 電子發(fā)燒友App
電子發(fā)燒友App



摘要:介紹了一種采用視頻方式的點坐標(biāo)測量方法。方案設(shè)計巧妙,測量方法穩(wěn)定了可靠、精度高。該方法采用CCD攝像頭拍攝屏幕畫面獲取光點信號,對攝像頭輸出的視頻信號經(jīng)過處理后,得到需要的一系列數(shù)字信號,然后在CPLD中完成數(shù)字邏輯功能,最終得到點的坐標(biāo)。
測量一幅畫面中某點的坐標(biāo),大多采用人工方法。但在有些工作條件下,這種方法給工作人員帶來不便。本文介紹一種自動測量點坐標(biāo)的實現(xiàn)方案。
1 系統(tǒng)總體設(shè)計方案
該方案測量對象是光點,在實驗中用紅色激光筆產(chǎn)生,使用加入紅色濾光片的CCD攝像頭。攝像頭拍下屏幕的畫面后,將其輸出的視頻信號同時送入同步分離電路和前置放大器。經(jīng)過同步分離電路后,分別得到復(fù)合同步信號和場同步信號;經(jīng)過前置放大電路放大、反相后,輸入到鉗位放大器。當(dāng)有光點落在屏幕上時,視頻信號的白電平處會產(chǎn)生尖脈沖。通過高速比較器可以截獲這個尖脈沖信號(即光信號)。該方案預(yù)處理電路結(jié)構(gòu)見圖1。
復(fù)合同步信號與光信號分別作為RS觸發(fā)器的R、S輸入信號,觸發(fā)器輸出端Q輸出的脈沖、振蕩器輸出脈沖以及經(jīng)過延時的復(fù)合同步信號一起輸入三輸入與非門,與非門輸出脈沖中作出水平計數(shù)器的計數(shù)脈沖。當(dāng)光脈沖到來時,水平計數(shù)器停止計數(shù)并將數(shù)值寫入水平鎖存器。復(fù)合同步信號同時也作為水平計數(shù)器的清零信號,在它的下一個下降沿(即下一行)使計數(shù)器清零,進入新一輪水平計數(shù)狀態(tài)。該方案行計數(shù)器結(jié)構(gòu)見圖2。
與圖2類似,場同步信號與光信號分別作為RS觸發(fā)器的R、S輸入信號,輸出信號Q與復(fù)合同步信號以及延遲后的場同步信號經(jīng)過三輸入與門后,輸出的脈沖作為垂直計數(shù)器的計數(shù)脈沖。光脈沖到來時,垂直計數(shù)器停止計數(shù)并將其中的內(nèi)容寫入垂直鎖存器。場同步信號同時也作為垂直計數(shù)器的清零信號,在下一場開始前將其清零,進入新一輪垂直計數(shù)狀態(tài)。該方案場計數(shù)器結(jié)構(gòu)見圖3。
水平鎖存器和垂直鎖存器中的數(shù)值即為光點的坐標(biāo),這樣就測量出圖像中某光點的位置。
2 系統(tǒng)方案實現(xiàn)
2.1 同步分離電路
在電視系統(tǒng)中,為了能正確地重現(xiàn)圖像,要求收端與發(fā)端同步掃描。只要掃描頻率相同、起始相位相同,收端就可以重現(xiàn)發(fā)端圖像并認為是同步的。當(dāng)收端、發(fā)端的頻率、相位不同時,圖像將被破壞,產(chǎn)生畸變,甚至無法重視,因此在圖像信號中加入了同步脈沖。在發(fā)送端,每當(dāng)掃完一行圖像時,加入一個行同步脈沖,每掃完一場圖像時加入一個場同步脈沖。它們與圖像信號一起被發(fā)送出去。在接收端,使行掃描鋸齒波電流只有當(dāng)行同步脈沖到達進才開始逆程期,而場掃描齒波電流也只有在場同步脈沖到達時才開始逆程期。這樣就保證了同步。為了使掃描逆程光柵不顯示(消隱),還需要加入行、場消隱脈沖,這時的圖像信號電平成為消隱電平。攝像頭輸出的是將圖像信號,同步信號,行、場消隱信號這三種信號組合起來形成的黑白全電視信號。我國電視規(guī)定:行頻為15625Hz,行同步脈寬為4.7μs;場頻為50Hz,場同步脈寬為2.5×1/15625=160μs。
