 “芯片+算法+系統”三位一體,讓靈巧手無懼空間挑戰
“芯片+算法+系統”三位一體,讓靈巧手無懼空間挑戰

電子發燒友網報道(文/吳子鵬) 在機器人領域,靈巧手被眾多業者定義為“皇冠上的明珠”。近年來,靈巧手在自由度、驅動方式及傳感器集成方面取得顯著進展。MPS模擬產品線總監瞿松表示,2024年之前,靈巧手方案基本為6個自由度,如今大部分方案已達到15個自由度以上,最高可至21個。如何在手掌大小的空間內裝入15個乃至20+個電機,對整個行業而言都是巨大挑戰。
在MPS人形機器人解決方案發布會上,該公司除介紹一系列可用于人形機器人的IC方案外,還展示了驅控一體式電機,尤其重點呈現了面向靈巧手應用的空心杯一體式電機方案。
作為人形機器人的核心部件,靈巧手的自由度、操作精度及價值占比正持續提升。根據MPS分享的數據,若人形機器人采用12個自由度的靈巧手,其方案將包含12個空心杯電機、12個行星減速器、12個6D力矩傳感器及12個編碼器,該套方案在人形機器人整體方案中的成本占比約為17.2%。隨著自由度的提升,這一占比將進一步攀升,設計難度也隨之陡增。
要實現類似人類手部關節的高度靈活性與多功能性,需設計復雜精巧的結構。例如,靈巧手每增加一個關節自由度,就需額外配備驅動單元、傳動機構及支撐結構,而人類手掌與手指的空間極為狹小,在此背景下,空心杯電機已成為主流選擇。同時,多個驅動單元同步動作時,需解決“力矩分配、動作同步性”問題——以抓握球形物體為例,指尖需同步貼合球面,若某一驅動出現響應延遲,易導致物體滑落或局部受力過大。
為破解靈巧手的設計難題,MPS在EZmotion端到端方案中,專門研發了8~16mm直徑的空心杯電機一體化設計方案。其中,MMS1RH系列產品集成了伺服驅動器、位置編碼器、永磁同步電機,SPI時鐘頻率8MHz,不僅能實現更簡潔、安全的高精度控制,還可顯著減少零部件數量及裝配成本,提升整體方案的經濟性與性價比。
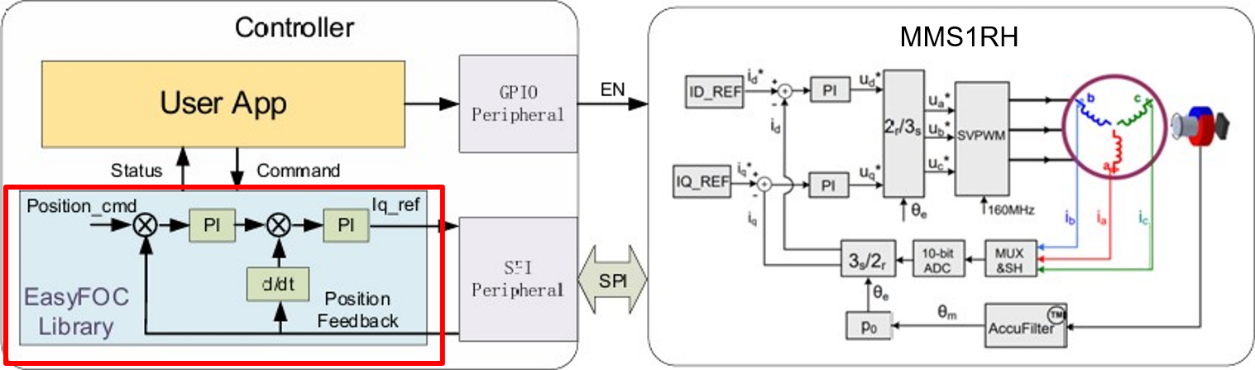
MMS1RH系列產品可獨立實現轉矩閉環控制,在配套的C語言EasyFOC庫支持下,可運行于速度控制或位置控制模式。EasyFOC庫通過SPI接口讀取電機的角度、電流、電壓反饋數據,根據客戶設定的控制模式計算對應指令并發送至MMS1RH,從而實現位置或速度閉環控制;其中,對實時性要求較高的FOC電流環控制部分,直接在MMS1RH內部完成。
此外,為進一步完善靈巧手驅動解決方案,MPS還推出了電機驅動板MMP1RH。該器件具備FOC控制功能,集成角度傳感器,尺寸超小(直徑9mm、厚度6.5mm),輸入電壓范圍為5V~18V,最大相電流2A,支持最高轉速60000rpm,配備RS485接口,具備UVLO(欠壓鎖定)、OCP(過流保護)功能,可編程開關頻率高達80kHz,角度傳感器分辨率為14bit,電流采樣ADC分辨率為10bit。
在電機驅動領域,MPS針對性推出了面向三相無刷直流電機的MP(Q)6547A和MP6543兩款產品。其中,MP(Q)6547A具備寬電壓范圍優勢,工作電壓覆蓋4V至32V;驅動能力方面,其內部集成3個半橋驅動器及6個低內阻MOSFET(高邊MOSFET內阻60mΩ,低邊MOSFET內阻50mΩ),連續輸出電流可達3A,峰值電流達6A。封裝采用QFN-18(3mm×4mm),配備可潤濕側翼,在提升散熱性能的同時有效減小PCB占板面積。
