 電子發(fā)燒友App
電子發(fā)燒友App



摘要:智能交通系統(tǒng)是21世紀(jì)城市交通的發(fā)展方向,移動(dòng)機(jī)器人作為智能車輛控制系統(tǒng)實(shí)驗(yàn)平臺(tái)的一個(gè)主要部分,對(duì)智能交通系統(tǒng)的關(guān)鍵技術(shù)的研究具有十分重要的意義。介紹了面向智能交通系統(tǒng)的SJTNC-1移動(dòng)機(jī)器人的組成和結(jié)構(gòu),并詳細(xì)敘述了基于數(shù)字信號(hào)處理器TMS320LF2407A的控制系統(tǒng)的設(shè)計(jì)和實(shí)現(xiàn)。
智能交通系統(tǒng)(ITS)的概念是美國(guó)智能交通學(xué)會(huì)于1990年提出的,它將先進(jìn)的信息技術(shù)、通信技術(shù)、自動(dòng)控制技術(shù)、電子技術(shù)及計(jì)算機(jī)處理技術(shù)綜合運(yùn)用于整個(gè)運(yùn)輸管理系統(tǒng)中,通過(guò)對(duì)交通信息的采集、傳輸和處理,對(duì)交通運(yùn)輸進(jìn)行協(xié)調(diào)和管理,建立起實(shí)時(shí)、準(zhǔn)確、高效的綜合交通運(yùn)輸管理體系,從而提高了交通效率和安全了,實(shí)現(xiàn)性交通運(yùn)輸服務(wù)和管理的智能化。
智能車輛的導(dǎo)航與定位、自動(dòng)駕駛與控制和車輛的預(yù)警防碰等智能交通系統(tǒng)關(guān)鍵技術(shù)的研究,近年來(lái)受到國(guó)內(nèi)外越來(lái)越廣泛的關(guān)注,也取得了豐碩的成果。但真正的實(shí)驗(yàn)研究還是很少,基本上只進(jìn)行了仿真試驗(yàn)。鑒于理論上的模擬和實(shí)際應(yīng)用情況可能相差甚遠(yuǎn),選擇了具有智能性、易擴(kuò)展性和移動(dòng)性等優(yōu)點(diǎn)的車型移動(dòng)機(jī)器人作為ITS關(guān)鍵技術(shù)的研究平臺(tái)中的主要部分——車輛模擬器。
本文所闡述的移動(dòng)機(jī)器人SJTNC-1,就是面向ITS提出的。考慮到關(guān)鍵技術(shù)研究中需進(jìn)行大量的計(jì)算,如模糊控制、卡爾曼濾波和路徑導(dǎo)引等,并且系統(tǒng)對(duì)數(shù)據(jù)的實(shí)時(shí)性要求很高,所以采用數(shù)字信號(hào)處理器(DSP)作為移動(dòng)機(jī)器人主控CPU。
1 TMS320LF2407A簡(jiǎn)介
TMS320LF2407A(以下簡(jiǎn)稱F2407)是TI公司在TMS320系列DSP的基礎(chǔ)上,專為數(shù)字電機(jī)控制而設(shè)計(jì)的。除了具有一般DSP的改進(jìn)的哈佛結(jié)構(gòu)、多總線結(jié)構(gòu)和流水線結(jié)構(gòu)等優(yōu)點(diǎn)外,它還采用高性能靜態(tài)CMOS技術(shù),電壓從5V降為3.3V,減少了功耗。并且指令執(zhí)行速度提高到40MIPS,幾乎所有指令都可以在25ns的單周期內(nèi)完成。如此高的運(yùn)算速度使其可以通過(guò)采用高級(jí)控制算法如模糊控制、卡爾曼濾波以及狀態(tài)控制等來(lái)提高系統(tǒng)的性能。而且,它具有電機(jī)控制應(yīng)用所必需的外設(shè),如:32K片內(nèi)FLASH、2K單訪問(wèn)RAM、串行外設(shè)接口(SPl)、串行通信接口(SCl)、兩個(gè)事件管理模塊、16通道雙10位A/D轉(zhuǎn)換器和CAN控制器模塊。