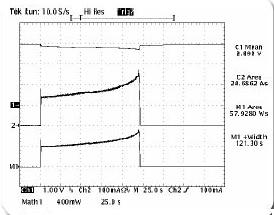
在該方案中,使用專用芯片LM1881將行、場同步脈沖分離出來。LM1881是正極性圖像信號輸入、TTL電平輸出芯片,從而簡化了電路。圖4是LM1881的連接圖以及工作波形示意圖。
正極性圖像信號從2腳輸入,在1腳和3腳分別輸出復(fù)合同步信號和場同步信號。5腳輸出后沿脈沖信號,作為鉗位放大器的鉗位脈沖輸入。7腳輸出奇偶場指示信號。
2.2 鉗位放大器
反極性圖像信號加到解集成電路AN5612的1腳,在其內(nèi)部進行視頻放大,增益由18腳外接對比度電位器R1控制。頻率特性由R3、C7組成的網(wǎng)絡(luò)進行高頻補償。4腳的外接膏藥度電位器R5調(diào)節(jié)黑電平的高低。視頻信號在加入AN5612之前由于通過耦合電容失去了直流成分,因此,視頻信號的消隱電平而改變。為了克服這個缺點,可采用直流耦合放大,但由于一般的直流耦合放大容易產(chǎn)生溫漂,致使黑電平難以穩(wěn)定。常用的辦法是采用鉗位電路,將復(fù)合同步脈沖延遲至行消隱信號后肩,從而把亮度信號的消隱電平鉗位于給定的直流電平上。LM1881的5腳輸出的信號即為所需要的鉗位脈沖。這部分電路見圖5.AN5612的7腳輸出R基色信號,作為比較器LM361的一路輸入。
2.3 比較器
比較器選用LM371,最高速度達到20ns,AN5612的7腳輸出的R基色信號作為LM361的一路輸入信號input1;另一路輸入input2為參考,通過試驗,其值取為3.1V。LM361有兩路互補的TTL電平輸出output1和output2,它們與輸入之間的關(guān)系可以表示如下:

LM361的兩路輸出分別送入CPLD(復(fù)雜的可編程邏輯器件)。
2.4 數(shù)字邏輯電路
該方案的數(shù)字電路部分主要由CPLD構(gòu)成,實現(xiàn)行計數(shù)和場計數(shù)功能。CPLD選用ALTERA公司MAX7000S系列的EPM7128S,支持在系統(tǒng)可編程(In System Programming)。ISP技術(shù)及其器件是20世紀(jì)90年代迅速發(fā)展起來的一種新技術(shù)與新器件。它使設(shè)計者能在產(chǎn)品設(shè)計、制造過程中對產(chǎn)品中的器件、電路板乃至整個電子系統(tǒng)的邏輯和功能隨時進行組態(tài)或重組。采用這種器件開發(fā)的數(shù)字系統(tǒng),升級與改進是極其方便的。
2.4.1 行計數(shù)
行計數(shù)的功能框圖可參見圖2,圖6是實現(xiàn)行計數(shù)的波形示意圖。復(fù)合同步信號延遲10.5μs后至行消隱電平后肩。延遲至消隱電平的后肩是為了避免計數(shù)器在行逆程期間計數(shù),減小誤差。行同步脈寬為4.7μs,而行消隱電平有5.8μμs的后肩,故延遲時間定為10.5μs。在行消隱電平后肩時刻,三輸入與非門開始輸出15MHz的計數(shù)脈沖,行計數(shù)器開始計數(shù)。當(dāng)有光脈沖去到時(即LM361的9腳輸出低電平),RS觸發(fā)器的輸出Q跳變?yōu)椤?”,故三輸入與門輸出“0”,計數(shù)停止計數(shù);同時光脈沖觸發(fā)鎖存器,存儲計數(shù)器中的數(shù)值,至此就獲得了光點的行坐標(biāo)。下一行同步脈沖到來時,會將計數(shù)器清零,開始新一行的點坐標(biāo)測量。
我國電視規(guī)定一行的周期為64μs。除去行消隱脈沖,這樣在15MHz的計數(shù)脈沖下,一行最多可計算的點數(shù)為(64-12)×15=780。也可以根據(jù)對精度要求的不同,選用不同的時鐘。
2.4.2 場計數(shù)
