 無人機載合成孔徑雷達系統研制手記(二):電子設計及天線
無人機載合成孔徑雷達系統研制手記(二):電子設計及天線


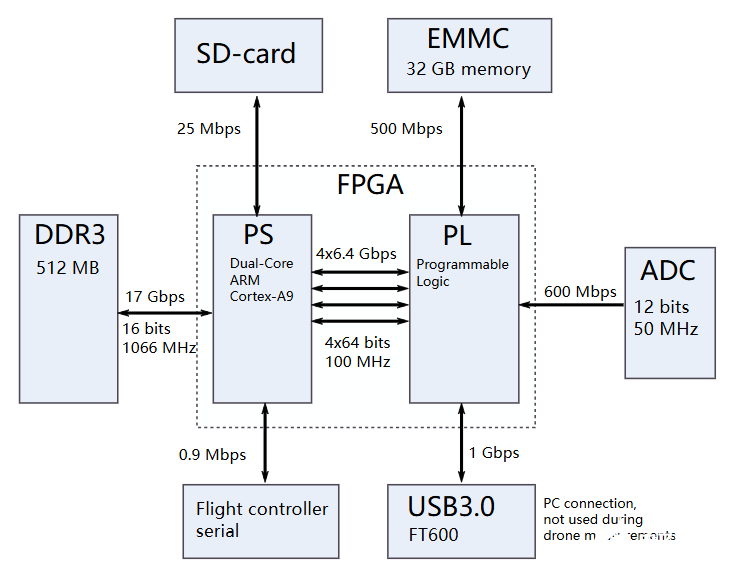
數字部分框圖
面對雷達系統嚴苛的時序控制與海量數據處理需求,傳統微控制器方案已無法滿足性能要求,必須采用FPGA架構。本設計選用Zynq 7020 SoC平臺,該芯片集成了可編程邏輯單元與雙核ARM處理器,在過往脈沖雷達設計中已積累成熟應用經驗。該型號FPGA在歐洲標準渠道報價約150歐元,而通過中國供應鏈可獲得顯著成本優勢。
存儲接口性能分析:
FPGA 控制器部分沒有很多高速接口,SD卡與EMMC控制器理論帶寬限制為25 MB/s,無法匹配ADC 50 MSPS的原始數據流
受限于無人機空間布局,1 Gbps 以太網接口無法添加樹莓派或其他類似計算機資源
新型Ultrascale+系列FPGA雖支持高速存儲接口(SD卡52 MB/s,EMMC 200 MB/s),但其500歐元級價格與供應鏈限制不適用于本項目
存儲器擴展方案:
在空間約束下,DDR3模組最大容量限制為1 GB,而單次測量數據量可達數GB量級。因此必須通過可編程邏輯單元構建高速外部通信接口。幸運的是,Dan Gisselquist(ZipCPU)開發了一個GPL3許可的SD卡和eMMC控制器,其支持的高速通信模式比ARM處理器附帶的硬IP更快。
冗余設計實現:
1. 雙路徑存儲架構
SD卡連接至ARM集成控制器(25 MB/s保底帶寬)
EMMC接入PL端高速控制器(基于sdspi內核)
2. 實測驗證
初期對sdspi控制器的50 MB/s穩定性存疑,實際驗證后確認其可靠性
保留傳統接口作為應急方案,最終未啟用
擴展接口設計:
集成FT600 USB3.0橋接芯片實現與PC的高速連接,該接口雖非無人機作業必需,但為實驗室調試、實時監控等應用場景提供靈活擴展能力。未來版本建議將SD卡全面遷移至PL端以釋放完整性能,預計可提升存儲帶寬至理論極限值。
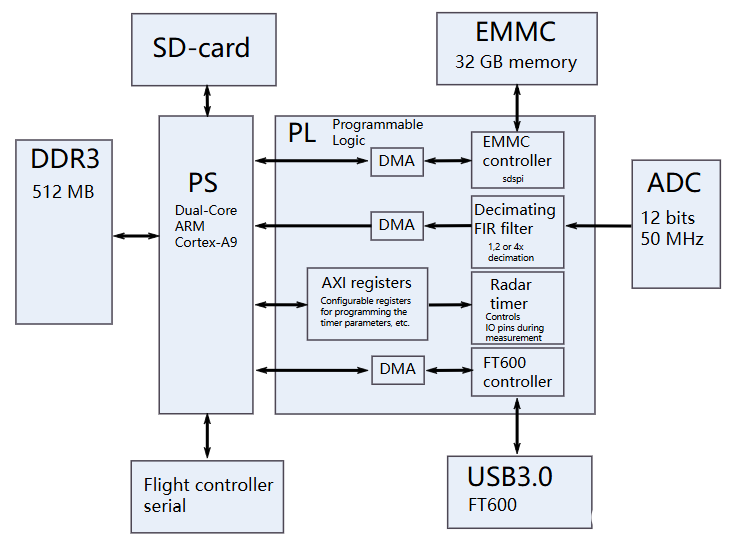
FPGA程序模塊框圖
