 自動駕駛激光雷達:原理、類型與應用梳理
自動駕駛激光雷達:原理、類型與應用梳理

1.什么是激光雷達
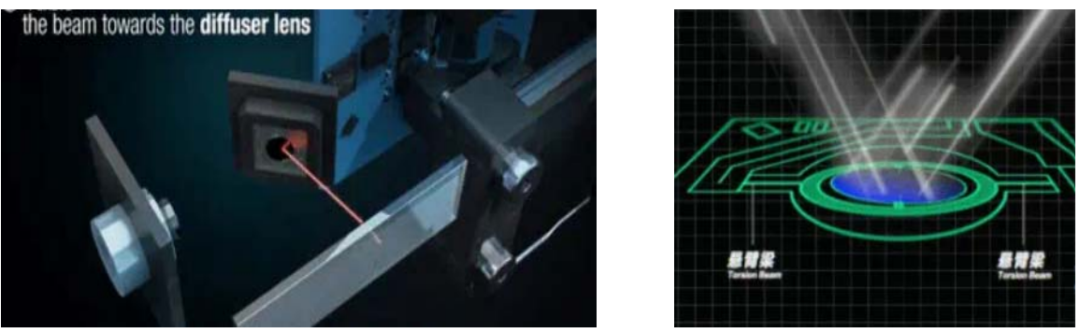
激光雷達LiDAR的全稱為Light Detection and Ranging 激光探測和測距。
激光雷達的工作原理:對紅外光束Light Pluses發射、反射和接收來探測物體。白天或黑夜下的物體與車之間的距離。甚至由于反射度的不同,車道線和路面也可以區分。光束無法探測到被遮擋的物體。
2.激光雷達的關鍵參數
點頻:每幀水平方向平均點數x垂直方向平均點數x幀率=(水平視場角/水平角分辨率)×(垂直視場角/垂直角分辨率)
掃描頻率:10Hz就代表每秒掃描10次(轉10圈)
視角(Field of View, FOV):FOV包括垂直視場角(VFOV)、水平視場角(HFOV)、對角線視場角(DFOV);通常,在沒有特殊說明時,我們默認的FOV一般都是水平視場角。
 ? ?
? ? 
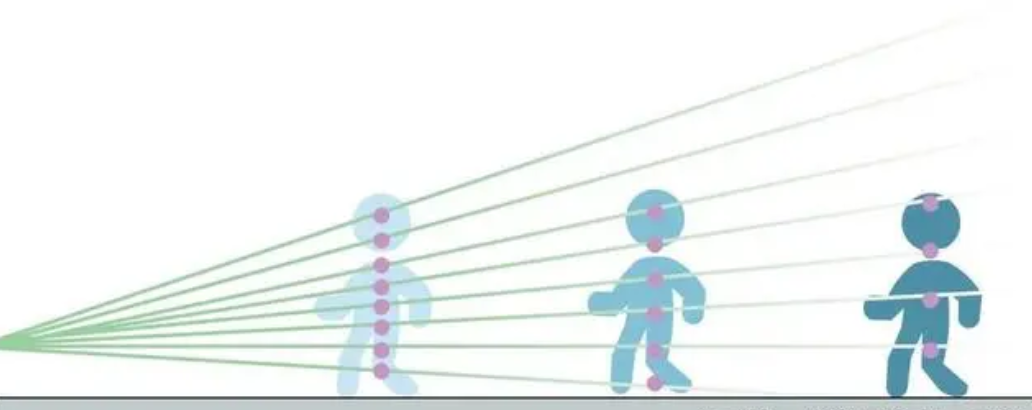
角分辨率:指的是相鄰兩個激光掃描點之間的角度間隔,一般以度(°)為單位。由于目前激光雷達有很多種掃描方式,每種方式在掃描點分布上的差異,導致掃描點并不絕對均勻,因此這里講的激光雷達角分辨率是一個等效平均的概念。直觀理解,角分辨率越小,單位空間角內分布的激光點數就越多,其對于物體的分辨能力就會越強。相同角分辨率下,對同一物體,距離越遠探測到的激光點數越少,如圖所示。
線數: 對于機械激光雷達來說, 一般多少線就需要多少個激光器。
反射率: 激光雷達返回值除了三維點坐標 (x, y, z)之外, 還有反射率和距離, 入射角度, 與物體表面反射率
波長: 常見的激光雷達波長為 905nm, 1550nm兩種, 1550nm 距離可見光波段更遠, 所以對人眼更安全, 波長更長穿透度更好,更有利于在雨霧天氣使用, (由于成本較高, 還未成為主流)。
