") 【科普】干貨!帶你從0了解移動(dòng)機(jī)器人(二)—— 移動(dòng)機(jī)器人硬件組成
【科普】干貨!帶你從0了解移動(dòng)機(jī)器人(二)—— 移動(dòng)機(jī)器人硬件組成

移動(dòng)機(jī)器人是一個(gè)多功能于一體的綜合系統(tǒng),內(nèi)容涵蓋了傳感器技術(shù)、自動(dòng)化技術(shù)、信息處理、電子工程等,它集環(huán)境感知、動(dòng)態(tài)決策與規(guī)劃于一體,是目前科學(xué)技術(shù)發(fā)展最活躍的領(lǐng)域之一。移動(dòng)機(jī)器人的各種組件之間需要協(xié)同工作才能實(shí)現(xiàn)機(jī)器人的自主移動(dòng)。下面將詳細(xì)介紹移動(dòng)機(jī)器人的硬件組成,從傳感器、運(yùn)動(dòng)控制到交互模塊都在其范疇內(nèi)。
1、控制系統(tǒng):
控制系統(tǒng)是移動(dòng)機(jī)器人最重要的部分,類似于人的大腦,用來接收傳感器模塊采集的數(shù)據(jù),并進(jìn)行信息處理分析,從而下發(fā)各種運(yùn)動(dòng)指令。控制系統(tǒng)需要基于處理器實(shí)現(xiàn),使用ARM等可靠MCU處理器,其性能不同,可以根據(jù)機(jī)器人的應(yīng)用選擇。在處理器之上,控制系統(tǒng)需要完成機(jī)器人的算法處理、關(guān)節(jié)控制、人機(jī)交互等豐富功能。

