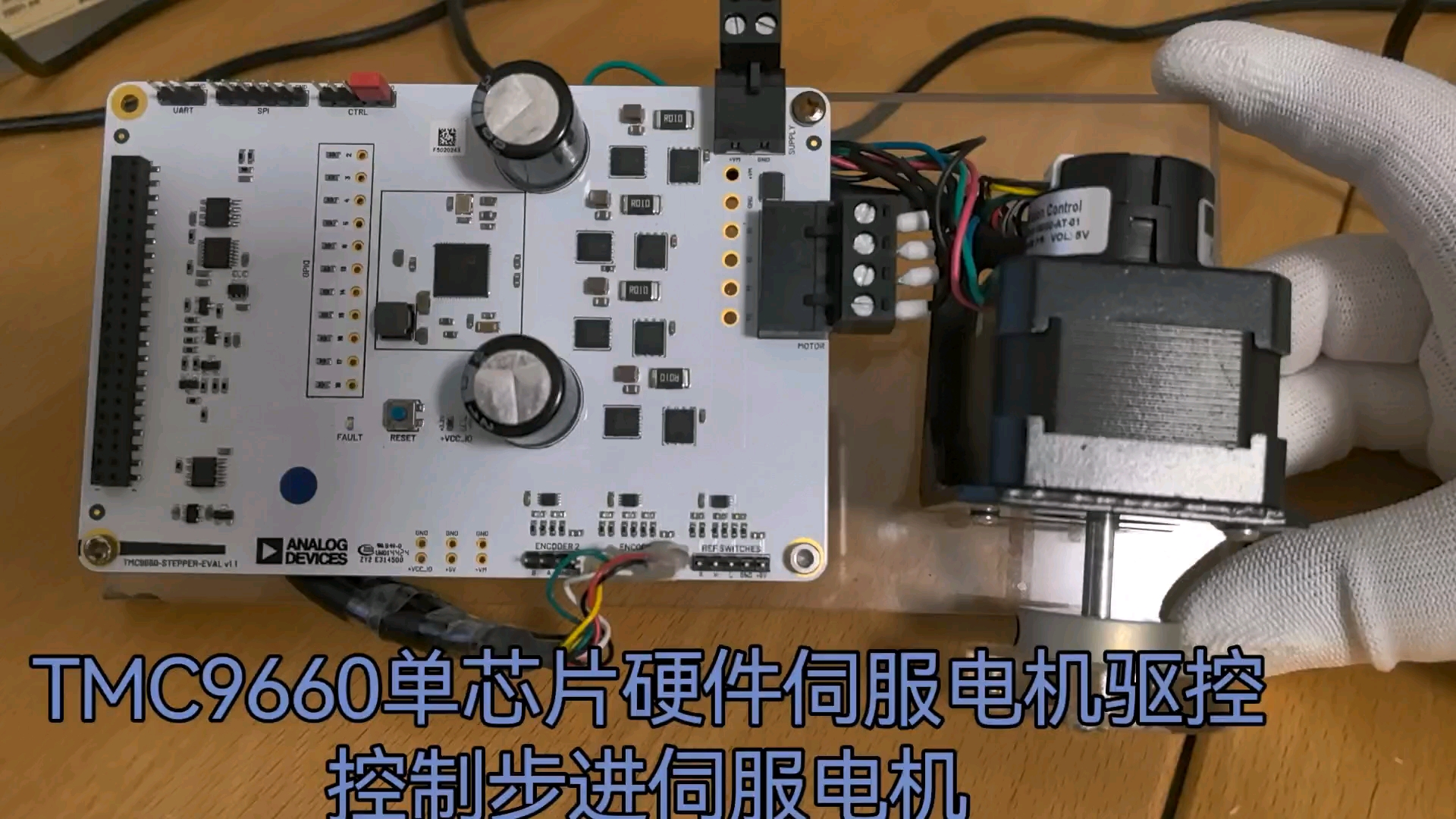
本文為創(chuàng)龍科技DR1M90 評(píng)估板的 IgH EtherCAT 主站應(yīng)用案例,基于 Linux-RT 內(nèi)核與開源協(xié)議棧,實(shí)現(xiàn)伺服電機(jī)正反轉(zhuǎn)實(shí)時(shí)控制。案例通訊周期 1ms,支持電機(jī) 0-10000(正
2026-01-04 15:40:03 64
64 
Motor)是一種特殊設(shè)計(jì)的電機(jī),相對(duì)于傳統(tǒng)的伺服電機(jī),沒有確定的固定單元,可以自由地適配不同客戶的外殼、軸承以及反饋裝置等部件的集成安裝 。 無框電機(jī)的組成 無框電機(jī)由獨(dú)立的轉(zhuǎn)子和定子部件組成,這些部件分別安裝到機(jī)械設(shè)備中,以將扭矩
2025-12-23 08:33:08275 交流伺服電機(jī)作為現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域的核心驅(qū)動(dòng)元件,憑借其高精度、快速響應(yīng)和穩(wěn)定運(yùn)行的特點(diǎn),已成為數(shù)控機(jī)床、機(jī)器人、精密儀器等高端裝備的關(guān)鍵部件。其技術(shù)發(fā)展與應(yīng)用實(shí)踐呈現(xiàn)出鮮明的時(shí)代特征,本文將從
2025-12-13 07:37:34200 
伺服電機(jī)增益調(diào)節(jié)是運(yùn)動(dòng)控制中的核心環(huán)節(jié),直接影響系統(tǒng)的響應(yīng)速度、穩(wěn)定性和精度。本文將深入解析增益參數(shù)的作用機(jī)理、調(diào)節(jié)方法及典型應(yīng)用場(chǎng)景,幫助工程師實(shí)現(xiàn)伺服系統(tǒng)的最佳性能匹配。 一、增益參數(shù)
2025-12-08 07:42:00614 電機(jī)作為現(xiàn)代工業(yè)的核心動(dòng)力源,其接線方式的正確與否直接關(guān)系到設(shè)備的運(yùn)行效率、安全性和使用壽命。不同類型的電機(jī)有著截然不同的接線方法,掌握這些技巧不僅能避免燒毀電機(jī)的風(fēng)險(xiǎn),還能充分發(fā)揮電機(jī)的性能潛力
2025-12-08 07:35:39954 
伺服電機(jī)是火箭伺服系統(tǒng)的核心組成部分,其核心功能是精確、快速、可靠地執(zhí)行飛行控制計(jì)算機(jī)的指令,通過擺動(dòng)發(fā)動(dòng)機(jī)的噴管,改變發(fā)動(dòng)機(jī)推力的方向,從而產(chǎn)生控制力矩,實(shí)現(xiàn)對(duì)火箭姿態(tài)(俯仰、偏航、滾動(dòng))和飛行軌跡的穩(wěn)定與控制。
2025-12-05 16:19:221315 
在泡沫起升儀的沖程控制中,毫米級(jí)定位精度是保障泡沫輸出穩(wěn)定性、作業(yè)位置準(zhǔn)確性的關(guān)鍵。步進(jìn)伺服電機(jī)細(xì)分驅(qū)動(dòng)技術(shù)作為核心電子方案,通過優(yōu)化電機(jī)運(yùn)行的控制邏輯,將電機(jī)的運(yùn)動(dòng)分解為更精細(xì)的單元,從而實(shí)現(xiàn)沖程
2025-12-04 09:20:40229 
伺服電機(jī)作為自動(dòng)化控制系統(tǒng)的核心執(zhí)行元件,其控制方式直接決定了設(shè)備的動(dòng)態(tài)響應(yīng)、定位精度和運(yùn)行效率。隨著工業(yè)4.0和智能制造的發(fā)展,伺服控制技術(shù)已從傳統(tǒng)的模擬量控制演變?yōu)閿?shù)字化、網(wǎng)絡(luò)化的智能控制體系
2025-12-01 07:37:18427 
電機(jī)轉(zhuǎn)動(dòng)慣量是電機(jī)設(shè)計(jì)和應(yīng)用中一個(gè)至關(guān)重要的參數(shù),它不僅影響電機(jī)的動(dòng)態(tài)響應(yīng)特性,還直接關(guān)系到系統(tǒng)的穩(wěn)定性、能耗以及控制精度。在工業(yè)自動(dòng)化、機(jī)器人、電動(dòng)汽車等領(lǐng)域,對(duì)電機(jī)轉(zhuǎn)動(dòng)慣量的準(zhǔn)確分析和優(yōu)化已成為
2025-11-29 07:40:58773 
