") 模塊化機器人SMORES-EP的并行自組裝,實現(xiàn)了最短的模塊運行距離
模塊化機器人SMORES-EP的并行自組裝,實現(xiàn)了最短的模塊運行距離

作者是賓夕法尼亞大學(xué)GRASP實驗室在讀博士生—劉超,主要從事模塊化機器人的研究,包括硬件設(shè)計、控制及運動規(guī)劃算法、決策等,在各大機器人會議和期刊發(fā)表論文多篇,包括ICRA,IROS,RSS以及RA-L,并獲得IROS最佳搜索救援機器人論文提名。
本文將分享他在ICRA 2020上的最新工作:模塊化機器人SMORES-EP的并行自組裝方法。該方法實現(xiàn)了最短的模塊運行距離并通過實驗驗證了方法和對接控制的可靠性。
一、引言
自重構(gòu)模塊化機器人由一種或幾種形態(tài)的模塊構(gòu)成,模塊之間可以通過相同的連接方式組合成不同的形態(tài),并且可以通過連接裝置傳遞力、力矩以及交換信息。這種機器人可以像傳統(tǒng)的機器人一樣通過改變關(guān)節(jié)變量來調(diào)整姿態(tài),做出不同的行為,例如抓取、操縱和移動,同時還可以對自己的形態(tài)做出很大程度上的改變,即通過改變模塊之間的連接方式實現(xiàn)了關(guān)節(jié)拓?fù)浣Y(jié)構(gòu)的改變,從而更好地適應(yīng)不同的環(huán)境、行動或任務(wù)。自重構(gòu)模塊化機器人一般分為三種類型:chain-type, lattice-type和mobile-type [1]。SMORES-EP(圖1)是一種混合類型機器人,可以實現(xiàn)上述三種類型的模塊化機器人的所有運動形式。
圖 1:一個SMORES-EP有四個自由度和四個連接器,兩個模塊之間一共有17種不同的連接方式。
每個SMORES-EP模塊有四個EP-Face連接器[2] 和四個自由度,獨特的運動學(xué)結(jié)構(gòu)使得任意兩個模塊之間存在著17種連接方式,因此SMORES-EP模塊可以組成種類繁多的不同形態(tài)來適應(yīng)不同的環(huán)境和任務(wù)。比如在圖2a中,7個SMORES-EP模塊組成了一個可以快速移動的小車的形態(tài),從而能夠快速地在地面上移動完成探索、運輸?shù)热蝿?wù),但是當(dāng)遇到崎嶇不平的洼地時,這種小車形態(tài)并不利于運動,因此這些模塊可以變形成蛇的形態(tài)(圖2b),從而可以通過這類地形[3]。
圖 2:(a)7個SMORES-EP模塊可以形成一個可以快速移動的小車, 從而能夠快速移動;(b)同時可以變形成一條蛇來通過崎嶇的地形。
每個SMORES-EP模塊的左輪和右輪兩個自由度賦予了其在地面上以差分驅(qū)動小車的形式自由運動的能力,這個特性使得每個模塊可以獨立于其他模塊單獨運動。配合SMORES-EP的自重構(gòu)能力,多個模塊可以表現(xiàn)出一定的群體行為。類似于自然界中生物的群體智慧行為,比如一只小螞蟻的行為能力極其有限,但是一群螞蟻卻能夠表現(xiàn)出驚人的、極大超出每個個體能力極限的行為。
一個SMORES-EP模塊雖然有4個自由度,但是運動能力有限,能適應(yīng)的環(huán)境和任務(wù)場景也因此收到了很大限制,例如一個模塊是無法通過一道較寬的溝壑的,但是三個模塊可以組成一個蛇形從而通過這道溝壑。多個分散的模塊協(xié)同工作、自主拼裝成一個復(fù)雜形態(tài)的能力可以極大地增強這類模塊化機器人的適應(yīng)能力,使其完成任一單獨的模塊均無法完成的任務(wù),這個運動規(guī)劃過程稱之為self-assembly planning。
二、模塊化機器人并行自組裝
1、機器人形態(tài)模型