場計數(shù)實現(xiàn)的思想類似于行計數(shù),只不過將復(fù)合同步信號替代為場同步信號;而場計數(shù)脈沖為復(fù)合同步脈沖,而不是15MHz脈沖信號。同樣,為了避免場計數(shù)器在場逆程期間計數(shù),將場同步脈沖寬度延遲到1600μs。光信號到來時,計數(shù)器停止計數(shù),并將數(shù)值入場鎖存器。下一場同步脈沖到來時,將計數(shù)器清零,開始新一場的點坐標(biāo)測量。
由于攝像頭采用隔行掃描方式,兩場構(gòu)成一幀畫面,奇數(shù)場掃奇數(shù)行,偶數(shù)場掃偶數(shù)行,所以此時得到的場坐標(biāo)與實際值之間有較大誤差。為了提高精度,需要確定當(dāng)前掃描的是奇數(shù)場還是偶數(shù)場。假設(shè)場計數(shù)器中的值為n,那么若LM1881的7腳輸出0,表明當(dāng)前掃描的是偶數(shù)場,光點實際應(yīng)在第2n行;若7腳輸出1,表明掃描的是奇數(shù)場,光點實際應(yīng)在第2n-1行。
根據(jù)以上所述的行、場計數(shù)邏輯關(guān)系,可以用硬件描述語言(HDL)設(shè)計數(shù)字電路。在綜合、仿真后,通過下載線將程序?qū)懭隒PLD中,通過JTAG口可以方便地調(diào)試程序。
2.4.3 誤差校正
由于光在空氣中是發(fā)散的,所以實際上攝像頭拍攝到的不是光點,而是光斑。在本方案中,電路測得的坐標(biāo)實際為光斑左上解某點的坐標(biāo),而不是光斑中心點的坐標(biāo),故還需要對此值進行校正,才能得到光斑中心點較準(zhǔn)確的坐標(biāo)位置。校正值應(yīng)根據(jù)實際情況下光斑的大小來確定。
表1是在一個12.7cm×7.6cm的區(qū)域內(nèi),通過實驗所得的三組數(shù)據(jù)。起始點為這塊區(qū)域的左上角一點。實驗數(shù)據(jù)表明了方案設(shè)計的正確性。該方案已應(yīng)用于實際項目中,取得了良好的效果。
表1 實驗數(shù)據(jù)表
| 單位:cm | 自動測量 | 手工測量 | 誤 差 | |||
| 行坐標(biāo) | 場坐標(biāo) | 行坐標(biāo) | 場坐標(biāo) | 行 | 場 | |
| 第一組 | 7.00175 | 6.00957 | 7.2 | 5.9 | -0.19825 | 0.10957 |
| 第二組 | 3.02892 | 4.48713 | 3.2 | 4.4 | -0.17108 | 0.08713 |
| 第三組 | 6.62726 | 3.71982 | 6.7 | 3.9 | -0.07274 | -0.18018 |
- 測量方法(13242)
- 采用視頻(6137)


鋰離子電池自放電的測量方法
 5737
5737鋰離子電池自放電的測量方法
5178晶圓表面形貌及臺階高度測量方法
1899
國產(chǎn)三坐標(biāo)測量機|中圖儀器全自主研發(fā),實現(xiàn)高精度三維尺寸測量
3499
三坐標(biāo)測量儀與影像測量儀相比有什么區(qū)別
2155
測量方法的分類
采用光電技術(shù)的脈搏測量方法
采用霍爾元件的轉(zhuǎn)盤扭矩測量方法
PWM占空比的測量方法
三坐標(biāo)測量儀測量同軸度誤差的正確方法
儀器、儀表的測量方法分類
儀器設(shè)計架構(gòu)hi測量方法
傳感器測量方法比較
壓力傳感器的八種測量方法
基于乘法器的模擬電路參數(shù)測量方法
射頻功率的測量方法
探討增益壓縮的意義及矢網(wǎng)實操測量方法
晶體電路測量方法
有哪些用于可靠的電容傳感器接口的模擬前端IC測量方法?