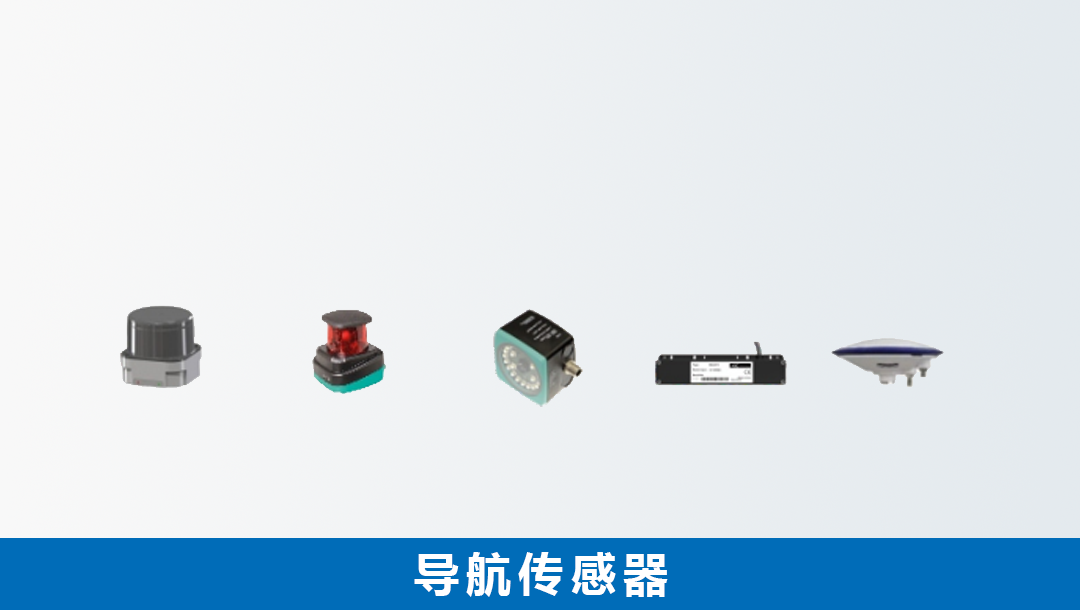
2、導(dǎo)航傳感:
導(dǎo)航傳感主要用于獲取和感知周圍環(huán)境信息,以提供給控制系統(tǒng)做出響應(yīng)決策。常見的傳感器包括:激光雷達(dá)、紅外線傳感器、超聲波距離傳感器、攝像頭、陀螺儀等。通過這些傳感器的協(xié)作,移動(dòng)機(jī)器人才能夠精確地定位目標(biāo)位置,給出行動(dòng)路線和地圖,并識(shí)別障礙物等避免撞擊。它能夠讓機(jī)器人在陌生的環(huán)境中自主移動(dòng),并快速地響應(yīng)任何改變。
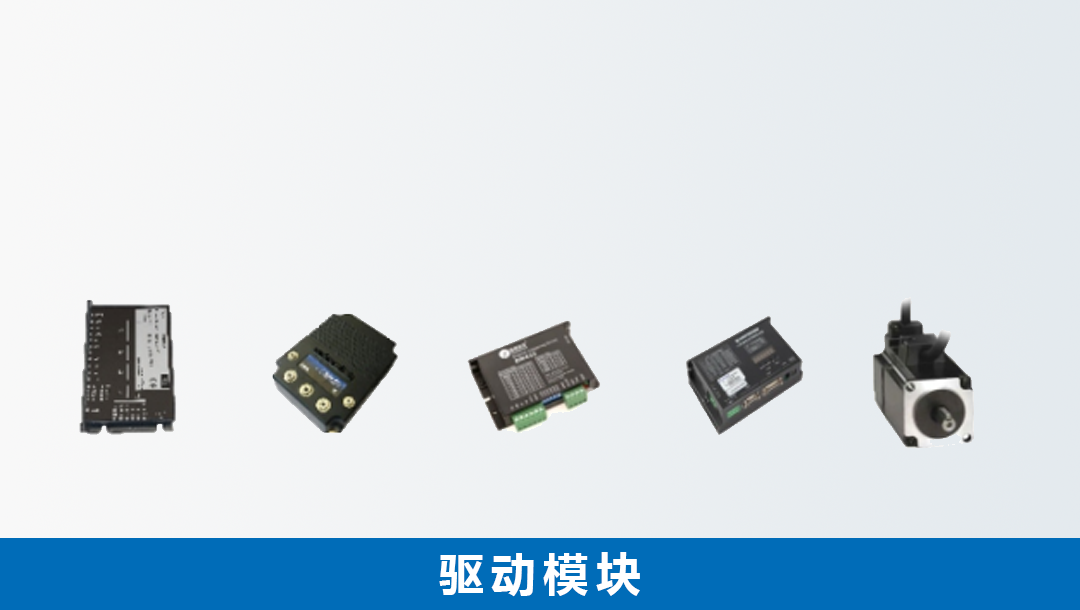
3、驅(qū)動(dòng)模塊:
驅(qū)動(dòng)模塊是幫助機(jī)器人移動(dòng)的關(guān)鍵部件。它可以控制機(jī)器人的速度和方向,讓機(jī)器人完成特定的任務(wù)。驅(qū)動(dòng)模塊的結(jié)構(gòu)和設(shè)計(jì)決定機(jī)器人的穩(wěn)定性、可靠性和運(yùn)動(dòng)能力。類似于人的四肢,通過雙輪差速或多輪全向,響應(yīng)中央主控器發(fā)送的速度消息,實(shí)時(shí)調(diào)節(jié)移動(dòng)速度與運(yùn)行方向,靈活轉(zhuǎn)向以精確到達(dá)目標(biāo)點(diǎn)。
4、安全檢測(cè)
安全檢測(cè)模塊是主要為移動(dòng)機(jī)器人提供安全保障,實(shí)現(xiàn)避障、繞障等功能,用于保護(hù)機(jī)器人和所有參與者的關(guān)鍵組成部分。它能夠識(shí)別機(jī)器人周圍的障礙物,并能夠提醒人們物體的位置和狀態(tài),從而避免了潛在的事故發(fā)生。

