當慣導系統的慣性測量部件安裝偏離飛機的質心一小段距離時,雖然陀螺儀的輸出不會受到影響,但是,由于存在切向加速度和向心加速度,會引起加速度計的測量誤差,這種現象稱為“桿臂效應”,如果基座安裝位置偏離飛機質心一小段距離rp,如圖1所示。
2020-07-14 07:55:00 7877
7877 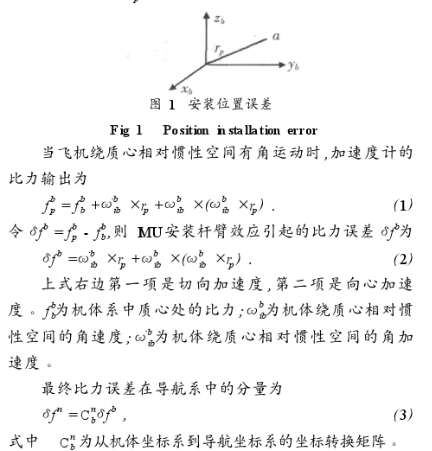
,隨著MEMS陀螺儀的興起,在車輛導航、機械控制等領域,精確導航的競爭一直在對峙。 ? 導航核心——陀螺慣性測量單元 ? 在高精度的捷聯慣導系統中,陀螺慣性測量單元是絕對的核心。很長一段時間以來,激光陀螺儀都是中高精度慣導系統
2023-10-24 01:11:003076 導航多用于軍事上。(2)慣性導航定位的連續性其他的導航定位系統定位時是一個個點,而慣性導航的地位卻是連續的曲線,這也是一大優勢。 3、慣性導航的局限當然了,之所以會出現衛星導航,還是因為慣性導航的確
2020-08-14 04:39:59
性導航系統 INS( Inertia Navigation System,以下簡稱慣導) 慣導是一種利用慣性傳感器測量載體的比力及角速度信息,并結合給定的初始條件實時推算速度、位置、姿態等參數的自主
2020-05-18 06:15:18
的物理平臺平臺式慣導:(下圖a所示)慣性傳感器安裝在一組框架上(平衡環),通過扭矩電機根據陀螺儀感應的旋轉來實現平臺的旋轉,使得平臺始終與導航系保持一致。因
2021-09-01 08:06:45
捷聯式慣性導航系統
2016-08-17 12:06:13
捷聯慣性導航技術,加速度與陀螺儀傳感器,控制attach://209539.pdf
2014-08-20 15:15:14
)可發現并標校慣導系統誤差, 提高導航精度。(2)彌補衛星導航的信號缺損問題,提高導航能力。(3)增加觀測冗余度,提高異常誤差的監測能力,提高系統的容錯功能。(4)提高導航系統的抗干擾能力,提高完好
2019-07-15 04:35:55
低成本的INS/ GPS 組合導航系統 ,是一類非常適合構建微型捷聯慣性導航系統的慣性傳感器。MEMS慣性傳感器的突出特點使其在眾多的民用和軍用領域具有廣闊的應用前景。
2020-05-18 06:28:30
傳統的姿態測量系統采用捷聯式慣導系統(SINS),相比平臺式慣導系統而言,其具有體積相對更小,成本相對更低,易于安裝和維護并且可靠性更高的有點,因此,捷聯慣導系統在飛行器導航和姿態測量中得到了廣泛的研究和應用。
2020-04-08 08:10:27
Verilog HDL語言有什么優越性Verilog HDL語言在FPGA/CPLD開發中的應用
2021-04-23 07:02:03
哪位高手做過labview捷聯慣導仿真?求個仿真程序參考下!!!!!
2010-11-23 15:07:46
項目名稱:低成本捷聯慣導試用計劃:申請理由:本人是一名在讀碩士研究生,學習過ARM cortex-M系列內核,熟練使用M3系列內核,對M4內核有些許學習,對捷聯慣性導航,嵌入式以及卡爾曼濾波等最優
2019-09-06 11:33:54
C6748核心板模式進行,利用核心板及DSP開發板進行前期算法驗證工作。故申請TMS320C6748 DSP開發板免費試用。項目描述:項目用于實現GNSS組合慣導接收機,GNSS衛星信號的解算提供長穩的精度,利用高精度慣導器件提供短穩精度,兩者組合采用捷聯式慣導進行組合運算,得到高精度的慣導信息。
2015-09-10 11:13:56
隨著用戶對車載導航定位精準度需求的提高,更多的商家開始攻克車載GPS弱環境下定位難題,目前,SKYLAB的解決方案是在車載導航中接入慣導模塊SKM-4DU,多次路測證明,基于慣性和衛星組合導航的慣導
2017-10-12 18:13:02
單片機為什么要使用C語言?8051介紹單片機C語言的優越性
2021-01-27 06:48:18
單片機為什么要使用C語言?單片機C語言的優越性是什么?