機械零件高效測量方法
步進電機的特性測量方法有哪些
深究諧波測量方法
電子電路的測量方法
電池內(nèi)阻及測量方法
數(shù)字視頻數(shù)字音頻電纜技術(shù)要求和測量方法GY T 224-20
 35
35模擬測量方法和數(shù)字測量方法
0轉(zhuǎn)速測量方法與原理
119基于雙目視覺的雙頻光柵三維測量方法
20軟件化雷達視頻顯示的實時坐標(biāo)變換方法
43
光信號同步的間接測量方法和結(jié)構(gòu)
1207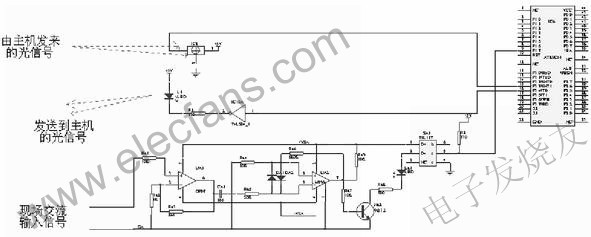
數(shù)控機床工件坐標(biāo)找正方法
106串聯(lián)電池電壓及溫度測量方法研究
4714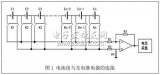
相位測量方法介紹
113對群延遲測量方法的研究
21激光測距傳感器的測量方法有哪些?
3086電力系統(tǒng)頻率測量方法及應(yīng)用
1薄膜電容的測量方法
10142采用不同的測量方法和連接方式對電阻進行有效測量
2935
PI電源效率測量方法
17電容電流測試儀的測量方法
5673基于魚眼鏡頭的樹高測量方法綜述
10GIS回路電阻測量方法
2779
鋰電池自放電測量方法
6114關(guān)于鋰離子電池靜置測量方法
4256步進電機的特性測量方法(靜態(tài)特性)
1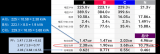
{kind=link}
{kind=link}
激光跟蹤儀坐標(biāo)測量方法?
3750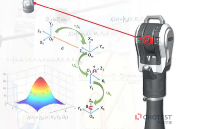
三坐標(biāo)測量方法有哪些?有哪些三坐標(biāo)測量儀?
5075
三坐標(biāo)測量儀的使用方法
7105
三坐標(biāo)測量的基本步驟
12196
三坐標(biāo)測量機測量優(yōu)點
2720
晶圓表面形貌及臺階高度測量方法
1三坐標(biāo)測量機&激光干涉儀:平行度測量的方法及檢測工具
0電阻的測量方法有哪些
6450橋式三坐標(biāo)測量機和影像測量三坐標(biāo)介紹
1670
三次元檢測設(shè)備三坐標(biāo)測量儀CMM
2904
數(shù)字示波器的測量方法有哪三種
3788可控硅整流器的測量方法
3304- 設(shè)計技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設(shè)備
- 機器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計資源
- 設(shè)計技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 電子發(fā)燒友
- 關(guān)于我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 張迎輝:mikezhang@elecfans.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論