在萬米高空的飛行中,你是否曾想象過,與地面世界的連接可以突破舷窗的限制?航空機載通信技術(shù)的出現(xiàn),讓“云端上網(wǎng)”從科幻走進(jìn)現(xiàn)實。作為繼機票價格、航班時刻后影響乘客選擇的第三大因素,空中上網(wǎng)服務(wù)正以其強勁的市場潛力,重塑航空出行的體驗邏輯。
2025-12-31 17:11:15 1160
1160 一、產(chǎn)品概述雷達(dá)流量計是一款基于毫米波雷達(dá)技術(shù)的全自動流量計,產(chǎn)品采用了K波段平板雷達(dá)技術(shù),結(jié)合調(diào)頻連續(xù)波(FMCW)雷達(dá)的測距功能進(jìn)行精準(zhǔn)水位測量,同時雷達(dá)流速探頭向水面發(fā)射接收電磁波,由多普勒
2025-12-30 09:29:18
UART內(nèi)核在接收數(shù)據(jù)時有哪些具體操作?UART內(nèi)核在接收數(shù)據(jù)完成后會進(jìn)行哪些處理?
2025-12-25 07:15:56
UART內(nèi)核保存接收的數(shù)據(jù)時使用的是什么模式
2025-12-25 06:55:09
車載激光雷達(dá)接收端車規(guī)電容需通過 快速充放電設(shè)計 (如低ESR、高紋波電流耐受、優(yōu)化陽極箔蝕刻工藝)滿足高頻脈沖需求,同時采用 抗強光干擾設(shè)計 (如光學(xué)濾波、信號處理算法優(yōu)化、電磁屏蔽、智能監(jiān)測
2025-12-17 15:54:32148 電能質(zhì)量在線監(jiān)測裝置的數(shù)據(jù)壓縮功能對性能的影響 總體可控且輕微 ,核心集中在「CPU 占用、內(nèi)存消耗、存儲讀寫速度、數(shù)據(jù)傳輸延遲」四大維度,且通過廠商優(yōu)化(硬件加速、算法選型、資源調(diào)度)可將負(fù)面影響
2025-12-17 10:28:26211 
標(biāo)志位;
步驟 9:設(shè)置 UARTx_CR1.RXEN 為 1 使能接收;
步驟 10:查詢等待 UARTx_ISR.RC 標(biāo)志位置 1,確認(rèn)接收完一幀數(shù)據(jù) ;
步驟 11:查詢錯誤標(biāo)志
2025-12-16 08:19:11
電能質(zhì)量在線監(jiān)測裝置支持 無損壓縮 和 有損壓縮 兩大類算法,適配不同數(shù)據(jù)類型(實時數(shù)據(jù)、歷史數(shù)據(jù)、波形數(shù)據(jù))與應(yīng)用場景(存儲 / 傳輸 / 故障追溯),且在基礎(chǔ)型、增強型、電網(wǎng)級裝置中支持力度逐步
2025-12-12 14:08:38281 
產(chǎn)品別稱:電力氣象災(zāi)害監(jiān)測與預(yù)測預(yù)警系統(tǒng)、架空輸電線路微氣象監(jiān)測裝置、多維微氣象監(jiān)測裝置、輸電線路微氣象數(shù)據(jù)分析系統(tǒng)一、行業(yè)動態(tài):氣象災(zāi)害成電網(wǎng)安全主要威脅近年來,隨著全球氣候變化加劇,極端天氣
2025-12-10 11:18:41
電能質(zhì)量在線監(jiān)測裝置的監(jiān)測數(shù)據(jù)會通過“本地存儲 + 遠(yuǎn)程備份”的雙層架構(gòu)實現(xiàn)數(shù)據(jù)留存,再通過“裝置本地基礎(chǔ)分析 + 上位機 / 云端深度分析” 的分級模式完成數(shù)據(jù)解讀,整體流程符合 GB/T
2025-12-05 17:58:363240 電能質(zhì)量在線監(jiān)測裝置 普遍支持離線本地查看數(shù)據(jù) ,這是其標(biāo)準(zhǔn)功能之一,主要通過以下幾種方式實現(xiàn): 一、本地存儲能力 所有主流電能質(zhì)量在線監(jiān)測裝置均具備 內(nèi)置存儲介質(zhì) (如 SD 卡、固態(tài)硬盤或閃存
2025-12-05 17:18:08965 
是的,電能質(zhì)量在線監(jiān)測裝置的數(shù)據(jù)推送頻率完全支持手動調(diào)整 ,現(xiàn)代裝置普遍提供 差異化、精細(xì)化的頻率配置能力 ,可根據(jù)不同數(shù)據(jù)類型(穩(wěn)態(tài) / 暫態(tài) / 事件)和應(yīng)用場景(電網(wǎng)調(diào)度 / 用戶側(cè)管理
2025-12-05 15:08:23231 
電能質(zhì)量在線監(jiān)測裝置的數(shù)據(jù)推送頻率 可靈活配置 ,根據(jù)數(shù)據(jù)類型(穩(wěn)態(tài) / 暫態(tài) / 事件)和應(yīng)用場景(電網(wǎng)關(guān)口 / 工業(yè)用戶 / 新能源并網(wǎng))的不同, 覆蓋從毫秒級到小時級的廣泛范圍 ,主流裝置支持
