運動神經中樞系統,通過穿戴傳感器設備,操控機械臂靈巧手和小朋友握手,控制機器人拿放試管等動作,機器人的動作與人幾乎同步。 ? 工作人員介紹,公司主攻人形機器人運動神經中樞系統,通過控制機器人小腦實現高精度、低延遲的動作。目
2025-05-19 05:50:00 6461
6461 速率低、功耗大的短板日趨明顯,這時就需要新的升級版的總線協議來接棒。 I3C,全稱Improved Inter Integrated Circuit,作為I2C的升級版接過了這個I2C手中的接力棒。I3C整合并統一了I2C和SPI的關鍵屬性,同時通過全面、可擴展的接口和體系結構改進每種方法的功能
2022-12-07 07:25:0213439 人形機器人全身裝備6個RGB攝像頭,分別位于頭部、胸前和后背,通過其 AI 驅動的視覺系統感知和理解物理世界。 靈巧手方面,F
2024-08-11 01:05:005006 
)細節時也特別談到了靈巧手。他表示,下一代Optimus的手部將有22個自由度,前一代版本擁有11個自由度,“它看起來非常像人類的手,可以彈鋼琴,甚至可以彈吉他。” ? 從10+自由度到20+自由度,是機器人靈巧手下一步升級的主流趨勢,可以讓機械臂
2024-10-30 01:09:004349 另一方面,除了活動能力之外,人形機器人真正能夠完成通用任務的關鍵,是擁有一雙靈活的手,靈巧手目前也是各大機器人廠商攻關的方向。最近在2025ITES深圳工業展上,有多家廠商展出了最新的機器人靈巧手產品。 ? 雷賽智能DH116 ? 雷賽智
2025-03-28 00:07:003823 
。除了天工機器人之外,宇樹人形機器人/機器狗、夏瀾S01機器人,以及多家廠商的靈巧手等悉數展示。 ? 天工機器人 ? 筆者看到,天工機器人走路時受到現場觀眾追捧,人氣非常高。 ? ? “天工行者”機器人由北京人形機器人創新中心聯合優必選科技
2025-04-27 07:59:003511 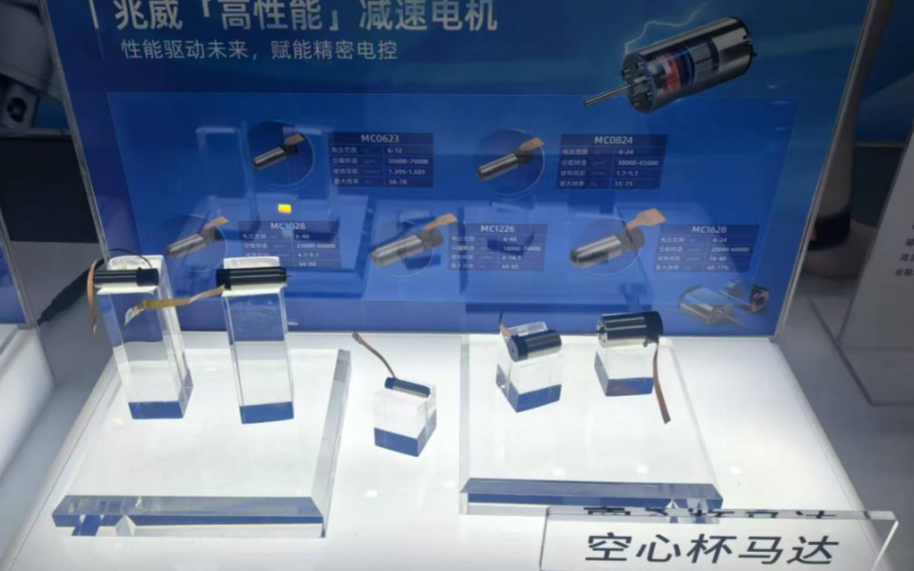
功率密度、高傳動效率、高響應速度和高精度控制等優點,天然適用于人形機器人的關節驅動。其無鐵芯設計消除了磁滯和渦流損耗,提高了能量轉換效率,降低了發熱和噪音。 ? 空心杯電機在人形機器人中主要應用于靈巧手關節,并逐步
2025-04-29 00:58:003941 電子發燒友網報道(文 / 吳子鵬)日前,華西證券研報指出,靈巧手是人形機器人落地的關鍵所在,但其后續的更新迭代仍面臨較高技術難度。具備靈巧手本體設計與生產能力的廠商,有望在產業鏈中占據較大
2025-05-30 00:08:007281 MR73A輪式人形和MR738升級人形機器人 來自新松官微 工業機器人市場規模持續增長,未來發展面對三大挑戰 根據弗若斯特沙利文(Frost & Sullivan)報告,全球工業機器人解決方案市場規模按收入計由2020年的147億美元增加至2024年的254億美元,2020年至2024年期間,中國工業機
2025-07-12 00:10:007022 
8月6日,在北京舉辦的世界機器人大會上,上海傅利葉智能科技公司正式發布了首款主打交互陪伴、具備可觸摸特性的全尺寸人形機器人Care-bot GR3。此次發布的GR3又有哪些新變化?陪伴機器人市場規模是怎樣的?在更有溫度的人形機器人路線上,這款產品有了哪些新的方向?