在框圖層面,FPGA的功能架構相對簡潔。其核心設計由多個獨立功能模塊構成,通過DMA或AXI總線與處理器互聯。對于雷達系統而言,雷達定時器模塊尤為關鍵,其作用是在測量過程中實現內外信號的精準切換。該模塊需直接部署于FPGA邏輯單元中,以確保時鐘周期級的時間精度,從而保障雷達測量的相位穩定性。AXI總線在處理器端采用內存映射機制,通過向固定內存地址寫入控制參數即可實現雷達系統的靈活操控。
在ADC數據輸入后級聯的FIR濾波器,可通過1倍、2倍或4倍抽取率動態調整采樣速率。針對不同應用場景:
遠距離測量:需禁用抽取功能以保留最大中頻帶寬,確保信號完整性
中短距測量:建議啟用高倍抽取(如4倍),顯著降低數據存儲量并提升處理效率

此架構通過AXI總線的高效互聯與FPGA邏輯資源的靈活配置,實現了雷達系統在時序精度與數據處理效率間的平衡。
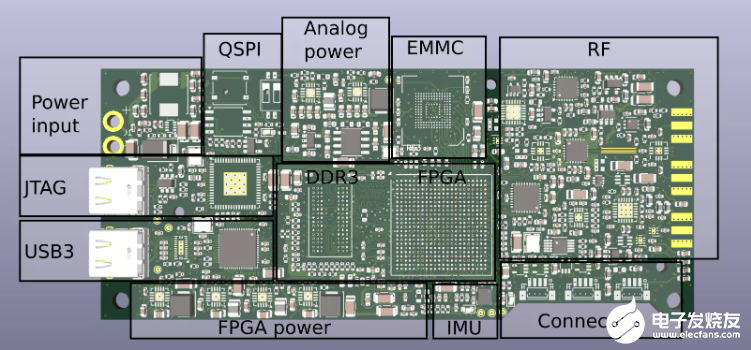
KiCad 中的3D模型
PCB 有六層,通過高密度元件布局實現空間最小化。由于單面組裝比雙面組裝成本低,除底部需手動焊接的SD卡接口外,其余元件均集中布置于頂層。
與我以前的許多雷達一樣,射頻部分在 PCB 和整個設計工作中占的空間相對較小。數字器件和穩壓器占據了 PCB 的大部分空間。
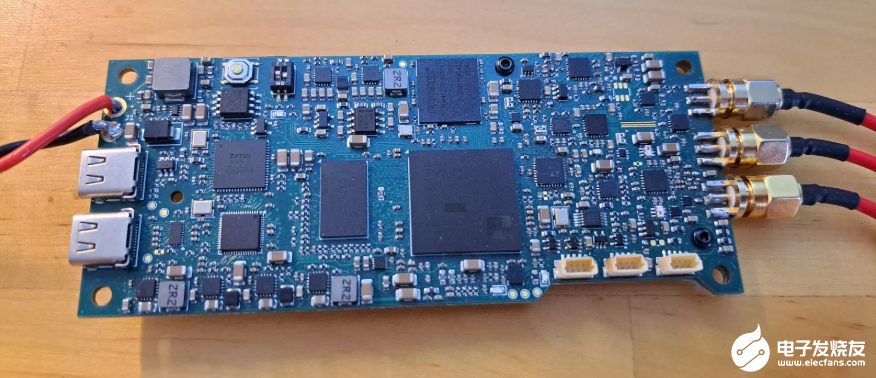
組裝完的 PCB
本雷達采用寬壓輸入設計,直接兼容無人機電池供電系統,支持12-30V直流輸入范圍。通過優化電源拓撲結構,省去外置DC/TC穩壓模塊,顯著提升系統集成度與能效表現。
由于空間有限,沒有足夠的空間安裝四個 SMA 連接器,我也不想使用任何微型射頻連接器。最上面的兩個連接器是用于 H 極化和 V 極化天線輸入的可切換 TX 輸出,最下面的第三個連接器是 RX 輸入。RX 極化開關位于外部 PCB 上,與 PCB 板右下方的三個四針 JST 連接器之一相連。另一個 JST 連接器用于連接飛行控制器的串行端口,第三個連接器目前未使用,但可用于連接 GPS 等設備。
還有兩個 USB-C 連接器:一個用于 JTAG 編程和調試 FPGA,另一個連接 USB3 到 FIFO 橋接芯片,可將數據快速傳輸到 PC。無人機使用時不需要它,但在測試和其他應用中很有用。
PCB 尺寸為 113 x 48 毫米。寬度剛好可以裝在無人機上,而長度則可以稍長一些。