2025-12-05 15:07:07274 
隨著環(huán)境污染問題的日益凸顯,對河流水環(huán)境進(jìn)行大范圍、實時、精準(zhǔn)的監(jiān)測變得至關(guān)重要。傳統(tǒng)的地面監(jiān)測方法耗時費力,且難以反映水體的整體空間異質(zhì)性。機載高光譜成像技術(shù),作為一種新興的“天空之眼”,憑借其
2025-12-02 11:26:00230 
無人機機載DC/DC電源輸入機載蓄電池產(chǎn)生的直流電,經(jīng)整流、濾波后得到滿足儀器要求的直流穩(wěn)壓電源。
2025-11-14 10:39:5810269 
現(xiàn)代電能質(zhì)量在線監(jiān)測裝置支持的通信協(xié)議覆蓋工業(yè)、電力、物聯(lián)網(wǎng)等多領(lǐng)域,可滿足實時數(shù)據(jù)傳輸、文件共享、遠(yuǎn)程控制等需求。以下是核心協(xié)議分類及典型應(yīng)用場景: 一、工業(yè)級實時通信協(xié)議 1. Modbus
2025-11-12 11:54:57187 數(shù)字陣列雷達(dá)是一種全新體制的雷達(dá),它是由天線單元、數(shù)字陣列模塊(DAM)、參考時鐘、大容量數(shù)據(jù)傳輸系統(tǒng)、信號處理機和顯示系統(tǒng)組成。其中DAM 是數(shù)字陣列雷達(dá)的核心,它包括分布式頻率源、l6個T/R組件以及數(shù)字采集與數(shù)字信號產(chǎn)生等,將傳統(tǒng)的接收與發(fā)射集成為一個整體,是一個完整的雷達(dá)傳感器單元。
2025-11-11 14:27:056878 
電能質(zhì)量在線監(jiān)測裝置的暫態(tài)數(shù)據(jù)補傳通過 本地緩存存儲、觸發(fā)條件識別、協(xié)議級斷點續(xù)傳、數(shù)據(jù)完整性校驗 等多重機制協(xié)同實現(xiàn),確保通信中斷期間的高頻暫態(tài)波形(如短路、雷擊等事件數(shù)據(jù))在網(wǎng)絡(luò)恢復(fù)后完整、準(zhǔn)確
2025-11-09 16:43:521103 基礎(chǔ)參數(shù)配置通過裝置本地界面或管理平臺,可直接設(shè)置數(shù)據(jù)推送的固定周期。
2025-11-08 16:52:051896 電能質(zhì)量在線監(jiān)測裝置的數(shù)據(jù)推送頻率調(diào)整對數(shù)據(jù)準(zhǔn)確性的影響需從 采樣、處理、傳輸 三個核心環(huán)節(jié)綜合評估,其關(guān)鍵取決于 調(diào)整策略與裝置設(shè)計的匹配度 。以下是基于技術(shù)原理與工程實踐的詳細(xì)分析: 一、核心
2025-11-07 11:08:58513 物理鏈路斷開 :當(dāng)裝置檢測到以太網(wǎng)接口(RJ45)斷開、光纖光功率異常(接收光功率<-30dBm)或 4G/5G 信號 RSSI 值<-100dBm 時,立即啟動本地暫態(tài)數(shù)據(jù)存儲,并在通信恢復(fù)后觸發(fā)補傳。例如,某變電站裝置在光纖中斷后,50ms 內(nèi)完成切換并開始緩存暫
2025-11-06 13:43:01136 電能質(zhì)量在線監(jiān)測裝置的報警記錄歷史數(shù)據(jù)追溯需結(jié)合 數(shù)據(jù)存儲位置、訪問權(quán)限、分析工具 等多維度操作,以下是分步驟的實操指南: 一、明確數(shù)據(jù)存儲位置與訪問方式 根據(jù)裝置部署架構(gòu),歷史數(shù)據(jù)通常存儲在 本地
2025-11-05 13:57:27370 飛行時間(Time-of-Flight,TOF)和連續(xù)波調(diào)頻型(Frequency-Modulated Continuous Wave,F(xiàn)MCW)兩種。 圖片源自:網(wǎng)絡(luò) 脈沖型TOF激光雷達(dá)雷達(dá)的工作原理比較直觀,發(fā)射器每隔一段時間發(fā)出一個極窄的激光脈沖,遇到障礙物后反射回來,接收器記錄發(fā)
2025-11-04 10:42:14659 
微波雷達(dá)和毫米波雷達(dá)有什么區(qū)別 前言:不知道大家有沒有發(fā)現(xiàn),各種雷達(dá)模塊的使用開始逐漸加入各種智能家居產(chǎn)品了,像人來燈亮,人走燈滅這種雷達(dá)感應(yīng)的產(chǎn)品早幾年就開始進(jìn)入市場了,還有各種感應(yīng)開關(guān)等產(chǎn)品
2025-10-30 16:56:391760 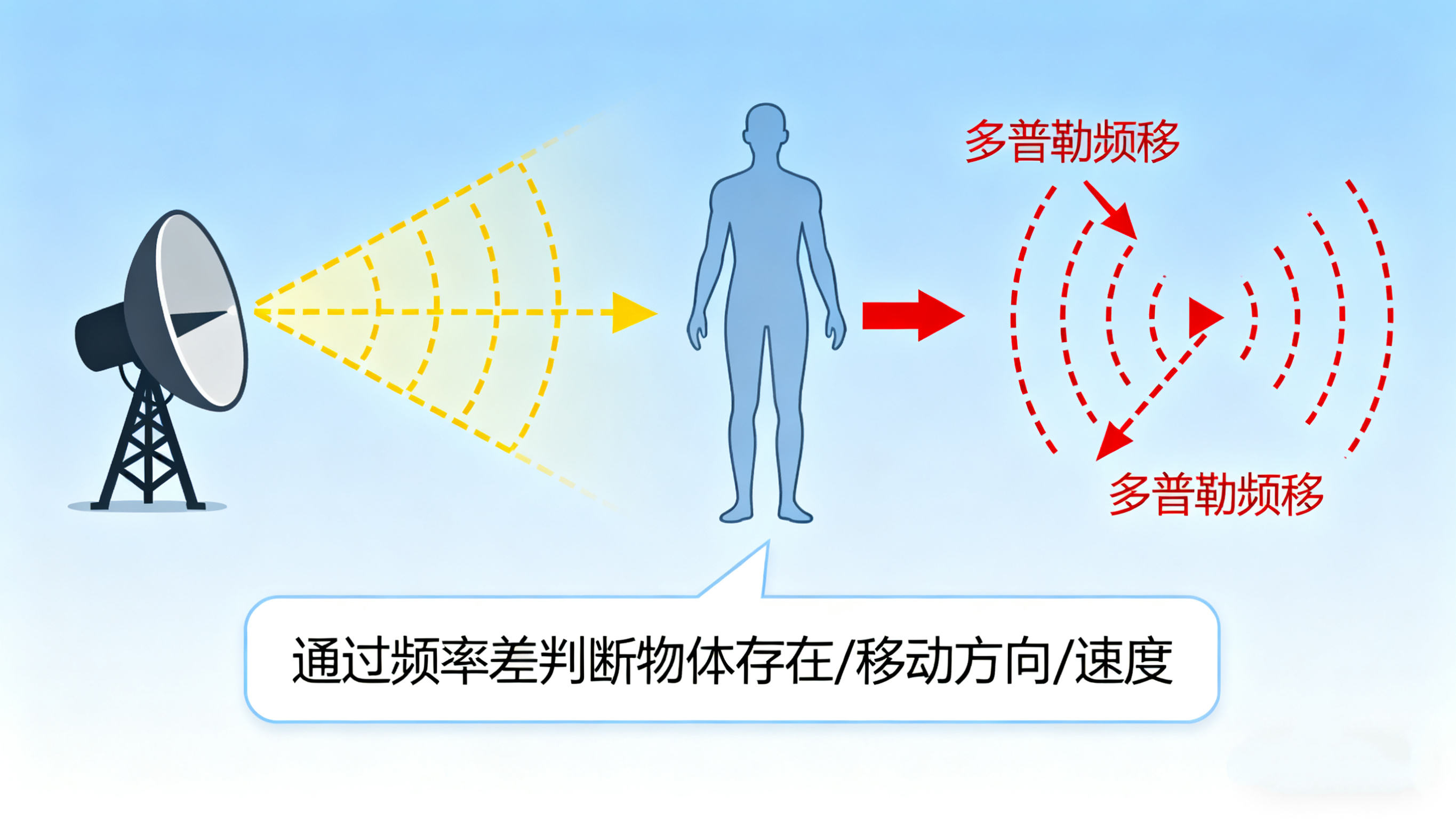