伺服系統(tǒng),通過穩(wěn)定傳輸特性消除連接環(huán)節(jié)對(duì)精準(zhǔn)控制的干擾,成為伺服控制系統(tǒng)的可靠支撐。動(dòng)力線保障電能穩(wěn)定傳輸伺服動(dòng)力線作為伺服驅(qū)動(dòng)器與電機(jī)的電能傳輸載體,其穩(wěn)定性直接
2025-11-28 08:03:33527 
同步電機(jī)控制方式及驅(qū)動(dòng)技巧永磁同步電機(jī)在工業(yè)上用的相對(duì)較多。永磁交流伺服電機(jī)系統(tǒng)具有以下等優(yōu)點(diǎn):
電動(dòng)機(jī)無電刷和換向器,工作可靠,維護(hù)和保養(yǎng)簡(jiǎn)單;
定子繞組散熱快;
慣量小,易提高系統(tǒng)的快速性;
適應(yīng)
2025-11-27 08:04:21
電機(jī)頻率問題在現(xiàn)代工業(yè)生產(chǎn)和日常生活中扮演著至關(guān)重要的角色。無論是家用電器、工業(yè)生產(chǎn)設(shè)備還是新能源發(fā)電系統(tǒng),電機(jī)的運(yùn)行效率、能耗控制以及壽命管理都與頻率調(diào)節(jié)密切相關(guān)。本文將深入探討電機(jī)頻率的核心
2025-11-25 07:32:21557 Parker提供了多款不同的伺服電機(jī),性能各有不同,針對(duì)特定易燃易爆場(chǎng)所使用的防爆伺服電機(jī),與普通通用伺服電機(jī)存在諸多區(qū)別,接下來就進(jìn)一步看看Parker防爆伺服電機(jī)與普通伺服電機(jī)的區(qū)別
2025-11-20 13:36:27265 
在傳統(tǒng)的PI電流控制器中,一旦PWM周期確定了,那么系統(tǒng)帶寬也就隨之確定了。由于電機(jī)本身的阻感電氣特性是系統(tǒng)中慣性最大的部分,PI控制器需要對(duì)這部分進(jìn)行零極點(diǎn)對(duì)消,在此基礎(chǔ)上如果要進(jìn)一步提高電流環(huán)帶寬,只能對(duì)Figure1中的剩余兩個(gè)慣性環(huán)節(jié)進(jìn)行改善。
2025-11-17 09:57:534019 
上回我們介紹了EtherCAT是如何利用SSC產(chǎn)生的sync信號(hào),與電機(jī)控制系統(tǒng)完成同步的,如此我們即可保證整個(gè)控制系統(tǒng)的同步性能伺服控制。在此基礎(chǔ)上,伺服電機(jī)的實(shí)時(shí)精確控制要求電機(jī)控制系統(tǒng)具有較高的響應(yīng)帶寬,其中,電機(jī)的電流環(huán)路設(shè)計(jì)對(duì)于系統(tǒng)帶寬的提升,扮演著至關(guān)重要的角色。
2025-11-17 09:53:297032 
伺服電纜作為工業(yè)自動(dòng)化系統(tǒng)中的關(guān)鍵組件,其長度問題直接影響設(shè)備性能與系統(tǒng)穩(wěn)定性。本文將圍繞伺服電纜長度對(duì)信號(hào)傳輸、電磁干擾、電壓降及安裝維護(hù)的影響展開深度解析,并提供專業(yè)解決方案。 一、電纜長度
2025-11-01 07:40:22668 步進(jìn)伺服電機(jī)作為工業(yè)自動(dòng)化領(lǐng)域的關(guān)鍵部件,其穩(wěn)定性和精度直接影響設(shè)備性能。然而在實(shí)際應(yīng)用中,電機(jī)可能因參數(shù)配置、機(jī)械負(fù)載或環(huán)境因素出現(xiàn)異常。本文將針對(duì)六大典型問題提供系統(tǒng)性解決方案,結(jié)合工程實(shí)踐
2025-10-30 07:41:26464 在自動(dòng)化產(chǎn)線的調(diào)試現(xiàn)場(chǎng),您是否曾為不同協(xié)議設(shè)備間的“語言障礙”而焦頭爛額?當(dāng)手頭的優(yōu)質(zhì)伺服電機(jī)僅支持Modbus,而您的主控系統(tǒng)卻基于Profinet,這道協(xié)議鴻溝是否讓您夜不能寐?別擔(dān)心
2025-10-22 15:05:29201 
大家在運(yùn)動(dòng)控制的時(shí)候是用伺服電機(jī)的還是用步進(jìn)電機(jī)做定位控制了?為什么有時(shí)候用伺服電機(jī),有時(shí)候又步進(jìn)電機(jī)?這是什么原因呢?本期我們就一起來探討一下步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別!