2021-10-15 07:48:01
傳統的姿態測量系統采用捷聯式慣導系統(SINS),相比平臺式慣導系統而言,其具有 體積相對更小,成本相對更低,易于安裝和維護并且可靠性更高的有點,因此,捷聯慣導系統在飛行器導航和姿態測量中得到了廣泛的研究和應用。
2019-09-04 08:01:32
什么是RSSI測距?基于RSSI的室內定位算法有什么優越性?
2021-05-31 06:00:18
。慣性導航,通俗的講就是用加速表和陀螺進行定位解算。這個東西最早是用在飛機,導彈,潛艇,衛星的定位和定姿上,近幾十年隨著MEMS器件的發展,使得慣性器件成本大大降低了,因此逐漸應民用化。另外GPS和慣導
2014-01-17 21:38:17
傳統的姿態測量系統采用捷聯式慣導系統(SINS),相比平臺式慣導系統而言,其具有 體積相對更小,成本相對更低,易于安裝和維護并且可靠性更高的有點,因此,捷聯慣導系統在飛行器導航和姿態測量中得到了廣泛
2019-08-22 07:27:31
我用adis16365做一款捷聯慣導,測試時發現靜止時或較小的晃動過后adis16365的陀螺漂移比較小,大約零點幾度每秒,但較大的晃動后再靜止,漂移變大,能達到約10度每秒,不知是什么原因,是adis16365出問題了嗎?還是電路設計有問題?謝謝。
2019-01-18 14:55:38
為什么要設計一個輪式小車慣性導航系統?輪式小車慣性導航系統的軟件裝置怎樣去設計?輪式小車慣性導航系統的硬件裝置怎樣去設計?如何去測試輪式小車慣性導航系統?
2021-04-19 11:35:46
脈沖電鍍電源的優越性及適用性:在脈沖導通期內,由于使用較高的電流密度,使晶核的形成速率遠遠大于原有晶體的生長速率,因此可形成結晶細致的鍍層。鍍層結晶細致則密度大、硬度高、孔隙率低,即:大大提高鍍層
2011-11-17 17:14:58
適應性強、易維護、壽命長。典型產品是美國諾格斯佩里公司研制成功的Mk39系列和Mk49型激光陀螺捷聯式艦船慣性導航系統、美國霍尼韋爾公司的激光捷聯慣導系統。光學陀螺的出現有力推動了捷聯慣性系統發展。第三代
2020-06-13 08:00:00
為了有效防止捷聯慣導系統濾波發散,本文從卡爾曼濾波原理出發,介紹了漸消卡爾曼濾波原理、遺忘因子等內容,通過對漸消因子的推導及計算機仿真,給出了常規卡爾曼濾波器
2009-05-30 08:49:53 24
24 高精度游移方位捷聯慣導系統的數字仿真::捷聯慣導系統的數字仿真對于系統設計、方案論證和算法研究有著重要的意義,特別是游移方位捷聯慣導系統. 因此通過完成軌跡發生
2009-06-21 22:37:3519 研究了光纖陀螺捷聯慣性導航系統中數據采集單元的設計與實現。系統選用Intel 80C196KC 單片機作為系統MCU,利用串口擴展芯片TL16C554 實現對三路光纖陀螺信號的數據采集,采用16 位
2009-07-08 16:27:0133 文章簡要介紹了WinDriver的性能特點和使用方法,并結合捷聯慣性導航系統的實際應用詳細討論了在VC++6.0環境下數據采集程序的編寫方法。關鍵詞:WinDriver; VC++6.0;中斷;驅動程序;
2009-08-07 14:50:4225 本文利用微型慣性測量元件和 GPS-OEM 板,以ARM 處理器為核心,設計了一種低成本、輕小型的嵌入式GPS/SINS 組合導航系統。文中介紹了捷聯慣導的原理和初始對準,給出了采用卡爾曼
2009-08-10 08:36:5845 介紹 ER-FINS-120 高精度高性能光纖慣性導航產品均為捷聯式慣性導航產品。該系列慣導產品的基本部件由三個相應等級的光纖陀螺儀
2024-12-25 15:36:33
鋰離子電池的優越性能有哪些?