2025-08-20 09:12:035580 
電子發燒友網報道(文/梁浩斌)靈巧手作為人形機器人上價值量最高的部件之一,也是人形機器人實現精細化工作的關鍵部件。靈巧手的核心是模仿人類手部的結構,實現與人類相似的靈活性,通過多關節和多模態感知去
2025-08-27 08:26:008473 64.6%。這一預測充分反映出靈巧手作為人形機器人核心部件的高增長潛力。 ? 近年來,機器人多指靈巧手在結構設計、驅動方式、感知能力等領域取得顯著技術進步。例如,部分企業通過自研減速器等手段,實現單位體積內扭矩密度的最大化,不僅提升了自由度,還降低了生產成本。這些技
2025-08-29 09:15:236109 
電子發燒友網報道(文/吳子鵬) 在機器人領域,靈巧手被眾多業者定義為“皇冠上的明珠”。近年來,靈巧手在自由度、驅動方式及傳感器集成方面取得顯著進展。MPS模擬產品線總監瞿松表示,2024年之前,靈巧手
2025-10-21 09:23:434575 
預算2W左右吧,目前了解過鈦虎/靈心巧手的產品,主要是初次涉足這個行業,比較門外漢,所以來論壇上想跟大家討論一下,求個推薦。
技術上的指標要求:
1.精度超過±0.2mm
2.負載:3KG
2025-05-08 14:45:38
現實中多設備間通信方式多種多樣(WIFI、藍牙等),不同的通信方式使用差異大,導致通信問題多;同時還面臨設備間通信鏈路的融合共享和沖突無法處理等挑戰。那么分布式軟總線實現近場設備間統一的分布式通信管理能力如何呢?分布式軟總線組件架構圖
2022-03-16 11:03:13
請各位大神指導,移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉移的?
2016-07-26 13:33:14
機器人的定義是什么?機器人優點和缺點是什么?機器人是由哪些部分組成的?工業機器人的應用有哪些?
2021-07-05 06:48:21
,可用于仿真,實例化加插用戶設計后的總綜合,總布局布線。Gowin I3C Dual Clock IP 應用于 I3C 總線通訊中,用于發送或者接收數據。Gowin I3C Dual Clock IP提供了帶有REG接口以及APB總線接口的I3C總線通訊控制器。
2022-09-30 06:08:11
自動或半自動機器人常常需要嵌入式控制系統,從而能夠結合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執行器上。NI提供了多種嵌入式硬件平臺,以滿足復雜系統的需求。從尖端的機器人研究項目直至高級行業應用,NI平臺被證實是高效的機器人解決方案。
2019-11-06 07:50:49
、同步、注冊、調用)機制。分布式任務調度程序是能夠跨多個服務器啟動調度作業或工作負載的軟件解決方案,整個過程是不需要人來值守的。舉個例子,我們可以在一臺或多臺機器上安裝分布式調度器,用戶可以通過它在
2022-07-18 17:06:45
多自由度人形雙足舞蹈機器人套件檢測教程——機器人開發系列配套資料:https://www.fengke.club/GeekMart/su_fV1WzKsGQ.jsp 配套視頻:https
2022-04-22 14:14:08
多自由度人形雙足舞蹈機器人——瘋殼·機器人開發系列套件檢測教程內容簡介本文檔主要介紹在如何驗證多自由度人形雙足街舞機器人套件正常,包括具體線路連接,實驗現象驗證。具體分為以下幾個步奏。1、機器人
2022-07-15 16:48:40
多自由度人形雙足舞蹈機器人——瘋殼·機器人開發系列套件檢測教程內容簡介本文檔主要介紹在如何驗證多自由度人形雙足街舞機器人套件正常,包括具體線路連接,實驗現象驗證。具體分為以下幾個步奏。1、機器人
2022-08-12 15:55:14
,自由度越高,也就更顯靈活。先進的伺服器具有高扭力、高轉速、高穩定、反應靈敏、無抖動、轉動角度大、耐沖擊等優點。有的人形機器人已能完成手臂后擺90度等高難度動作,還擁有觸覺和手眼配合能力,會抓物品、開門
2016-05-12 09:55:07
有沒有人知道什么是拖拽式機器人,其具體定義是什么
2016-03-11 09:20:00
顯著提升了人形機器人的性能和可靠性。例如,在靈巧手部位,伺服電動缸的集成使得每根手指都能實現精準的運動控制,從而提高了抓取和操作的精度。此外,伺服電動缸還具有節能、低噪音、高剛性等優點,能夠適應惡劣環境
2025-02-06 09:04:39
其設計是機器人研究的核心。該控制系統通常以MCU、 DSP等為核心,采用上、下位機二級分布式結構。其中上位機一般為PC機,下位機為單片機或DSP等微控制器。但隨著移動機器人的智能化,控制方法的發展,所需
2019-07-30 07:02:31
一、什么是分布式軟總線呢?分布式軟總線是HarmonyOS架構中最底層的技術分布式軟總線是HarmonyOS的大動脈二、開發跨端應用,開發者們是否面臨以下挑戰:1.跨端操作需要每次重復建立連接2.
