完善資料讓更多小伙伴認識你,還能領(lǐng)取20積分哦,立即完善>
標簽 > ethercat
EtherCAT(以太網(wǎng)控制自動化技術(shù))是一個以以太網(wǎng)為基礎(chǔ)的開放架構(gòu)的現(xiàn)場總線系統(tǒng),EtherCAT名稱中的CAT為Control Automation Technology(控制自動化技術(shù))首字母的縮寫。
文章:1345個 瀏覽:45266次 帖子:99個
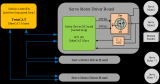
恩智浦MCU方案 單顆i.MX RT1180實現(xiàn)EtherCAT+伺服控制
介紹基于單顆i.MX RT1180芯片的EtherCAT+伺服電機控制方案-伺服控制板硬件電路資源介紹,即為下圖中的Servo Motor Driver...
運動控制系統(tǒng)處理機械系統(tǒng)中一個或多個坐標上的運動以及運動之間的協(xié)調(diào),實現(xiàn)精確的位置控制、速度和加速度控制、轉(zhuǎn)矩和力的控制等。

開發(fā)者分享 | 一次完整的 HPM EtherCAT 實戰(zhàn):環(huán)境、通信與極限測試
概要1、vscode開發(fā)環(huán)境搭建2、EtherCAT與RK3562通訊測試3、編程IGH主站+HPM極限通訊測試4、ADC+EUI顯示測試5、ADC遠采...
EtherCAT 是開放的實時以太網(wǎng)通訊協(xié)議,由德國倍福自動化有限公司研發(fā)。EtherCAT 具有高性能、低成本、容易使用等特點,目前在工業(yè)自動化領(lǐng)域有...
需要正確安裝和連接EtherCAT總線適配器和伺服驅(qū)動器。適配器負責將你的控制系統(tǒng)連接到EtherCAT總線網(wǎng)絡(luò),而伺服驅(qū)動器是用于控制伺服電機的設(shè)備。
2024-01-24 標簽:以太網(wǎng)總線伺服系統(tǒng) 1.1萬 0
在配置和添加某些品牌的EtherCAT總線伺服驅(qū)動器或者步進時,會出現(xiàn)軸無法使能,或者不能使用MC功能塊控制其正常運動的情況。