我們經常說的鋰離子電池的優越性是針對于傳統的鎘鎳電池(Ni/Cd)和氫鎳電池(Ni/MH)來講的。那麼,鋰離子電池究竟
2009-11-04 14:20:031004 提出了一種捷聯式慣性測量單元的設計與實現方法。該系統以開環光纖陀螺和硅微加速度計作為慣性敏感元件,采用高速DSP 作為中央處理器實現數據采集、處理及輸出。重點介紹了系統
2011-09-13 15:01:5021 傳統的姿態測量系統采用捷聯式慣導系統(SINS),相比平臺式慣導系統而言,其具有 體積相對更小,成本相對更低,易于安裝和維護并且可靠性更高的有點,因此,捷聯慣導系統在
2012-11-21 09:48:361211 傳統的姿態測量系統采用捷聯式慣導系統(SINS),相比平臺式慣導系統而言,其具有體積相對更小,成本相對更低,易于安裝和維護并且可靠性更高的有點,因此,捷聯慣導系統在飛行
2013-01-14 10:53:592265 
當捷聯慣組(SIMU)安裝到載車上存在安裝誤差時,航位推算誤差與安裝誤差、里程計刻度系數誤差、初始對準誤差有關。利用捷聯慣導系統和航位推算系統構成組合導航系統可實現對上
2013-08-19 17:51:1028 文中針對水下自主航行器提出了一種新型的基于捷聯慣導(SINS)和GPS的組合導航系統設計方案。該方案以捷聯慣導作為主系統,同時利用GPS重調捷聯慣導系統,建立了該組合導航系統的
2013-08-20 11:33:2432 慣導基本知識:慣性導航,利用慣性元件(加速度計)來測量運載體本身的加速度,經過積分和運算得到速度和位置,從而達到對運載體導航定位的目的。
2016-01-07 16:28:360 本論文分上下兩篇,用于給現代捷聯慣導系統的主要軟件算法設計提供一個嚴密的綜合方法:將角速率積分成姿態角,將加速度變換或積分成速度以及將速度積分成位置。該算法是用兩速修正法構成的,而兩速修正法是具有
2016-12-12 21:50:542 本論文分上下兩篇,用于給現代捷聯慣導系統的主要軟件算法設計提供一個嚴密的綜合方法:將角速率積分成姿態角,將加速度變換或積分成速度以及將速度積分成位置。該算法是用兩速修正法構成的,而兩速修正法是具有
2016-12-12 21:50:546 捷聯慣導系統中微機械陀螺測試參數的分析與標定
2016-12-17 16:33:397 層次分析的慣導_重力匹配導航系統性能評估方法_陳晶
2017-03-19 19:03:122 基于DSP_MCU的小型捷聯慣性導航計算機系統
2017-10-20 08:21:0914 1 引言 捷聯慣性制導是隨著計算機技術的發展而發展起來的慣性制導技術,由于它是用一個數學平臺來代替平臺式慣性制導系統中的陀螺穩定平臺,因而具有成本低、結構簡單、體積小、可靠性高等優點。但正是由于沒有
2017-10-23 15:43:151 采用商用MEMS傳感器設計一種小型捷聯慣導系統。該系統利用外部16位AD高速采樣芯片進行傳感器數據采集,選用兩片TMS320F28335DSP作為數據預處理單元和導航解算單元,同時在初始對準和陀螺
2017-11-29 11:21:2722 針對捷聯慣導系統中初始對準的問題,本文采用了設計卡爾曼濾波器的方法,通過建立慣導系統的誤差模型,分析卡爾曼濾波的基本理論,以東向和北向速度誤差進行分析。通過初始對準計算機仿真結果,進一步驗證了該方法
2017-12-07 16:26:583 慣性導航系統 INS( Inertia Navigation System ,以下簡稱慣導 ) 慣導是一種利用慣性傳感器測量載體的比力及角速度信息,并結合給定的初始條件實時推算速度、位置、姿態等參數的自主式導航系統.具體來說慣性導航系統屬于一種推算導航方式。