2 移動(dòng)機(jī)器人的運(yùn)動(dòng)機(jī)構(gòu)
考慮到該移動(dòng)機(jī)器人是面向ITS的,所以采用的是車型結(jié)構(gòu)(四輪結(jié)構(gòu))。前兩輪通過(guò)減速比為8:1的齒輪減速機(jī)構(gòu)與轉(zhuǎn)向電機(jī)進(jìn)行連接,實(shí)現(xiàn)移動(dòng)機(jī)器人的轉(zhuǎn)向功能;后兩輪通過(guò)減速比為6:1的齒輪減速機(jī)構(gòu)與驅(qū)動(dòng)電機(jī)進(jìn)行連接,實(shí)現(xiàn)移動(dòng)機(jī)器人的驅(qū)動(dòng)。電機(jī)的選型可根據(jù)實(shí)際情況選擇小型步進(jìn)電機(jī)或小型直流電機(jī)。這里選用的是瑞土Minimotor公司生產(chǎn)的直流電機(jī),這種電機(jī)具有體積小、轉(zhuǎn)矩大等特點(diǎn)。
3 移動(dòng)機(jī)器人控制系統(tǒng)
控制系統(tǒng)以控制器F2407為核心,由無(wú)線通信、電機(jī)驅(qū)動(dòng)、速度傳感器、數(shù)字羅盤、差分GPS(DGPS)接收機(jī)和4轉(zhuǎn)1串口通信模塊等組成,如圖1所示。無(wú)線通信模塊根據(jù)自行約定的通信協(xié)議接收上位機(jī)的規(guī)劃好的路徑信息,整個(gè)控制系統(tǒng)通過(guò)控制驅(qū)動(dòng)電機(jī)和轉(zhuǎn)向電機(jī)使移動(dòng)機(jī)器人跟蹤該路徑行駛。電機(jī)采用PWM調(diào)速方式,其中驅(qū)動(dòng)電機(jī)采用雙閉環(huán)(速度和電流)PID控制策略,而轉(zhuǎn)向電機(jī)則通過(guò)把數(shù)字羅盤的航向信息作為轉(zhuǎn)向的反饋量進(jìn)行PID控制。整個(gè)控制系統(tǒng)把DGPS接收機(jī)的位置信息作為系統(tǒng)的位置反饋信息,用以完成整個(gè)系統(tǒng)的位置閉環(huán)控制。
圖3
3.1 無(wú)線通信模塊
MC35是德國(guó)西門子公司生產(chǎn)的可二次開發(fā)的支持GPRS的雙頻GSM模塊,可以通過(guò)標(biāo)準(zhǔn)串口與PC機(jī)相連。本系統(tǒng)用MC35作為移動(dòng)機(jī)器人與上位機(jī)的通信模塊。它具有GPRS技術(shù)帶來(lái)的一切優(yōu)點(diǎn),如一直在線和提供高速價(jià)廉的數(shù)據(jù)傳送服務(wù)等。該產(chǎn)品的特性如下:
·支持雙頻:EGSM900/GSM1800
·支持GPRS Class8協(xié)議
·支持?jǐn)?shù)據(jù)、語(yǔ)音、短消息和傳真服務(wù)
·采用電路交換方式,最大傳送速率為14.4kbps
·支持的電壓范圍:8V~30V
·采用標(biāo)準(zhǔn)工業(yè)接口
·體積:65mmx74mmx33mm
·重量:130g
3.2 驅(qū)動(dòng)模塊
驅(qū)動(dòng)電機(jī)和轉(zhuǎn)向電機(jī)的驅(qū)動(dòng)原理相同,都采用脈寬調(diào)制(PWM)方式進(jìn)行調(diào)速,PWM信號(hào)由F2407產(chǎn)生。驅(qū)動(dòng)電路采用H全橋方式,由4個(gè)達(dá)林頓管(2個(gè)TIPl32和2個(gè)TIPl37)、4個(gè)IN4001二極管及與非門組成。電路原理圖如圖2所示。 當(dāng)PWM2、PWM4為低電平而PWMl、PWM3為高電平時(shí),T1、T4飽和導(dǎo)通,T2、T3截止,電流從T1→電機(jī)→T4,電機(jī)正轉(zhuǎn);反之,當(dāng)PWMl、PWM3為低電平而PWM2、PWM4為高電平時(shí),T2、T3飽和導(dǎo)通,T1、T4截止,電流從T2→電機(jī)→T3,電機(jī)反轉(zhuǎn)。