電能質(zhì)量在線監(jiān)測裝置數(shù)據(jù)存儲在 裝置內(nèi)置存儲 和 外接存儲設(shè)備 時,需重點關(guān)注 介質(zhì)可靠性、數(shù)據(jù)安全、環(huán)境適配、運維管理 四大核心維度,避免因存儲問題導(dǎo)致數(shù)據(jù)丟失、監(jiān)測中斷或合規(guī)風(fēng)險。以下是分場
2025-10-30 10:04:09180 :在高頻段(如28GHz、37GHz)接收微弱信號,提升覆蓋范圍與數(shù)據(jù)傳輸穩(wěn)定性。衛(wèi)星通信:處理極低功率的衛(wèi)星信號,確保地面站可靠接收與解碼。Wi-Fi與藍(lán)牙設(shè)備:增強信號接收能力,改善室內(nèi)或復(fù)雜環(huán)境中
2025-10-30 09:43:57
電能質(zhì)量在線監(jiān)測裝置的數(shù)據(jù)在云端的加密過程覆蓋 傳輸、存儲、密鑰管理 全鏈條,結(jié)合行業(yè)標(biāo)準(zhǔn)與前沿技術(shù)構(gòu)建多層次防護(hù)體系,具體實現(xiàn)方式如下: 一、傳輸加密:端到端防護(hù)防止數(shù)據(jù)竊取 基礎(chǔ)加密協(xié)議 數(shù)據(jù)從
2025-10-30 09:42:52206 質(zhì)量和覆蓋范圍。AMFW-7F-17702200-120-A100 可適用于各種移動通信、衛(wèi)星通信等場景。雷達(dá)系統(tǒng):雷達(dá)系統(tǒng)需要高靈敏度的接收機來捕捉微弱的目標(biāo)信號。射頻放大器能夠放大接收到的信號,提高
2025-10-30 09:29:56
具體方法和步驟
UART模塊依照UART協(xié)議標(biāo)準(zhǔn)的異步方式發(fā)送和接收數(shù)據(jù),每個UART模塊有TX和RX兩根數(shù)據(jù)線,TX為輸出,RX為輸入。使用TX數(shù)據(jù)線串行發(fā)送數(shù)據(jù),使用RX數(shù)據(jù)線串行接收數(shù)據(jù)
2025-10-29 07:37:33
網(wǎng)絡(luò)延遲對電能質(zhì)量在線監(jiān)測裝置實時性和完整性的影響,本質(zhì)是 破壞 “數(shù)據(jù)傳輸?shù)臅r序性” 與 “數(shù)據(jù)接收的完整性” —— 裝置采集的電流、電壓、諧波等數(shù)據(jù)(尤其是暫態(tài)事件波形)需通過網(wǎng)絡(luò)實時上傳至后臺
2025-10-23 11:59:16624 。下面分享我所接觸的導(dǎo)波雷達(dá)液位計的一些知識,為大家提供實用的設(shè)備認(rèn)知與參考。 在電子應(yīng)用方面,導(dǎo)波雷達(dá)液位計的電子系統(tǒng)承擔(dān)著信號發(fā)射、接收、處理及輸出的關(guān)鍵職能,在復(fù)雜工況下電子系統(tǒng)可通過調(diào)節(jié)微波信號頻率
2025-10-15 17:16:20431 遠(yuǎn)程校準(zhǔn)電能質(zhì)量在線監(jiān)測裝置時,保證數(shù)據(jù)傳輸完整性的核心是建立 “ 預(yù)處理防錯→實時校驗防篡改→丟包重傳補缺失→全量驗證閉環(huán) ” 的全流程機制,通過技術(shù)手段確保數(shù)據(jù)在傳輸中不被篡改、不丟失、不重
2025-10-11 16:47:24621 
RTT串口DMA接收數(shù)據(jù),超過緩沖區(qū)后為什么會吞掉一個數(shù)據(jù)包呢,不能每次處理完后清除緩沖區(qū)數(shù)據(jù)嗎,感覺接收的數(shù)據(jù)是累計的,累計滿之后會重新覆蓋,在最后一個包接收時會丟包。可以理解為數(shù)據(jù)接收過程會溢出
2025-09-29 07:50:54
在電能質(zhì)量監(jiān)測中,區(qū)分 “電壓暫降” 是電網(wǎng)真實問題還是監(jiān)測裝置誤判,需圍繞 **“電網(wǎng)事件的關(guān)聯(lián)性”“多源數(shù)據(jù)的一致性”“裝置自身的可靠性”** 三大核心維度展開,通過 “交叉驗證 + 特征分析
2025-09-23 10:52:14412 制定電能質(zhì)量在線監(jiān)測裝置(以下簡稱 “監(jiān)測裝置”)的數(shù)據(jù)校驗標(biāo)準(zhǔn),需以 確保數(shù)據(jù)準(zhǔn)確性、可靠性、一致性 為核心目標(biāo),結(jié)合國際 / 國內(nèi)通用規(guī)范、實際應(yīng)用場景(如工業(yè)、民用、電網(wǎng)側(cè))及監(jiān)測裝置的技術(shù)
2025-09-18 11:40:07609 
收集電能質(zhì)量在線監(jiān)測裝置的運行數(shù)據(jù),需遵循 “ 明確目標(biāo)→準(zhǔn)備工具→選擇采集方式→驗證數(shù)據(jù)完整性 ” 的邏輯流程,確保數(shù)據(jù)覆蓋監(jiān)測需求、具備可靠性和可分析性。以下是具體操作步驟、核心方法及注意事項