2025-10-15 14:32:511496 
三菱伺服電機(jī)在工業(yè)自動(dòng)化領(lǐng)域應(yīng)用廣泛,其高性能和穩(wěn)定性備受認(rèn)可。然而在實(shí)際使用過程中,部分用戶可能會(huì)遇到電機(jī)運(yùn)行時(shí)出現(xiàn)抖動(dòng)或異常聲響的問題。這類問題不僅影響設(shè)備運(yùn)行精度,還可能縮短電機(jī)使用壽命。本文
2025-10-14 07:37:021053 舵機(jī)與伺服電機(jī)都屬于 可精確控制的驅(qū)動(dòng)裝置 ,但二者在定義范圍、結(jié)構(gòu)組成、控制方式和應(yīng)用場(chǎng)景上存在顯著差異,并非完全等同(舵機(jī)是伺服電機(jī)的 “特殊子集”)。以下從核心維度展開對(duì)比,幫助清晰區(qū)分: 一
2025-10-13 10:21:071165 伺服電機(jī)作為自動(dòng)化控制系統(tǒng)中執(zhí)行元件的核心部件,其制動(dòng)性能直接影響設(shè)備的定位精度和安全可靠性。目前主流的伺服電機(jī)制動(dòng)方式包括動(dòng)態(tài)制動(dòng)、再生制動(dòng)和電磁機(jī)械制動(dòng)三種,它們?cè)谥苿?dòng)原理、應(yīng)用場(chǎng)景及技術(shù)特點(diǎn)上
2025-09-19 18:26:111302 
,且采用 Ethernet/IP協(xié)議 進(jìn)行通信,能夠高效地實(shí)現(xiàn)數(shù)據(jù)的快速傳輸與控制指令的下達(dá)。同時(shí),為了實(shí)現(xiàn)精準(zhǔn)的運(yùn)動(dòng)控制,選用了某知名品牌(如西門子)的伺服電機(jī),該伺服電機(jī)性能卓越,采用 ProfiNet協(xié)議 與其他設(shè)備進(jìn)行通信連接。但由于這兩種設(shè)
2025-09-10 11:03:50548 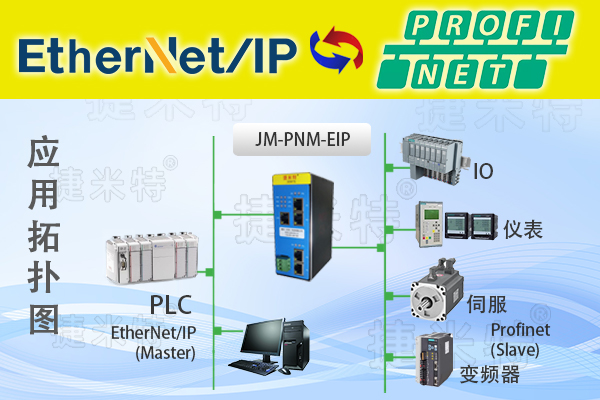
在某精密制造企業(yè)的測(cè)試與測(cè)量實(shí)驗(yàn)室中,需要對(duì)一款新型伺服電機(jī)進(jìn)行性能測(cè)試。該實(shí)驗(yàn)室的核心控制系統(tǒng)采用基恩士(Keyence)PLC作為主站設(shè)備,其基于EtherCAT協(xié)議進(jìn)行高速數(shù)據(jù)傳輸,能夠?qū)崿F(xiàn)對(duì)測(cè)試流程的精確調(diào)度和控制。
2025-09-06 14:13:10744 
PART1人形機(jī)器人心臟:伺服電機(jī)驅(qū)動(dòng)器隨著人工智能和機(jī)器人技術(shù)的飛速發(fā)展,人形機(jī)器人正逐步成為智能制造和未來生活的新伙伴。在這一領(lǐng)域,伺服電機(jī)作為人形機(jī)器人的“心臟”,其性能直接決定了機(jī)器人的運(yùn)動(dòng)
2025-08-30 10:57:24533 
在現(xiàn)代工業(yè)自動(dòng)化的大舞臺(tái)上,伺服電機(jī)編碼器就像是一位默默無聞卻至關(guān)重要的幕后英雄。它精準(zhǔn)地測(cè)量和反饋電機(jī)的位置、速度等關(guān)鍵信息,確保整個(gè)系統(tǒng)能夠高效、穩(wěn)定地運(yùn)行。然而,要讓這位“英雄”充分發(fā)揮其作用
2025-08-29 17:27:21715 在科技日新月異的今天,機(jī)器人正以前所未有的態(tài)勢(shì)融入我們的生產(chǎn)生活。從工業(yè)流水線上不知疲倦的機(jī)械臂,到家庭中靈活可愛的掃地機(jī)器人,它們的身影無處不在。而在機(jī)器人的核心部件中,伺服電機(jī)和機(jī)器人關(guān)節(jié)的性能
2025-08-28 18:23:51608 背景介紹在工業(yè)自動(dòng)化、機(jī)器人及精密制造領(lǐng)域,伺服電機(jī)對(duì)電氣連接的穩(wěn)定性、抗振性與空間適配性要求嚴(yán)苛。凌科DL28系列工業(yè)連接器,作為具備多重創(chuàng)新與優(yōu)勢(shì)的全塑連接器,正成為伺服電機(jī)大電流連接的全新理想
2025-08-28 18:13:27396 
步進(jìn)電機(jī)作為一種常見的執(zhí)行元件,因其結(jié)構(gòu)簡(jiǎn)單、控制方便等優(yōu)點(diǎn)被廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人、醫(yī)療設(shè)備等領(lǐng)域。然而,傳統(tǒng)的開環(huán)控制方式存在失步、振蕩等問題,難以滿足高精度應(yīng)用場(chǎng)景的需求。本文將探討
2025-08-27 17:55:08843 隨著工業(yè)自動(dòng)化技術(shù)的快速發(fā)展,伺服電機(jī)作為核心執(zhí)行元件,其位置檢測(cè)精度和可靠性直接影響系統(tǒng)性能。傳統(tǒng)光電編碼器存在易受污染、抗震性差等固有缺陷,而磁性編碼器憑借非接觸式測(cè)量、抗干擾能力強(qiáng)等優(yōu)勢(shì),正
2025-08-16 14:15:311124 隨著工業(yè)自動(dòng)化和智能制造領(lǐng)域的快速發(fā)展,高性能伺服電機(jī)作為核心執(zhí)行部件,其動(dòng)態(tài)響應(yīng)能力直接決定了設(shè)備的精度與效率。在這一背景下,MT6816IC高速磁性角度編碼器芯片的誕生,為伺服系統(tǒng)性能提升提供了
2025-08-15 17:37:01823 在工業(yè)自動(dòng)化領(lǐng)域,伺服電機(jī)扮演著至關(guān)重要的角色,其動(dòng)態(tài)響應(yīng)性能直接影響著整個(gè)生產(chǎn)系統(tǒng)的效率和精度。而bldc驅(qū)動(dòng)方案|整套磁編方案|磁編芯片(IC)|無刷馬達(dá)驅(qū)動(dòng)ic|艾畢勝電子的出現(xiàn),為優(yōu)化伺服電機(jī)動(dòng)態(tài)響應(yīng)性能帶來了新的契機(jī)。今天,咱們就來深入探討一下MT6835是如何在這方面大展身手的。
