014-10-25 13:31:35
今天,機器人正被應(yīng)用于那些先前不曾使用機器人的生產(chǎn)領(lǐng)域。針對不同的情況,必須始終分別考慮各個安全方面并針對每種應(yīng)用實施合適的安全解決方案。安全的傳感器技術(shù)舉足輕重:為了滿足所有安全相關(guān)的應(yīng)用,需要采用滿足傳感器需要的模塊化方法。
2020-05-07 08:16:08
安川機器人碼垛實例,兩抓機械手,一放一抓,八個碼垛框并排放。
2018-11-27 23:30:24
隨著科技的進步,機器人技術(shù)正在向智能機器和智能系統(tǒng)的方向發(fā)展,其發(fā)展趨勢主要為結(jié)構(gòu)的模塊化和可重構(gòu)化;控制技術(shù)的開放化、可配置化;伺服驅(qū)動技術(shù)的數(shù)字化和分散化;多傳感器融合技術(shù)的實用化。機器人的內(nèi)涵
2019-08-20 07:21:01
ZNT-MK01工業(yè)機器人模塊化教學(xué)工作站是什么?ZNT-MK01工業(yè)機器人模塊化教學(xué)工作站有哪些技術(shù)性能?
2021-09-28 07:35:14
整合,結(jié)構(gòu)模塊化,便于組合,實現(xiàn)對高速傳輸線上的不同物料進行快速的檢測、組裝。為了方便實訓(xùn)教學(xué),系統(tǒng)進行了專門的設(shè)計,可以完成各類機器人單項訓(xùn)練和綜合性項目訓(xùn)練,可完成各類機器人單項訓(xùn)練和綜合性項目訓(xùn)練
2021-07-01 11:48:31
ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺一、概述1、ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺以工業(yè)機器人與機器視覺為核心,將機械、氣動、運動控制、變頻調(diào)速、PLC控制技術(shù)有機地進行整合,結(jié)構(gòu)模塊化
2021-07-01 06:38:35
)機器人的系統(tǒng)結(jié)構(gòu)一臺通用的工業(yè)機器人,按其功能劃分,一般由3個相互關(guān)連的部分組成:機械手總成、控制器、示教系統(tǒng),如圖所示。機械手總成是機器人的執(zhí)行機構(gòu),它由驅(qū)動器、傳動機構(gòu)、機器人臂、關(guān)節(jié)、末端操作器
2017-12-15 10:25:19
模塊化的控制系統(tǒng)體系結(jié)構(gòu):采用分布式CPU計算機結(jié)構(gòu),分為機器人控制器(RC),運動控制器(MC),光電隔離I/O控制板、傳感器處理板和編程示教盒等。機器人控制器(RC)和編程示教盒通過串口/CAN總線
2018-11-23 10:40:38
可以在礦山、深海等惡劣環(huán)境代替自然人進行工作,還可以進入人們的日常生活提供服務(wù),甚至成為人們的朋友。 在工業(yè)機器人領(lǐng)域,機器人的定義已悄悄地發(fā)生了變化,不再局限于固定式的雙自由度機械手或三自由度機械手
2015-02-03 10:51:09
、模塊化綜臺平臺各個功能模塊的認識與實訓(xùn),可以讓學(xué)生了解機器人末端央具的機械組成、電氣控制回路、氣動控制回路、視覺
2021-07-01 12:05:38
教育機器人搬運碼垛套件采用Openduino龍人寶貝機械手完成不同色塊的搬運碼垛任務(wù)。Openduino龍人寶貝機械人手由兩輪差動移動平臺和四自由度機械手的組成,能夠方便地外擴各種傳感器,完成各種搬運碼垛作業(yè)任務(wù)。機器人采用框架結(jié)構(gòu),拆裝方便。
2016-03-29 10:22:15
`小型搬運碼垛機器人是專門為實現(xiàn)小型柱狀物料搬運及碼垛的移動機械手,能夠完成中國教育機器人。大賽的搬運碼垛競賽任務(wù)。機器人的移動由兩輪伺服電機驅(qū)動,萬向輪協(xié)助轉(zhuǎn)向,并用多個循線傳感器輔助完成復(fù)雜路線
2016-04-01 14:18:48
