 恩智浦MCU方案 單顆i.MX RT1180實現EtherCAT+伺服控制
恩智浦MCU方案 單顆i.MX RT1180實現EtherCAT+伺服控制

硬件平臺簡介
文接上篇,本篇繼續介紹基于單顆i.MX RT1180芯片的EtherCAT+伺服電機控制方案-伺服控制板硬件電路資源介紹,即為下圖中的Servo Motor Driver Board。
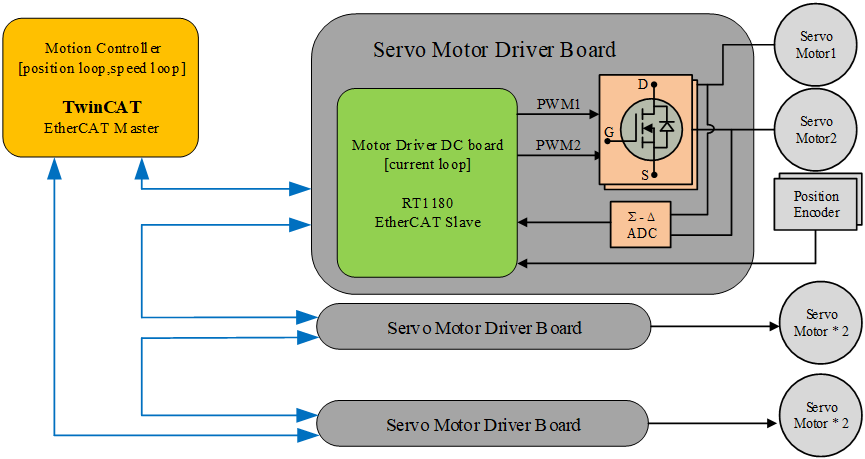
參考設計的硬件平臺基于i.MX RT1180為主控芯片設計的,主要分為兩個部分:
控制子卡,XSERVO-MTR-DC
功率板XSERVO-MTR-PSG
以下分別簡單概括兩個板卡的功能介紹。
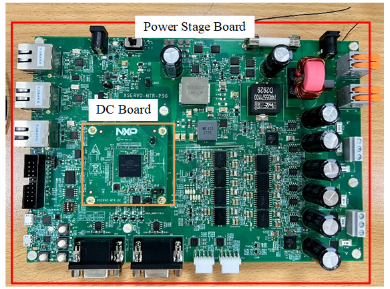
XSERVO-MTR-DC:
子卡功能是芯片的引腳引出到高速排插,以及芯片上電時序電路,SAR-ADC參考電平選擇,Sinc-Filter參考時鐘選擇,芯片reset電路。子卡不存在電源電路,所有電源均來自功率板。
XSERVO-MTR-PSG
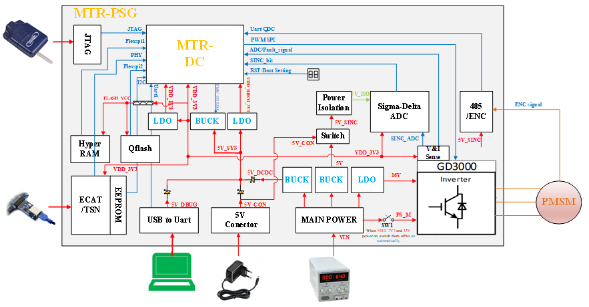
將該參考設計分為了兩個硬件部分,是為了方便后續其他芯片對應的功能驗證,只需重新設計子卡即可。功率板囊括了應用的絕大部分硬件功能,主要包括:功率、數字電源部分,高速網絡接口部分,絕對式(485)、增量式編碼器接口電路,串口、CAN接口電路,運放采樣電路、Sigma-Delta ADC采樣電路,電機驅動電路,LED,按鈕電路,電機故障保護電路。
該參考設計應用到i.MX RT1180的主要功能如下圖所示,并將與其連接的外圍電路芯片型號標注其中。
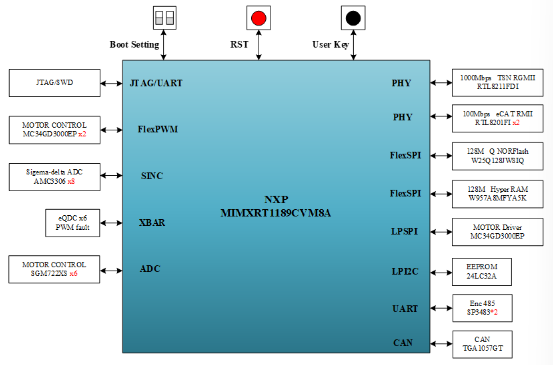
其中I2C連接的EEPROM用于EtherCAT使用。除了用于絕對式編碼器讀取信息的兩組UART口,還連接了三個串口轉USB方便用戶調試,未在圖中標出。
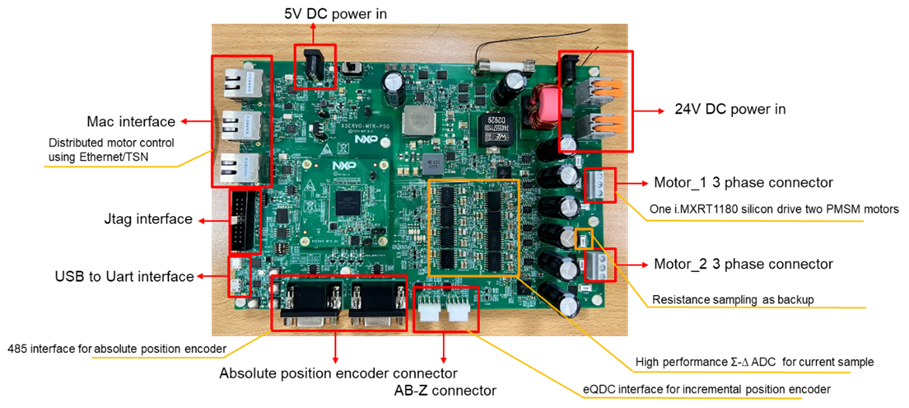
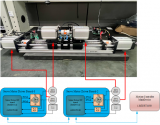
上圖為實際板卡圖片,標注出了對應各個部分的應用,與相關電源接口。該板有兩個電源接口,分別是5V電源接口和24V電源接口,其中5V電源接口用于常規非電機控制等應用時調試,與此同時5V供電也可以通過USB接口進行供電。
需要注意的是24V供電和5V供電接口相同,需要自行進行區分。24V供電有兩種方式,一種就是和5V供電相同的接口,另一種是卡線接口的方式。下面給出了整個板子的電源與外圍電路的布局安排供用戶更方便理解硬件。