一個模塊化機器人形態(tài)(拓?fù)浣Y(jié)構(gòu))可以用一個無向圖G =(V,E)來表示,其中V是G的頂點的集合,代表著所有的模塊,E是G的所有邊的集合,每條邊包含著表示模塊間的連接方式的必要信息,這些信息取決于模塊化機器人的設(shè)計[4]。任意兩個頂點間存在唯一一條路徑的無向圖是樹,一個樹G=(V,E)可以相對于某個頂點轉(zhuǎn)換成有根樹,我們選取圖的中心[5]為根節(jié)點模塊。我們在[4]中提出了一個線性時間復(fù)雜度的算法來找到一個樹狀拓?fù)浣Y(jié)構(gòu)的模塊化機器人的中心。例如,圖3a是一個由三個 SMORES-EP組成的簡單形態(tài),對應(yīng)的圖G=(V,E)表示在圖3b 中,其中根模塊是2號模塊。
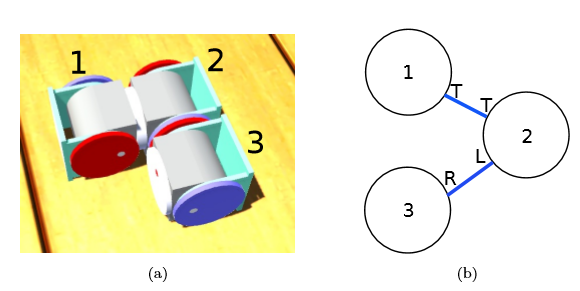
圖 3:(a)三個SMORES-EP組成的一個形態(tài)和(b)對應(yīng)的圖G=(V,E)。
2、并行自組裝
我們這里提出一種可以并行的自組裝方法。已知的條件是每個模塊當(dāng)前的位置(圖4a)以及期望的最終形態(tài)(圖4b)。首先要解決的是最優(yōu)地找到每個模塊對應(yīng)到最終形態(tài)中的角色。所有SMORES-EP模塊都是一模一樣的,因此并沒有固定的角色分配方案,但是好的分配方案可以使組裝的過程更快、更容易。我們這里期望所有模塊需要運行的距離能夠最短。為了達(dá)到這個目的,首先將目標(biāo)形態(tài)展開到地面上、計算根模塊,基于根模塊,可以快速計算出其余每個模塊的2D位姿。基于現(xiàn)實中每個模塊當(dāng)前的位置,我們可以通過解決一個任務(wù)分配(task assignment)的問題來找到最優(yōu)的分配方案。
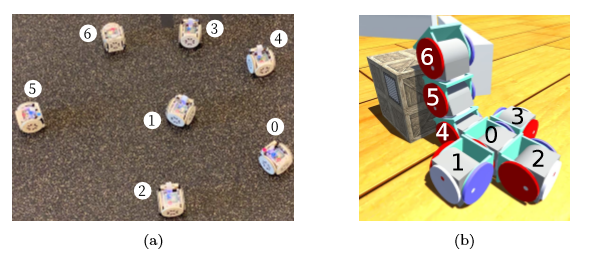
圖 4:(a)七個模塊的初始狀態(tài);(b)期望變成的形態(tài)。
當(dāng)每個模塊都被最優(yōu)地分配了相應(yīng)的角色之后,自組裝便可以開始。從根模塊開始,處于同一深度的模塊可以同時開始組裝的過程,直到所有處于葉子節(jié)點的模塊完成最終的組裝動作。一個組裝動作可以簡單表示成一個元祖(mi, ci,mj,cj),代表著將模塊mi的連接器ci與模塊mj的連接器cj相連接。對于模塊化機器人,這個對接的過程往往費時費力,因此我們提出一種可靠的方法來保證對接的成功。就像把大象放進冰箱一樣,我們把對接的過程分成三步:第一步是導(dǎo)航,即控制SMORES-EP 模塊快速穩(wěn)定地到達(dá)一個接近目的地的地方(圖5a),在這個過程中需要對多個模塊進行路徑規(guī)劃; 第二步是調(diào)整姿態(tài)準(zhǔn)備對接(圖5b); 第三步是靠近對應(yīng)模塊完成對接(圖5c)。詳細(xì)的控制器設(shè)計及其表現(xiàn)可以查看我們的論文。
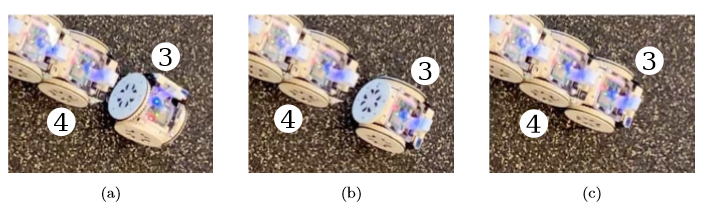
圖 5:執(zhí)行組裝動作(3,T,4,B)。(a)控制 3 號模塊導(dǎo)航至一個接近目標(biāo)的 位置,(b)調(diào)整姿態(tài)準(zhǔn)備對接,(c)靠近 4 號模塊完成對接。
三、 實驗及結(jié)論
在論文和視頻中我們演示了三個實驗:
1. 7個分散的模塊自組裝成一個帶有機械臂的小車從而可以接觸高臺(圖4b);
2. 9個分散的模塊自組裝成一個可以任意方向移動的小車(圖6a);
3. 7個分散的模塊自組裝成一個差分驅(qū)動四輪車從而可以推動重物(圖6b);
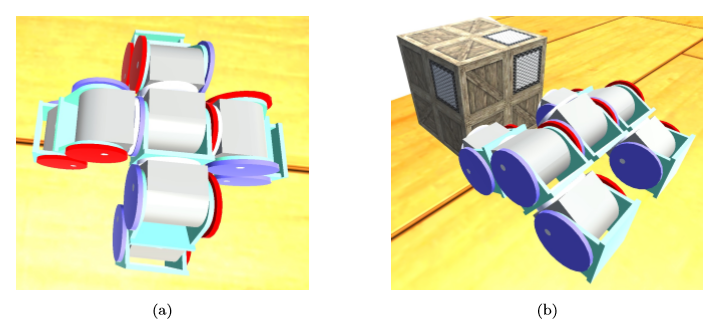
圖 6:(a)9 個分散的模塊自組裝成一個可以任意方向移動的小車;(b)7 個分散的模塊自組裝成一個差分驅(qū)動四輪車從而可以推動重物。
在這三個實驗中我們展示了并行自組裝的全過程,驗證了我們的方法和對接控制的可靠性。在第三個實驗中,特殊的地方是需要helping module的幫助來完成一些組裝的動作。單個模塊依賴左右輪進行運動,因此在對接的時候無法直接控制這兩個連接器的角度,需要一個helping module輔助抬起模塊以完成連接器角度的調(diào)整。關(guān)于這個工作更多的內(nèi)容可以在ModLab網(wǎng)站的post查看,也可以在SMORES-EP項目主頁上查看更多關(guān)于SMORES-EP的研究工作。