2025-08-06 17:23:37677 隨著工業(yè)自動(dòng)化、機(jī)器人技術(shù)和高端裝備制造的快速發(fā)展,伺服電機(jī)作為核心驅(qū)動(dòng)部件,其控制精度和響應(yīng)速度的要求不斷提升。傳統(tǒng)的伺服電機(jī)控制主要依賴于光電編碼器或旋轉(zhuǎn)變壓器進(jìn)行位置反饋,但這些技術(shù)在高轉(zhuǎn)速
2025-08-05 17:44:44859 永磁電機(jī)調(diào)速驅(qū)動(dòng)器、伺服驅(qū)動(dòng)器與變頻器作為現(xiàn)代工業(yè)控制領(lǐng)域的三大核心動(dòng)力裝置,在電機(jī)控制領(lǐng)域各具特色且存在交叉應(yīng)用。但在應(yīng)用過程中,它們之間存在一些異同點(diǎn)。以下是對(duì)這三者的詳細(xì)比較: 一、永磁電機(jī)
2025-07-30 07:35:411073 
在工業(yè)自動(dòng)化、機(jī)器人技術(shù)以及新能源汽車等眾多領(lǐng)域,伺服電機(jī)控制系統(tǒng)都扮演著至關(guān)重要的角色。而測(cè)量電機(jī)的旋轉(zhuǎn)角度,對(duì)于實(shí)現(xiàn)精確的運(yùn)動(dòng)控制起著決定性作用。今天,我們就來深入探討一下MT6825磁編芯片如何為伺服電機(jī)控制系統(tǒng)帶來全角度測(cè)量能力。
2025-07-29 16:40:39525 伺服電機(jī)作為工業(yè)自動(dòng)化、機(jī)器人、數(shù)控機(jī)床等高端裝備的核心執(zhí)行部件,其控制精度直接影響設(shè)備性能。傳統(tǒng)光電編碼器受限于機(jī)械結(jié)構(gòu)易磨損、抗干擾能力弱等問題,難以滿足高精度場(chǎng)景需求。而MT6825磁編碼器
2025-07-28 17:20:50586 
伺服電機(jī)的運(yùn)行需要一個(gè)參考點(diǎn),這個(gè)參考點(diǎn)就是原點(diǎn)。原點(diǎn)通常是由光電開關(guān)或機(jī)械開關(guān)來確定的,其位置是固定的。當(dāng)伺服電機(jī)運(yùn)行時(shí),控制器會(huì)根據(jù)原點(diǎn)的位置來計(jì)算電機(jī)的位置。如果沒有原點(diǎn),控制器就無法確定電機(jī)的位置,從而無法精確地控制機(jī)器的運(yùn)動(dòng)。
2025-07-26 09:43:403012 
在當(dāng)今工業(yè)自動(dòng)化飛速發(fā)展的時(shí)代,伺服電機(jī)控制系統(tǒng)作為眾多設(shè)備的核心動(dòng)力源,其性能的優(yōu)劣直接影響著整個(gè)工業(yè)生產(chǎn)的效率和質(zhì)量。而磁編芯片作為伺服電機(jī)控制系統(tǒng)中的關(guān)鍵組件,對(duì)于實(shí)現(xiàn)精確的角度測(cè)量和控制起著
2025-07-24 16:52:25607 伺服電機(jī)(英文:servomotor),在機(jī)器人、制造設(shè)備以及汽車等眾多領(lǐng)域有著廣泛應(yīng)用。
2025-07-18 15:11:193837 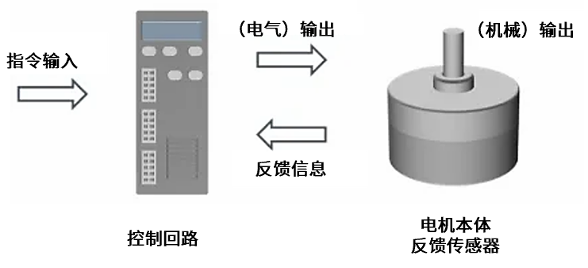
伺服系統(tǒng)與變頻器作為工業(yè)自動(dòng)化領(lǐng)域的核心驅(qū)動(dòng)設(shè)備,在運(yùn)動(dòng)控制中取得關(guān)鍵的作用。盡管兩者均涉及電機(jī)調(diào)速,但其設(shè)計(jì)理念、技術(shù)架構(gòu)和應(yīng)用場(chǎng)景存在顯著差異。以下從工作原理、性能特點(diǎn)、應(yīng)用場(chǎng)景等維度展開深度
2025-07-13 16:30:021698 
PLC與伺服控制在控制對(duì)象、控制方式、硬件結(jié)構(gòu)、應(yīng)用場(chǎng)景、系統(tǒng)精度與靈活性等方面存在顯著區(qū)別,以下是具體分析: 控制對(duì)象 PLC:適用于邏輯控制、運(yùn)動(dòng)控制、流程控制等,可對(duì)生產(chǎn)線、機(jī)械設(shè)備等進(jìn)行整體
2025-06-25 17:54:091118 摘要:分析當(dāng)前主流微電機(jī)轉(zhuǎn)子整流子精車設(shè)備的優(yōu)缺點(diǎn),針對(duì)存在問題研制了一種新型的基于PC控制的單刀雙伺服精車機(jī)。闡述了單刀雙伺服精車機(jī)的設(shè)計(jì)過程,技術(shù)特點(diǎn)。試驗(yàn)結(jié)果表明,本精車機(jī)加工的轉(zhuǎn)子徑向跳動(dòng)
2025-06-24 14:09:04
在多電機(jī)伺服系統(tǒng)的調(diào)試及使用過程中,需要實(shí)時(shí)獲取系統(tǒng)運(yùn)行時(shí)各個(gè)電機(jī)和負(fù)載的運(yùn)行狀態(tài)數(shù)據(jù),并通過對(duì)相應(yīng)數(shù)據(jù)的分析進(jìn)行控制器參數(shù)的整定和故障判斷。而在傳統(tǒng)的基于CAN總線的多電機(jī)系統(tǒng)中,總線上傳輸?shù)臄?shù)據(jù)
2025-06-23 07:15:19
摘要:高轉(zhuǎn)矩密度、強(qiáng)抗沖擊性和低噪聲已經(jīng)成為艦船用推進(jìn)電機(jī)三大特征,以某推進(jìn)電機(jī)的端蓋結(jié)構(gòu)為分析研究對(duì)象,以有限元數(shù)值仿真分析為手段,分析了該結(jié)構(gòu)在受到?jīng)_擊時(shí)的反應(yīng)及隨材料屬性變化的規(guī)律變化規(guī)律
2025-06-23 07:12:36
摘要:介紹了一種數(shù)字液壓閥及其控制系統(tǒng),該閥采用了伺服閥的滑閥部分,驅(qū)動(dòng)和反饋采用了何服電機(jī)來執(zhí)行,可以進(jìn)行位移閉環(huán)控制和力閉環(huán)控制,功能上完全可以替代電液伺服閥:頻響可以達(dá)到200Hz(如果伺服
2025-06-19 10:59:58
的電樞電壓,是大齒輪的角速度,是大齒輪的轉(zhuǎn)動(dòng)慣量。
純分享帖,需要者可點(diǎn)擊附件免費(fèi)獲取完整資料~~~*附件:雙伺服電機(jī)驅(qū)動(dòng)的鉆床齒隙模型仿真分析.pdf【免責(zé)聲明】本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請(qǐng)第一時(shí)間告知,刪除內(nèi)容!