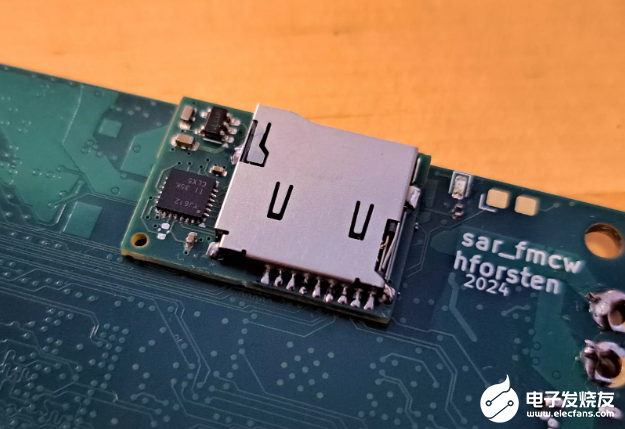 SD 卡插接 PCB
SD 卡插接 PCB
我確實犯了一個錯誤: 把 SD 卡的引腳誤連接到 1.8 V I/O 端口,而它們應該連接到 3.3 V I/O,SD 卡在這種較低電壓下無法工作。雷達可以不使用 SD 卡,而是將數據存儲到 EMMC 中,然后通過 USB 讀取數據,但使用 SD 卡要方便得多。我真的不想再訂購一塊 PCB 來彌補這個錯誤,于是我設計了一塊帶有電平轉換器的小型插接 PCB,焊接在之前的 SD 卡封裝上,從而彌補了這個錯誤。
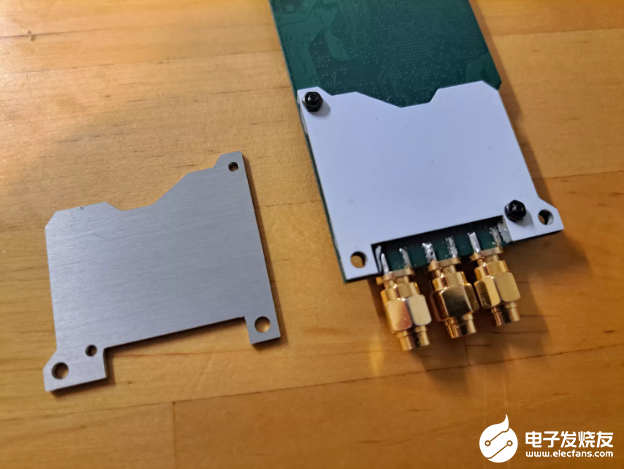
雷達 PCB 下的鋁制 PCB 散熱器
如果發射占空比較高,功率放大器會變得很熱。為了保持低溫,我訂購了定制的鋁基板 PCB,用螺栓固定在雷達 PCB 板下面。在功率放大器下面去掉阻焊層,在 PCB 和散熱片之間放置隔熱墊。5 塊電路板只花了 4 美元,而且效果很好。
無人機電子系統
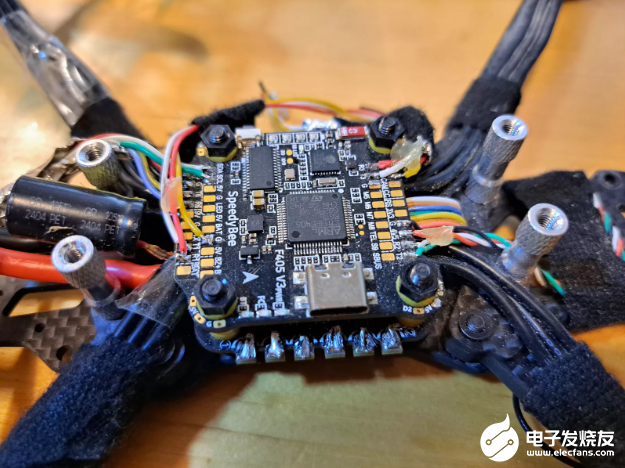
Speedybee F405 V3 飛行控制器
無人機套件附帶飛行控制器。附帶的飛行控制器是 Speedybee F405 V3。這是一款廉價的低端飛行控制器,只有 1 MB 閃存。它能勝任工作,但我還是建議購買更好一點的飛行控制器,閃存容量為 2 MB,價格相差不大。
有幾種可能的飛行控制器軟件。FPV 無人機最常用的有三種: Betaflight、Inav 和 ArduPilot。它們的主要區別在于 Betaflight 側重于快速響應的手動飛行,不支持自主飛行;Inav 與 Betaflight 共享大量代碼,也包括一些自主飛行支持;ArduPilot 具有最先進的自主飛行能力,功能豐富,但配置起來更具挑戰性。
我選擇使用 Ardupilot,發現它在這方面非常出色。它有非常好的 IMU 和 GPS 傳感器融合算法,對提高定位精度很有幫助。飛行控制器可以通過串行端口與雷達通信,從而在自主飛行任務期間啟用或禁用雷達,并為雷達提供位置信息。
 集成指南針的 GPS。它需要安裝在遠離電池導線的地方,以避免磁場對指南針造成影響。
集成指南針的 GPS。它需要安裝在遠離電池導線的地方,以避免磁場對指南針造成影響。