2025-09-18 10:46:21379 
利用運行數(shù)據(jù)趨勢分析驗證電能質(zhì)量在線監(jiān)測裝置準(zhǔn)確性,核心邏輯是 通過長期采集的電網(wǎng)運行數(shù)據(jù),判斷其趨勢是否符合電網(wǎng)實際規(guī)律、是否具備穩(wěn)定性與一致性 —— 若裝置準(zhǔn)確,其輸出的數(shù)據(jù)趨勢應(yīng)與電網(wǎng)工況(如
2025-09-18 10:33:40386 
在裝置數(shù)據(jù)(如工業(yè)設(shè)備傳感器數(shù)據(jù)、電子裝置運行參數(shù)、化工裝置工況數(shù)據(jù)等)的異常檢測中,AI 算法的選擇需結(jié)合數(shù)據(jù)特點(如 時序性、維度、標(biāo)注情況 )、檢測目標(biāo)(如實時性、精度、可解釋性)及部署環(huán)境
2025-09-18 09:27:57553 
的灑落障礙物相較于3D毫米波有多大提升? 先說結(jié)論,4D雷達(dá)相比傳統(tǒng)那種只能看平面的雷達(dá),最大的區(qū)別不是單純多一項數(shù)據(jù),而是能“看得更立體、更靠譜”。雷達(dá)對自動駕駛來說,就像人的耳朵與觸覺。它聽到(接收)回波,算出距離和速度,再
2025-09-15 09:13:021360 
利用ttl轉(zhuǎn)Usb ,利用電腦上的串口調(diào)試助手發(fā)送或者接收數(shù)據(jù),接收到的是亂碼,將板子上的rx,tx短接,可以正常收發(fā)
2025-09-15 06:09:59
#define LWIP_DEMO_RX_BUFSIZE2048
uint8_t g_lwip_demo_recvbuf[LWIP_DEMO_RX_BUFSIZE];
為什么我的tcp 數(shù)據(jù)接收超過了1024就分段接收了
2025-09-12 08:06:54
陣列式雷達(dá)流量監(jiān)測站是一種利用陣列雷達(dá)技術(shù)進(jìn)行非接觸式流量監(jiān)測的設(shè)備,廣泛應(yīng)用于水文監(jiān)測、城市排水、智慧水務(wù)、環(huán)境監(jiān)測等領(lǐng)域。它通過發(fā)射和接收電磁波,測量河流、渠道、管道、明渠等場景中的水面高度
2025-09-11 16:31:171218 
最近在研究Canopen協(xié)議,在f407的板子上移植了canfestival協(xié)議棧
移植成功后遇到一些問題,總線上我在沒有發(fā)數(shù)據(jù)的情況下還是可以進(jìn)入can接收中斷,我不清為什么會進(jìn)入中斷,后來我自己
2025-09-11 07:46:52
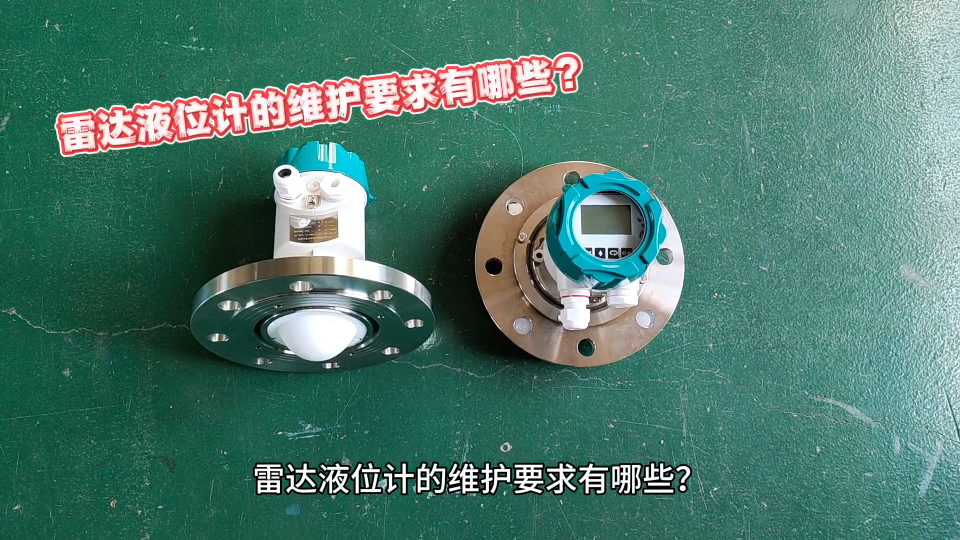
雷達(dá)液位計的基本工作原理是發(fā)射—反射—接收。 雷達(dá)傳感器的天線以波束的形式發(fā)射電磁波信號,發(fā)射波在被測物料表面產(chǎn)生反射,反射回來的回波信號仍由天線接收。發(fā)射及反射波束中的每一點都采用超聲采樣的方法
2025-09-05 16:47:56612 利用 AI 算法進(jìn)行裝置數(shù)據(jù)異常檢測,需結(jié)合工業(yè)裝置的數(shù)據(jù)特性(如實時性、多源性、強時序性、噪聲干擾)和業(yè)務(wù)需求(如故障預(yù)警、安全合規(guī)、工藝優(yōu)化),通過 “數(shù)據(jù)預(yù)處理 - 算法選型 - 模型部署
2025-09-05 15:27:001418 
電能質(zhì)量在線監(jiān)測裝置的數(shù)據(jù)驗證是確保監(jiān)測數(shù)據(jù) 真實、可靠、合規(guī) 的核心環(huán)節(jié),需遵循 “先基礎(chǔ)檢查、再核心比對、后長期驗證” 的邏輯,結(jié)合國家標(biāo)準(zhǔn)(如 GB/T 14549、GB/T 30137 等
2025-09-03 17:50:34608 
自動駕駛汽車上,這些雷達(dá)又有什么作用? 它們各自怎么工作的? 超聲波雷達(dá)發(fā)射的是人耳聽不到的高頻聲波(常見能見度的工作頻率大約在幾十千赫茲),當(dāng)聲波遇到障礙物后會被反射,傳感器通過測量發(fā)射到接收到回波的時間差來
2025-09-03 09:26:411419 
準(zhǔn)備一臺微機消諧裝置和配合完成測試的電腦程序,把線路和工作電源準(zhǔn)備連接好,通訊有正和負(fù),然后找到測試電腦里的程序,點擊發(fā)送,看到上面接收區(qū)會顯示一串?dāng)?shù)字,證明信號接收是沒問題的,顯示屏亮起,如果電壓
