 EtherCAT?技術前瞻:人形機器人通信的新選擇!
EtherCAT?技術前瞻:人形機器人通信的新選擇!

近年來,隨著人形機器人逐漸從實驗室走向實用化,其相關新聞頻繁占據技術頭條。從高校比賽、企業研發推進到亮相春晚舞臺,從仿生步態研究、智能交互開發到參與近期運動競賽(如馬拉松、RoboCup等),各種技術突破層出不窮。
然而,隨著人形機器人逐步走向產業化,其底層控制系統的需求也日益復雜,特別是在需要支持多自由度關節、實時反饋與分布式架構的情況下,如何選擇一款高效、穩定的底層通信協議成為至關重要的課題。
在這一過程中,EtherCAT(Ethernet for Control Automation Technology)憑借其高實時性和靈活的拓撲結構,成為構建人形機器人運動控制系統的理想選擇。
目前EtherCAT在人形機器人領域的應用還在探索階段,然而,其在工業機器人中的廣泛應用,已充分證明了其在多軸同步、實時數據傳輸和大規模節點協同方面的巨大優勢。作為EtherCAT技術棧的重要推動者,acontis的產品為開發者提供了完備的支持,助力機器人控制系統的優化與創新。
一、EtherCAT技術概述與核心優勢
EtherCAT是一種基于以太網的實時工業通信協議,旨在滿足高速、高同步和多節點控制的需求。與傳統的以太網通信協議不同,EtherCAT采用了獨特的數據幀傳輸方式,能在短時間內完成多個節點間的實時數據交換,顯著提升系統的效率和響應速度。
核心優勢:
-微秒級實時性
數據處理主要通過在硬件層面完成,降低了傳輸延遲。對于需要高頻率和高精度控制的系統,EtherCAT能提供微秒級實時的響應能力。
-分布式時鐘同步
EtherCAT的分布式時鐘技術能夠確保各個節點的時間同步精度可達到亞微秒級,適合需要多軸協調控制的應用場景。
-靈活的拓撲結構
EtherCAT支持多種網絡拓撲結構,包括線型、星型、樹型等。這使得它能夠適應各種復雜的機器人系統,尤其是在分布式控制器部署上具備高度靈活性。
-高帶寬與低開銷
數據幀傳輸一次即可覆蓋所有節點,避免了傳統協議中的數據重復傳輸,大幅提升了帶寬利用率,并降低了網絡負擔。
-支持上百節點
EtherCAT支持數百個從站設備連接,能夠滿足人形機器人中多自由度關節和大量傳感器的需求。
這些特性使EtherCAT在工業自動化、機器人控制、醫療設備等領域廣泛應用,也為人形機器人提供了堅實的通信基礎。
二、EtherCAT技術落地與高效驗證工具
作為EtherCAT主站協議棧的領先提供商,acontis推出的高性能協議棧EC-Master以及易用的開發工具EC-Engineer。
這些工具不僅廣泛應用于工業自動化領域,在機器人系統中同樣具有顯著優勢。在機器人系統通信中,acontis的EtherCAT協議棧能夠高效支持從多自由度關節的同步控制到傳感器數據反饋的實時處理,確保機器人能夠進行高精度、低延遲的控制。
核心組件:
-EC-Master協議棧
作為acontis的核心產品,EC-Master提供了高度優化的EtherCAT主站協議棧,支持Windows、Linux RT、QNX、VxWorks等多個操作系統平臺。無論是在嵌入式控制器上,還是在工業PC上,EC-Master都能高效運行,滿足各種控制精度要求。
-EC-Engineer調試工具
EC-Engineer是一款圖形化調試與配置工具,支持從站掃描、PDO映射、診斷分析等功能。通過簡化配置和調試過程,幫助開發者提高開發效率。
-實時擴展支持
在標準Windows環境下,acontis提供了成熟的實時擴展方案來實現精確的周期調度,確保控制任務能夠按時執行,滿足高精度控制的需求。
-仿真與診斷接口
為了幫助開發者快速驗證系統的穩定性,acontis推出了支持虛擬從站、拓撲導入和在線診斷等功能的可視化產品,使得開發者能夠在無硬件環境下進行仿真測試,并實時監控系統性能。
三、人形機器人中的運動控制需求與EtherCAT的適配性討論
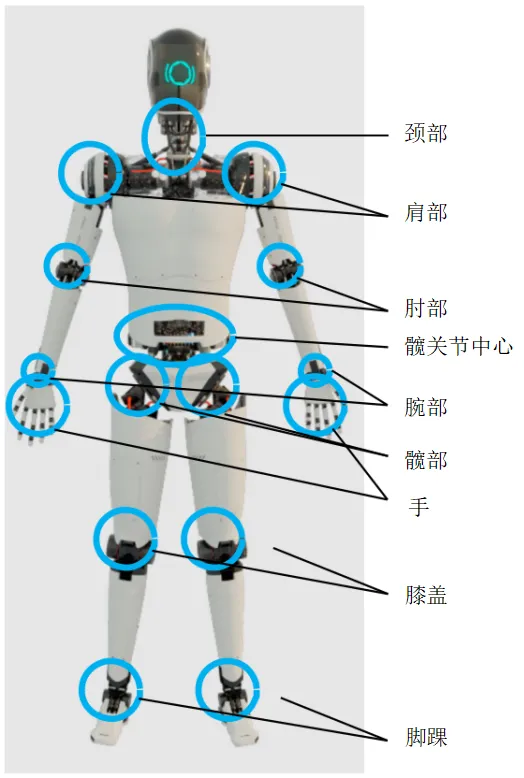
人形機器人控制系統的復雜性遠超傳統的機械臂,其步態規劃、力控反饋和實時姿態調整等任務對精度與同步性要求極高。為應對此類挑戰,EtherCAT憑借其高同步性、低延遲和高帶寬特性,正可滿足其需求。
典型任務:
-步態規劃與多關節插補
需要協調多個關節同時運動,要求極高的同步精度。EtherCAT的分布式時鐘同步機制能夠確保各個關節在步態變化過程中保持精確的同步,從而避免運動中的不協調性。
-力控反饋與傳感器融合
在人形機器人中,觸覺、視覺、慣性傳感器等實時數據的采集與反饋至關重要。EtherCAT的低延遲傳輸特性,確保了實時數據處理和反饋控制,極大提升了機器人的交互精度和反應速度。
-實時姿態調整與環境響應
機器人需要根據外部環境的變化迅速調整姿勢,EtherCAT的高帶寬和實時性使得機器人能夠在最短時間內作出反應,確保運動的準確性和穩定性。
四、運動控制庫(EC-Motion)介紹:從協議到執行的橋梁
在EtherCAT網絡中,運動控制的實現不僅依賴于硬件協議棧,還依賴于控制邏輯的良好配合。acontis提供了一套完整的運動控制接口,能夠幫助開發者高效實現機器人控制任務。