2020-12-24 10:43:02
S5P6818處理器的嵌入式核心板:FET6818-C核心板。基于飛凌FET6818-C核心板,機器人上位機方案實現如下:運行Android5.1系統LVDS:1路,配10.1吋電容觸摸屏RS232:5路,分別接
2017-08-11 15:21:51
嵌入式平臺,它就是飛凌嵌入式推出的搭載了SAMSUNG Cortex-A53架構八核S5P6818處理器的嵌入式核心板:FET6818-C核心板。基于飛凌FET6818-C核心板,機器人上位機方案實現如下
2017-06-05 17:49:52
隨著人口老齡化進程的加快,更多老年人,尤其是地震和疾病致殘的殘疾人,都需要照顧。基于此,這里提出一種基于ARM的嵌入式服務機器人控制系統設計。該服務機器人的控制系統是機器人的神經中樞,因而其設計是機器人研究的核心。該控制系統通常以MCU、 DSP等為核心,采用上、下位機二級分布式結構。
2019-10-15 08:03:16
模塊化的控制系統體系結構:采用分布式CPU計算機結構,分為機器人控制器(RC),運動控制器(MC),光電隔離I/O控制板、傳感器處理板和編程示教盒等。機器人控制器(RC)和編程示教盒通過串口/CAN總線
2018-11-23 10:40:38
`深圳智能人形機器人知名品牌指定合作供應商,專業提供AI智能機器人結構器件散熱、導電屏蔽材料、緩沖減震泡棉、粘接固定雙面膠材料的整體解決方案,產品工程聯系:159-8987-5611導熱系列:導熱
2019-08-30 14:48:34
。2. 方案功能(1)手機遠程控制。用戶可以通過手機微信對掃地機器人進行遠程操控。(2)智能語音系統。可以通過語音控制掃地機器人。(3)智能指令控制系統。用戶可以通過手機微信向掃地機器人發送控制指令,如
2017-05-27 13:31:20
有沒有人玩過人形機器人?就是那種能跳舞的那種。我突然心血來潮,想買一個過來玩玩。編幾個程序,拿來跳舞玩玩。這種東西自己制作的話,應該也不難吧??!本來想*寶買的,但是不清楚那些東西是不是舵機搞的,特此來論壇問問
2019-01-29 06:36:05
想送給弟弟一個生日禮物,但是自己研究了很久還是個菜鳥,達不到心里的設想,所以想求助自制機器人的大神幫忙~絕對有報酬~有意者請聯系我~機器人要求:400mm——200mm高度;人形機器人;可自動做出
2015-09-06 12:49:12
機甲大師機器人的軟件架構設計如何實現?
2021-11-22 07:55:21
第七屆工訓賽水中機器人電控方案設計
2021-11-12 07:00:21
近日, 搭載KaihongOS的“夸父”人形機器人通過OpenAtom OpenHarmony(以下簡稱“OpenHarmony”)3.2 Release版本兼容性測評并獲頒兼容性證書 。這體現了
2023-12-20 09:31:19
提出了一種人手掌的簡化模型,根據該模型,設計了仿人靈巧手掌的機構,使得只作為仿人靈巧手手指及其控制部件機架的手掌形成弧形自由度參加手部動作,提高了仿人靈巧手通
2009-08-13 10:10:02 22
22 HJL系列行星滾柱絲杠線性關節模組? 專為人形機器人應用研發,提供定制化服務? 集行星滾柱絲杠、電機、編碼器、拉壓力傳感器于一體? 強大推力,性能強勁,穩定可靠? 精巧結構設計,整體輕量化程度進一步
2025-02-21 14:55:54
HJR系列帶力控旋轉關節模組? 專為人形機器人應用研發,提供定制化服務? 集諧波減速器、電機、抱閘、編碼器、驅動器、扭矩傳感器于一體? 創新的諧波減速器結構,讓關節模組整體輕量化程度進一步提升
2025-02-21 14:59:52
結構設計,更輕、更小、更緊湊? 快速組裝人形機器人手臂,大幅縮短開發周期 人形機器人手臂輕量化人形機器人關節人形機器人關節參數
2025-02-21 15:04:19
工業機器人分布式控制系統實例介紹了澆注生產線浮渣鏟除工業 機器人 分布式控制系統的設計方案、硬件結構和軟件體系工業機器人分布式控制系統是一種比較理想的快速實時控制系
2011-07-13 12:04:34112 介紹了分布式控制系統和CAN總線的概念和特性。提出了一種用于智能機器人的分布式控制系統結構,時基于該控昔對系統的智能機器人的體系結構、導航與控制、環境感知進行了研究。
2012-04-25 14:57:5355 X-MEN I型人形機器人組裝說明書,零基礎學機器人開發,由淺學習逐漸深如控制原理!
2015-11-02 16:09:251 基于分布式控制系統的輪式智能機器人研究電子論文!資料來源網絡,如有侵權,敬請見諒
2015-11-30 11:34:035 基于現場總線的分布式智能機器人感知系統研究!資料來源網絡,如有侵權,敬請見晾
2015-11-30 11:31:328 機器人靈巧手抓持分類器的設計與實現.....
2015-12-23 15:00:188 基于虛擬現實的機器人靈巧手遙操作平臺的設計和實現
2015-12-23 14:59:3618 通用智能機器人分布式控制系統的設計與實現!資料來源網絡,如有侵權,敬請原諒!
2015-12-25 09:35:255 智能機器人靈巧手的研究!資料來源網絡,如有侵權,敬請原諒!