探測距離:一般要求200米,以達到最遠剎車距離的要求
回波模式: 單回波和多回波, 激光雷達發出的激光點是有一定面積的, 有時可能會出現1個激光點發出后, 打在2個物體上(如同一束激光打在兩片樹葉上), 此時可以選擇是接受最后一次回波的值還是反射強度最強的回波的值。
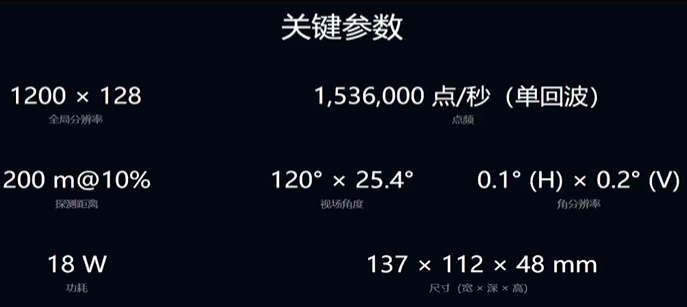
以禾賽128為例
1、10%反射率下最遠探測距離200米
2、視場角:120°x25.4°
3、角分辨率:0.1°(H)X0.2°(V)
4、功耗:18W
5、尺寸:137mmX112mmX47mm
 ? ?
? ? 
3.激光雷達種類
傳統機械掃描; AT128,有機械結構,體積比較大。
使用機械部件旋轉來改變發射角度,水平360度掃描
EE了激光器堆疊工藝復雜,體積過大,垂直線數受限,難以通過
MEMS(Micro‐Electro‐Mechanical System) 半固態激光雷達
MEMS在硅基芯片上集成了體積十分精巧的微振鏡,其核心結構是尺寸很小的懸臂梁——通過控制微小的鏡面平動和扭轉往復運動,將激光管反射到不同的角度完成掃描,而激光發生器本身固定不動。
優點:運動部件減少,體積小,成本相對較低。
缺點:MEMS可轉角受限,限制掃描視野,存在成像拼接的問題
FLASH 泛光面陣式, 純固態激光雷達,
FLASH工作原理類似于攝像頭, 只不過攝像頭是被動接受光信息, 而FLASH是主動發射面激光并接受反射激光, Flash激光雷達的成像原理是發射大面積激光一次照亮整個場景,然后使用多個傳感器接收檢測和反射光。但最大的問題是這種工作模式需要非常高的激光功率。而在體積限制下,Flash激光雷達的功率密度不能很高。因此Flash激光雷達由于功率密度的限制,無法考慮三個參數:視場角、檢測距離和分辨率,即如果檢測距離較遠,則需要犧牲視場角或分辨率;如果需要高分辨率,則需要犧牲視場角或檢測距離。