圖4
為防止T1、T3或T2、T4同時(shí)導(dǎo)通,形成短路而擊穿器件,要用一對(duì)無(wú)重疊的PWM輸出去正確地開啟和關(guān)斷這兩對(duì)管子。在一個(gè)管子關(guān)斷和另一個(gè)管子開啟之間加入死區(qū)時(shí)間,這樣就使得一個(gè)管子開啟前,另一個(gè)管子已完全關(guān)斷。F2407具有死區(qū)控制單元是其一大特色,從而可用軟件確保功率電路上下橋臂開關(guān)元件的開通區(qū)間沒(méi)有重疊,簡(jiǎn)化了硬件電路設(shè)計(jì),提高了可靠性。
3.3 4轉(zhuǎn)1串口通信模塊
由于DGPS接收機(jī)、磁羅盤、里程計(jì)和MC35通信模塊都采用RS-232異步串行通信,而F2407只有一個(gè)串行口,所以必須將4個(gè)串口數(shù)據(jù)通過(guò)轉(zhuǎn)換處理來(lái)完成與F2407的串口通信。為此研制了基于分時(shí)復(fù)用方法的4轉(zhuǎn)1串口通信模塊。當(dāng)F2407需要某個(gè)傳感器(或無(wú)線通信模塊)的數(shù)據(jù)時(shí),就通過(guò)電路選通該傳感器占用F2407串口進(jìn)行通信;當(dāng)需要另外傳感器或無(wú)線通信模塊數(shù)據(jù)時(shí),則關(guān)斷上次傳感器的選通,同時(shí)選通該次傳感器或無(wú)線通信模塊。4轉(zhuǎn)1串口通信模塊由3-8譯碼器74LSl38、三態(tài)輸出的四總線緩沖門74LSl25和電平轉(zhuǎn)換器MAX232等組成,其電路原理圖如圖3所示。
3.4 定位傳感器
3.4.1 DGPS接收機(jī)
CPS(全球定位系統(tǒng))是基于衛(wèi)星的無(wú)線電導(dǎo)航系統(tǒng),它提供一種廉價(jià)實(shí)用的可在全球范圍內(nèi)確定位置、速度和時(shí)間的工具。CPS由24顆衛(wèi)星(21顆工作星、3顆備份星)組成星座,星座分布在與地球赤道面傾角為55°的6個(gè)軌道面上,其運(yùn)行周期為11小時(shí)58分,軌道半徑為20200km,各軌道面夾角,為60°。每顆衛(wèi)星向地球發(fā)射L頻段的特高連續(xù)波,調(diào)制兩種偽隨機(jī)碼(軍用高精度保密P碼和民用C/A碼)。這樣的分布特點(diǎn)保證了用戶在地球上任何地點(diǎn)、任何時(shí)間至少可以連續(xù)地收到4顆以上衛(wèi)星的導(dǎo)航信號(hào),從而聯(lián)立解算出接收機(jī)的三維坐標(biāo)以及接收機(jī)和GPS間的時(shí)間偏移。三維坐標(biāo)采用ECEF笛卡兒坐標(biāo)系或大地坐標(biāo)系如WGS84。
雖然美國(guó)政府于2001年5月取消了民用C/A碼的可選擇性保護(hù),但民用導(dǎo)航型GPS接收機(jī)的單點(diǎn)實(shí)時(shí)定位精度只能達(dá)到25m左右,不能滿足系統(tǒng)的定位導(dǎo)航要求。而采用實(shí)時(shí)差分GPS(DGPS),其定位精度可以達(dá)到2~5m,該精度已能滿足系統(tǒng)定位和導(dǎo)航的要求。
為此研發(fā)了單基站DGPS(SRDGPS)系統(tǒng),其結(jié)構(gòu)框圖如圖4所示。基準(zhǔn)站由ALLSTAR BASE GPS接收機(jī)、天線和MDS無(wú)線電發(fā)射臺(tái)、天線組成,流動(dòng)站由SUPERSTAR GPS接收機(jī)、天線和MDX無(wú)線電接收臺(tái)、天線組成。其中基準(zhǔn)站安裝在上海交大徐家匯校區(qū)教學(xué)一樓樓頂,該基準(zhǔn)站能覆蓋方圓30公里的范圍,流動(dòng)站安裝在車載單元上。