通過本次介紹,相信大家已經對基于i.MX RT1180實現EtherCAT通信與伺服控制的整體方案有了初步的了解。
從雙核架構的高性能處理,到原生支持工業以太網協議,再到在伺服控制中的精準響應,i.MX RT1180展現了其在工業自動化領域的強大潛力。它不僅是一顆芯片,更是一套集成度高、實時性強、安全性優的解決方案。
接下來,我們也歡迎大家進一步交流探討,共同推動這項技術在更多實際場景中的落地應用!
恩智浦致力于打造安全的連接和基礎設施解決方案,為智慧生活保駕護航。
-
mcu
+關注
關注
147文章
18669瀏覽量
388935 -
NXP
+關注
關注
61文章
1379瀏覽量
195228 -
恩智浦
+關注
關注
14文章
6060瀏覽量
136656 -
工業控制
+關注
關注
38文章
1620瀏覽量
90223 -
伺服控制
+關注
關注
5文章
159瀏覽量
23462 -
i.MX
+關注
關注
1文章
62瀏覽量
40280 -
ethercat
+關注
關注
19文章
1400瀏覽量
43703
原文標題:i.MX RT1180實現EtherCAT+伺服控制
文章出處:【微信號:NXP_SMART_HARDWARE,微信公眾號:恩智浦MCU加油站】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
在恩智浦i.MX RT1180跨界處理器上如何實現1588協議同步

i.MX RT1180實現EtherCAT+伺服控制的終極實踐
使用恩智浦i.MX RT700跨界MCU打造智能手表
恩智浦推出i.MX 952人工智能應用處理器
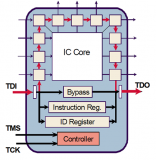
恩智浦i.MX RT1180 MCU如何進入Boundary Scan模式

RT1180 XMCD的特點和使用注意事項

恩智浦i.MX RT1180跨界MCU助力下一代伺服控制系統
恩智浦i.MX RT1180跨界處理器如何選型

基于恩智浦i.MX RT1180芯片的EtherCAT+伺服電機控制方案

恩智浦i.MX 95系列MPU如何賦能邊緣計算

如何實現安卓與恩智浦i.MX RT1170的無線投屏與控制

恩智浦推出FRDM i.MX 93開發板
恩智浦i.MX 94應用處理器如何變革工業和汽車連接
恩智浦i.MX RT1180 EtherCAT外設中SM FMMU功能介紹及應用






 工商網監
工商網監
評論