2025-09-01 08:44:31
景無線通訊:作為驅(qū)動放大器,提高通信基站、中繼器等設(shè)備的數(shù)據(jù)傳輸距離與質(zhì)量。衛(wèi)星通信:在C 波段 VSAT 系統(tǒng)中實現(xiàn)高頻信號放大,支持寬帶數(shù)據(jù)傳輸。機載雷達(dá):為雷達(dá)發(fā)射機提供高功率、高效率的射頻信號,增強探測能力。無線電設(shè)備:用于高頻無線通訊收發(fā)器,實現(xiàn)信號調(diào)制與解調(diào)的關(guān)鍵功能。
2025-08-25 10:06:43
基站測試、信號模擬及抗干擾研究,驗證高頻信號傳輸質(zhì)量。l 提供穩(wěn)定的噪聲參考源,優(yōu)化信號調(diào)制與解調(diào)性能。機載雷達(dá):l 作為噪聲注入工具,測試雷達(dá)接收器的抗噪聲性能。l 提高目標(biāo)檢測性能,尤其在復(fù)雜電磁
2025-08-22 09:12:00
存在性(即人在狀態(tài))+距離。技術(shù)實現(xiàn):24G毫米波雷達(dá)模塊通過發(fā)射24GHz高頻電磁波并接收反射信號,利用FMCW調(diào)頻連續(xù)波技術(shù)解析信號頻率差,實現(xiàn)人體靜止、微動
2025-08-19 12:01:161190 
節(jié)能裝置運行數(shù)據(jù)的實時監(jiān)控與分析,部分企業(yè)難以掌握裝置的節(jié)能效果、運行狀態(tài)及潛在故障,導(dǎo)致節(jié)能效率未達(dá)預(yù)期,甚至因裝置異常影響電機正常運行。因此,實現(xiàn)電機節(jié)能裝置數(shù)據(jù)的實時采集與上傳,對提升節(jié)能管理水平、保障
2025-08-18 17:12:09626 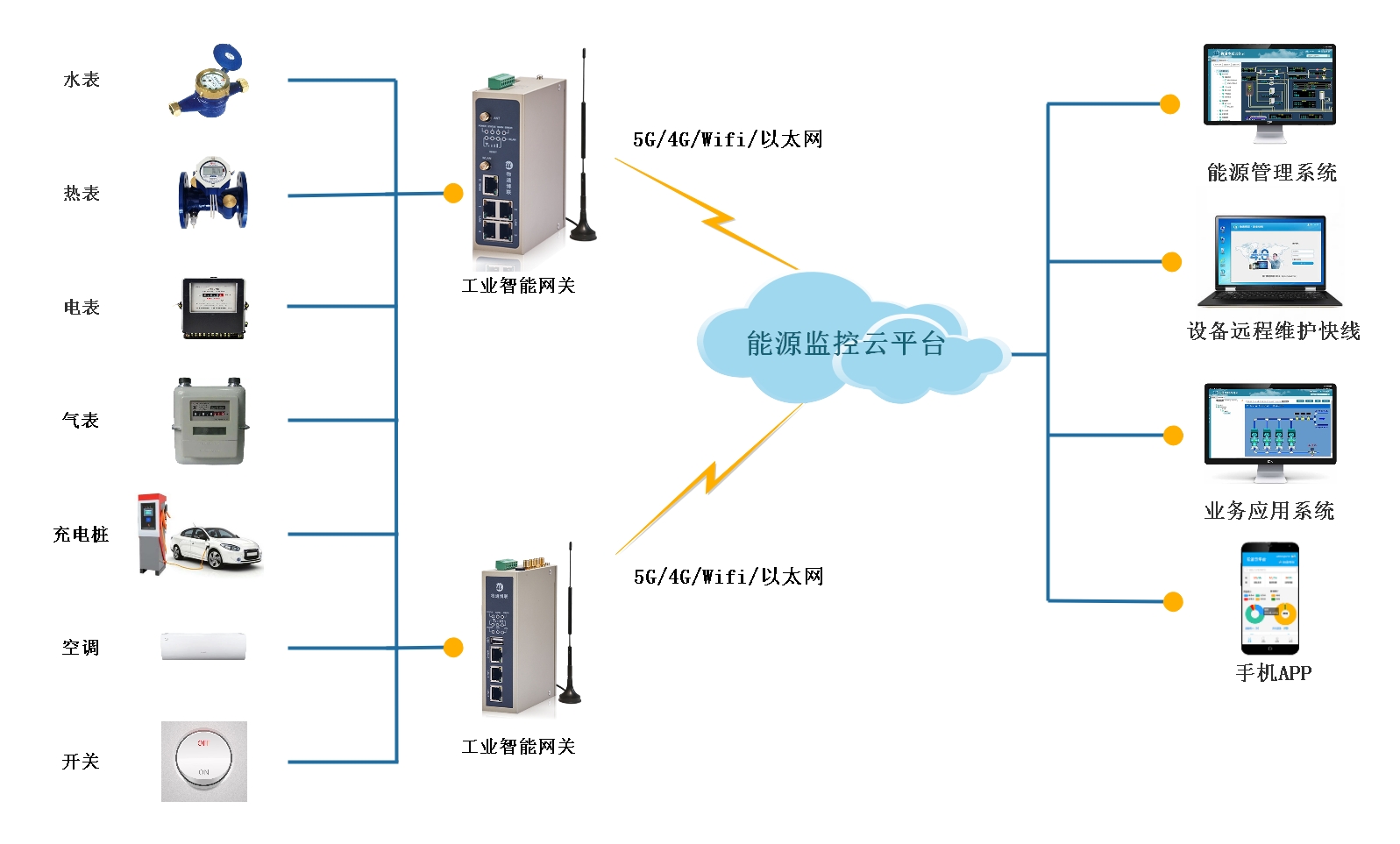
我使用帶有 freeRTOS 的 nuvoton M453 mcu,一切都工作正常,除了 UART 在中斷時沒有接收數(shù)據(jù)意味著中斷沒有觸發(fā),但我在沒有 RTOS 代碼的情況下也是如此,然后 UART
2025-08-15 06:44:51
采用SoC進(jìn)行距離檢測及電機驅(qū)動
重難點在于接收雷達(dá)波探測器的數(shù)據(jù)包,并對數(shù)據(jù)包進(jìn)行解析,通過運算獲得距離數(shù)據(jù)。
本次使用的毫米波雷達(dá)模塊是:海凌科LD2450
數(shù)據(jù)包協(xié)議如下。
獲得X軸和Y軸
2025-08-13 01:20:24
雷達(dá)物位計有脈沖法(PULS)和連續(xù)調(diào)頻法(FMCW)兩種。 1、連續(xù)調(diào)頻dao(FMCW)技術(shù) 連續(xù)調(diào)頻(FMCW)技術(shù)測量物位是將傳播時間轉(zhuǎn)換成頻差的方式,通過測量頻率來代替直接測量時差,來計算
2025-07-21 14:12:14271 帶技術(shù)應(yīng)用,主要用于5G通訊、衛(wèi)星通訊、機載雷達(dá)等高頻率場景。衰減范圍與步進(jìn)衰減范圍0-127dB,步進(jìn)1dB,能夠?qū)崿F(xiàn)高精密信號電平操控。例如,在接收機靈敏度檢測中,可精確模擬不同距離的信號衰減
2025-07-10 09:35:12
雷達(dá)物位計是借助電磁波技術(shù)進(jìn)行非接觸式液位測量的儀表,雷達(dá)物位計當(dāng)中的主要功能單元分為了信號發(fā)射和接收器、信號處理器、天線裝置以及信號顯示器等。雷達(dá)物位計具有非接觸式的操作特點,在測量的過程中不需要
2025-06-20 09:49:00397 系統(tǒng):適合于5G和未來6G通信的毫米波頻段,為高速度數(shù)據(jù)通訊提供保障。衛(wèi)星通訊:在衛(wèi)星通信系統(tǒng)中,低噪聲放大器是接收鏈路的關(guān)鍵器件,能夠放大微弱的下行信號,提高信號質(zhì)量。機載雷達(dá):應(yīng)用于雷達(dá)接收器前端
2025-06-19 09:14:18
,SiPM對于目前主流200線以內(nèi)的激光雷達(dá)更具優(yōu)勢,這是從產(chǎn)品定義的角度考慮。 ? 而從行業(yè)的趨勢來看,像禾賽、速騰聚創(chuàng)等頭部廠商聚焦數(shù)字化激光雷達(dá)的路線表明,SPAD正在取代SiPM成為激光雷達(dá)的接收端傳感器。 ? SiPM 、SPAD 有什么區(qū)別? ? 目前市面上的車載
2025-06-13 00:59:005083 IF/RF接收器是射頻和中頻信號處理中的關(guān)鍵組件,廣泛應(yīng)用于通信基礎(chǔ)設(shè)施、雷達(dá)、測試測量等領(lǐng)域。以下是關(guān)于IF/RF接收器的技術(shù)參數(shù)和應(yīng)用場景的詳細(xì)介紹:### 技術(shù)參數(shù)1. **輸入帶寬