2015-12-25 09:52:074 仿人機器人混聯靈巧手臂設計及運動學逆解研究_秦利
2017-01-08 11:20:200 仿人靈巧手應用于中醫按摩領域,對手部的靈巧性有很高的要求,機器人動力學逆問題的研究旨在改善機器人控制系統工作的穩定性和控制精度,實現對靈巧手的最優控制,達到良好的動態性能和最優指標。 文中研究的對象
2017-11-16 14:20:4416 來自豐田的人形機器人 T-HR3 ,它十分靈巧,擁有多個自由度。在人類遠程遙操作下可以實現從護理、搬運、環境探索甚至外層空間考察等一些列任務。在保證人類安全的前提下充分利用了機器人的精度的強度。 1
2017-12-26 12:16:002243 為了實現機器人應用系統的協調問題,實現多個控制模塊之間的通信,現設計并實現了一種基于UART的機器人分布式控制通信協議。硬件上采用RS-485型電氣接口,分析了控制網絡的信息模型,實現了令牌環控制
2018-12-19 16:46:547 過去兩年,當國內服務機器人企業想為自己的機器人裝上手時,發現小小一只手掌價格動不動就是超10萬元/臺以上,這讓很多機器人企業望而卻步。而且國內大多靈巧手產品都是海外進口。
2019-06-07 13:30:005058 LOLA的人形機器人是慕尼黑工業大學機械工程系正在研究構造的一種能夠快速、類似人類自主行走的機器人,他們通過改進視覺感知和步行控制的整合來解決機器人的自主性問題。
2021-04-22 09:25:283938 
將虛擬現實技術應用機器人臂/靈巧手遙操作系統中,完成了環境建模、人機接口、精確的圖形碰撞檢測和抓握穩定性分析,并實現了對虛擬環境中模型的實時誤差校正。利用該虛擬現實系統,結合視覺反饋和力反饋,完成了按按鈕、拉抽屜、抓握燈泡等遙操作任務。
2021-05-06 15:51:2522 什么是分布式系統? 1.分布式系統一定是由多個節點組成的系統。 2.這些連通的節點上部署了我們的節點,并且相互的操作會有協同。 隨著應用架構演進, 分布式架構有哪些 1.傳統垂直架構 2.RPC架構 3.SOA服務化架構 4.微服務 整合自:CSDN、簡書 編輯:jq
2021-07-31 09:54:038030 電子發燒友網站提供《Gowin I3C SDR IP參考設計.pdf》資料免費下載
2022-09-15 14:22:324 人形機器人發展現狀 人形機器人的概念由來已久。不管是科幻小說還是電影里,我們時常可以見到人類與人形機器人共存、共生的精彩場景。沒有誰不期待科幻電影中的人形機器人成為現實。 長久以來,大家往往聽到人形
2023-01-06 14:37:362333 總線上可以支持的設備有: Main Master(當前主設備) Secondary master(輔助主設備) i3c Slave(i3c從設備) i2c Slave(i2c從設備) I3C 特性寄存器描述并定義了 I3C 兼容設備在