5、交互模塊
移動(dòng)機(jī)器人最大的特點(diǎn)就是具有良好的交互體驗(yàn)設(shè)計(jì),交互模塊是機(jī)器人與人之間“溝通”的重要部分,是識(shí)別理解和分析決策模塊的統(tǒng)稱。交互模塊主要包括呼叫模塊、手操器、車載顯示屏等。用戶可通過交互模塊下發(fā)指令,從而控制移動(dòng)機(jī)器人動(dòng)作。

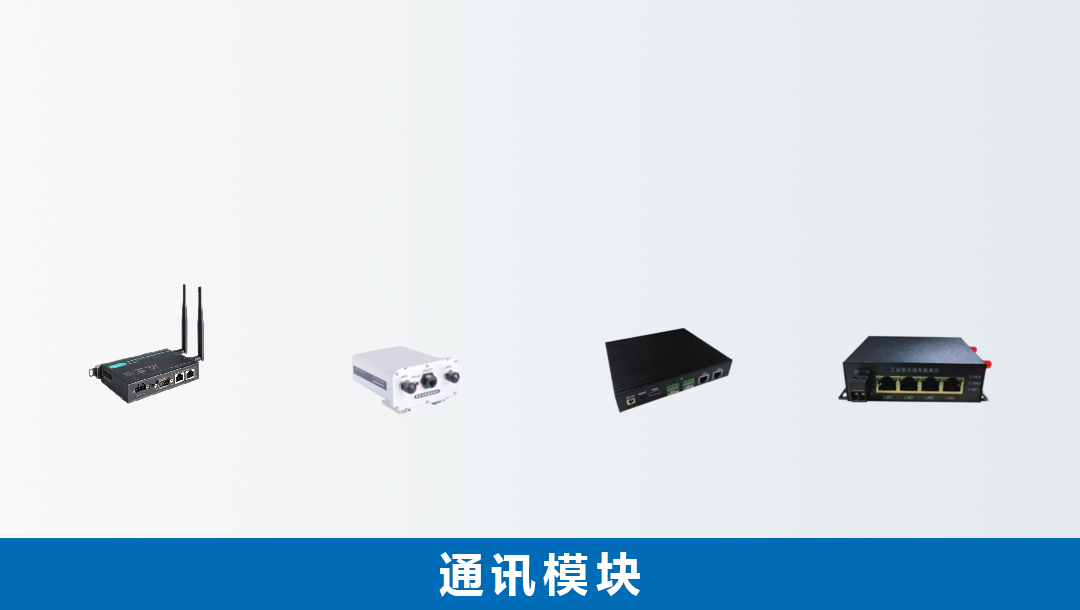
6、通訊模塊
通訊模塊是機(jī)器人遠(yuǎn)程控制和數(shù)據(jù)傳輸?shù)闹匾M成部分。它能夠在機(jī)器人和人之間建立有效的通信渠道,從而實(shí)現(xiàn)遠(yuǎn)程訪問和管理。通過與WIFI、激光或線路上埋設(shè)的導(dǎo)線進(jìn)行感應(yīng)通信,從而實(shí)現(xiàn)AGV/AMR之間的避碰調(diào)度、工作狀態(tài)檢測(cè)、任務(wù)的調(diào)度。
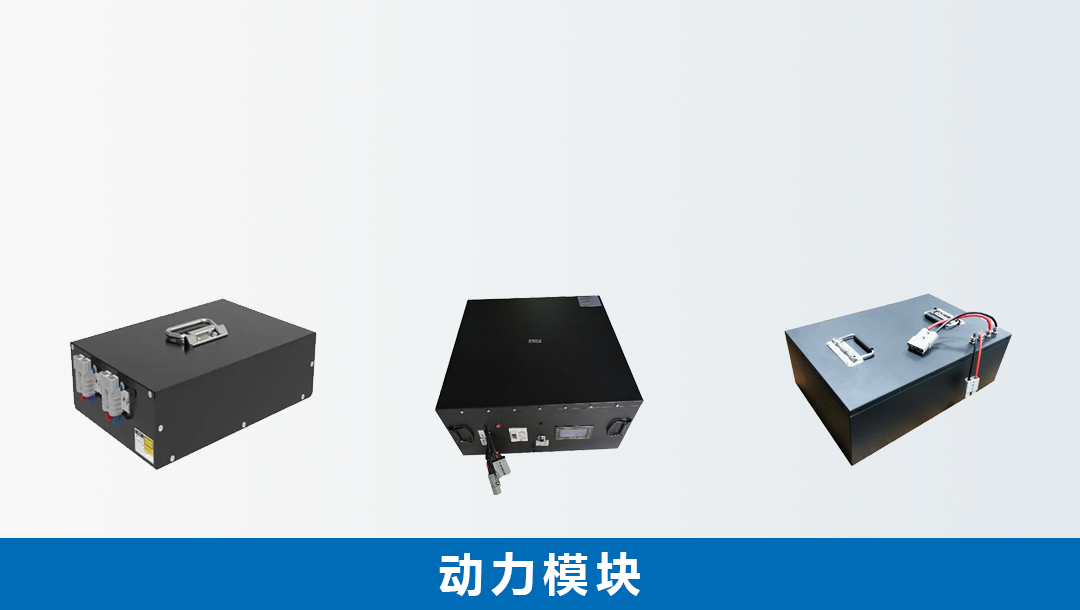
7、動(dòng)力模塊
電池是AGV/AMR動(dòng)力提供。AGV電池的種類主要有鉛酸蓄電池和鋰電池兩種。一般為蓄電池 24V,48V等,種類有鉛酸電池、鋰電池等。電池系統(tǒng)需具備檢測(cè)電池使用狀態(tài)、充電狀態(tài)并把狀態(tài)報(bào)告發(fā)送給控制中心。
8、執(zhí)行機(jī)構(gòu)
執(zhí)行機(jī)構(gòu)是是直接面向工作對(duì)象的機(jī)械裝置,相當(dāng)于人體的手和腳,也是機(jī)器人完成各項(xiàng)任務(wù)的關(guān)鍵部分,它能夠控制機(jī)器人的動(dòng)作。根據(jù)不同的工作對(duì)象,適用的執(zhí)行機(jī)構(gòu)也不同。