合成孔徑雷達 SAR 成像需要非常精確的位置信息,以實現正確的圖像聚焦。定位信息應精確到波長的幾分之一,在此頻率下僅為幾厘米(1 - 2 英寸)。許多商用合成孔徑雷達成像無人機使用 RTK GPS,并在地面上安裝第二個固定 GPS 接收機,可以獲得約 1 厘米的精確定位。缺點是成本比普通 GPS 高得多,而且 RTK GPS 接收機通常比普通 GPS 接收機大得多,很難安裝在無人機上。
好的非 RTK GPS 定位精度可能在1米左右。如此大的定位誤差如果不加以糾正,會對圖像造成很大誤差。幸運的是,可以通過雷達數據解決定位誤差問題,這就是所謂的自動對焦。自動對焦的缺點是需要在圖像形成過程中進行更多處理,但也可以使用普通 GPS。與慣性測量單元(IMU)進行傳感器融合可提高定位的準確性,獲得位置更新的速度也比僅使用 GPS 時的最高約 4 Hz 更快。
要實現自主飛行,無人機的飛行計算機還需要 GPS、IMU 和指南針。如果為雷達單獨再配備一套GPS和IMU,不僅會浪費空間,而且沒有必要。因此我依靠飛行計算機通過串行接口向雷達輸出其位置估計值。
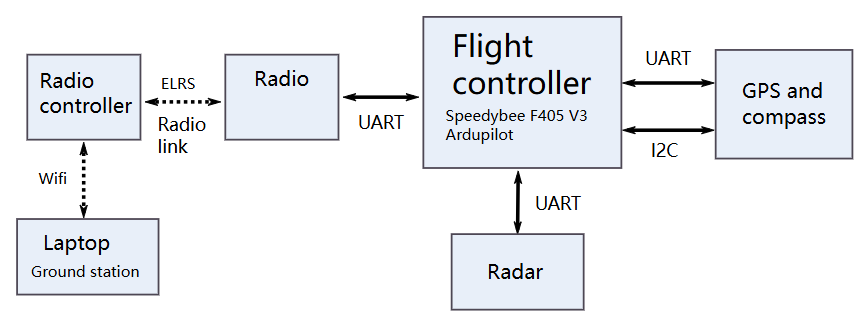 無人機框圖 無人機通過無線電遙控器進行操控。我使用的是 FPV 無人機常用的 ExpressLRS 無線電鏈路。無人機還通過無線電與電腦上運行的地面控制軟件連接。該軟件可用于編程自主任務參數、更改無人機設置、控制無人機以及在飛行過程中顯示遙測數據。地面站還可以通過飛行控制器向雷達發送信息,這樣就可以通過筆記本電腦對雷達參數進行編程。 近期,ExpressLRS(ELRS)增加了對Mavlink的支持,這使得可以使用單一的無線電設備來同時實現無線電遙控器和遙測通信的功能。這種改進大大簡化了無人機的通信系統架構,減少了設備數量和成本,同時也降低了通信干擾的可能性,提高了通信的可靠性和穩定性,對于無人機的飛行控制和數據傳輸來說是非常便利的,尤其在一些對通信效率和穩定性要求較高的應用場景中,這種改進的優勢更加明顯。