機械手依靠X軸(前后),Y軸(左右),Z軸(上下),T軸(翻轉(zhuǎn)),R軸(旋轉(zhuǎn))等完成各種復(fù)雜的動作。 1.操作界面數(shù)控機床機器人具備人性化的人機操作界面,且與數(shù)控車床主機有同步功能。數(shù)控機床機械手
2018-11-16 11:42:25
的發(fā)展必須要去改變的,我們要做的就是不斷的改進,讓它更能適應(yīng)工廠的實際需求,不然沖壓機械手也會很快被淘汰的。本文出自力泰科技轉(zhuǎn)載請注明出處關(guān)鍵詞:沖壓機器人 智能沖壓機器人 自動化沖壓機械手 沖壓機械手
2018-08-16 10:01:16
山東康道資訊:桁架機器人操作注意守則!好的桁架機器人守則能讓性能不斷提高(高速度、高精度、高可靠性、便于操作和維修),機械手控制器系統(tǒng)也跟著向基于PC機的開放型控制器方向發(fā)展,便于標(biāo)準(zhǔn)化、網(wǎng)絡(luò)化
2018-09-27 15:54:21
機器人移動以搜索目標(biāo),搜索到目標(biāo)后通過車載機械手完成救援任務(wù)。該機器人既可應(yīng)用到危險區(qū)域的搜救行動,也可用做家庭服務(wù)機器人,還可以直接參加中國教育機器人大賽的滅火救援比賽。重要技術(shù)點: 機器人遠程遙控、機械手遙操作、Wi-Fi圖像實時顯示、Zigbee通信
2016-03-25 14:34:01
` 點膠機器人是從人工到自動化的一個重大轉(zhuǎn)變。它包含了機械、電氣、PLC程序的編寫等。很好地詮釋了機電一體化技術(shù)的非凡應(yīng)用。是機電一體化朝著智能化、模塊化、綠色化的最佳體現(xiàn)。 要想了解點膠機器人
2015-02-06 10:37:30
的6軸關(guān)節(jié)式操作機,它由驅(qū)動器、傳動機構(gòu)、機械手臂、關(guān)節(jié)以及內(nèi)部傳感器等組成。2、機器人控制柜:它是機器人系統(tǒng)的神經(jīng)中樞,包括計算機硬件、軟件和一些專用電路,負責(zé)處理機器人工作過程中的全部信息和控制其
2020-11-16 16:18:45
的碼放物,如覆膜包裝盒,聽裝啤酒箱,塑料箱,紙箱等。本文出自力泰科技轉(zhuǎn)載請注明出處關(guān)鍵詞:碼垛機器人 自動碼垛生產(chǎn)線 自動碼垛機械手 自動碼垛設(shè)備 自動碼垛系統(tǒng) 自動化機械手 工業(yè)碼垛機器人 真空吸取式機械手``
2018-08-15 09:55:44
知名產(chǎn)品,目前在自主研發(fā)、規(guī)模化量產(chǎn)、市場占有率及客戶滿意度等方面均居于國內(nèi)*地位,特別是自動上下料機器人、自動上下料機器人、桁架式機械手、沖床機械手、五金沖壓機械手等機械結(jié)構(gòu)的設(shè)計與仿真,動作控制
2018-09-29 12:00:27
修改了一下,使之兼容arduino。但必須說明一下:對于arduino愛好者來說,圖形化并沒有實際意義,這個軟件是面向中小學(xué)生的,搞機器人教育的兄弟才會理解這個。自己開發(fā)的圖形化機器人編程軟件,特點
2016-07-02 20:15:27
本文針對地面移動機器人,在CAN總線的基礎(chǔ)上,設(shè)計了一種模塊化的控制器結(jié)構(gòu)。這種設(shè)計具有可靠性強、擴展性好等特點。實際應(yīng)用證明了該設(shè)計的可行性。關(guān)鍵詞:模塊化;
2009-05-25 11:22:11 30
30 模塊化可重構(gòu)機器人由若干個相同的機器人模塊組合裝配而成,能夠重構(gòu)成不同的幾何形態(tài)和結(jié)構(gòu),從而適應(yīng)不同的作業(yè)任務(wù)要求。本論文主要對樹狀拓撲結(jié)構(gòu)的模塊化機器人的重
2009-05-25 14:41:3828 本文以基于optotrak 的PowerCube 機器人閉環(huán)系統(tǒng)為研究對象,對PowerCube 模塊化機器人進行了運動學(xué)的分析,并利用optotrak 反饋的目標(biāo)位置信息完成了機器人抓取物體的任務(wù)。隨著