3.4.2 數(shù)字羅盤和車速傳感器
采用HoneyWell公司的HMR 3300數(shù)字羅盤作為移動(dòng)機(jī)器人的方向檢測(cè)傳感器。其主要技術(shù)指標(biāo)為:(1)1度航向精度,0.1度分辨率;(2)0.5度重復(fù)性;(3)±60度傾斜俯仰范圍;(4)15Hz響應(yīng)時(shí)間;(5)-40+85度工作溫度;(6)6~15V直流電壓。
同時(shí)采用用于大眾汽車公司桑塔納2000型轎車的霍爾車速傳感器作為移動(dòng)機(jī)器人的車速傳感器。其工作原理是以霍爾傳感器為變換元件,將機(jī)械旋轉(zhuǎn)量轉(zhuǎn)化為電脈沖信號(hào)輸出。主要技術(shù)指標(biāo)為:(1)輸出波形為矩形脈沖,占空比為50%;(2)每旋轉(zhuǎn)一周產(chǎn)生6個(gè)脈沖;(3)額定電壓為12V。
4 電源模塊
電源模塊需分別給各傳感器、DSP芯片、其它芯片和電機(jī)供電。其中,磁羅盤、碼盤和DGPS接收機(jī)使用12V直流電壓,DSP芯片使用3.3V直流電壓,其它芯片使用5V直流電壓,還有電機(jī)電源使用12V直流電壓。所以,采用1節(jié)12V的直流蓄電池(4AH),直流5V通過(guò)ST半導(dǎo)體公司的L7805和擴(kuò)流用的功率管實(shí)現(xiàn),DSP芯片用3.3V電源采用ON半導(dǎo)體公司的1SMB5913BT3實(shí)現(xiàn)。F2407正常工作時(shí),所有電源管腳都為3.3V;寫入FLASH存儲(chǔ)器時(shí),VCCP引腳為5V供電;復(fù)位時(shí),復(fù)位電路會(huì)產(chǎn)生一個(gè)10μs寬度的持續(xù)低電平使芯片復(fù)位。
5 控制器程序結(jié)構(gòu)
DSP程序由五大功能模塊組成,分別為系統(tǒng)初始化模塊、串口通信模塊、路徑引導(dǎo)模塊、驅(qū)動(dòng)電機(jī)控制模塊和轉(zhuǎn)向電機(jī)控制模塊。TI公司提供了用于C語(yǔ)言開發(fā)的CC和CCS平臺(tái)。該平臺(tái)包括了ANSIC優(yōu)化編譯器,從而可以在源程序級(jí)進(jìn)行開發(fā)調(diào)試。這種方式大大提高了軟件的開發(fā)速度和可讀性,方便了軟件的修改和移植。但在某些情況下,代碼的效率還是無(wú)法與手工編寫的匯編代碼的效率相比。此外,用C語(yǔ)言實(shí)現(xiàn)芯片的某些硬件控制也不如匯編程序方便,有些甚至無(wú)法用語(yǔ)言實(shí)現(xiàn)。為了充分利用芯片的資源,更好地發(fā)揮C語(yǔ)言和匯編語(yǔ)言進(jìn)行軟件開發(fā)的各自優(yōu)點(diǎn),采用混合編程方法將兩者有機(jī)結(jié)合起來(lái),兼顧兩者的優(yōu)點(diǎn),避免其弊端。系統(tǒng)的框架如圖5所示。下面對(duì)關(guān)鍵的幾大模塊進(jìn)行簡(jiǎn)要的闡述。
5.1 串口通信模塊
該模塊程序采用串口中斷方式實(shí)現(xiàn),主程序主要由系統(tǒng)初始化、串口初始化、串口中斷設(shè)置和等待中斷組成。而中斷子程序分為發(fā)送子程序和接收子程序。本文給出發(fā)送子程序流程圖。主程序及發(fā)送子程序流程圖如圖6所示。
5.2 路徑引導(dǎo)模塊
該模塊在移動(dòng)機(jī)器人行駛中為其提供實(shí)時(shí)的速度和轉(zhuǎn)向指令,從而引導(dǎo)它沿著上位機(jī)給定的路徑行駛。主要包括行駛指令的產(chǎn)生和規(guī)劃路徑的跟蹤兩個(gè)環(huán)節(jié)。