無人機框圖 無人機通過無線電遙控器進行操控。我使用的是 FPV 無人機常用的 ExpressLRS 無線電鏈路。無人機還通過無線電與電腦上運行的地面控制軟件連接。該軟件可用于編程自主任務參數、更改無人機設置、控制無人機以及在飛行過程中顯示遙測數據。地面站還可以通過飛行控制器向雷達發送信息,這樣就可以通過筆記本電腦對雷達參數進行編程。 近期,ExpressLRS(ELRS)增加了對Mavlink的支持,這使得可以使用單一的無線電設備來同時實現無線電遙控器和遙測通信的功能。這種改進大大簡化了無人機的通信系統架構,減少了設備數量和成本,同時也降低了通信干擾的可能性,提高了通信的可靠性和穩定性,對于無人機的飛行控制和數據傳輸來說是非常便利的,尤其在一些對通信效率和穩定性要求較高的應用場景中,這種改進的優勢更加明顯。
天線
理論上,天線波束寬度越寬,SAR圖像的分辨率就越高。SAR成像領域的一個著名結論是:在條帶模式SAR(固定天線角度和直線基線)中,最佳橫向分辨率可達L/2,其中L為天線長度。然而在實際應用中,更寬的波束未必更好。寬波束意味著更低的增益,這會降低信噪比并限制最大探測距離。由于天線增益在鏈路預算中是平方關系,當天線增益減半時,需要將脈沖數量增加四倍才能保持相同信噪比。
橫向分辨率取決于目標可見的基線長度,而天線波束越寬該基線越長。在聚束成像模式(天線持續跟蹤目標)下,橫向分辨率不再受限于天線波束寬度,且無人機平臺更易實現聚束成像。對于無人機SAR系統,最大可用基線長度常成為分辨率的主要限制因素,因為受限于視距飛行難以實現超長航跡。
聚束成像模式(或天線波束始終覆蓋目標的條帶模式)下的方位角分辨率可近似為:Δθ≈λ/L,其中λ為波長,L為航跡長度。橫向分辨率可通過Δy=2rsin(Δθ/2) 計算,r為目標距離。
無人機SAR面臨的主要挑戰是如何在有限空間內安裝足夠大的天線。由于采用FMCW雷達,需要獨立的發射和接收天線,這進一步壓縮了單天線的可用空間,同時低發射-接收泄漏要求需要保持一定間距。
我曾使用自制喇叭天線,但其尺寸(總長100mm,僅同軸-波導轉換器就達25mm)無法適配螺旋槳間距僅50mm的無人機平臺。雖然原喇叭天線未實現雙極化,但通過正交90度的雙饋源可輕松實現雙極化設計。
貼片天線因采用PCB覆銅工藝可實現小型化,同樣可通過正交雙饋源實現雙極化。但1.6mm厚FR4基板的簡單貼片存在帶寬窄(FR4介質參數偏差易致頻偏)、增益低等缺陷。雖然陣列設計可提升增益,但FR4基板的饋電網絡損耗會顯著增加。