2023-07-22 16:13:204893 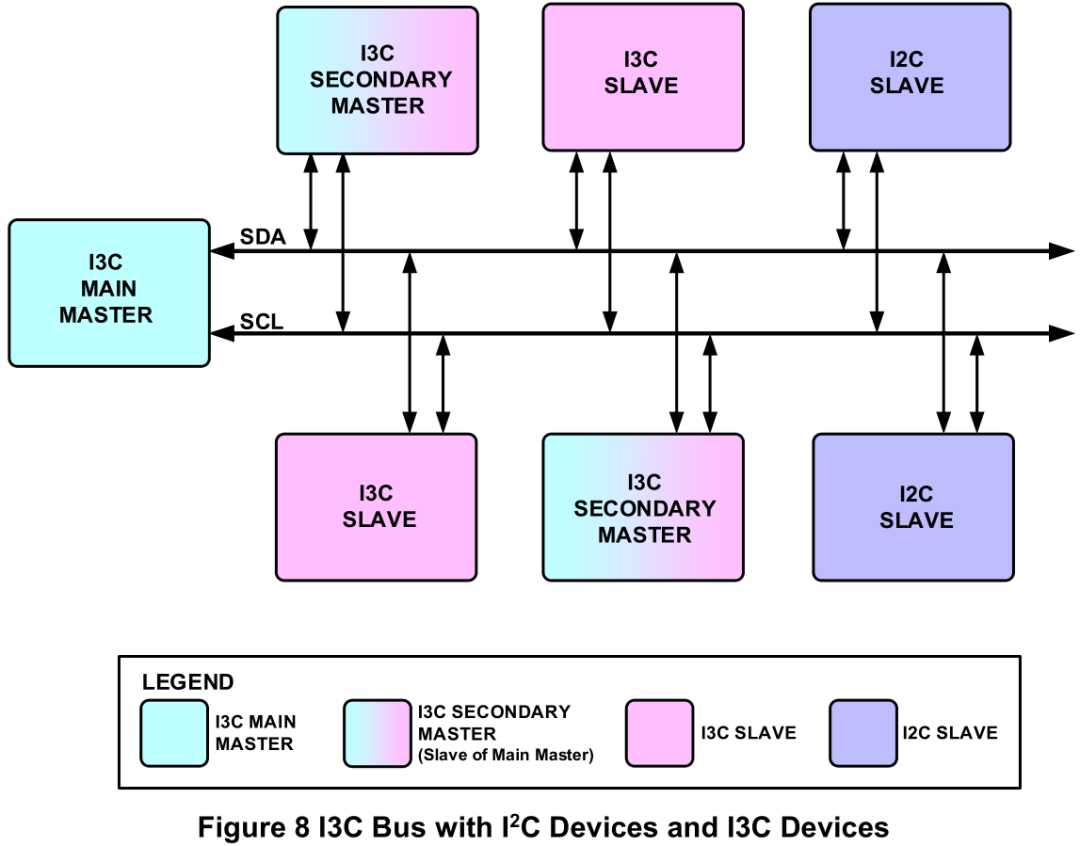
I3C Introduction I3C :Improved Inter Integrated Circuit ,是 MIPI(Mobile Industry Processor Interface
2023-07-22 16:16:411497 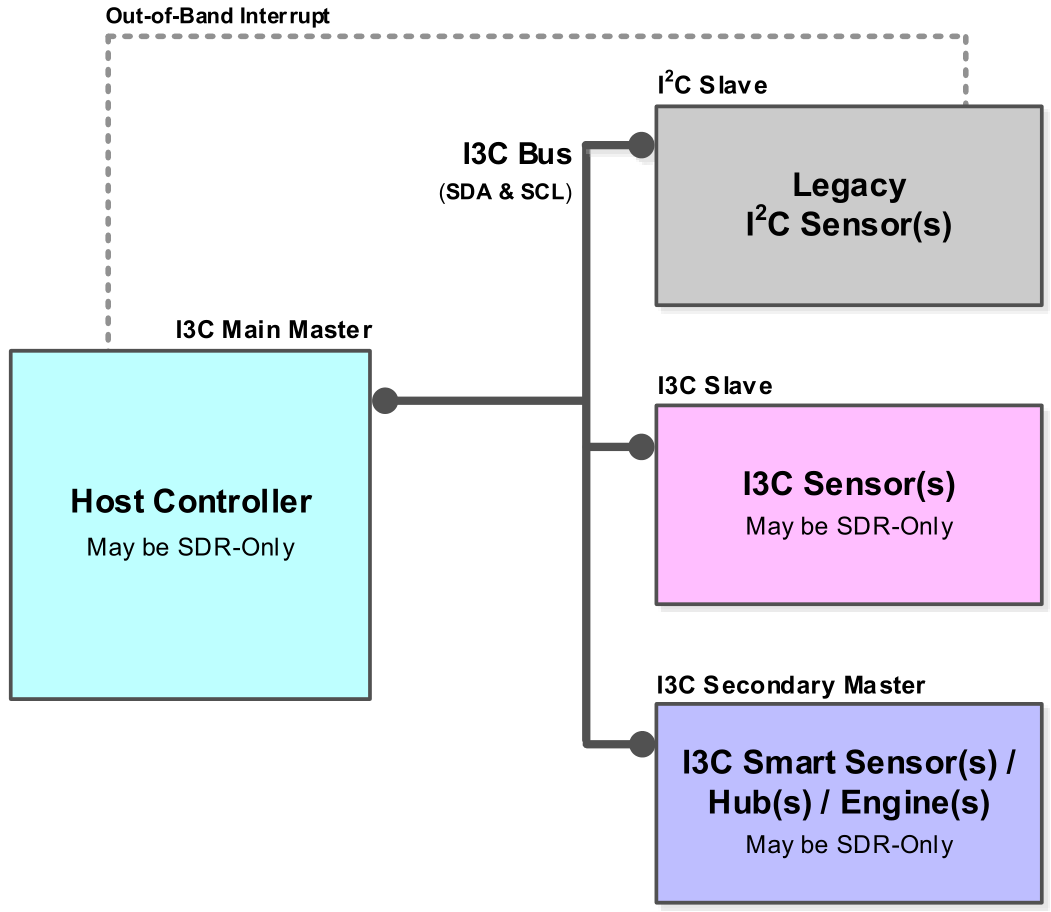
I2C 和 I3C 主要區別如下: I2C 雖然也是兩條線,但是很多時候傳感器需要一條額外的中斷線,來告訴主控數據已經準備好。I3C 允許從設備直接在總線上產生中斷,不再需要一條額外的中斷
2023-07-22 16:20:209076 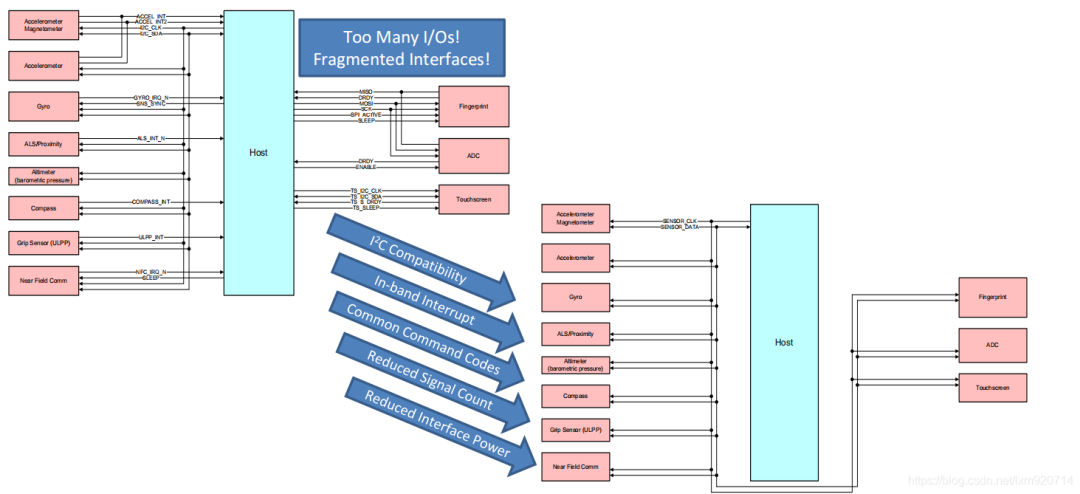
I2C 和 I3C 關于功耗和傳輸速率的對比: I3C 使用推挽功能的雙線串行接口,速度可達 12.5 MHz I3C 同一總線上共存的傳統 I2C 設備(有一些限制) I3C 動態尋址,同時支持
2023-07-22 16:24:052924 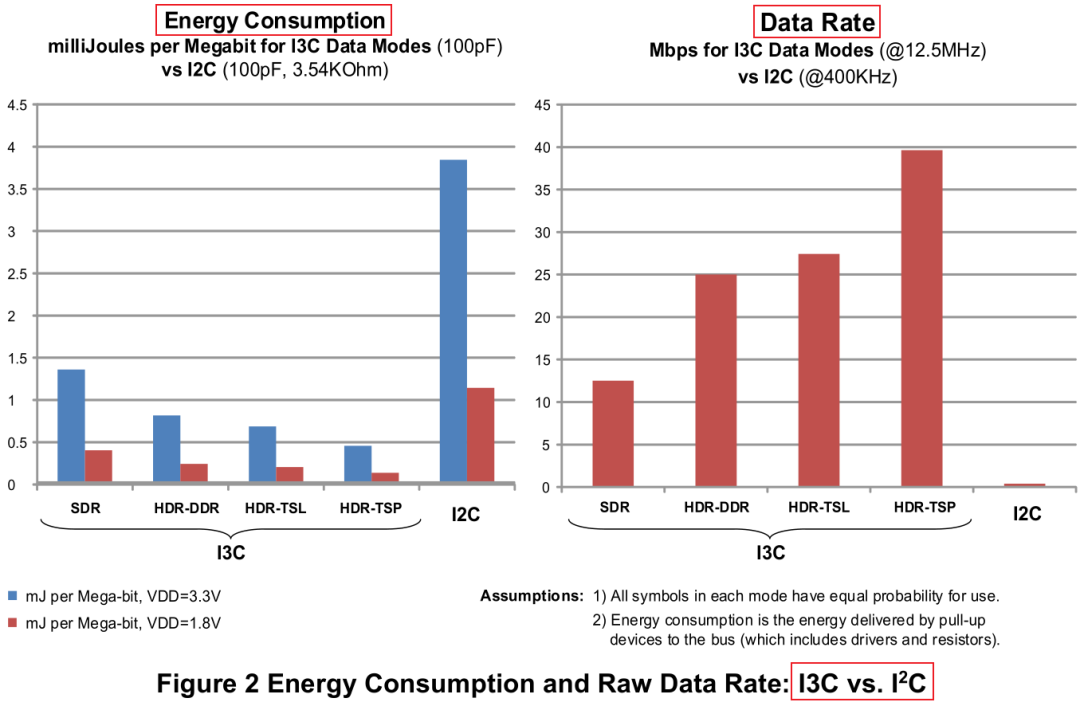
隨著人工智能(AI)技術的不斷發展,機器人領域迎來了前所未有的技術變革。尤其是由AI技術賦能的人形機器人,在人機交互、服務行業、醫療保健等領域的應用前景日益受到業界的關注。不久前
2023-09-06 08:29:531983 
是一種采用無鐵芯轉子的直流永磁伺服控制電機,在小功率段功率密度最大。它的技術壁壘、價值量均高于通用交流伺服電機,非常適合應用于空間狹小的人形機器人靈巧手。 圖:空心杯電機結構示意圖 相對傳統直流電機,空心杯電
2023-10-09 15:16:251390 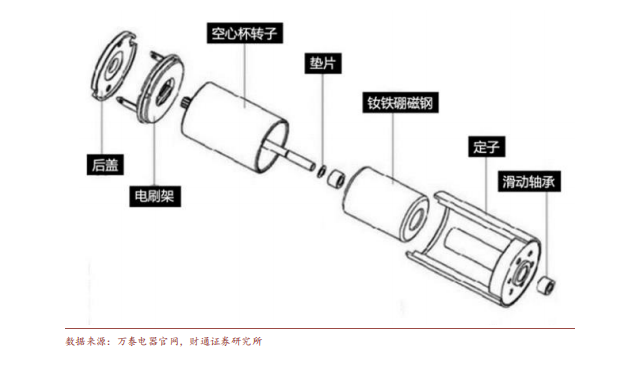
2023年,受Tesla人形機器人Optimus擎天柱的引領,全球范圍內人形機器人如雨后春筍般涌現,吸引了資本和產業鏈的緊密關注,國內也有不少企業順勢推出了各自的人形機器人產品。不過市場熱度過后逐漸
2023-10-18 15:32:231549 隨著人形機器人的快速發展和普及,其對于靈活操作的需求也日益增長。而靈巧手作為人形機器人的重要組成部分,其市場機遇與空心杯電機的技術發展緊密相連。本文將從人形機器人的發展、靈巧手的技術路線、空心杯電機
2023-11-21 14:43:141434 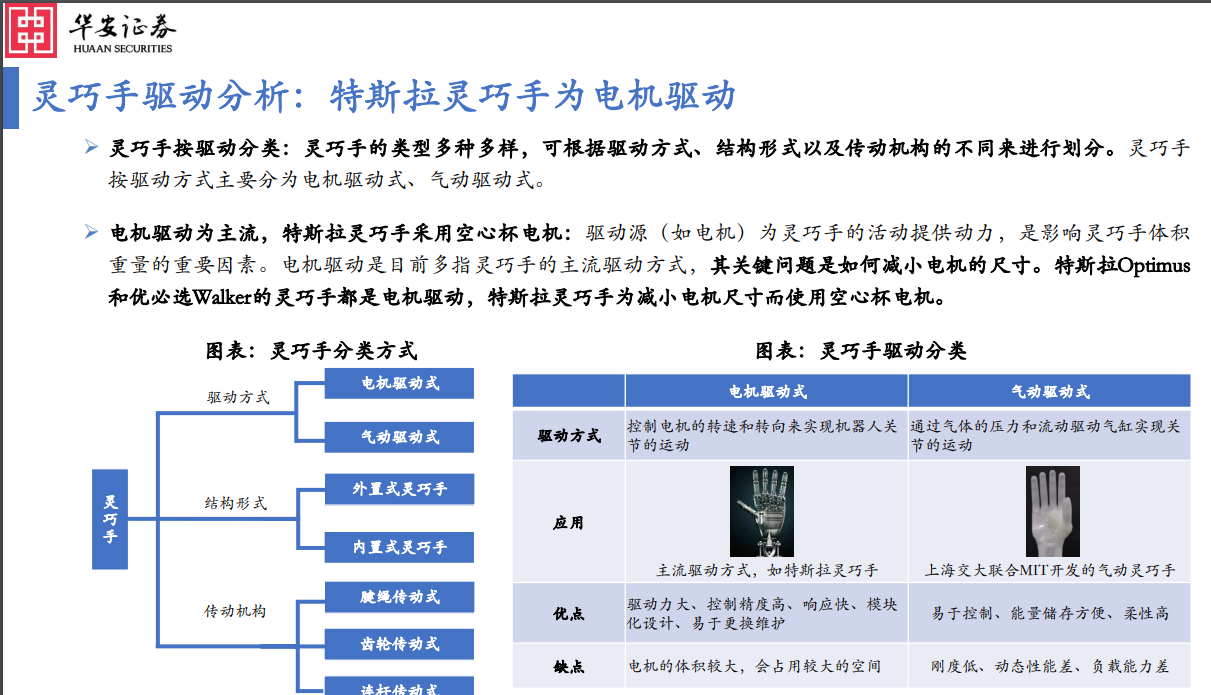