2025-06-18 16:26:58
強(qiáng)的
價(jià)格方面不同
步進(jìn)電機(jī)一個(gè)最大的優(yōu)點(diǎn)就是便宜;伺服電機(jī)的價(jià)格普遍是步進(jìn)電機(jī)的幾十倍
總結(jié):交流伺服系統(tǒng)在許多性能方面都優(yōu)于步進(jìn)電機(jī)但是控制也會(huì)更加復(fù)雜,如果我們對(duì)電機(jī)的需求是操作簡(jiǎn)單、價(jià)格便宜、可以開環(huán)控制、距離誤差小在一些要求不高的場(chǎng)合可以選用步進(jìn)電機(jī)。
2025-06-18 13:27:36
這些指令主要是針對(duì)用 PLC 直接聯(lián)動(dòng)伺服放大器,目的是可以不借助其他擴(kuò)展設(shè)備(例如1GM 模塊)來進(jìn)行簡(jiǎn)單的點(diǎn)位控制, 使用這些指令時(shí)最好配合三菱的伺服放大器 (如 MR-J2)。然而,我們也可以用這些指令來控制步進(jìn)電機(jī)的運(yùn)行,下面我們來了解相關(guān)指令的用法。
2025-06-12 10:33:511721 
什么是伺服電機(jī)編碼器?
伺服電機(jī)編碼器是伺服系統(tǒng)中的核心反饋元件,用于實(shí)時(shí)檢測(cè)電機(jī)的轉(zhuǎn)速、位置、角度等參數(shù),并將信號(hào)反饋給控制器(如伺服驅(qū)動(dòng)器),形成閉環(huán)控制,確保電機(jī)運(yùn)動(dòng)的精準(zhǔn)性和穩(wěn)定性。
其
2025-06-09 11:07:312334 
純分享帖,需要者可點(diǎn)擊附件免費(fèi)獲取完整資料~~~*附件:機(jī)床伺服電機(jī)的選型方法分析.pdf【免責(zé)聲明】本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請(qǐng)第一時(shí)間告知,刪除內(nèi)容!
2025-05-29 14:13:56
純分享帖,需要者可點(diǎn)擊附件免費(fèi)獲取完整資料~~~*附件:電機(jī)噪聲的分析與控制.pdf【免責(zé)聲明】本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請(qǐng)第一時(shí)間告知,刪除內(nèi)容!
2025-05-27 16:19:43
、銑削、鉆孔等高精度加工。 案例 :伺服系統(tǒng)控制刀具的精確移動(dòng),實(shí)現(xiàn)±0.001mm的加工精度。 機(jī)器人關(guān)節(jié)控制 場(chǎng)景 :工業(yè)機(jī)器人、協(xié)作機(jī)器人(如焊接、裝配、搬運(yùn))。 案例 :伺服電機(jī)驅(qū)動(dòng)機(jī)器人手臂的旋轉(zhuǎn)和伸縮,確保動(dòng)作精準(zhǔn)、穩(wěn)定。 2. 半導(dǎo)
2025-05-26 09:26:27984 : 1. 定義與功能 特性 單片機(jī)(Microcontroller) 伺服系統(tǒng)(Servo System) 定義 一種集成CPU、內(nèi)存、I/O接口的微型計(jì)算機(jī)芯片,用于控制設(shè)備。 一種由伺服電機(jī)、編碼器
2025-05-26 09:18:22664 背景介紹作為精密電機(jī),伺服電機(jī)被廣泛用于工業(yè)自動(dòng)化、手術(shù)機(jī)器人與CT等高精密設(shè)備上。鑒于其高可靠、高精密與緊湊要求,目前工業(yè)級(jí)的M12連接器便成為伺服電機(jī)常用的電氣化連接解決方案選擇。1LM12
2025-05-20 18:29:26653 伺服電機(jī)作為工業(yè)自動(dòng)化領(lǐng)域的核心執(zhí)行元件,其穩(wěn)定運(yùn)行直接關(guān)系到生產(chǎn)效率和設(shè)備安全。然而,過載燒毀問題卻成為困擾工程師的常見故障。通過分析多起典型案例發(fā)現(xiàn),超過60%的燒毀事故源于參數(shù)設(shè)置不當(dāng)。本文將
2025-05-20 07:44:021802 針對(duì)電機(jī)帶動(dòng)負(fù)載時(shí)出現(xiàn)轉(zhuǎn)速下降或堵轉(zhuǎn),導(dǎo)致電流增大的問題,通過理論分析與詳細(xì)檢查,確定原因?yàn)?b class="flag-6" style="color: red">電機(jī)的轉(zhuǎn)子在安裝時(shí)出現(xiàn)了定子軸向位移,導(dǎo)致電機(jī)磁通量減少,電磁轉(zhuǎn)矩下降,出現(xiàn)\"小馬拉大車”現(xiàn)象
2025-05-14 16:31:02
永磁交流伺服電機(jī)的編碼器相位為何要與轉(zhuǎn)子磁極相位對(duì)齊
其唯一目的就是要達(dá)成矢量控制的目標(biāo),使 d 軸勵(lì)磁分量和 q 軸出力分量解耦,令永磁交流伺服電機(jī)定子繞組產(chǎn)生的電磁場(chǎng)始終正交于轉(zhuǎn)子永磁場(chǎng),從而
