 伺服電機增益詳解
伺服電機增益詳解

伺服電機增益調節是運動控制中的核心環節,直接影響系統的響應速度、穩定性和精度。本文將深入解析增益參數的作用機理、調節方法及典型應用場景,幫助工程師實現伺服系統的最佳性能匹配。
一、增益參數的基礎原理
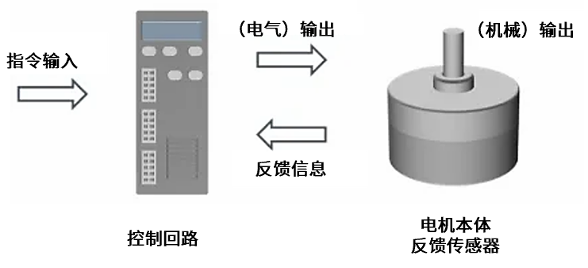
伺服系統通常包含位置環、速度環和電流環三環控制結構。位置環增益(Kp)決定系統對位置偏差的敏感度,其值越大,剛性越強,但過高會導致超調或振蕩;速度環增益(Kv)影響轉速跟蹤能力,適當提高可改善抗負載擾動特性;積分增益(Ki)則用于消除穩態誤差,但需注意積分飽和問題。現代伺服驅動器還引入前饋增益,通過預測控制減少相位滯后,如加速度前饋可提升高速運動時的軌跡精度。
二、增益調節的工程方法
1. 階躍響應法:通過觀察電機對階躍指令的響應曲線,逐步提高比例增益至出現輕微超調(約10%-15%),再調節積分時間消除余差。某工業機械臂案例顯示,將Kp從30增至45后,定位時間縮短40%,但需配合增加20%的速度前饋以抑制震蕩。
2. 頻域分析法:利用伯德圖測量系統相位裕度(建議45°-60°)和幅值裕度(>6dB)。某CNC機床測試表明,當速度環帶寬從50Hz提升到80Hz時,輪廓加工誤差降低62%,但需注意機械諧振點可能被激發。
3. 自適應調諧技術:如三菱MR-J4系列驅動器配備的免調試功能,通過自動施加變頻激勵信號識別負載慣量比,在1分鐘內完成增益自整定。實測數據顯示,對于5:1慣量變化的輸送線系統,自適應調節比手動調參效率提升70%。
三、典型問題解決方案
●機械諧振處理:當增益提高后出現高頻嘯叫時,可啟用陷波濾波器(Notch Filter)。某包裝設備案例中,設置中心頻率為120Hz、Q值為10的陷波器后,振動幅度降低90%。
●摩擦補償策略:對于低速爬行現象,STMicroelectronics的STSPIN32F0方案采用非線性摩擦補償算法,使0.1r/min時的速度波動從±15%降至±3%。
●多軸同步優化:電子齒輪箱應用中,主從軸間需動態調整增益匹配。EtherCAT總線系統通過分布式時鐘同步,可將多軸相位差控制在1μs以內。
四、前沿技術發展
1. AI調參系統:如西門子SINAMICS S200系列搭載的機器學習模塊,能根據歷史運行數據持續優化增益參數。某光伏板清洗機器人應用該技術后,能耗降低18%。
2. 數字孿生調試:Rockwell Automation的Emulate3D軟件可在虛擬環境中預調增益,某汽車焊接產線調試周期從2周縮短到3天。
3. 芯片級集成:TI的C2000實時微控制器集成硬件加速器,使PID運算周期縮短至500ns,支持更精細的增益控制。
五、選型與維護建議
●高動態場合優先選擇23位絕對值編碼器,分辨率達0.00007°,可支持更高增益設置
●定期檢查聯軸器剛性,0.1mm的軸偏差可能使有效增益下降30%
●環境溫度每升高10℃,建議重新校驗熱補償參數
通過深入理解增益參數間的耦合關系,結合先進調試工具和故障診斷方法,工程師能夠構建出兼具快速響應與穩定性的伺服系統。未來隨著邊緣計算和5G技術的普及,增益調節將向自適應化、網絡化方向發展,為智能裝備提供更強大的運動控制基礎。
-
伺服電機
+關注
關注
88文章
2184瀏覽量
61272
發布評論請先 登錄
PLC怎么控制多臺交流伺服電機達到同步工作

伺服電機的控制方式簡述

派克Parker防爆伺服電機與普通伺服電機的區別


三菱伺服電機抖動聲響的調整
舵機與伺服電機的區別是什么?
剛性、慣量、響應時間及伺服增益調整之間的關系
伺服電機中的回原點方式

什么是伺服電機編碼器?作用/關鍵技術/選型等一起看看吧!

伺服電機測試流程分析
如何應對伺服電機過熱故障?
安川伺服電機選型指南:直流or交流?詳解電機類型與特點

伺服電機編碼器怎么選型




 工商網監
工商網監
評論