2025-06-11 14:46:05
微波雷達(dá)水位在線監(jiān)測裝置以電磁波技術(shù)為核心,通過非接觸式、高精度、全天候的測量能力,重新定義了水位監(jiān)測的技術(shù)標(biāo)準(zhǔn)。隨著物聯(lián)網(wǎng)與人工智能技術(shù)的融合,該設(shè)備將進(jìn)一步向智能化、集成化方向發(fā)展,為水資源管理、災(zāi)害防治及工業(yè)自動化提供更高效的技術(shù)解決方案。
2025-06-09 17:09:04553 
電子發(fā)燒友網(wǎng)報道(文/梁浩斌)在激光雷達(dá)行業(yè)的早期,由于需要大量的信號處理,包括控制電機、脈沖生成、激光發(fā)射、接收器控制、濾波、點云生成等,以及考慮到產(chǎn)量以及成本的限制,普遍是基于可編程的FPGA
2025-06-07 01:11:007870 
使用的是AN65974(cyfxslfifosync)。streamer使用BeginDataXfer(), WaitForXfer() 和 FinishDataXfer()的方法異步接收數(shù)據(jù)
2025-05-19 06:33:53
在自動駕駛系統(tǒng)中,激光雷達(dá)起到了至關(guān)重要的作用,它是實現(xiàn)高度自動駕駛的關(guān)鍵傳感器之一。激光雷達(dá)通過發(fā)射和接收多束脈沖信號,通過測量ToF(Time of Flight,飛行時間),從而獲取每一個發(fā)射
2025-05-15 11:15:061130 
? 1.什么是激光雷達(dá) 激光雷達(dá)LiDAR的全稱為Light Detection and Ranging 激光探測和測距。 激光雷達(dá)的工作原理:對紅外光束Light Pluses發(fā)射、反射和接收
2025-04-25 11:48:582363 
BGT24LTR11N16是用于信號生成和接收的硅鍺雷達(dá)MMIC,工作范圍在24.00至24.25 GHz的24.0GHz ISM頻段。它基于 24GHz 基本壓控振蕩器(VCO)。該器件在設(shè)計時
2025-04-21 16:49:221125 
求介電常數(shù)。 介電常數(shù)對雷達(dá)電磁波的影響體現(xiàn)在兩個方面,一是影響介質(zhì)表面對電磁波的吸收(反射)率,二是電磁波在穿過介質(zhì)時波長(頻率)會發(fā)生改變。 從大多數(shù)純粹的發(fā)射→反射→接收的工作過程來看,確實不需要介電常數(shù)。
2025-04-16 15:21:28597 近年來,航空機載裝備產(chǎn)業(yè)作為國家戰(zhàn)略性新興產(chǎn)業(yè)的重要組成部分,迎來了前所未有的發(fā)展機遇。
2025-04-15 17:39:05976 SCJ-LL21雷達(dá)流量計是一款集成雷達(dá)測速,雷達(dá)測量水位的一體化測流產(chǎn)品,利用電磁波的多普勒效應(yīng)測量水體流速,利用調(diào)頻連續(xù)波(FMCW)技術(shù)測量水位;內(nèi)部集成信號處理器,專有的流速計算算法,可以
2025-04-10 11:13:04664 
近日,華力創(chuàng)通自主研發(fā)的機載北斗定位追蹤設(shè)備正式獲得中國民航局頒發(fā)的適航認(rèn)證證書,標(biāo)志著該產(chǎn)品已經(jīng)滿足了民用航空器對機載設(shè)備的適航要求,為華力創(chuàng)通在民用航空領(lǐng)域的進(jìn)一步拓展奠定了堅實的基礎(chǔ)。
2025-04-01 10:03:231032 隨著自動駕駛技術(shù)的普及,汽車雷達(dá)已成為高級駕駛輔助系統(tǒng)(ADAS)和自動駕駛系統(tǒng)的核心感知組件。雷達(dá)模塊需要精確的時鐘信號來確保發(fā)射/接收時序的準(zhǔn)確性、信號處理的同步性以及低功耗運行。這些系統(tǒng)對時
2025-03-25 11:52:12641 
一、方案簡介感算商城聯(lián)合知名方案公司推出超高精度和穩(wěn)定性的雷達(dá)液位計方案,雷達(dá)液位計采用非接觸式微波探測技術(shù),通過發(fā)射高頻電磁波,經(jīng)水面反射后接收回波信號,利用飛行時間差(ToF)原理計算水位高度
2025-03-21 11:29:51
以及一些顆粒物進(jìn)行非接觸的連續(xù)探測,其探測技術(shù)十分先進(jìn)。 雷達(dá)物位計主要以一種雷達(dá)的方式進(jìn)行探測,向被測的目標(biāo)發(fā)射微波,將發(fā)射的微波返回到接收,再與發(fā)射波進(jìn)行比較,從而計算出它們之間的距離。那么雷達(dá)物位計在