2025-05-14 16:00:34
伺服電機(jī)作為工業(yè)自動(dòng)化領(lǐng)域的核心部件,其運(yùn)行狀態(tài)直接影響設(shè)備效率和生產(chǎn)線穩(wěn)定性。判斷伺服電機(jī)是否損壞需要結(jié)合多維度檢測(cè)方法,從基礎(chǔ)觀察、性能測(cè)試到專業(yè)診斷層層遞進(jìn)。以下為系統(tǒng)性判斷流程及實(shí)操要點(diǎn)
2025-05-12 17:21:203510 
系統(tǒng)分析造成伺服電機(jī)三相不平衡的六大根源,并提供針對(duì)性的解決方案,幫助工程師從源頭消除隱患。 一、電源質(zhì)量缺陷引發(fā)的相位失衡 電網(wǎng)電壓波動(dòng)是導(dǎo)致三相不平衡的首要因素。當(dāng)輸入電壓偏差超過額定值的±5%時(shí),電機(jī)繞組阻抗
2025-05-06 07:40:581546 
能發(fā)生嚴(yán)重的過電壓現(xiàn)象。這就要求研究分析電機(jī)發(fā)生瞬變過程時(shí)的各狀態(tài)量,了解瞬變過程所能產(chǎn)生的影響或后果,以改進(jìn)電機(jī)的設(shè)計(jì)方案及制造方案,并提出相應(yīng)的繼電保護(hù)方案。在自動(dòng)控制系統(tǒng)中,主要是研究系統(tǒng)中各元件及整個(gè)
2025-04-29 16:29:33
在石油化工、礦山開采、制藥生產(chǎn)等高風(fēng)險(xiǎn)行業(yè)中,設(shè)備的安全性和可靠性至關(guān)重要。一旦電機(jī)在易燃易爆環(huán)境中發(fā)生故障或火花,可能引發(fā)嚴(yán)重事故,造成巨大的經(jīng)濟(jì)損失和人員傷亡。派克Parker防爆伺服電機(jī)EX系列,正是為解決這一行業(yè)痛點(diǎn)而生,為高危領(lǐng)域提供安全、高效、穩(wěn)定的動(dòng)力解決方案。
2025-04-29 08:58:13561 
伺服電機(jī)的測(cè)試流程是確保電機(jī)正常工作的關(guān)鍵步驟。以下是對(duì)伺服電機(jī)測(cè)試流程的詳細(xì)分析。 ?一、初步檢查與準(zhǔn)備 1. 外觀檢查:首先,對(duì)伺服電機(jī)進(jìn)行外觀檢查,確保電機(jī)完好無損,沒有明顯的物理損傷或變形
2025-04-23 17:56:301247 伺服電機(jī)過熱故障是工業(yè)控制領(lǐng)域中常見的問題,為了有效應(yīng)對(duì)這一故障,可以采取以下措施: 一、檢查散熱系統(tǒng) ● 散熱風(fēng)扇與散熱片:首先檢查伺服電機(jī)的散熱風(fēng)扇和散熱片是否正常工作。散熱風(fēng)扇負(fù)責(zé)將電機(jī)
2025-04-23 17:04:051978 西門子伺服電機(jī)簡(jiǎn)明樣本
2025-04-14 15:36:19 2
2 安川伺服電機(jī)的靈活適配性,使其在汽車制造、電子裝配、物流分揀等領(lǐng)域大放異彩。作為工業(yè)自動(dòng)化領(lǐng)域的重要組成部分,安川伺服電機(jī)將繼續(xù)發(fā)揮其高精度、強(qiáng)勁動(dòng)力和高速轉(zhuǎn)動(dòng)的特點(diǎn),為各個(gè)行業(yè)的發(fā)展提供更加高效、智能的解決方案。
2025-04-10 13:38:281893 
在工業(yè)機(jī)器人精準(zhǔn)抓取的瞬間,在晶圓搬運(yùn)設(shè)備高速運(yùn)轉(zhuǎn)的毫秒間,傳統(tǒng)伺服電機(jī)外置線纜的干涉風(fēng)險(xiǎn)、笨重的體積限制,是否已成為制約設(shè)備性能的"阿喀琉斯之踵"?哈默納科HMA系列中空伺服電機(jī),以創(chuàng)新設(shè)計(jì)突破傳統(tǒng)結(jié)構(gòu)限制,為高端裝備提供兼具高功率密度與靈活性的驅(qū)動(dòng)解決方案。
2025-04-08 08:42:39782 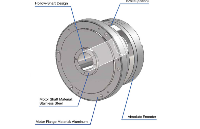
伺服電機(jī)的一些資料,純分享帖,需要者可點(diǎn)擊附件獲取完整資料~~~
(免責(zé)聲明:本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請(qǐng)第一時(shí)間告知,刪除內(nèi)容!)
2025-04-01 14:36:03
的部分觀點(diǎn),可能對(duì)您的企業(yè)規(guī)劃有一定的參考價(jià)值。點(diǎn)擊附件查看全文*附件:工業(yè)電機(jī)行業(yè)現(xiàn)狀及未來發(fā)展趨勢(shì)分析.doc
本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請(qǐng)第一時(shí)間告知,刪除內(nèi)容!