2018-04-26 09:06:0071936 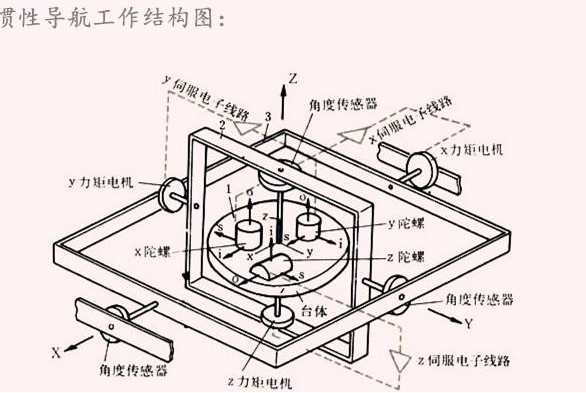
的瞬時速度和位置信息,具有不依賴外界信息、不向外界輻射能量、不受干擾、隱蔽性好的特點,且慣導系統能連續地提供載體的全部導航、制導參數(位置、線速度、角速度、姿態角)。
2018-03-02 16:23:3118989 導航系統無法工作時,利用慣性導航系統使得導航系統繼續工作,保證導航系統的正常工作,提高了系統的穩定性和可靠性。慣導模塊SKM-4DX特點:GNSS/INS組合導航定位技術;GNSS定位技術:BDS/GPS
2018-03-09 10:17:4425963 說到導航,很多人的第一反應就是基于GPS、北斗、GLONASS、GALILEO的衛星導航,最近SKYLAB推出了一個慣導模塊,很多客戶就開始懵了,什么是慣導模塊,慣導模塊有什么用呢?看過來,知識點
2018-03-16 15:54:2240 車載導航領域的車載組合導航模塊,采用GNSS/INS組合導航定位技術。憑借高精度六軸慣性器件,和成熟的慣導算法,無需里程計或速度信號接入,且無嚴格安裝要求,即使在隧道、車庫等環境下也能為車輛提供高精度
2018-08-08 12:33:404939 滿足導航系統設計的小型化、實時性要求,本文提出了一種基于FPGA+DSP的實現方案。該方案的設計思路是:將FPGA映射到DSP EMIF的一段地址空間,并用FPGA來完成多通道信號的采集;DSP根據
2018-11-07 17:18:2310 使用模擬設備的慣性測量單元(IMU)傳感器ADIS16470和PNI的地磁傳感器RM3100構建的捷聯慣性導航系統(SINS)。
2019-04-15 17:39:468507 
慣性導航系統(INS)以其自主的工作能力廣泛應用于軍事武備的導航、制導與控制系統和國民經濟的諸多領域。它的主要缺點是定位誤差隨其工作時間的增長而增大。對慣導系統的誤差進行估計和補償是在保證性能價格比
2019-09-19 08:00:0015 GPS組合慣導與慣性導航的的應用 即體系包含衛星定位體系(GPS/斗極/GNSS)和慣性定向定位導航體系(INS)的定向定位導航體系。 衛星定位導航體系具有精度高,可通訊的特點,可是需要從外界獲取
2020-06-11 11:33:305327 慣導在實現生活中應用的優缺點 慣性導航傳感器是傳感器眾多類型中的一種,是多個行業中不可缺少的檢測裝置。慣性導航傳感器系統一般由一個單片機,三個陀螺儀,和三個加速度傳感器組成。 我們在使用慣性導航
2020-03-30 16:33:343748 航空航天飛機中的慣導是怎么工作的 現如今慣導已經更新了幾代,大部分分機安裝的是高精度捷聯式慣導,跟之前笨重的平臺式慣導系統比較更方便輕巧。 慣性導航系統(INS)也稱作慣性參考系統是一種不依賴于外部
2020-06-11 11:26:094606 GPS組合慣導與慣性導航的的應用 即體系包含衛星定位體系(GPS/斗極/GNSS)和慣性定向定位導航體系(INS)的定向定位導航體系。 衛星定位導航體系具有精度高,可通訊的特點,可是需要從外界獲取
2020-03-28 11:24:294461 現如今慣導已經更新了幾代,大部分分機安裝的是高精度捷聯式慣導,跟之前笨重的平臺式慣導系統比較更方便輕巧。 慣性導航系統(INS)也稱作慣性參考系統是一種不依賴于外部信息、也不向外部輻射能量(如無線電導航
2020-06-15 11:09:199266 海上組合慣導的介紹(關于慣導在海上的應用) 海上組合導航海上組合導航體系大致可分為簡易型和大型兩類。 簡易型組合導航體系選用大規模集成電路、模塊結構和微型計算機控制,其長處是結構緊湊、牢靠、簡便
2020-03-28 10:19:162388 平臺式慣導系統的力學編排是指實現正確控制慣性平臺和解算導航參數的方案和方程,包括平臺指令角速度的計算公式、速度和位置的解算方程。