2009-08-15 11:10:447 提出了一種基于六維力/力矩傳感器的模塊化機器人慣性參數(shù)辨識的方法。首先,通過Newton-Euler 方程建立模塊化機器人的動力學(xué)方程,然后利用基座力旋量平衡原理建立辨識模型
2009-11-26 13:30:158 RJS-II系列關(guān)節(jié)模組是泰科智能推出的一款基于模塊化理念設(shè)計、輕巧、高精度的協(xié)作機器人關(guān)節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性價比更高,為您解決機器人在更多復(fù)雜環(huán)境中的適應(yīng)性和穩(wěn)定性
2023-04-17 15:02:00
深圳泰科智能TB6-R5協(xié)作機器人是一款靈活的輕型工業(yè)協(xié)作機器人,具有精巧的機械結(jié)構(gòu)設(shè)計。這款協(xié)作機器人有效負載為5KG,自重僅為23KG,重復(fù)定位精度可達±0.05mm,適應(yīng)多樣性、柔性生產(chǎn)
2023-04-17 15:15:06
深圳泰科智能TB6-R5協(xié)作機器人是一款靈活的輕型工業(yè)協(xié)作機器人,具有精巧的機械結(jié)構(gòu)設(shè)計。這款協(xié)作機器人有效負載為5KG,自重僅為23KG,重復(fù)定位精度可達±0.05mm,適應(yīng)多樣性、柔性生產(chǎn)
2023-04-17 15:57:13
深圳泰科智能TB6-R5協(xié)作機器人是一款靈活的輕型工業(yè)協(xié)作機器人,具有精巧的機械結(jié)構(gòu)設(shè)計。這款協(xié)作機器人有效負載為5KG,自重僅為23KG,重復(fù)定位精度可達±0.05mm,適應(yīng)多樣性、柔性生產(chǎn)
2023-04-17 16:12:03
RJU系列關(guān)節(jié)模組——面向商業(yè)、生活服務(wù)類應(yīng)用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機器人關(guān)節(jié),而是一款能夠給機器人更多設(shè)計空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶
2023-04-17 16:25:29
深圳泰科智能TB6-R10協(xié)作機器人是一款功能更強的工業(yè)級協(xié)作機器人,能夠勝任10KG的有效負載的自動化任務(wù),工作半徑可達1333mm,適用于大范圍、大負載的作業(yè)任務(wù),可應(yīng)用于工廠自動化、汽車、3C、醫(yī)療、電力、科研、教育等多個行業(yè)、多場景的自動化需求。
2023-04-17 16:36:37
RJU系列關(guān)節(jié)模組——面向商業(yè)、生活服務(wù)類應(yīng)用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機器人關(guān)節(jié),而是一款能夠給機器人更多設(shè)計空間,和應(yīng)用領(lǐng)域的關(guān)節(jié),客戶
2023-04-17 17:40:55
TB6-R5協(xié)作機器人是一款靈活的輕型工業(yè)協(xié)作機器人,具有精巧的機械結(jié)構(gòu)設(shè)計。這款協(xié)作機器人有效負載為5KG,自重僅為23KG,重復(fù)定位精度可達±0.05mm,適應(yīng)多樣性、柔性生產(chǎn)應(yīng)用需求。模塊化
2023-04-19 09:16:32
TB6-R15協(xié)作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準(zhǔn)度領(lǐng)域的自動化作業(yè)任務(wù)。這款協(xié)作機器人功能強大、高自重負載比、高可靠性、模塊化關(guān)節(jié)設(shè)計,易于末端擴展外部設(shè)備,可以實現(xiàn)快速安裝部署。