2025-03-31 14:35:19
伺服系統(tǒng)是指以位置、速度、轉(zhuǎn)矩為控制量,能夠動(dòng)態(tài)跟蹤目標(biāo)變化從而實(shí)現(xiàn)自動(dòng)化控制的系統(tǒng),主要包括伺服驅(qū)動(dòng)器、伺服電機(jī)和編碼器,是實(shí)現(xiàn)工業(yè)自動(dòng)化精密制造和柔性制造的核心技術(shù)。▲典型伺服系統(tǒng)組成結(jié)構(gòu)圖01
2025-03-27 17:45:581581 
這篇文章主要介紹了使用EtherCAN轉(zhuǎn)CANopen網(wǎng)關(guān)控制伺服電機(jī)的步驟,包括配置軟件、創(chuàng)建新工程、搜索設(shè)備、添加主站設(shè)備、導(dǎo)入EDS文件、添加從站設(shè)備、設(shè)置參數(shù)、生成和下載。文章最后介紹了在線監(jiān)控和I/O功能映射的功能。
2025-03-23 17:30:30672 
在永磁同步電機(jī)伺服系統(tǒng)電流、轉(zhuǎn)速控制中,通常采用的 PI 控制器與電流環(huán)、轉(zhuǎn)速環(huán)的穩(wěn)定性和動(dòng) 態(tài)性能緊密相關(guān) 。通過分析伺服系統(tǒng)的限制條件和參數(shù)特性,論述了電流環(huán)、轉(zhuǎn)速環(huán)控制指標(biāo)的設(shè)定原則,并 提出
2025-03-20 12:59:55
要將三菱伺服電機(jī)設(shè)置為無編碼器模式(也稱為開環(huán)控制模式),需要遵循一定的步驟和注意事項(xiàng)。以下是一個(gè)詳細(xì)的指南: 一、了解無編碼器模式 無編碼器模式是指伺服電機(jī)在沒有編碼器反饋信號(hào)的情況下,根據(jù)輸入
2025-03-20 07:41:441327 比爾公司 (ST?BER ANTRIEBSTECHNIKGmbH&Co.KG)決定開發(fā)出 新的三種不同尺寸的伺服電機(jī),在2.8到31牛頓米 的扭矩值有4個(gè)不同長度的版本。受益于其創(chuàng)新的電
2025-03-12 16:58:47
伺服電機(jī)編碼器的選型是一個(gè)綜合性的過程,需要考慮多個(gè)因素以確保所選編碼器能夠滿足系統(tǒng)的性能要求。以下是一些關(guān)鍵的選型步驟和考慮因素: 一、明確應(yīng)用需求 首先,需要明確伺服電機(jī)編碼器的應(yīng)用需求,包括
2025-03-11 12:01:041696 
伺服電機(jī)作為機(jī)器人運(yùn)動(dòng)控制的核心部件,其高精度、高響應(yīng)速度和高負(fù)載能力等特點(diǎn),為機(jī)器人的精確運(yùn)動(dòng)提供了有力保障。在工業(yè)機(jī)器人、醫(yī)療機(jī)器人、服務(wù)機(jī)器人等領(lǐng)域,伺服電機(jī)都有著廣泛的應(yīng)用。然而,隨著機(jī)器人
2025-03-07 16:38:541672 
使用OpenVINO?模型的 OpenCV* 進(jìn)行人臉檢測(cè)。
使用 cv2.矩形 函數(shù),能夠獲取檢測(cè)到的面部的坐標(biāo)。
檢測(cè)到多張人臉時(shí),多個(gè)坐標(biāo)被捕獲到,伺服電機(jī)和步入器電機(jī)都發(fā)生移動(dòng)。
2025-03-07 06:35:09
一、有刷電機(jī)結(jié)構(gòu)介紹無刷直流永磁電動(dòng)機(jī)廣泛地用于驅(qū)動(dòng)和伺服系統(tǒng)中,在許多場(chǎng)合,不但要求電動(dòng)機(jī)具 有良好地啟動(dòng)和調(diào)節(jié)特性,而且要求電機(jī)能夠正反轉(zhuǎn)。本篇文章,我們著重來分析下有刷 永磁直流電動(dòng)機(jī)地正反
2025-03-03 14:32:432 永磁交流伺服電機(jī)的編碼器相位為何要與轉(zhuǎn)子磁極相位對(duì)齊,其唯一目的就是要達(dá)成矢量控制的目標(biāo),使 d 軸勵(lì)磁分量和 q 軸出力分量解耦,令永磁交流伺服電機(jī)定子繞組產(chǎn)生的電磁場(chǎng)始終正交于轉(zhuǎn)子永磁場(chǎng),從而
2025-03-03 01:58:19
等方面進(jìn)行詳細(xì)分析,幫助您做出明智的選擇。 一、了解直流伺服電機(jī)的基本類型 直流伺服電機(jī)主要分為有刷直流伺服電機(jī)和無刷直流伺服電機(jī)兩大類。有刷直流伺服電機(jī)結(jié)構(gòu)簡(jiǎn)單,成本低,但維護(hù)頻率較高,因?yàn)樗⒆訒?huì)隨著時(shí)間磨
2025-02-27 12:04:241274 
伺服驅(qū)動(dòng)器是控制伺服電動(dòng)機(jī)的重要設(shè)備,廣泛應(yīng)用于數(shù)控機(jī)床、機(jī)器人、自動(dòng)化生產(chǎn)線等領(lǐng)域?。以下是關(guān)于伺服驅(qū)動(dòng)器的一些關(guān)鍵信息和常見故障及其解決方案: ?一、伺服驅(qū)動(dòng)器的基本功能? 伺服驅(qū)動(dòng)器接收
2025-02-22 10:51:19958 伺服驅(qū)動(dòng)器的主要作用是控制伺服電機(jī),實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位 ?。 伺服驅(qū)動(dòng)器,又稱為“伺服控制器”或“伺服放大器”,是現(xiàn)代運(yùn)動(dòng)控制的重要組成部分。它通過接收外部控制信號(hào),對(duì)伺服電機(jī)進(jìn)行精確的速度
2025-02-20 10:06:132912
工業(yè)機(jī)器人數(shù)控機(jī)床XY機(jī)械手雙軸機(jī)器人堆垛機(jī)專用雙軸伺服電機(jī)驅(qū)動(dòng)控制器48V 14ARMS帶有STO功能,隔離高壓CAN/RS485/USB通訊支持編碼器和霍爾輸入- TMCM-2611
雙伺服
2025-02-15 12:14:19
伺服電機(jī)是一種高精度、高響應(yīng)速度的電機(jī),廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人、航空航天等領(lǐng)域。在實(shí)際應(yīng)用中,有時(shí)需要改變電機(jī)的旋轉(zhuǎn)方向,以滿足不同的工作需求。本文將詳細(xì)介紹伺服電機(jī)改變方向的方法,包括