2020-03-30 08:00:000 組合慣導的的實際應用介紹 衛星組合慣導定位體系即體系包含衛星定位體系(GPS/斗極)和慣性定向定位導航體系(INS)的定向定位導航體系。 衛星定位導航體統具有精度高,可通訊的特點可是需要從外界獲取
2020-06-08 17:12:054552 GPS組合慣導的發展史 慣性導航系統-INS是一種不依賴于外部信息、也不向外部輻射能量的自主式導航系統。其工作環境不僅包括空中、地面,還可以在水下。慣導的基本工作原理是以牛頓力學定律為基礎,通過測量
2020-04-20 10:12:102489 GPS組合慣導的發展路程 慣性導航系統-INS是一種不依賴于外部信息、也不向外部輻射能量的自主式導航系統。其工作環境不僅包括空中、地面,還可以在水下。慣導的基本工作原理是以牛頓力學定律為基礎,通過
2020-04-18 00:34:141288 近年來,廣大科研工作者研究了各種減小壓電捷聯慣導系統的誤差方法,使壓電慣性器件的精度得到了極大的提高。本文介紹了一種實用的基于DSP實現的壓電捷聯慣導系統方案。
2020-04-22 10:10:211864 
GPS組合慣導的組成 慣性導航系統-INS是一種不依賴于外部信息、也不向外部輻射能量的自主式導航系統。其工作環境不僅包括空中、地面,還可以在水下。慣導的基本工作原理是以牛頓力學定律為基礎,通過測量
2020-05-18 15:48:433622 ,并自動進行積分運算獲得飛行器瞬時速度和瞬時位置數據的技術。組成慣性導航系統的設備都安裝在運載體內,工作時不依賴外界信息也不向外界輻射能量不易受到干擾,是一種自主式導航系統。捷聯式據陀螺儀的不同,分為速率型捷聯式慣性導航系統和位置
2020-05-18 16:51:156191 ,是一種自主式導航系統。 INS慣導系統慣性導航系統是一種利用安裝在運載體上的陀螺儀和加速度計來測定運載體位置的一個系統。通過陀螺儀和加速度計的測量數據,可以確定運載體在慣性參考坐標系中的運動,同時也能夠計算出運載體在慣
2020-05-18 16:59:142850 國內GPS組合慣導的發展 捷聯慣性系統由于結構簡單、可靠性好、體積小、重量輕、成本低、容易維修等特點,近年來得到很快的發展,并且在一些戰術武器中得到應用。由于精度尚未達到平臺系統的精度水平,所以
2020-05-18 17:01:021831 慣性測量單元的應用 慣性測量單元用于安裝了慣性導航系統的交通工具。如今,幾乎每個商業或軍事船只都安裝了慣性測量單元。大多數飛機也配備了慣性測量單元。同時,慣性測量單元也在飛行器中單獨使用,將慣性測量
2020-04-26 11:28:341374 國內GPS組合慣導的發展 捷聯慣性系統由于結構簡單、可靠性好、體積小、重量輕、成本低、容易維修等特點,近年來得到很快的發展,并且在一些戰術武器中得到應用。由于精度尚未達到平臺系統的精度水平,所以
2020-04-26 11:10:001676 慣性導航系統是一種不依賴于外部信息、也不向外部輻射能量的自主式導航系統,廣泛應用在軍機、民機、戰車、制導武器、火控系統、水下兵器等裝備上,其具有如下優點: 應用場景: 在慣導系統的設計驗證、生產組
2020-04-27 11:51:442206 車載系統中慣導的應用 從慣性導航的定義來看,慣性導航是一種通過測量飛行器的加速度,并自動進行積分運算,獲得飛行器瞬時速度和瞬時位置數據的技術。組成慣性導航系統的設備都安裝在運載體內,工作時不依賴外界
2020-06-08 14:41:522580 CAN屬于現場總線的范疇,它是一種有效支持分布式控制或實時控制的串行通信網絡。較之許多RS-485基于R線構建的分布式控制系統而言,基于CAN總線的分布式控制系統在以下方面具有明顯的優越性。