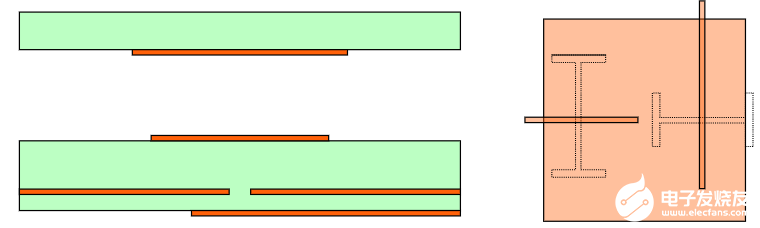
疊層孔徑耦合貼片天線。側視圖(左)和俯視圖(右)
在閱讀了一些科學論文后,我發現了這篇雙極化槽饋疊層貼片天線論文。它由貼片天線組成,貼片天線由微帶線饋電,微帶線通過地平面上的 H 型槽與貼片耦合。可以使用兩條饋電線和相距 90 度的槽來實現雙極化。第二個貼片懸掛在離第一個貼片幾毫米遠的地方,中間夾著空氣。與單個貼片相比,這種結構能獲得更寬的帶寬,因此能承受因 FR4 介電常數不準確而引起的頻率偏移。第二個貼片還能略微提高增益。
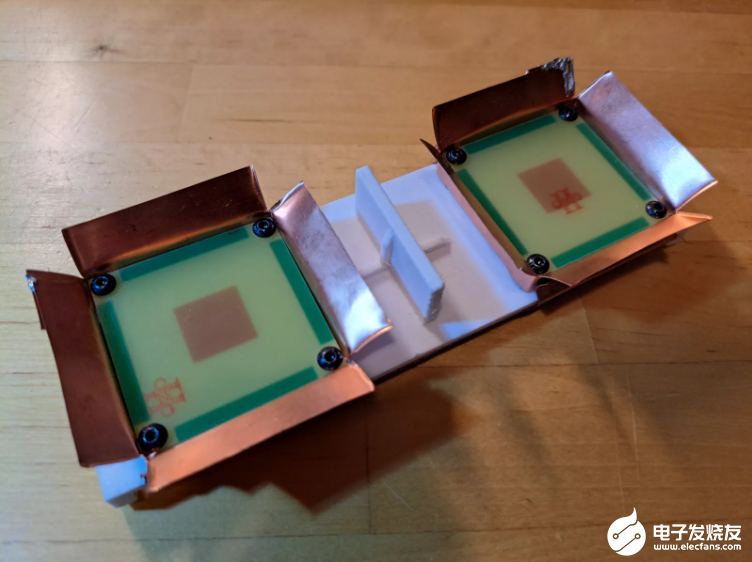
發送和接收貼片饋電喇叭天線
然而,更高的增益有助于提升信噪比。90度方向的旁瓣也應進一步抑制以降低發射-接收泄漏。為此,我在天線外圍增設了金屬板喇叭結構,形成疊層貼片饋電喇叭天線。該設計使天線高度增加10毫米,但實驗發現僅環繞貼片間隙的金屬板包裹結構(不增加高度)也能有效提升增益并抑制旁瓣。雖然尚未在文獻中發現類似結構,但考慮到其設計直觀性,類似方案可能早已存在。
相較于當前四瓣式設計,采用填充邊角的金字塔形喇叭可能在增益和機械強度方面略有優勢。但現有方案更便于手工制作——我使用剪刀手工裁剪銅片并通過焊接完成組裝。
該天線完美滿足所有需求:雙極化特性、超寬帶寬、高增益、相比同增益的同軸-波導饋電喇叭天線更薄型化,且制造成本低廉(僅需兩塊FR4電路板、少量銅片及緊固件)。若采用低損耗射頻材料(如羅杰斯RO4350B),增益預計可提升0.5-1.0 dB,但原型階段成本將激增百倍,性價比過低。
天線間設置的0.25×0.5波長微型隔離墻有效降低了收發耦合。經多尺寸測試驗證,該微型隔離墻的效果優于無隔離墻方案及更高墻體方案。
不計SMA接頭時,天線總高度為18毫米(其中喇叭結構占10毫米)。含SMA接頭的總高度為28毫米。貼片基板尺寸為45×45毫米,喇叭開口尺寸為65×65毫米。

天線背面。每根天線都有兩個 SMA 接頭,一個用于 H 極化,另一個用于 V 極化
天線背面覆蓋銅箔以抑制后向輻射。這一設計至關重要,因為天線直接安裝在無屏蔽的雷達PCB板正上方。若無屏蔽措施,發射天線的后向輻射將加劇收發通道耦合。此外,在收發天線隔離墻內嵌銅箔(通過膠帶固定),進一步增強了隔離效果。