MP6543的工作電壓范圍為3V至12V,內部同樣集成3路半橋驅動器,每路MOSFET內阻110mΩ。控制便利性上,該產品支持PWM與ENBL輸入、霍爾信號輸入,內置3.3V/100mA LDO調節器,支持內部充電泵100%占空比工作,具備自動同步整流功能;為便于目標電流檢測,還集成了雙向電流檢測放大器。封裝采用QFN-24,大幅節省PCB空間。
傳感器方案方面,瞿松重點介紹了基于磁阻效應的TMR傳感器MA600A。相較于傳統霍爾傳感器,MA600A具備更高帶寬、更高精度及更低非線性誤差(INL),非常適配機器人應用場景。性能參數上,其工作電壓為3V至3.6V,通信接口支持SPI、ABZ、PWM、UVW及SSI,適配多種通信協議;支持菊花鏈配置,靈活性更高,且通過AEC-Q100認證,安全可靠性優異。體積控制上,MA600A采用QFN-16封裝,直徑僅3mm,可輕松裝配于靈巧手各關鍵位置;同時支持同軸或離軸安裝,能適配不同機器人的機械結構差異。
這些性能領先的元器件,共同構成了MPS EZmotion端到端方案的核心基礎。瞿松表示:“對于MPS而言,我們致力于確保在機器人所有關鍵部件領域,都能提供成熟的解決方案,憑借MPS獨特的技術優勢,助力方案商打造高功率密度、高效率、小體積的人形機器人方案。”
在MPS人形機器人解決方案發布會上,該公司除介紹一系列可用于人形機器人的IC方案外,還展示了驅控一體式電機,尤其重點呈現了面向靈巧手應用的空心杯一體式電機方案。
8~16mm直徑高度集成空心杯一體式電機
相關統計數據顯示,2024年全球靈巧手市場規模約為76萬只/17億美元,預計2030年將達到141萬只/30億美元,年復合增長率為14.5%。從產業鏈結構來看,機器人靈巧手行業上游為零部件供應環節,涵蓋空心杯電機、減速器、傳感器、控制器、光學編碼器、絲杠、腱繩等;中游為機器人靈巧手生產制造環節,產品包括電機驅動式、氣壓驅動式、液壓驅動式、形狀記憶合金驅動式等多種類型的機器人多指靈巧手;下游應用場景聚焦于機器人領域,廣泛服務于航空航天、醫療、智能制造、家政等行業。作為人形機器人的核心部件,靈巧手的自由度、操作精度及價值占比正持續提升。根據MPS分享的數據,若人形機器人采用12個自由度的靈巧手,其方案將包含12個空心杯電機、12個行星減速器、12個6D力矩傳感器及12個編碼器,該套方案在人形機器人整體方案中的成本占比約為17.2%。隨著自由度的提升,這一占比將進一步攀升,設計難度也隨之陡增。
要實現類似人類手部關節的高度靈活性與多功能性,需設計復雜精巧的結構。例如,靈巧手每增加一個關節自由度,就需額外配備驅動單元、傳動機構及支撐結構,而人類手掌與手指的空間極為狹小,在此背景下,空心杯電機已成為主流選擇。同時,多個驅動單元同步動作時,需解決“力矩分配、動作同步性”問題——以抓握球形物體為例,指尖需同步貼合球面,若某一驅動出現響應延遲,易導致物體滑落或局部受力過大。
為破解靈巧手的設計難題,MPS在EZmotion端到端方案中,專門研發了8~16mm直徑的空心杯電機一體化設計方案。其中,MMS1RH系列產品集成了伺服驅動器、位置編碼器、永磁同步電機,SPI時鐘頻率8MHz,不僅能實現更簡潔、安全的高精度控制,還可顯著減少零部件數量及裝配成本,提升整體方案的經濟性與性價比。
MMS1RH方案框圖