2020-06-10 11:12:532283 近年來,慣性技術不論在軍事上、工業上,還是在民用上,特別是消費電子產品領域,都獲得了廣泛的應用,大到潛艇、艦船、高鐵、客機、導彈和人造衛星,小到醫療器械、電動獨輪車、小型四旋翼無人機、空中鼠標和手機
2020-08-20 08:00:009 慣性導航系統(INS,以下簡稱慣導)是一種不依賴于外部信息、也不向外部輻射能量的一種自主式導航系統,主要由陀螺儀和加速度計兩部分組成。
2020-10-20 16:11:574004 、操作簡單、可靠性高,催生了觸摸屏武器控制系統的誕生,如美軍的單兵觸摸式GPS導航儀、德軍的觸摸式火炮瞄準系統等。我國的捷聯慣導系統起步較晚,但由于國內相關器件(如:激光陀螺、加速度計)的制造技術相繼
2021-03-29 10:48:304311 
基于視覺/慣導的無人機組合導航算法綜述
2021-06-23 15:52:2019 MEMS陀螺捷聯慣導系統標定方法綜述
2021-08-05 16:54:136 傳統的姿態測量系統采用捷聯式慣導系統(SINS),相比平臺式慣導系統而言,其具有體積相對更小,成本相對更低,易于安裝和維護并且可靠性更高的有點
2022-03-29 11:02:341980 
MEMS 陀螺慣組的數學模型,標定和補償是提高 MEMS 慣組性能 是一篇值得學習的文章。
2022-07-04 14:50:572 經作者同意不得應用于商業目的。
PSINS工具箱主要應用于捷聯慣導系統的數據處理和算法驗證開發,它包括慣性傳感器數據分析、慣組標定、初始對準、慣導AVP(姿態-速度-位置)更新解算、組合導航Kalman濾波等功能。
2022-10-31 15:36:101 在慣導系統中慣性傳感器(陀螺和加速度計)直接與運載體固連,通過導航計算機采集慣性器件的輸出信息并進行數值積分求解運載體的姿態、速度和位置等導航參數。
2023-02-21 09:52:251831 在慣導系統中慣性傳感器(陀螺和加速度計)直接與運載體固連,通過導航計算機采集慣性器件的輸出信息并進行數值積分求解運載體的姿態、速度和位置等導航參數,這三組參數的求解過程即所謂的姿態更新算法、速度更新算法和位置更新算法。
2023-02-21 09:53:273751 MEMS(微機電系統)是指集機械元件、微傳感器、信號處理與控制電路、接口電路、通信和電源為一體的完整的微機電系統。MEMS慣性傳感器可以組成低成本的INS/GPS組合導航系統。它是一種非常適合構建小型捷聯慣導系統的慣性傳感器。MEMS慣性傳感器的突出特性使其在許多民用和軍事領域具有廣闊的應用前景。
2023-07-19 09:21:573833 電子發燒友網站提供《CAN總線改造后的客車電控氣動換擋系統的優越性介紹.pdf》資料免費下載
2023-11-06 10:00:350 電子發燒友網站提供《使用ADIS16470和PNI地磁傳感器RM3100構建的捷聯慣性導航系統.pdf》資料免費下載
2023-11-22 10:34:483 全球導航衛星系統(GNSS)模塊的慣導技術是一項頗具前瞻性的科技,它結合了全球定位系統和慣性導航技術,為各個領域的定位需求提供了更為精準和可靠的解決方案。本文將深入探討GNSS模塊的慣導技術,以及它
2024-02-01 14:12:111374 艦艇慣導系統通過慣性測量裝置獲取艦艇運動參數,實現自主、連續、隱蔽的導航,提供航向、速度等關鍵信息。未來趨勢包括高精度化、多傳感器融合和自主導航能力提升,為船舶航行帶來更多便利和安全。
2024-09-30 15:46:271508
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論