2025-03-20 15:50:31503 計算出流量。以下是該設(shè)備工作原理的詳細(xì)介紹:一、系統(tǒng)構(gòu)成纜道雷達(dá)波測流設(shè)備主要由纜道系統(tǒng)、雷達(dá)波發(fā)射接收裝置、數(shù)據(jù)處理與控制系統(tǒng)等部分組成。纜道系統(tǒng):由支架、鋼索
2025-03-18 16:33:47879 
一、方案簡介
感算商城聯(lián)合知名方案公司推出超高精度和穩(wěn)定性的雷達(dá)液位計方案,雷達(dá)液位計采用非接觸式微波探測技術(shù),通過發(fā)射高頻電磁波,經(jīng)水面反射后接收回波信號,利用飛行時間差(ToF)原理計算水位高度
2025-03-17 15:14:25
激光雷達(dá)是一種通過發(fā)射激光束并接收反射光束來測量物體距離和速度的傳感器。它能夠生成周圍環(huán)境的精確三維地圖,為自動駕駛車輛提供關(guān)鍵的感知信息。激光雷達(dá)的主要組成部分包括
2025-03-10 10:16:141483 
在當(dāng)今快速發(fā)展的無人機技術(shù)領(lǐng)域,測繪巡檢機載掛載已成為實現(xiàn)高效、精確地理信息采集的關(guān)鍵工具。隨著城市化進(jìn)程的加快和基礎(chǔ)設(shè)施的日益復(fù)雜,對于高精度、高穩(wěn)定性的測繪需求日益增長,這使得IMU(慣性測量
2025-03-05 17:38:55796 
世界上的微波(雷達(dá))物位計通有脈沖法(PULS)和連續(xù)調(diào)頻法(FMCW)兩種。 連續(xù)調(diào)頻(FMCW)技術(shù) 連續(xù)調(diào)頻(FMCW)技術(shù)測量物位是將傳播時間轉(zhuǎn)換成頻差的方式,通過測量頻率來代替直接測量時差
2025-03-04 15:07:09578 ,具備HH、HV、VH、VV全極化測量能力。基于梯度最小熵的自聚焦算法配合非RTK級GPS與慣性測量單元(IMU)傳感器數(shù)據(jù),即可利用寬波束天線獲取高質(zhì)量成像。這里我們把設(shè)計原理簡單概述一下:雷達(dá)設(shè)計無人機框架尺寸本項目的核心設(shè)計目標(biāo)在于實
2025-02-27 15:56:05 62
62 “ ?繼續(xù) SAR 無人機項目,開始電子系統(tǒng)以及天線的設(shè)計。 ” FPGA 數(shù)字部分框圖 面對雷達(dá)系統(tǒng)嚴(yán)苛的時序控制與海量數(shù)據(jù)處理需求,傳統(tǒng)微控制器方案已無法滿足性能要求,必須采用FPGA架構(gòu)。本
2025-02-25 11:16:171983 
“ ?分享一個非常酷的項目,來自于 Henrik 的 Blog。將 SAR 合成孔徑雷達(dá)裝在無人機上,作者詳細(xì)記錄了思路、選型、制造和測試的過程,非常值得學(xué)習(xí)。 ” ? 簡介 在業(yè)余無線電領(lǐng)域,我
2025-02-24 11:52:242498 
輸電線路激光雷達(dá)點云監(jiān)測裝置采用激光雷達(dá)與高清攝像機一體化融合方式,可以實現(xiàn)輸電線路防外破(樹障、施工機械等)的全方位、實時監(jiān)測。激光雷達(dá)提供高精度的三維模型和測距數(shù)據(jù)支持,而AI圖像監(jiān)控則提供直觀的圖像信息和智能化的識別預(yù)警。兩者相輔相成,共同構(gòu)成了一個高效、智能的防外破監(jiān)測預(yù)警體系。
2025-02-21 10:35:09933 ?一般來說,雷達(dá)物位計的頻率越高,則波長越短,且發(fā)射的信號越強、越精確,同時,對于水汽的存在和掛料程度也越加敏感,因此高頻雷達(dá)物位計通常只用于測量固體料位。相反,如果頻率越低,則波長越長,且更容易
2025-02-14 10:35:311074 雷達(dá)物位計是依據(jù)時域反射原理(TDR)為基礎(chǔ)的雷達(dá)液位計,雷達(dá)液位計的電磁脈沖以光速沿鋼纜或探棒傳播,當(dāng)遇到被測介質(zhì)表面時,雷達(dá)液位計的部分脈沖被反射形成回波并沿相同路徑返回到脈沖發(fā)射裝置,發(fā)射裝置
2025-02-14 10:34:02630 [list]
[*]專家您好,在這里向您咨詢一些問題。以下是我的驅(qū)動2543的51單片機程序,分開運行采集數(shù)據(jù)的準(zhǔn)確性和穩(wěn)定性都很好,但是數(shù)據(jù)經(jīng)由CAN總線發(fā)送,同時處理器也在接收數(shù)據(jù)時采集的數(shù)據(jù)
2025-02-13 06:38:05
裝置,發(fā)射裝置與被測介質(zhì)表面的距離同脈沖在其間的傳播時間成正比,經(jīng)計算得出液位高度。 在一些特殊工況導(dǎo)波雷達(dá)有明顯的優(yōu)勢如: 罐內(nèi)有攪拌,介質(zhì)波動大,這樣的工況用底部固定的導(dǎo)波雷達(dá)測量值要比變通雷達(dá)穩(wěn)定; 小罐體內(nèi)的