根據(jù)預(yù)瞄跟隨理論及駕駛員的開車行為特性,智能行駛和駕駛員操縱行為是內(nèi)在一致的。通過(guò)研究有駕駛員操縱行為,發(fā)現(xiàn)主要根據(jù)兩個(gè)因素決定車輛的前進(jìn)速度,這兩個(gè)因素分別是道路的彎曲程度和機(jī)器人相對(duì)參考路徑上的方向偏差。
移動(dòng)機(jī)器人的前進(jìn)速度的控制不需要連續(xù)變化,可設(shè)置為三檔,分別對(duì)應(yīng)高、中和低三個(gè)速度。由此確定的前進(jìn)速度跟蹤規(guī)則為:
·當(dāng)方向偏差小于10度時(shí),路徑基本為直線,前進(jìn)速度設(shè)為高速;
·當(dāng)方向偏差小于90度時(shí),路徑彎曲較嚴(yán)重,前進(jìn)速度設(shè)為低速;
·其它情況時(shí),前進(jìn)速度為中速。
5.3 驅(qū)動(dòng)電機(jī)和轉(zhuǎn)向電機(jī)控制模塊
驅(qū)動(dòng)電機(jī)模塊采取PID控制策略,將車速傳感器檢測(cè)的信號(hào)作為電機(jī)的反饋信號(hào),進(jìn)行PID控制,取得了很好的控制效果。轉(zhuǎn)向控制模塊的控制策略與驅(qū)動(dòng)電機(jī)的類似,只是其反饋的信號(hào)為數(shù)字羅盤的方向信號(hào)。PID控制算式為:
△u(k)=Kp[e(k)-e(k-1)]+Ki·e(k)+
Kd[e(k)-2e(k-1)+e(k-2)]
u(k)=(k-1)+△u(k)
式中,u(k)為控制的輸出;e(k)為k時(shí)刻的偏差;Kp、Ki、Kd分別為PID控制算法的比例系數(shù)、積分常數(shù)和微分常數(shù)。


移動(dòng)機(jī)器人常用傳感器及相關(guān)避障技術(shù)介紹
 1863
1863移動(dòng)機(jī)器人避障常用傳感器及神經(jīng)網(wǎng)絡(luò)算法
13926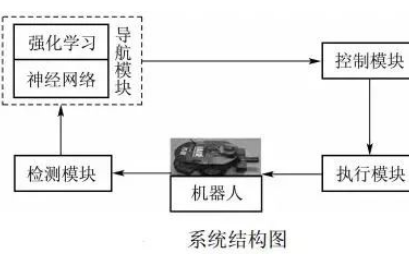
移動(dòng)機(jī)器人的發(fā)展現(xiàn)狀及趨勢(shì) HMS產(chǎn)品在移動(dòng)機(jī)器人的應(yīng)用
2524
拓荒移動(dòng)機(jī)器人行業(yè),那些國(guó)外移動(dòng)機(jī)器人先行者
4295機(jī)器人、協(xié)作機(jī)器人和移動(dòng)機(jī)器人,你分的清楚嗎
移動(dòng)機(jī)器人底盤主要包含哪些設(shè)備
移動(dòng)機(jī)器人的三種主要運(yùn)動(dòng)系統(tǒng)
移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)及控制算法研究
Labview My RIO 移動(dòng)機(jī)器人
labview控制移動(dòng)機(jī)器人
【科普】干貨!帶你從0了解移動(dòng)機(jī)器人(三) ——自主導(dǎo)航系統(tǒng)及上位機(jī)軟件設(shè)計(jì)與實(shí)現(xiàn)
【科普】干貨!帶你從0了解移動(dòng)機(jī)器人(四) ——移動(dòng)機(jī)器人導(dǎo)航技術(shù)
為移動(dòng)機(jī)器人上的Kinect v2配置移動(dòng)電源
什么是移動(dòng)機(jī)器人軟硬件系統(tǒng)問(wèn)題
利用myrio控制移動(dòng)機(jī)器人的問(wèn)題
基于FPGA怎么實(shí)現(xiàn)三輪全方位移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)?