MMS1RH系列產品可獨立實現轉矩閉環控制,在配套的C語言EasyFOC庫支持下,可運行于速度控制或位置控制模式。EasyFOC庫通過SPI接口讀取電機的角度、電流、電壓反饋數據,根據客戶設定的控制模式計算對應指令并發送至MMS1RH,從而實現位置或速度閉環控制;其中,對實時性要求較高的FOC電流環控制部分,直接在MMS1RH內部完成。
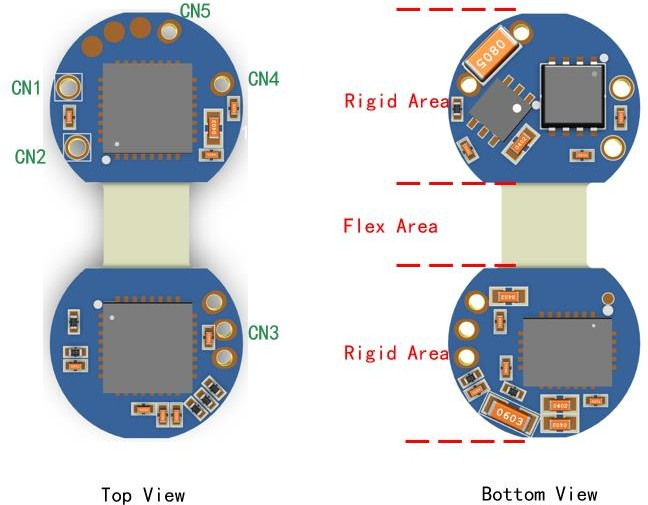
此外,為進一步完善靈巧手驅動解決方案,MPS還推出了電機驅動板MMP1RH。該器件具備FOC控制功能,集成角度傳感器,尺寸超小(直徑9mm、厚度6.5mm),輸入電壓范圍為5V~18V,最大相電流2A,支持最高轉速60000rpm,配備RS485接口,具備UVLO(欠壓鎖定)、OCP(過流保護)功能,可編程開關頻率高達80kHz,角度傳感器分辨率為14bit,電流采樣ADC分辨率為10bit。
電機驅動板MMP1RH
MPS人形機器人整體解決方案
上述靈巧手方案是MPS人形機器人整體方案的重要組成部分。瞿松同時指出,當前靈巧手的應用已遠超人形機器人范疇,擁有廣闊市場空間。為賦能人形機器人及靈巧手研發設計,MPS推出了一系列核心元器件方案。在電機驅動領域,MPS針對性推出了面向三相無刷直流電機的MP(Q)6547A和MP6543兩款產品。其中,MP(Q)6547A具備寬電壓范圍優勢,工作電壓覆蓋4V至32V;驅動能力方面,其內部集成3個半橋驅動器及6個低內阻MOSFET(高邊MOSFET內阻60mΩ,低邊MOSFET內阻50mΩ),連續輸出電流可達3A,峰值電流達6A。封裝采用QFN-18(3mm×4mm),配備可潤濕側翼,在提升散熱性能的同時有效減小PCB占板面積。
MP6543的工作電壓范圍為3V至12V,內部同樣集成3路半橋驅動器,每路MOSFET內阻110mΩ。控制便利性上,該產品支持PWM與ENBL輸入、霍爾信號輸入,內置3.3V/100mA LDO調節器,支持內部充電泵100%占空比工作,具備自動同步整流功能;為便于目標電流檢測,還集成了雙向電流檢測放大器。封裝采用QFN-24,大幅節省PCB空間。
傳感器方案方面,瞿松重點介紹了基于磁阻效應的TMR傳感器MA600A。相較于傳統霍爾傳感器,MA600A具備更高帶寬、更高精度及更低非線性誤差(INL),非常適配機器人應用場景。性能參數上,其工作電壓為3V至3.6V,通信接口支持SPI、ABZ、PWM、UVW及SSI,適配多種通信協議;支持菊花鏈配置,靈活性更高,且通過AEC-Q100認證,安全可靠性優異。體積控制上,MA600A采用QFN-16封裝,直徑僅3mm,可輕松裝配于靈巧手各關鍵位置;同時支持同軸或離軸安裝,能適配不同機器人的機械結構差異。
這些性能領先的元器件,共同構成了MPS EZmotion端到端方案的核心基礎。瞿松表示:“對于MPS而言,我們致力于確保在機器人所有關鍵部件領域,都能提供成熟的解決方案,憑借MPS獨特的技術優勢,助力方案商打造高功率密度、高效率、小體積的人形機器人方案。”
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
靈巧手
+關注
關注
0文章
55瀏覽量
297
發布評論請先 登錄
相關推薦
熱點推薦
人形機器人“靈巧手”,正在接近27個自由度的人手
主要有三大核心組件,驅動、傳動和傳感。驅動主要是空心杯電機等微型電機;傳動上主要有連桿傳動、腱繩傳動和齒輪傳動;此外,觸覺傳感器則讓手具有感知能力。 在靈巧手領域,不少人形機器人企業以及靈巧手

從概念到落地:靈巧手為何是人形機器人產業化的決勝環節?