2025-02-06 15:42:36659 開關(guān)電源。應(yīng)用領(lǐng)域EV10AS940的高性能使其應(yīng)用于多個領(lǐng)域,包括但不限于:衛(wèi)星通信:用作發(fā)射裝置中的高速數(shù)據(jù)采集和處理。光纖通信:在發(fā)射裝置中實現(xiàn)高速信號轉(zhuǎn)換。機載雷達(dá)(SAR):在發(fā)射裝置中提供精確
2025-01-24 08:44:23
我看到TI的ADC08D1020 有同步時鐘DCLK2,想咨詢一下:如果使用此時鐘去接收數(shù)據(jù),其接收性能和使用DCLK相比如何?
TI是否推薦使用此時鐘去接收數(shù)據(jù)?
如果使用ADC08D1020 實現(xiàn)單通道2Gsps的采樣,是不是只能使用DCLK?
非常感謝!
2025-01-21 10:08:03
雷達(dá)物位計在行業(yè)內(nèi)的應(yīng)用日益廣泛,根據(jù)一些具體情況判斷雷達(dá)物位計是否正常工作,我們介紹如何判斷出雷達(dá)物位計是否正常工作,如以下內(nèi)容: 1、首先檢查雷達(dá)物位計在現(xiàn)場的安裝使用情況、安裝是否合理、是否
2025-01-20 14:16:35732 ,保障礦工的生命安全和企業(yè)的穩(wěn)定發(fā)展。 機載甲烷斷電儀的重要性及系統(tǒng)組成 機載甲烷斷電儀作為井下安全避險“六大系統(tǒng)”之一的監(jiān)測監(jiān)控系統(tǒng),直接關(guān)系到礦工的生命安全和企業(yè)的穩(wěn)定發(fā)展。該系統(tǒng)支持獨立裝置本地控制、兼容現(xiàn)有安全
2025-01-16 09:28:02868 雷達(dá)水位計是一種基于雷達(dá)技術(shù)的水位測量設(shè)備,它通過發(fā)射雷達(dá)波并接收水面反射回來的信號,計算水位的變化。與傳統(tǒng)的浮標(biāo)式或壓力式水位計相比,雷達(dá)水位計具有非接觸式、高精度和長時間穩(wěn)定性的優(yōu)勢。
2025-01-15 08:49:251039 
雷達(dá)物位計的基本工作原理是發(fā)射—反射—接收。 雷達(dá)傳感器的天線以波束的形式發(fā)射電磁波信號,發(fā)射波在被測物料表面產(chǎn)生反射,反射回來的回波信號仍由天線接收。發(fā)射及反射波束中的每一點都采用超聲采樣的方法
2025-01-14 17:26:15978 產(chǎn)品簡介 DX-WLX-1雷達(dá)水位計是利用電磁波探測目標(biāo)的電子設(shè)備,其主要作用是用來進(jìn)行水利監(jiān)測、污水處理和防洪預(yù)警等,雷達(dá)水位計廣泛應(yīng)用于江水、河水海水、水庫等水位監(jiān)測。全天候工作
2025-01-14 15:58:17
產(chǎn)品簡介DX-WLX-2雷達(dá)水位計是利用電磁波探測目標(biāo)的電子設(shè)備,其主要作用是用來進(jìn)行水利監(jiān)測、污水處理和防洪預(yù)警等,雷達(dá)水位計廣泛應(yīng)用于江水、河水海水、水庫等水位監(jiān)測。全天候工作,適用于在野外或者
2025-01-14 15:54:35
。DX-LLX-1M移動式雷達(dá)波測流系統(tǒng)通過架設(shè)簡易纜道,在纜道上懸掛雷達(dá)運行車和雷達(dá)流速儀,通過安裝的雷達(dá)水位計或者其他水位測量裝置結(jié)合大斷面數(shù)據(jù)和測流垂線參數(shù)
2025-01-14 14:40:51
的發(fā)射、反射和接收過程,通過比較發(fā)射信號與接收信號,獲取目標(biāo)的詳細(xì)信息。 毫米波雷達(dá)原理 毫米波雷達(dá)(Millimeter Wave Radar) 利用毫米波頻段的電磁波進(jìn)行探測。其工作原理是發(fā)射電磁波信號,當(dāng)信號遇到障礙物時發(fā)生反射,雷達(dá)系統(tǒng)接收反射信號,
2025-01-13 18:27:493586 在當(dāng)今快速發(fā)展的無人機技術(shù)領(lǐng)域,測繪巡檢機載掛載已成為實現(xiàn)高效、精確地理信息采集的關(guān)鍵工具。隨著城市化進(jìn)程的加快和基礎(chǔ)設(shè)施的日益復(fù)雜,對于高精度、高穩(wěn)定性的測繪需求日益增長,這使得IMU(慣性測量
2025-01-10 11:15:00745 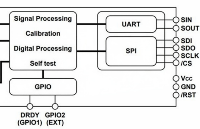
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論