審核編輯黃宇
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222217 -
AMR
+關(guān)注
關(guān)注
3文章
477瀏覽量
32153 -
AGV
+關(guān)注
關(guān)注
28文章
1554瀏覽量
43664
發(fā)布評(píng)論請(qǐng)先 登錄
探索 NXP MR - CANHUBK344 評(píng)估板:為移動(dòng)機(jī)器人應(yīng)用賦能
MR-VMU-RT1176快速上手:開啟移動(dòng)機(jī)器人車輛管理單元設(shè)計(jì)之旅
MR-BMS771參考設(shè)計(jì):適用于移動(dòng)機(jī)器人的電池管理系統(tǒng)
Infineon移動(dòng)機(jī)器人電機(jī)控制方案深度解析
Infineon DEMO_IMR_BMSPWR_V1:移動(dòng)機(jī)器人電池管理系統(tǒng)的卓越之選
Infineon DEMO_IMR_BMSCTRL_V1:助力移動(dòng)機(jī)器人電池管理的創(chuàng)新方案
移動(dòng)機(jī)器人“芯”引擎爆發(fā),禾賽、海思新品逆襲

安森美產(chǎn)品如何助力打造下一代自主移動(dòng)機(jī)器人
移動(dòng)機(jī)器人技術(shù)的發(fā)展歷程
恩智浦自主移動(dòng)機(jī)器人設(shè)計(jì)要點(diǎn)

瑞芯微 RK3568/3588:為移動(dòng)機(jī)器人注入智慧動(dòng)力引擎
尋跡智行第三代自研移動(dòng)機(jī)器人控制器獲歐盟CE認(rèn)證

輪式移動(dòng)機(jī)器人電機(jī)驅(qū)動(dòng)系統(tǒng)的研究與開發(fā)
安森美在自主移動(dòng)機(jī)器人領(lǐng)域的發(fā)展成果
移動(dòng)機(jī)器人電機(jī)控制DEMO(原理圖+BOM+PCB)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論