OPA(Optical Phased Array) 光學相控陣,全固態激光雷達;
光學相控陣技術的原理是利用光源相干技術實現光線角度偏轉,從而達到掃描測距的目的。OPA激光雷達發射的是光,而光和電磁波一樣也表現出波的特性。波與波之間會產生干
涉現象,通過控制相控陣雷達平面陣列各個陣元的電流相位,利用相位差可以讓不同的位置的波源會產生干涉(類似的是兩圈水波
相互疊加后,有的方向會相互抵消,有的會相互增強),從而指向特定的方向,往復控制便得以實現掃描效果。
優點:OPA是純固態器件,無需要活動的機械結構,
缺點:激光雷達對激光調試、信號處理的運算力要求很高。
前沿性探索階段
4.自動駕駛感知傳感器
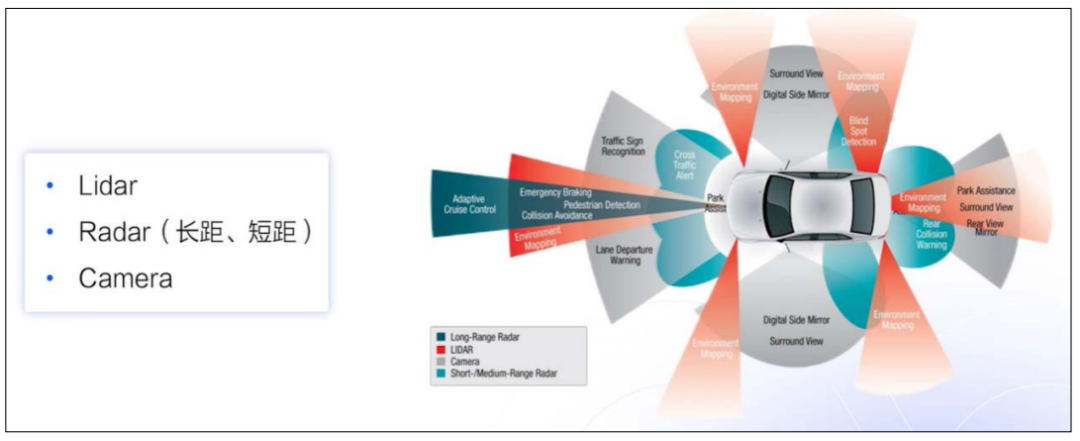
下圖是傳感器感知的視野圖,從圖中可以看到,傳感器的視野比人的視野更加寬廣深遠且盲區更小,基本能夠涵蓋車輛360度范圍。
感知主要的傳感器:Lidar、Radar(長距、短距)、Camera。
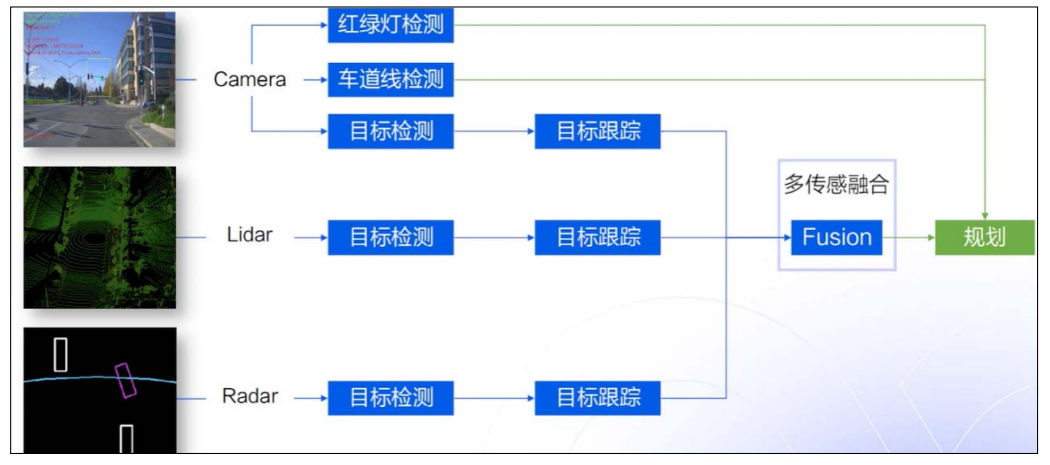
視覺傳感器一般用于障礙物、車道線、交通燈檢測、目標檢測和跟蹤功能。基本原理是首先獲取圖像并將圖片轉化為二維數據,然后通過深度學習方法做目標識別,再根據相機的內外參計算目標物體和主車的相對距離和相對速度。毫米波雷達主要用于目標檢測、換道輔助、自適應巡航控制、停車輔助等,激光雷達一般應用于障礙物檢測、定位等。

在智能駕駛領域,通常車輛會配置多種感知器,分別執行不同的任務,并進行感知融合。在感知融合中,會對所有目標進一步處理,得到更加準確的目標類別、距離、尺寸、速度等,感知完成紅綠燈檢測、車道線檢測目標融合之后,把感知信息發送給下游模塊。
5.激光雷達感知框架
以百度Apollo為例
感知框架中lidar、camera、radar、fusion 四部分內容定義在四個模塊中。Lidar 和 camera 每個模塊內部功能復雜,學習成