核心功能:
-CoE協議支持
通過CoE(CANopen over EtherCAT)協議,EC-Motion實現了SDO/PDO數據交換,從而方便開發者進行參數配置和實時數據傳輸。
-與第三方控制庫集成
EC-Motion支持與ROS、TwinCAT、自研控制器等運動控制系統的集成,幫助開發者在EtherCAT的基礎上實現更高層次的運動規劃與執行。
-模塊化設計
acontis的協議棧采用模塊化設計,主站初始化、從站配置和周期任務調度等功能被清晰分離,而運動控制庫EC-Motion也可以作為擴展一同成為落地方案的一部分,便于維護和擴展,減少了開發者的工作量。
-調試與診斷工具
提供在線監控、錯誤分析和性能評估功能,幫助開發者實時檢查系統狀態,確保運動控制任務能夠順利完成。
五、FAQ:常見問題解答
-EtherCAT 拓撲結構是否支持機器人?
- 支持,EtherCAT 支持線型、樹型、星型等多種拓撲結構,尤其適合分布式機器人控制器的部署。
-EtherCAT 是否能夠支持穩定傳輸?
- 由于其高帶寬、低延遲和強實時性的特性,EtherCAT 非常適合進行高頻率的數據傳輸與實時反饋控制。
-acontis是否支持在Windows環境下開發EtherCAT主站的方案?
- 支持,acontis提供在 Windows 環境下運行EtherCAT的解決方案,幫助開發者通過實時擴展方案實現Windows環境下的部署與開發。
-人形機器人技術前景如何?
- 隨著 AI、傳感器與控制系統的發展,人形機器人正逐步從實驗室走向產業化。底層控制系統的穩定性和擴展性將成為其核心競爭力之一。
結語:從底層通信看人形機器人未來
隨著人形機器人技術的不斷成熟,底層控制系統的選擇對其性能和可靠性起著決定性作用。EtherCAT作為一種高效、實時的通信協議,憑借其天然的優勢,正成為越來越多開發者的首選。acontis提供的技術棧不僅為EtherCAT的應用提供了堅實的基礎,還為開發者提供了一個靈活、可擴展且易于調試的解決方案。
展望未來,隨著人形機器人在智能制造與人機交互中的應用日益廣泛,EtherCAT將在這一領域發揮越來越重要的作用,助力機器人方案的多樣化推進與經驗擴展。
-
機器人
+關注
關注
213文章
31073瀏覽量
222162 -
工業自動化
+關注
關注
17文章
3125瀏覽量
69878 -
ethercat
+關注
關注
19文章
1507瀏覽量
45164
發布評論請先 登錄
人形機器人制造業領域應用的趨勢:技術突破與市場前景
德州儀器人形機器人技術線上研討會精彩回顧
國民技術亮相2025人形機器人國際峰會

深度解讀人形機器人電感產品需求及應用選型技巧
共繪具身智能未來,ADI攜手產業伙伴舉行人形機器人媒體分享會

最新發布!泰科機器人發布首款自研雙足人形機器人

工業人形機器人價格區間:賦能智能制造的新選擇

藍思科技:今年承接智元機器人全系列多款人形機器人業務
虹科分享 功夫機器人來了!CMG擂臺之上的技術決勝點是什么?
NVIDIA 通過云端至機器人計算平臺驅動人形機器人技術,賦能物理 AI

馬拉松賽場“掉鏈子”?解鎖人形機器人通信穩定秘籍!

EtherCAT通訊協議與網關模塊推動人形機器人的智能大變革

EtherCAT科普系列(4):EtherCAT技術在人形機器人靈巧手領域應用

黑芝麻智能引領人形機器人技術邁向新高度
從技術到市場,致遠電子EtherCAT通訊卡如何推動人形機器人前行?



 工商網監
工商網監
評論