2025-02-12 11:07:522631 【電磁兼容技術(shù)案例分享】伺服控制器產(chǎn)品電機(jī)抖動(dòng)EMC自兼容問題案例
2025-02-11 09:40:25908 
無法滿足高精度、高效率的需求。這時(shí),交流伺服驅(qū)動(dòng)器應(yīng)運(yùn)而生,成為現(xiàn)代工業(yè)的“智能心臟”。什么是交流伺服驅(qū)動(dòng)器簡(jiǎn)單來說,交流伺服驅(qū)動(dòng)器是一種能夠精確控制電機(jī)速度、位
2025-02-08 15:04:321224 
一、起動(dòng)伺服電機(jī)前需做的工作有哪些 1)測(cè)量絕緣電阻(對(duì)低電壓電機(jī)不應(yīng)低于0.5M)。 2)測(cè)量電源電壓,檢查電機(jī)接線是否正確,電源電壓是否符合要求。 3)檢查起動(dòng)設(shè)備是否良好。 4)檢查熔斷器是否
2025-02-08 10:55:281263 ? ? ? 舵機(jī)和伺服電機(jī)在自動(dòng)化和機(jī)器人技術(shù)領(lǐng)域中都是常用的執(zhí)行器,它們都能夠?qū)崿F(xiàn)精確的位置控制,但二者之間存在一些基本的區(qū)別,具體如下: ? ? ? 一、定義與構(gòu)成 ? ? ? 1. 舵機(jī)
2025-02-07 07:37:411933 
? ? ? 絕對(duì)式編碼器在伺服電機(jī)控制中的應(yīng)用廣泛且重要,其優(yōu)勢(shì)顯著,以下是對(duì)其應(yīng)用與優(yōu)勢(shì)的詳細(xì)分析: ? ? ??一、絕對(duì)式編碼器在伺服電機(jī)控制中的應(yīng)用 ? ? ? 絕對(duì)式編碼器是一種常用的位置
2025-02-06 09:46:151722 
我使用AM26LS31芯片,將3.3V脈沖轉(zhuǎn)換為雙路脈沖,用于驅(qū)動(dòng)伺服電機(jī),伺服電機(jī)接收的脈沖數(shù)大于控制器實(shí)際發(fā)送的脈沖。我將AM26LS31的輸入腳直接接GND和3.3V時(shí),伺服電機(jī)也會(huì)接收到脈沖,請(qǐng)問工程師,這個(gè)問題用什么方法可以解決?
2025-01-23 07:32:39
電機(jī)控制器是現(xiàn)代工業(yè)自動(dòng)化和機(jī)器人技術(shù)中不可或缺的一部分。它們負(fù)責(zé)精確控制電機(jī)的速度、位置和力矩,以實(shí)現(xiàn)高效和精確的運(yùn)動(dòng)控制。 1. 硬件選擇 在開始編程之前,首先需要選擇合適的電機(jī)和驅(qū)動(dòng)器。常見
2025-01-22 09:37:161461 在自動(dòng)化控制系統(tǒng)中,電機(jī)控制器和伺服系統(tǒng)是實(shí)現(xiàn)精確運(yùn)動(dòng)控制的關(guān)鍵組件。電機(jī)控制器負(fù)責(zé)接收控制信號(hào)并驅(qū)動(dòng)電機(jī),而伺服系統(tǒng)則確保電機(jī)按照預(yù)定的軌跡和速度精確運(yùn)動(dòng)。 電機(jī)控制器的基本概念 電機(jī)控制器是一種
2025-01-22 09:35:461590 ? ? ? 在選擇搬運(yùn)機(jī)械手的電機(jī)時(shí),需要考慮多個(gè)因素以確保電機(jī)的性能滿足機(jī)械手的運(yùn)行需求。以下是一個(gè)詳細(xì)的案例分析,說明如何為搬運(yùn)機(jī)械手選擇合適的電機(jī)。 ? ? ? ? 一、電機(jī)類型選擇
2025-01-21 16:44:451590 
伺服電機(jī)編碼器故障及維修,伺服電機(jī)編碼器4大常見故障,編碼器信號(hào)丟失或不穩(wěn)定,編碼器零點(diǎn)偏移,編碼器過熱,編碼器機(jī)械損壞;伺服電機(jī)編碼器4大維修方法:在維修伺服電機(jī)編碼器時(shí),需要維修人員具備一定
2025-01-21 14:49:354296 
在現(xiàn)代工業(yè)自動(dòng)化和控制系統(tǒng)中,伺服電機(jī)編碼器扮演著至關(guān)重要的角色。它能夠精確測(cè)量電機(jī)的位置、速度和方向,為系統(tǒng)提供準(zhǔn)確的反饋信息,實(shí)現(xiàn)高精度的運(yùn)動(dòng)控制。伺服電機(jī)編碼器作為伺服系統(tǒng)中的關(guān)鍵部件,其性能和可靠性直接影響著整個(gè)系統(tǒng)的運(yùn)行效果。
2025-01-20 14:01:181821 伺服電機(jī)靜電防護(hù)完整方案 伺服電機(jī)是一種能夠?qū)㈦娔苻D(zhuǎn)換為機(jī)械能的裝置,通過接收控制信號(hào)來實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)速、轉(zhuǎn)向和位置的控制。它具有高精度、高速度和高效率的特點(diǎn),能夠?qū)㈦妷盒盘?hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速,以驅(qū)動(dòng)
2025-01-09 14:28:371192 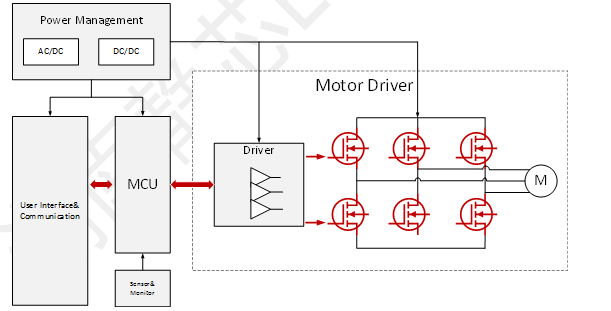
在自動(dòng)化和機(jī)器人技術(shù)領(lǐng)域,精確控制機(jī)械運(yùn)動(dòng)是至關(guān)重要的。舵機(jī)和伺服電機(jī)是兩種常用的執(zhí)行器,它們都能夠?qū)崿F(xiàn)精確的位置控制。盡管它們?cè)谀承?yīng)用中可以互換使用,但它們之間存在一些基本的區(qū)別,這些區(qū)別影響了
2025-01-08 17:39:212430 伺服電機(jī)滑環(huán)是一種用于電機(jī)與轉(zhuǎn)動(dòng)部分之間傳遞電信號(hào)和電力的裝置。它主要用于需要360度連續(xù)旋轉(zhuǎn)的系統(tǒng)中,能夠有效解決傳統(tǒng)電纜在旋轉(zhuǎn)過程中扭結(jié)、磨損的問題。
2025-01-06 09:36:181210 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論