本較高。感知框架拆分后,模塊依賴關系清晰。Lidar 和 camera 的感知流程分為多個模塊,依賴關系呈線性狀態;radar
和 fusion 的功能在單個模塊內,功能如框圖所示。
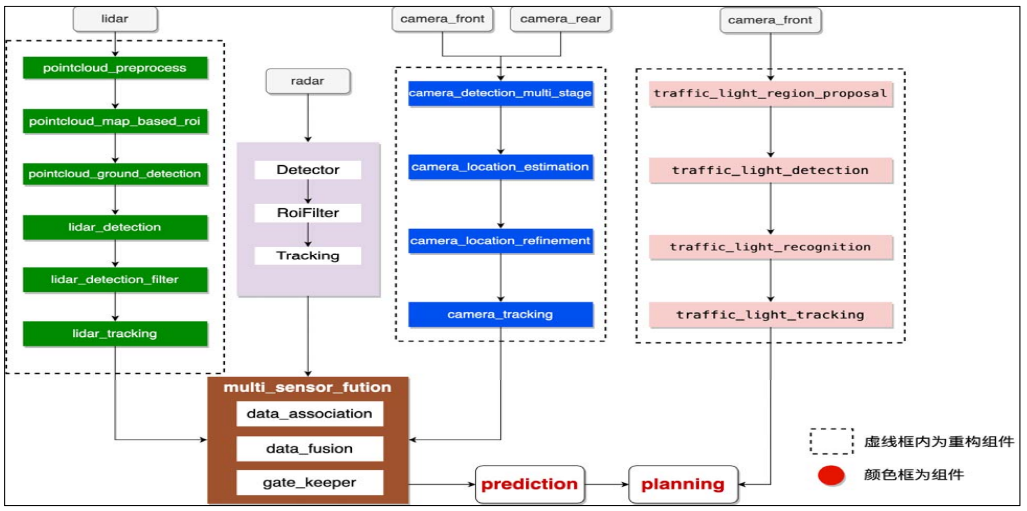
激光雷達檢測用于 3D 目標檢測,它的輸入是激光雷達點云,輸出為檢測到的物體的類型和坐標。
pointcloud_preprocess:點云預處理模塊對輸出的點云數據進行預處理。刪除超值點、太遠的點、掃描到自身車輛上的點、太高的點。
pointcloud_map_based_roi:過濾 ROI 之外的點云。感興趣區域 (ROI) 指定可行駛區域,包括從高精地圖檢索到的路面和路口。HDMap ROI 過濾器處理 ROI 外部的lidar點,去除背景物體,例如道路周圍的建筑物和樹木。剩下的就是ROI中的點云以供后續處理。給定HDMap,每個 LiDAR 點的隸屬關系指示它是在 ROI 內部還是外部。
pointcloud_ground_detection:點云地面檢測,檢測地面點,并保存所有非地面點的索引。
lidar_detection:基于點云進行3D物體檢測,并輸出檢測到的物體的位置、大小和方向。Apollo提供了4種激光雷達檢測模型:centerpoint、maskpillars、pointpillars、cnnseg。lidar_detection_filter:根據對象屬性、車道線、ROI 等過濾前景和背景對象。
lidar_tracking:跟蹤模塊用于跟蹤障礙物的運動軌跡,更新障礙物的運動狀態和幾何形狀,并分配跟蹤id。
multi_sensor_fusion :多傳感器融合模塊融合Lidar、Camera、Radar多個傳感器的輸出結果,使檢測結果更加可靠。該模塊采用后處理技術,采用的算法是概率融合
5.1 pointcloud_preprocess