基于LPC2119的自主式移動(dòng)機(jī)器人設(shè)計(jì)方案
基于MSP430F149單片機(jī)設(shè)計(jì)的室外移動(dòng)機(jī)器人組合導(dǎo)航定位系統(tǒng)
基于Matlab和VR技術(shù)的移動(dòng)機(jī)器人建模及仿真
基于Matlab和VR技術(shù)的移動(dòng)機(jī)器人建模及仿真
基于SLAM的移動(dòng)機(jī)器人設(shè)計(jì)
基于超聲波傳感器的自主移動(dòng)機(jī)器人探測(cè)系統(tǒng)
基于超聲波傳感器的自主移動(dòng)機(jī)器人的探測(cè)系統(tǒng)
如何實(shí)現(xiàn)移動(dòng)機(jī)器人的設(shè)計(jì)?
如何利用掃地機(jī)輪子制作ROS移動(dòng)機(jī)器人地盤
如何導(dǎo)出移動(dòng)機(jī)器人URDF模型
家庭移動(dòng)機(jī)器人避障常用傳感器及相關(guān)技術(shù)
履帶式移動(dòng)機(jī)器人的設(shè)計(jì)
差速移動(dòng)機(jī)器人軌跡跟蹤控制方法
怎么實(shí)現(xiàn)三路超聲波避障移動(dòng)機(jī)器人平臺(tái)的設(shè)計(jì)?
想設(shè)計(jì)炫酷的移動(dòng)機(jī)器人?視覺(jué)定位設(shè)計(jì)方案分享給你!
手柄連接機(jī)器人
旋轉(zhuǎn)編碼器怎么節(jié)約移動(dòng)機(jī)器人功耗?
有哪些廠家的輪式移動(dòng)機(jī)器人可以實(shí)現(xiàn)力矩控制?
詳解移動(dòng)機(jī)器人軟硬件系統(tǒng)問(wèn)題
請(qǐng)問(wèn)怎么設(shè)計(jì)一種室外移動(dòng)機(jī)器人組合導(dǎo)航定位系統(tǒng)?
資料:移動(dòng)機(jī)器人能否自動(dòng)充電?
輪式移動(dòng)機(jī)器人電機(jī)驅(qū)動(dòng)系統(tǒng)的研究與開發(fā)
基于達(dá)芬奇的移動(dòng)機(jī)器人開發(fā)平臺(tái)設(shè)計(jì)
 66
66基于無(wú)線局域網(wǎng)的移動(dòng)機(jī)器人遠(yuǎn)程控制系統(tǒng)
40AMR控制器:科聰AMR移動(dòng)機(jī)器人控制器
AGV控制器:科聰叉式移動(dòng)機(jī)器人控制器
PLC的漿液下移動(dòng)機(jī)器人控制系統(tǒng)
934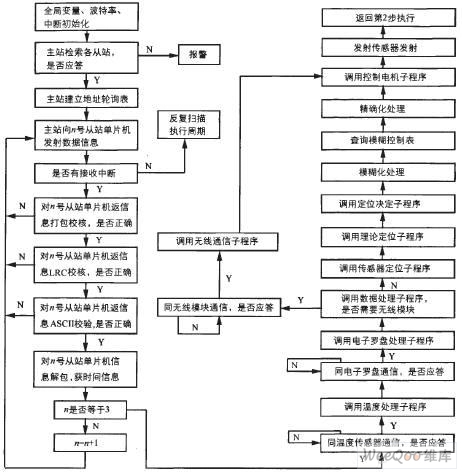
移動(dòng)機(jī)器人激光全局定位系統(tǒng)的算法研究
14移動(dòng)機(jī)器人的視覺(jué)處理方法
0移動(dòng)機(jī)器人的分類與移動(dòng)機(jī)器人技術(shù)研究現(xiàn)狀和未來(lái)發(fā)展的分析
13基于ARM的移動(dòng)機(jī)器人組合導(dǎo)航系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
5移動(dòng)機(jī)器人技術(shù)及其分類和空間定位技術(shù)詳解
16全方位移動(dòng)機(jī)器人運(yùn)動(dòng)模型及其系統(tǒng)設(shè)計(jì)方案
9開源移動(dòng)機(jī)器人系統(tǒng)設(shè)計(jì)
0如何區(qū)分機(jī)器人、協(xié)作機(jī)器人和移動(dòng)機(jī)器人?