2023-04-19 09:27:59
機器人功能強大、高自重負載比、高可靠性、模塊化關(guān)節(jié)設(shè)計,易于末端擴展外部設(shè)備,可以實現(xiàn)快速安裝部署。
2023-04-19 11:29:30
機器人功能強大、高自重負載比、高可靠性、模塊化關(guān)節(jié)設(shè)計,易于末端擴展外部設(shè)備,可以實現(xiàn)快速安裝部署。
2023-04-19 11:39:15
機器人功能強大、高自重負載比、高可靠性、模塊化關(guān)節(jié)設(shè)計,易于末端擴展外部設(shè)備,可以實現(xiàn)快速安裝部署。
2023-04-19 11:43:30
泰科關(guān)節(jié)機器人具備哪些優(yōu)勢? 一、編程簡單可以讓無編程經(jīng)驗的操作人員能快速設(shè)置和操作我們的直觀、3D 可視化協(xié)作式機器人。只需將機器人手臂移動至需要的位置,或觸摸方便易用的觸屏
2023-04-19 15:13:28
提出了一種基于六維力/力矩傳感器的模塊化機器人慣性參數(shù)辨識的方法。首先,通過Newton-Euler 方程建立模塊化機器人的動力學(xué)方程,然后利用基座力旋量平衡原理建立辨識模型
2010-01-15 11:11:0630 產(chǎn)品簡介經(jīng)世智能實驗室物料轉(zhuǎn)運復(fù)合機器人,復(fù)合機器人在智慧實驗室行業(yè)主要應(yīng)用于實驗樣本自動化轉(zhuǎn)運、高通量實驗流程銜接、危險物料與廢棄物處理等環(huán)節(jié),通過“AGV移動底盤+協(xié)作機械臂+視覺系統(tǒng)”一體化
2025-08-13 10:06:22
ABB機械手,機器人指令精選版,ABB 工業(yè)機器人實操與應(yīng)用技巧
2016-01-19 14:56:310 機器人機械手畢業(yè)設(shè)計論文模板機器人機械手畢業(yè)設(shè)計論文模板
2016-03-07 11:55:1132 藍牙技術(shù)的機器人模塊化無線通信
2017-09-01 11:04:256 針對傳統(tǒng)養(yǎng)老機器人功能單一、擴展性差等問題,研究了一種基于模塊化設(shè)計方案的養(yǎng)老機器人。該方案以STM32單片機為控制核心,通過超聲波傳感器、高清攝像頭、溫濕度傳感器、電壓檢測元件等傳感器采集機器人
2018-02-23 10:10:044 電轉(zhuǎn)(DENSO)工業(yè)機器人VMG系列機械手概述
2018-02-28 16:31:3228 目前國內(nèi)經(jīng)濟不容樂觀,絲毫沒有好轉(zhuǎn)的跡象,很多企業(yè)開始從生產(chǎn)工藝上著手大幅降低了運營成本,步科現(xiàn)在實現(xiàn)了機器人底盤的模塊化運作,大大降低生產(chǎn)成本,對機器人企業(yè)而言,實現(xiàn)低成本運營也是必然的趨勢。
2018-07-20 08:56:445588 噴涂機械手說明:噴涂機械手每個人的叫法不同、有人叫噴涂機械手、噴油機械手、噴漆機械臂、往復(fù)機也有人認為式機械手、機械手和機器人也有區(qū)別、分為幾軸機械手 通機械手4/5/6軸機械手使用的最多 如果
2018-11-29 09:04:161756 山東康道智能資訊:桁架機器人機械手之手臂解說,桁架機器人的手臂是機加工自動化生產(chǎn)線的重要組成部分,很多時候,定制的是桁架機器人的手臂部分,因為手臂是用來執(zhí)行人工操作的部分。 一、桁架機器人機械手之手
2018-12-20 16:11:081018 本文檔的主要內(nèi)容詳細介紹的是臺達工業(yè)機器人四軸機械手DRS系列電控手冊主要內(nèi)容包括了:1 產(chǎn)品說明 ,2 安裝,3 配線及接頭說明,4 電池更換,5 硬體元件,6 異警排除說明
2019-01-09 08:00:0017 節(jié)機器人、2、3、4、5、6軸機械手、上下料機械手、自動化機械手、沖壓沖床機械手等自動化設(shè)備桁架機器人是由具有多年自動化應(yīng)用經(jīng)驗的山東康道智能針對數(shù)控機床自動上下料的需求而開發(fā)的自動化設(shè)備。目前機械手系列