點云預處理模塊對點云做過濾,刪除異常的、感知不需要的點云。
刪除空值,超限值點云;
刪除過遠(超過1000m)的點云;
刪除過高的點云;
點云轉化到主車自身坐標系,刪除掃描到主車身上的點云。
5.2 pointcloud_map_based_roi
點云基于地圖計算興趣區域(roi,region of interest),根據高精度地圖的road和junction邊界判斷點云是否在高精度地圖內,獲得
在高精地圖內的點的索引。
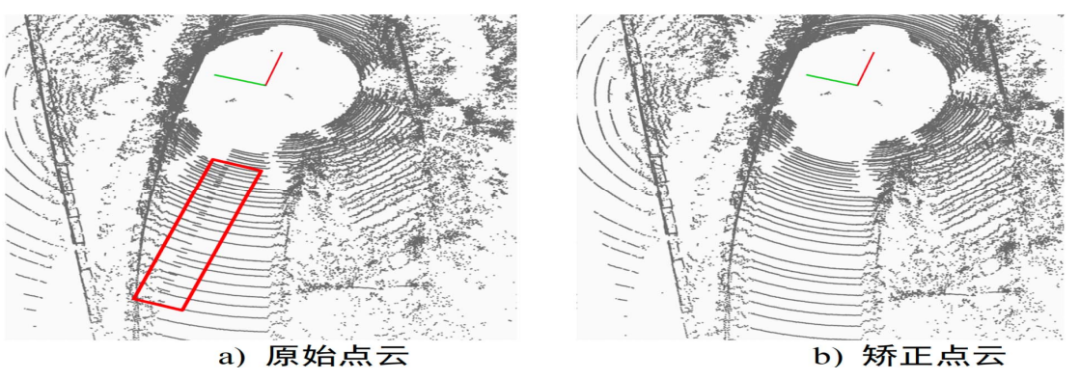
下圖是基于地圖roi過濾的效果圖。紅色的是roi內的點云,白色的是roi外的點云。
5.3 pointcloud_ground_detection
地面點檢測功能是檢測出地面點,獲得所有非地面點的索引,即non_ground_indices。
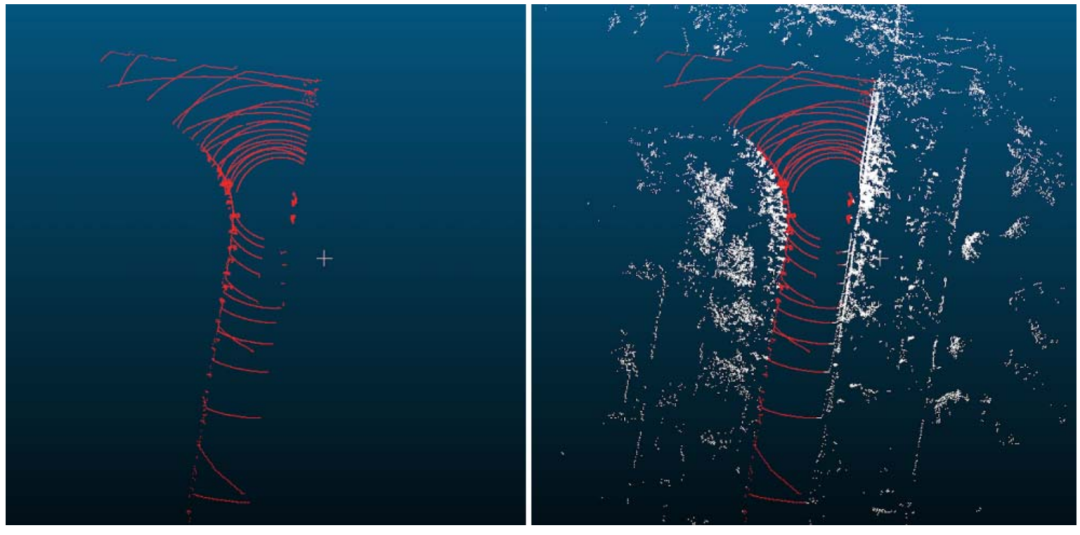
下圖是地面點云檢測的示例圖,紅色的點云是非地面點云,白色的是地面點云。分割出地面點云后,去除前景目標點云。然后用
剩余的非地面點云做聚類,檢測當前場景下的所有目標,保證自動駕駛的安全性。
5.4 lidar_detection
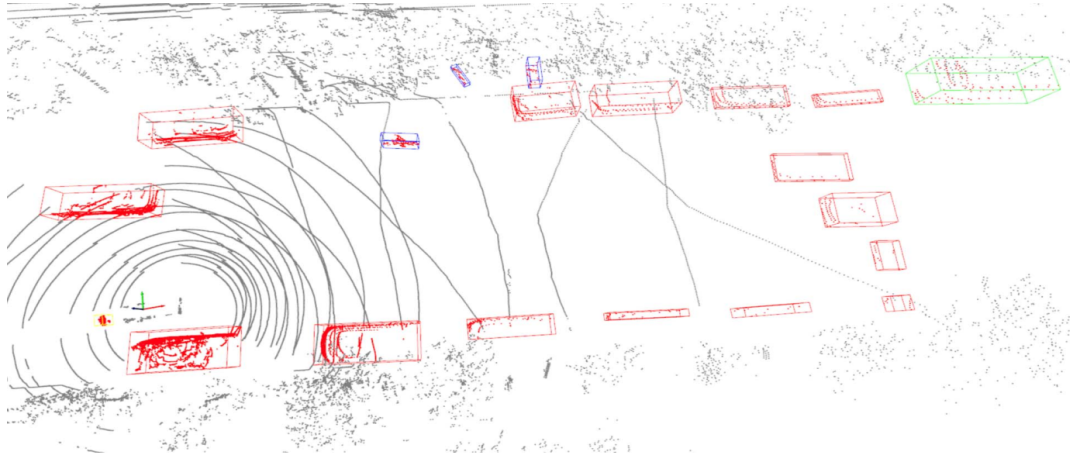
檢測模型完成目標檢測功能,獲得目標的如下結果:cx, cy, cz, length, width, height, heading, type
其中,(cx, cy, cz)是中心點,(length, width, height)是長寬高,heading是朝向,type是目標類別。示例如下
除了獲取目標,還根據目標的3d bounding box,得到每個目標的所有點云。
5.5 lidar_detection_filter
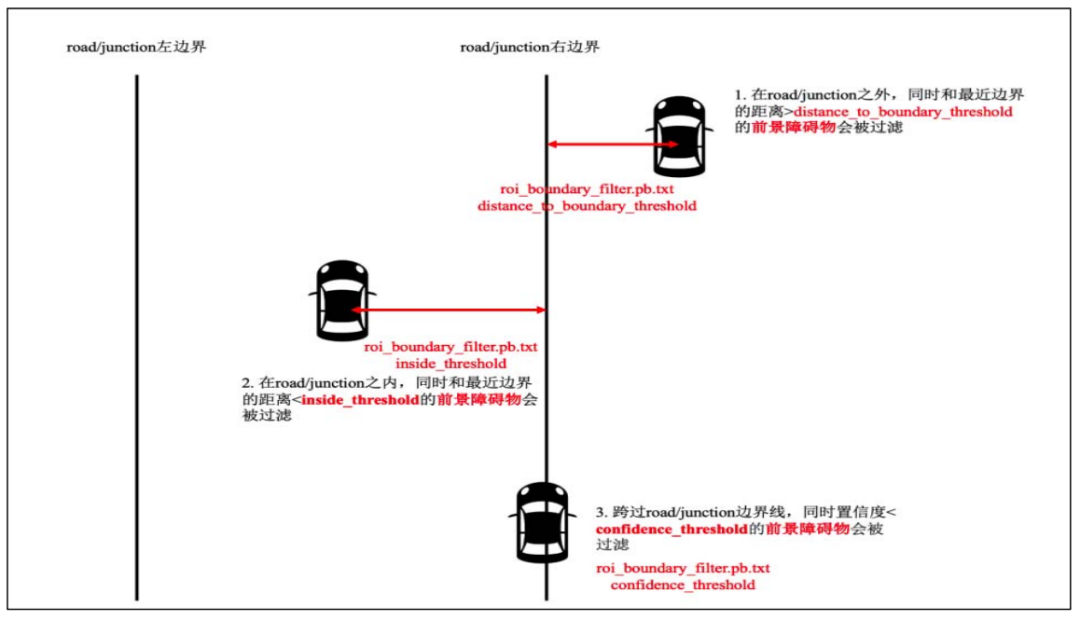