1.獨立性:分布式架構中的各個節點是獨立運行的,它們沒有依賴關系,可以單獨進行升級、維護和擴展。 2.通信性:分布式架構中的各個節點通過網絡連接進行通信和協作,以實現數據的傳輸和共享。 3.負載均衡:分布式架構中的各
2024-01-12 15:04:392254 
2023年被稱為人形機器人產業化的“破曉時刻”,行業迎來爆發式增長,眾多企業紛紛推出各自的人形機器人產品。
2024-02-21 10:33:281968 現在的人形機器人不僅形態更接近人類,而且具備更多的智慧。隨著大型AI模型的不斷推進,人工智能正在加速人形通用機器人的量產和落地。
2024-02-22 09:22:52671 
I3C接口使用兩根通信線,一根是數據線(SDL),另一根是時鐘線(SCL)。與I2C總線一樣,I3C接口也支持多主設備(Main Master)和從設備(Slave)之間的通信。
2024-03-05 16:50:524795 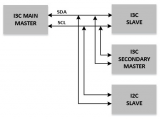
搬運機器人后推出的又一款突破性“巧手”產品,據悉,該機器人采用新一代視觸覺傳感+靈巧操作技術,旨在幫助人類完成更多任務挑戰。“心靈手巧”陣營再添一員。 01 “心靈手巧”的戴盟Sparky 1 在常見的人形機器人中,往往重點展示的是它們的運動能力。
2024-03-22 14:46:11940 
人形機器人在各個發展時期,都致力于在“仿人特征”上有一些突破。盡管有的人形機器人穿上衣服可以達到“以假亂真”的程度,但仔細觀察就不難發現,幾乎所有的人形機器人,其膝蓋都呈現彎曲狀態。
2024-04-09 10:54:301258 I 2 C 和 I3C之間顯著的變化是時鐘速度。I 2 C 通常為 100 kHz、400 kHz 或 1 MHz,而 I3C 可以達到高達 12.5 MHz 的速度。這種增長的主要因素之一是在 I3C 中使用推挽輸出。I3C 根據總線狀態在漏極開路和推挽驅動器之間切換。
2024-05-03 10:22:005982 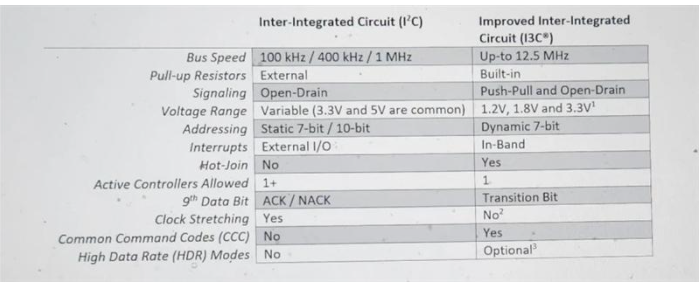
8月2日,日本科技界傳來新突破,立命館大學攜手滋賀縣草津市的“人機一體”機器人創新企業,共同揭幕了一款革命性的人形機器人。這款機器人以其卓越的自適應平衡能力,在未預先測繪環境的情況下,通過遠程精準操控,展現了前所未有的靈活性與安全性。
2024-08-02 17:08:401402 電子發燒友網站提供《優秀實踐:I3C共享總線上的I2C器件.pdf》資料免費下載
2024-09-06 09:49:370 的地域分布情況,包括人形機器人企業的主要產品、城市分布、供應鏈環節,為行業內外提供了寶貴的數據支持和市場洞察。 ? 根據最新發布的產業地圖,國內的人形機器人產業鏈企業分布廣泛,遍及全國多個省份和城市,形成了各具特色的產業集群。從