本視頻介紹了EtherCAT?協(xié)議的基本概念和功能原理。此外,還介紹了Microchip LAN9252 EtherCAT?從控制器,對其架構(gòu)和工作模式...
EtherCAT(Ethernet for Control Automation Technology)是一種基于以太網(wǎng)的實時工業(yè)現(xiàn)場總線通訊協(xié)議,由德...
EtherCAT和ethernet通信協(xié)議的區(qū)別
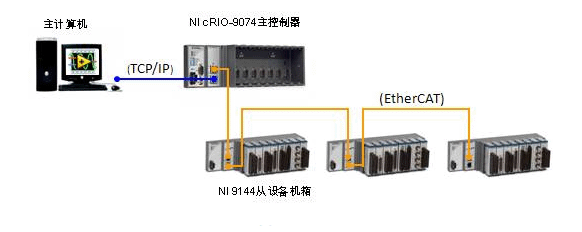
EtherCAT在標準的以太網(wǎng)電纜上應用主/從式的構(gòu)架。美國國家儀器公司的EtherCAT主設(shè)備由帶有兩個以太網(wǎng)端口的實時控制器構(gòu)成,如NI Compa...
開發(fā)者分享 | 面向工業(yè)應用的 HPM5E00 實踐:ADC、SDM 與 EtherCAT
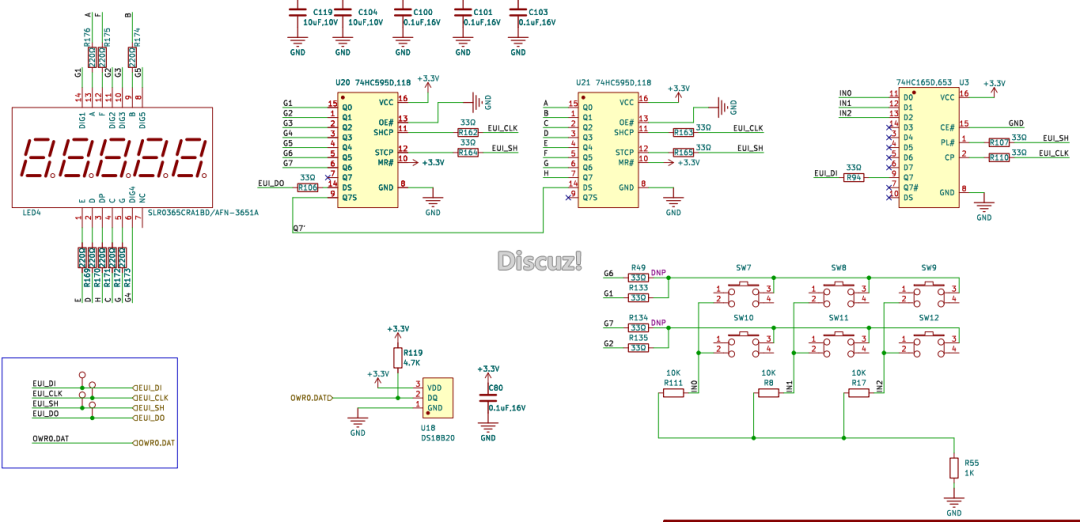
概要1、EUI的簡單使用2、16位ADC采樣實驗3、SDM對Σ-Δ調(diào)制器輸出數(shù)據(jù)采樣4、外置SRAM模擬為U盤5、EtherCatio示例實踐一、EUI...
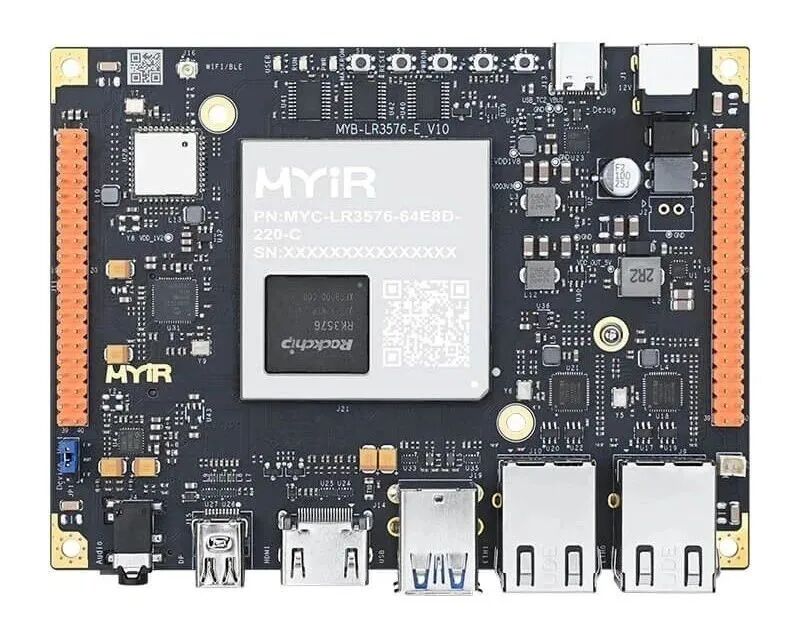
如何移植EtherCAT Igh--基于米爾RK3576開發(fā)板
本文將介紹基于米爾電子MYD-LR3576開發(fā)板(米爾基于瑞芯微RK3576開發(fā)板)的板端移植EtherCATIgh方案的開發(fā)測試。摘自優(yōu)秀創(chuàng)作者-EP...
在Windows系統(tǒng)上穩(wěn)定實現(xiàn)EtherCAT主站的兩種思路
今天,EtherCAT已經(jīng)是世界上最受歡迎的實時以太網(wǎng)解決方案之一。EtherCAT技術(shù)團隊(ETG)負責給所有正在使用和將要使用的用戶朋友們開放Eth...
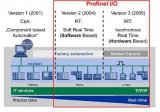
兩種最流行的工業(yè)實時以太網(wǎng):EtherCAT和Profinet有何不同?
說到工業(yè)實時以太網(wǎng),目前最風光和流行的莫過于EtherCAT了。 EtherCAT是一種開放式總線,憑借其良好的以太網(wǎng)特性和硬實時功能,目前各大主流工控...
CAN總線和EtherCAT是兩種在工業(yè)自動化和控制領(lǐng)域廣泛應用的通信總線協(xié)議,它們各自具有獨特的技術(shù)特點和應用場景。以下是對CAN總線和EtherCA...

匯川Easy系列全場景緊湊型中小型控制器全系列8個機型,滿足用戶對中小型自動化設(shè)備各種需求,適用于嚴苛體積、多軸運控、溫度控制、通信組網(wǎng)等場景。
在EtherCAT網(wǎng)絡(luò)通訊過程中,網(wǎng)絡(luò)分析和故障排除是開發(fā)中必要的一環(huán),但EthaerCAT網(wǎng)絡(luò)數(shù)據(jù)包十分復雜,且數(shù)據(jù)包數(shù)量多,數(shù)據(jù)實時性強。由于這些特...
2022-11-16 標簽:網(wǎng)絡(luò)通訊ethercat 8.7k 0

不止10倍提速!PCIe EtherCAT實時運動控制卡XPCIE1032H 等您評測!
PCIe實時運動控制卡助力EtherCAT高速高精運動控制應用!
2023-06-26 標簽:運動控制卡ethercat正運動技術(shù) 8.6k 0
本節(jié)主要介紹XPLC006E多軸經(jīng)濟型EtherCAT總線運動控制器控制EtherCAT總線驅(qū)動器的方法,分別介紹硬件接線方法,控制器與EtherCAT...
周期抖動2μs!RK3576的IgH EtherCAT工業(yè)級主站方案很厲害
本文將基于飛凌嵌入式OK3576-C開發(fā)板,通過1ms周期同步速度模式與125μs周期同步轉(zhuǎn)矩模式的實測對比,展示在CPU隔離核與滿負載壓力下,系統(tǒng)如何...
2026-01-23 標簽:嵌入式ethercatEtherCAT主站 7.9k 0
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 長沙勒克斯教育咨詢有限公司
湖南省長沙市開福區(qū)月湖街道匍園路20號聚恒科技園1棟2301-1房
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023036445號-105-1
工商網(wǎng)監(jiān)
湘ICP備2023036445號-105-1