參考文獻(xiàn)
[1] M. Yim, W. Shen, B. Salemi, D. Rus, M. Moll, H. Lipson, E. Klavins, and G.S.Chirikjian,“Modular self-reconfigurable robot systems[grand challenges of robotics],” IEEE Robotics Automation Magazine, vol. 14, no. 1, pp. 43–52, 2007.
[2] T. Tosun, J. Davey, C. Liu, and M. Yim, “Design and characterization of the ep-face connector,” in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, pp. 45–51.
[3] C. Liu, M. Whitzer, and M. Yim, “A distributed reconfiguration planning algorithm for modular robots,” IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 4231–4238, 2019.
[4] C. Liu and M. Yim, “Configuration recognition with distributed information for modular robots,” in IFRR International Symposium on Robotics Research, Puerto Varas, Chile, 2017.
[5] G.L.McColm,“On the structure of random unlabelled acyclic graphs,” Discrete Math., vol. 277, no. 1, pp. 147–170, 2004.
責(zé)任編輯:xj
-
機器人
+關(guān)注
關(guān)注
213文章
31092瀏覽量
222346 -
模塊化機器人
+關(guān)注
關(guān)注
0文章
5瀏覽量
6567
發(fā)布評論請先 登錄
小型自重構(gòu)機器人能不能幫忙做一個?
再談低溫?zé)Y(jié)銀的應(yīng)用:從春晚四家機器人出鏡的幕后推手說起
研華模塊化電腦SOM-7583:通過模塊化架構(gòu)應(yīng)對人形機器人應(yīng)用挑戰(zhàn)

模塊化高精度銣原子鐘存在的意義
鼎陽科技推PXIe模塊化示波器、PXIe模塊化矢量網(wǎng)絡(luò)分析儀產(chǎn)品組合,構(gòu)建新一代模塊化、軟件定義的測試平臺

電子谷機器人線束|人形機器人“神經(jīng)脈絡(luò)”,穩(wěn)定護航產(chǎn)業(yè)化

CW32L012小型機器人控制評估板活動 四足機器人+智能小車 開箱評測
高精度機器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運動控制方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
NVIDIA Isaac Lab推動機器人技術(shù)突破
移動機器人技術(shù)的發(fā)展歷程
集成MT6701磁編芯片的機器人關(guān)節(jié)模塊化設(shè)計與驅(qū)動優(yōu)化

工業(yè)機器人的特點
詳細(xì)介紹機場智能指路機器人的工作原理
MCU-40型自動測量是如何實現(xiàn)分布式模塊化?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論