7703基于DSP和CAN總線實(shí)現(xiàn)移動(dòng)機(jī)器人超聲測(cè)距系統(tǒng)的軟硬件設(shè)計(jì)
6557
探訪智能工廠移動(dòng)機(jī)器人“專家”仙知機(jī)器人
4167移動(dòng)機(jī)器人控制系統(tǒng)設(shè)計(jì)與仿真
4221
移動(dòng)機(jī)器人是如何定位的
4899解讀關(guān)于移動(dòng)機(jī)器人的運(yùn)動(dòng)模型
2799使用Matlab和VR技術(shù)實(shí)現(xiàn)移動(dòng)機(jī)器人的建模及仿真的方案說(shuō)明
10如何利用SRC核心控制器來(lái)打造自己的專屬移動(dòng)機(jī)器人
3070激光導(dǎo)航移動(dòng)機(jī)器人是如何工作的
2681移動(dòng)機(jī)器人路徑規(guī)劃的實(shí)現(xiàn)
2933如何才能實(shí)現(xiàn)移動(dòng)機(jī)器人的導(dǎo)航定位和地圖構(gòu)建技術(shù)
23移動(dòng)機(jī)器人的關(guān)鍵技術(shù)有哪些
18移動(dòng)機(jī)器人行業(yè)融資大熱 5G為移動(dòng)機(jī)器人帶來(lái)機(jī)遇
21785G技術(shù)的加持,我國(guó)移動(dòng)機(jī)器人AGV將迎來(lái)突破
3331移動(dòng)機(jī)器人產(chǎn)業(yè)鏈的“新故事”
3683移動(dòng)機(jī)器人11月新品
2963工業(yè)移動(dòng)機(jī)器人的基本介紹
759移動(dòng)機(jī)器人實(shí)現(xiàn)路徑規(guī)劃
1379SRC核心控制器,輕松打造你的專屬移動(dòng)機(jī)器人
1865如何使用Matlab和VR技術(shù)實(shí)現(xiàn)移動(dòng)機(jī)器人的建模和仿真
13基于DSP和USB總線的開放式移動(dòng)機(jī)器人控制系統(tǒng)
21移動(dòng)機(jī)器人底盤的功能及應(yīng)用
4163基于樹莓派的移動(dòng)機(jī)器人實(shí)現(xiàn)
16室外移動(dòng)機(jī)器人分類
2404
{kind=link}
{kind=link}
【科普】干貨!帶你從0了解移動(dòng)機(jī)器人(二)—— 移動(dòng)機(jī)器人硬件組成
3341
【科普】干貨!帶你從0了解移動(dòng)機(jī)器人(四) ——移動(dòng)機(jī)器人導(dǎo)航技術(shù)
3118
復(fù)合移動(dòng)機(jī)器人(AGV/AMR),如何快速構(gòu)建?
2236
室外移動(dòng)機(jī)器人分類
2728
【科普】干貨!帶你從0了解移動(dòng)機(jī)器人(一)—— 什么是移動(dòng)機(jī)器人
4393
「車型分析」移動(dòng)機(jī)器人控制系統(tǒng)典型應(yīng)用車型 ——叉式移動(dòng)機(jī)器人(AGV/AMR)
2406
【科普】干貨!帶你從0了解移動(dòng)機(jī)器人(四) ——移動(dòng)機(jī)器人導(dǎo)航技術(shù)
2492移動(dòng)機(jī)器人的構(gòu)建
3自主移動(dòng)機(jī)器人(AMR)功能和特點(diǎn)
3172
海康機(jī)器人第100000臺(tái)移動(dòng)機(jī)器人下線
2031智能移動(dòng)機(jī)器人
1127
移動(dòng)機(jī)器人的技術(shù)突破和未來(lái)展望
1003
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 電子發(fā)燒友
- 關(guān)于我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 張迎輝:mikezhang@elecfans.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論