人形機器人被譽為下一代通用型機器人平臺,其終極目標是能夠無縫接入人類環境,使用人類工具,執行多樣化任務。然而,能否“靈巧”地操作物體,成為區分概念Demo與實用產品的關鍵。靈巧手的性能,直接決定了
靈巧手尺寸縮小60%的模塊化驅動方案
傳統的靈巧手執行方案,就像用一臺中央電腦去控制十幾個機械臂。所有電機的驅動芯片都集中在手掌的主板上——線路復雜、體積臃腫。想增加一個手指的自由度,意味著重新設計整個手掌,拓展性極差。
廣凌智慧教室整體解決方案優勢是什么?
廣凌方案以“硬件+軟件+數據”三位一體的設計理念,構建“教、學、管、評”一體化的智慧教育體系,實現教學效率與管理效能的雙重提升。

先楫芯片賦能HPM生態靈巧手二次開發,工業控制/實驗室原型速落地
搭載先楫半導體高性能MCU芯片的HPM生態靈巧手開發平臺,憑借RISC-V雙核、600MHz高算力與EtherCAT實時通信模塊,實現微秒級多關節并發控制,32通道高精度PWM輸出更保障靈巧手

一體化電機:靈巧手“動力心臟”的技術進階
)約為11%,這一增長主要得益于人形機器人產業的帶動。 ? 在工業自動化、服務機器人、醫療康復等領域,靈巧手作為模擬人類手部動作的核心執行部件,其作業精度、響應速度與動作靈活性直接決定了設備的整體性能。而電機作為靈巧手的“肌肉”
AI、量子通信與JCAP:6G時代的“三位一體“革命
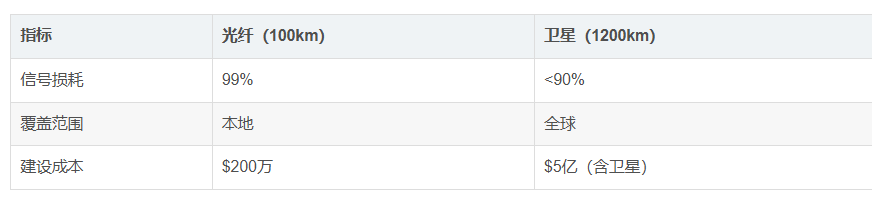
100%的覆蓋可靠性 然而,這些數字背后隱藏著更深層的挑戰: 太空與地面的無縫連接 絕對安全的信息傳輸 厘米級的實時定位 要實現這些突破,僅靠單點技術創新已無法滿足需求。AI、量子通信和聯合通信與定位(JCAP)三大技術的深度融合,正在構建6G的"
年均增長64.6%,機器人靈巧手賽道高燃爆發
64.6%。這一預測充分反映出靈巧手作為人形機器人核心部件的高增長潛力。 ? 近年來,機器人多指靈巧手在結構設計、驅動方式、感知能力等領域取得顯著技術進步。例如,部分企業通過自研減速器等手段,實現單位體積內扭矩密度的最大化,不

AioneMotor_DSC28034_L3F驅控一體板現貨庫存
內核。AioneMotor_DSC28034_L3F電機驅控一體板可驅動BLDC,PMSM,交流感應等三相電機,適用于有感/無感正弦波,有感/無感FOC等
發表于 06-27 09:07
基于CW32L010單片機的掃振一體電動牙刷應用方案
電動牙刷作為現代口腔護理的重要工具,其核心控制系統對產品性能、用戶體驗和成本控制至關重要。而傳統的聲波式電動牙刷雖然刷頭也會振動,但需要用戶手動調整角度才能更好地清潔牙縫和牙齦溝,掃振一體設計則通過
發表于 06-17 09:38
人形機靈巧手求推薦
預算2W左右吧,目前了解過鈦虎/靈心巧手的產品,主要是初次涉足這個行業,比較門外漢,所以來論壇上想跟大家討論一下,求個推薦。
技術上的指標要求:
1.精度超過±0.2mm
2.負載:3KG
發表于 05-08 14:45
曙光全棧國產DeepSeek一體機方案落地高校
在高等教育加速邁向數字化、智能化的背景下,曙光為湖南某高校量身打造的全棧國產DeepSeek一體機方案正式落地。該方案以“算力 + AI + 安全”三位一體架構為核心,全面打通高校信息化建設過程中的關鍵堵點,成為支撐智慧校園深度演進的“超級引擎”。
從方案視角探究:靈巧手所需的電機驅動與傳感技術
篇首語:在靈巧手系統中,MCU 作為整個方案的控制核心,通過多維度技術整合與協同,實現復雜操作功能。例如,在靈巧手實現多自由度精準調控時,MCU 能夠憑借編程精確的控制靈巧手的電機驅動




 工商網監
工商網監
評論