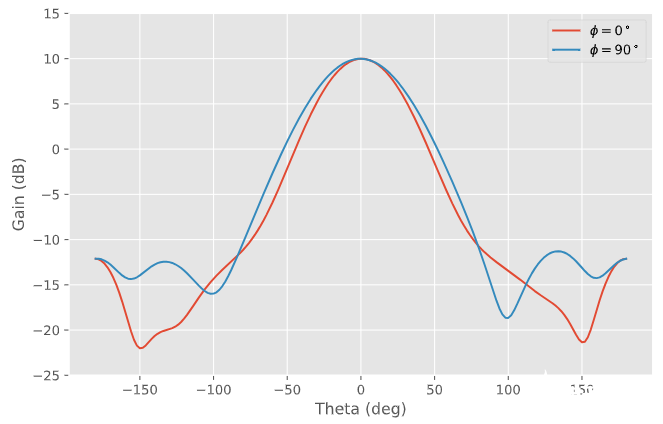
天線的模擬輻射模式
仿真結果顯示:在0°/90°方向上,天線-3 dB波束寬度分別為50度/60度。H/V饋電槽呈90度正交布局,兩端口輻射方向圖形態相似但空間取向正交。仿真峰值增益達10.0 dB。
90度方向旁瓣抑制約-10 dB,這對降低收發泄漏至關重要。由于天線輻射方向圖存在非對稱性,將另一副天線旋轉90度安裝可確保HH與VV極化間的方向圖匹配度。當發射天線通過首端口發射H極化波時,接收天線通過另一端口接收H極化波,V極化同理,從而保證兩種同極化模式的雙程方向圖匹配。然而在交叉極化(HV/VH)模式下,由于收發共用同端口,其方向圖特性與同極化模式存在差異。
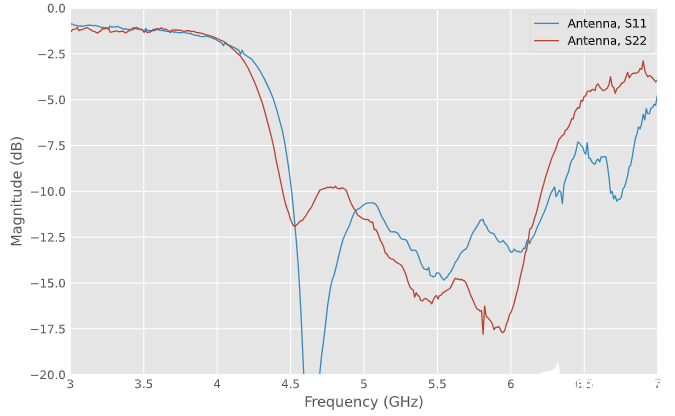
測量的天線 S 參數
由于耦合槽尺寸略有不同,H 端口和 V 端口的匹配略有差異。天線的可用帶寬約為 4.5 千兆赫至 6.2 千兆赫,對這一應用來說綽綽有余。
原文轉載自 https://hforsten.com/homemade-polarimetric-synthetic-aperture-radar-drone.html,已進行翻譯及校對優化
注意:如果想第一時間收到 KiCad 內容推送,請點擊下方的名片,按關注,再設為星標。
常用合集匯總:
和 Dr Peter 一起學 KiCad
KiCad 8 探秘合集
KiCad 使用經驗分享
KiCad 設計項目(Made with KiCad)
常見問題與解決方法
KiCad 開發筆記
插件應用
發布記錄
審核編輯 黃宇
-
無人機
+關注
關注
236文章
11300瀏覽量
195705 -
雷達系統
+關注
關注
7文章
261瀏覽量
29564
發布評論請先 登錄
無人機定高雷達升級歷程

新規落地后無人機起飛不難,如何通過3225封裝確保特種無人機系統穩定運行?


一文讀懂無人機的“心臟”-電機

無人機智能巡檢系統的技術特點與應用優勢
離軸技術:賦能無人機精準配送的核心芯片應用
Vicor電源模塊在高空長航時無人機的應用
RK3576賦能無人機巡檢:多路視頻+AI識別引領智能化變革
科普|無人機反制槍介紹




 工商網監
工商網監
評論