2019-01-16 16:51:591621 山東康道智能資訊:桁架機器人機械手價格是多少?購買桁架機器人機械手除了對性能質(zhì)量在乎,對桁架機器人價格也是極為在乎的。一、桁架機器人機械手價格是多少?桁架機器人機械手價格是多少?你會發(fā)現(xiàn)每個桁架
2019-01-25 14:48:492773 烏爾姆應(yīng)用科技大學(xué)服務(wù)機器人研究中心正在開發(fā)一種模塊化軟件框架以便簡化機器人編程。此框架旨在提供通用軟件組件,例如,根據(jù)需要替換不同制造商的機械夾持臂,從而通過即插即用方式實現(xiàn)新機器人解決方案。烏爾姆大學(xué)的團隊依靠康佳特(congatec)具有高擴展性和標(biāo)準(zhǔn)化的嵌入式計算硬件來滿足需求。
2019-06-15 09:06:244457 自動糾偏、輕拿輕放、震動小且穩(wěn)定……近日,由新松機器人自動化股份有限公司研制生產(chǎn)的柔性O(shè)LED機器人——SCARA機械手投入使用,這是國產(chǎn)機器人首次進入高端柔性屏幕生產(chǎn)線。
2019-12-18 09:55:151877 作者是賓夕法尼亞大學(xué)GRASP實驗室在讀博士生劉超,主要從事模塊化機器人的研究,包括硬件設(shè)計、控制及運動規(guī)劃算法、決策等,在各大機器人會議和期刊發(fā)表論文多篇,包括ICRA,IROS,RSS以及
2020-10-15 11:33:293197 實現(xiàn)機床裝卸自動化的方法有兩種:桁架機械手和關(guān)節(jié)機器人。在過去,我們看到了更多的桁架機械手。有人說,自動裝卸的難點在于工作站的布局,即生產(chǎn)線的規(guī)劃。許多公司要求緊湊型生產(chǎn),最常見的是U型和圓盤型
2020-12-27 10:14:553821 當(dāng)前機器人教學(xué)產(chǎn)業(yè)方興未艾,如何提高學(xué)生的學(xué)習(xí)效率?最佳的方式是打通從原理教學(xué)到驗證實踐的快速開發(fā)路徑,融合機器人軟件設(shè)計、硬件設(shè)計、算法設(shè)計、應(yīng)用開發(fā)等多個環(huán)節(jié),實現(xiàn)一體化開發(fā)。多功能模塊化機器人
2022-05-06 12:16:223503 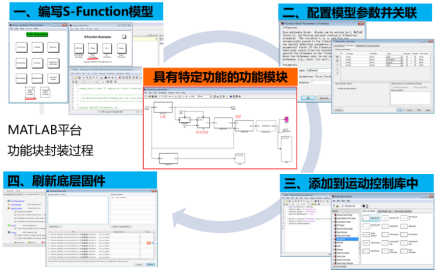
多功能模塊化機器人科教平臺基于中科院沈陽自動化研究所自主研發(fā)的開放式機器人控制系統(tǒng),通過MATLAB自動代碼生成方式實現(xiàn)一體化關(guān)節(jié)、機器人運動控制、機器人力位混合控制、機器人視覺集成、機器人人工智能等多層次實驗環(huán)境,打通了機器人算法仿真到真機部署的全流程。
2022-05-10 17:43:330 碼垛機器人維修及保養(yǎng),碼垛機器人維護,焊接機器人維修,搬運機器人維修,進口國產(chǎn)碼垛機械手的維修,如不能自行維修解決的,一定找專業(yè)的機器人維修公司,可以咨詢:帕斯科(山東)機器人科技有限公司。工業(yè)機器人的維修服務(wù)熱線:15662018863
2022-11-09 09:54:27942 
機器人視覺抓取的目的是使用一個機械手模型(包括二指或多指夾爪,吸盤等),以RGB或RGBD相機采集的場景圖像為輸入計算出一個最優(yōu)的抓取位姿,使機械手在該位姿下可以穩(wěn)定地抓取模型已知或未知的物體。
2023-03-30 10:19:291102 的首選方案。本文將圍繞MT6701磁編碼器芯片在機器人關(guān)節(jié)中的集成應(yīng)用,探討模塊化設(shè)計方法與驅(qū)動優(yōu)化策略,為高性能機器人關(guān)節(jié)開發(fā)提供技術(shù)參考。
2025-08-20 17:26:311008 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論