完成激光雷達目標檢測后,對檢測目標做過濾。object_filter_bank可以同時使用多個過濾器,針對roi_boundary_filter做介紹,
roi_boundary_filter只用來處理前景目標(即妨礙車輛行駛的目標)。roi_boundary_filter過濾規則如下圖。
5.6 lidar_tracking
多目標跟蹤,獲取目標運動的歷史軌跡,得到更加穩定的朝向、速度、位置等信息,得到跟蹤id。多目標跟蹤的結果可進一步用于障礙物軌跡預測。
detections 來自最新檢測的結果,tracks 表示歷史的匹配結果。Match 是目標匹配算法,最終得到三種匹配結果:
unassigned tracks:歷史的目標沒有和最新的檢測結果匹配上,這種情況會更新歷史 tracks,并刪除過老的 tracks
assignment:表示已經匹配上,根據dets和tracks更新tracks。
unassignement detections:最新檢測的結果沒有匹配上,添加到歷史tracks中。這時會賦予一個新的track‐id。
審核編輯 黃宇
-
激光雷達
+關注
關注
979文章
4460瀏覽量
196255 -
自動駕駛
+關注
關注
793文章
14846瀏覽量
179123
發布評論請先 登錄
FMCW和ToF激光雷達,哪種更適合自動駕駛?
自動駕駛激光雷達會傷害人體嗎?

如何為自動駕駛汽車選擇一款合適的激光雷達?

自動駕駛里的激光雷達有何作用?

自動駕駛激光雷達可以安裝在哪些位置?
決定自動駕駛激光雷達感知質量的因素有哪些?

從自動駕駛到具身智能,激光雷達緣何一邊被嫌棄,一邊被追捧?
自動駕駛只用激光雷達進行感知會有哪些問題?
自動駕駛激光雷達之間會相互干擾嗎?
激光雷達在自動駕駛領域中的優勢

激光雷達在自動駕駛中為何不可替代?

愛普生高精度車規晶振助力激光雷達自動駕駛

自動駕駛中的激光雷達是否會傷害人眼?
激光雷達技術:自動駕駛的應用與發展趨勢




 工商網監
工商網監
評論