2024-12-02 09:17:063068 
近日,虹科與SeedRobotics正式建立合作伙伴關系,雙方將在機器人靈巧手領域展開深入合作,共同推動人工智能、神經科學、心理學和認知科學等領域的創新研究與應用發展。此次合作,虹科
2024-12-05 01:00:501288 
近日,鳴志公司正式推出了兩款全新高速無齒槽電機——ECH10032和ECH10025。這兩款電機的發布,標志著鳴志在電機技術領域的又一次重大突破,同時也為人形機器人的靈巧手應用發展注入了新的活力
2024-12-24 14:43:551195 黑芝麻智能、NESINEXT以及傅利葉聯合展示基于黑芝麻智能C1200家族芯片的通用人形機器人“靈巧手”具身智能硬件產品。
2025-01-09 15:13:071466 在人工智能與機器人技術飛速發展的當下,人形機器人具身智能研究正成為科技領域的前沿熱點。隨著人形機器人的應用場景不斷增多,如何使人形機器人實現更加擬人化的形態和與物理世界進行更精細的交互,成為當下人形機器人發展的重要方向。
2025-01-21 11:54:041118 
,宇樹科技的人形機器人G1型號為G1-001,主要使用場景為娛樂陪伴。它擁有2至4小時的續航時間,體重約35千克,身高達到127厘米。機器人配備了3指力控靈巧手和23至43個關節電機,以及先進的3D激光雷達等技術,展現了宇樹科技在機器人領域的強大
2025-02-13 09:46:211089 人形機器人供應鏈來看,靈巧手、絲杠、減速器、傳感器、電機、控制器等都是值得重點關注的高價值環節,本文將對各大核細分環節進行逐一拆解。 一、人形機器人關節(關節部分整體成本占比約55%,主要包括
2025-02-20 10:45:063626 
“做好一只靈巧手的難度未必比做好一個足式人形機器人整機的難度小。”高工機器人產業研究所所長盧瀚宸認為。
2025-02-26 10:25:471539 人形機器人又稱仿生機器人,是一種模仿人類外形的機器人,除具備人形和模擬人類動作外還兼具智慧化和可交互性等特點。人形機器人的核心技術模塊包括環境感知模塊、運動控制模塊和人機交互模塊。▲人形機器人核心
2025-04-02 16:56:092202 
) 人形機器人具備旋轉關節、線性關節、感知系統(各類傳感器)、整體軀干(機械臂、動力源)、靈巧手等關鍵部件實現對環境的感知交互、運動控制、任務執行。電機是旋轉關節、線性關節和靈巧手等關鍵部件的核心零部件,與關節運動
2025-05-30 13:25:141456 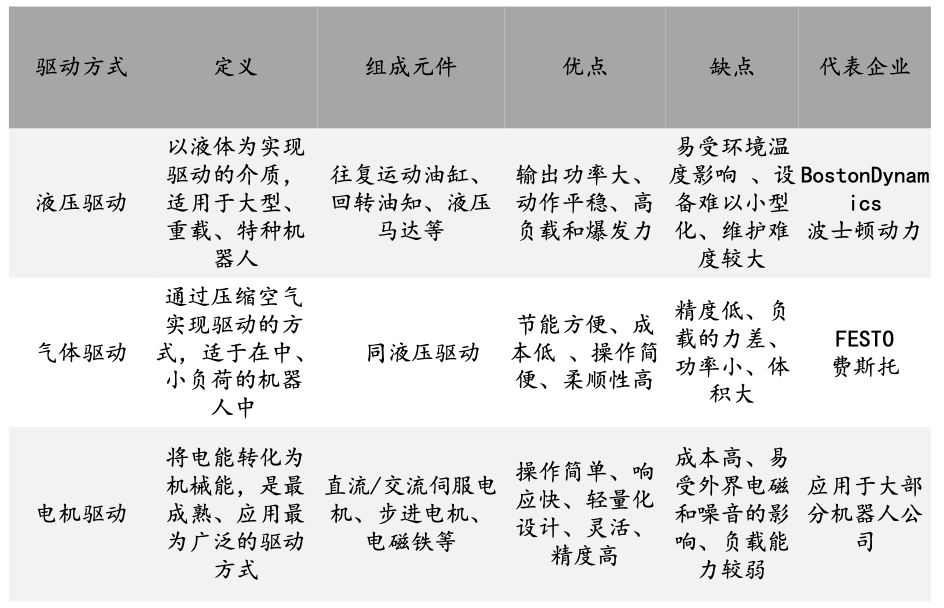
全球首個以人形機器人為參賽主體的 CMG 世界機器人格斗擂臺考驗機器人動態平衡等技術。技術決勝維度包括超低延遲、多模態融合、抗干擾設計。虹科提供全棧式解決方案,涵蓋 PCAN、EtherCAT 方案及靈巧手,助力人形機器人應用落地,提供全流程技術支持
2025-06-03 13:25:46588 
思科技表示,公司在 2016 年即成立智能機器人公司,研發和大規模量產工業機器人、機械臂、靈巧手。2024 年迅速與國內外頭部人形機器人公司合作,量產人形機器人,開發頭部、靈巧手、關節電機等關鍵模組。 ? 在設計和研發方面,公司與客戶
2025-08-05 15:46:503477 8月9日,2025世界機器人大會(WRC)現場,深圳賽博格機器人有限公司正式發布全球首款輕量化仿生靈巧手Cyborg-H01。這款僅重500克卻能承載10公斤負載的核心部件,一舉打破重載人形機器人
2025-08-11 10:08:011017 
,詳細闡述了MR30 分布式 IO 解決方案,最后總結了該方案的應用成效。? 生產工藝介紹? 噴繪機器人的工作流程主要包括加載噴涂程序、工件安裝、噴涂、監控與調整、噴涂完成于清理等環節。? 【開機與初始化】 打開電源,啟動機器人控
2025-08-15 13:48:34460 
近年來人形機器人技術迎來爆發式增長,全球科技巨頭和中國本土企業都在加速升級迭代人形機器人產品和相關技術,推動機器人在工業、物流、醫療、教育和家庭等領域的廣泛應用。
2025-10-10 10:21:412004 
技術突破層出不窮。然而,隨著人形機器人逐步走向產業化,其底層控制系統的需求也日益復雜,特別是在需要支持多自由度關節、實時反饋與分布式架構的情況下,如何選擇一款高效、
2025-10-22 17:36:50917 
10月23日領益智造在互動平臺透露;人形機器人業務已經產生收入;目前已獲得海內外機器人客戶的硬件訂單,包括有零部件、靈巧手、關節模組、整機組裝等。但并未透露海外具體的客戶名稱,以及具體的訂單金額
2025-10-23 11:29:12594 是機器人靈巧手,是人形機器人上的關鍵零部件。 ? 目前國內有多家企業已經具備了相關核心技術與產業化能力,近期,兆威機電更是展出了自己的機器人靈巧手,讓業內外一探當前機器人靈巧手技術的發展程度。 ? 兆威機電發展多自由度
2024-11-15 00:08:007415 
電子發燒友網報道(文/黃晶晶)靈巧手是人形機器人核心零部件之一,以人類的手來看通常被認為具有27個自由度,自由度越高,其動作越精細。特斯拉二代Optimus的靈巧手已經擁有22個自由度。 靈巧手
2025-04-21 09:04:583784 
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論