線性伺服電機(jī)定位系統(tǒng)可以提供所需的平穩(wěn)運(yùn)行,但它們的代價(jià)是更高的功率和需求高分辨率編碼器和精密電路。另外,步進(jìn)電機(jī)具有多種吸引人的視頻監(jiān)控定位功能,包括靜止時(shí)的全扭矩,出色的啟動(dòng),停止和反向響應(yīng)時(shí)間,無誤差累積的運(yùn)動(dòng)重復(fù)性,以及固定步長的簡(jiǎn)單開環(huán)控制。
2019-02-26 08:35:00 4567
4567 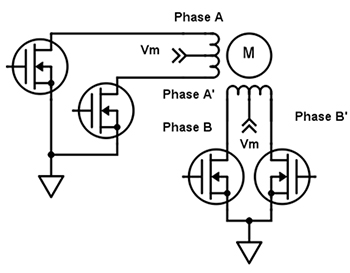
labview如何快速精確控制步進(jìn)電機(jī)實(shí)現(xiàn)定位運(yùn)動(dòng)
2022-08-26 11:12:496137 
在自動(dòng)化項(xiàng)目開發(fā)的過程中,進(jìn)行一些高精度的定位控制。選用伺服電機(jī)作為執(zhí)行器件可快速實(shí)現(xiàn)高精度控制系統(tǒng)的構(gòu)建。
2023-03-02 14:23:278438 
在自動(dòng)化設(shè)備和機(jī)器人技術(shù)中,定位指令是一種非常重要的控制手段。
2023-12-14 17:37:473534 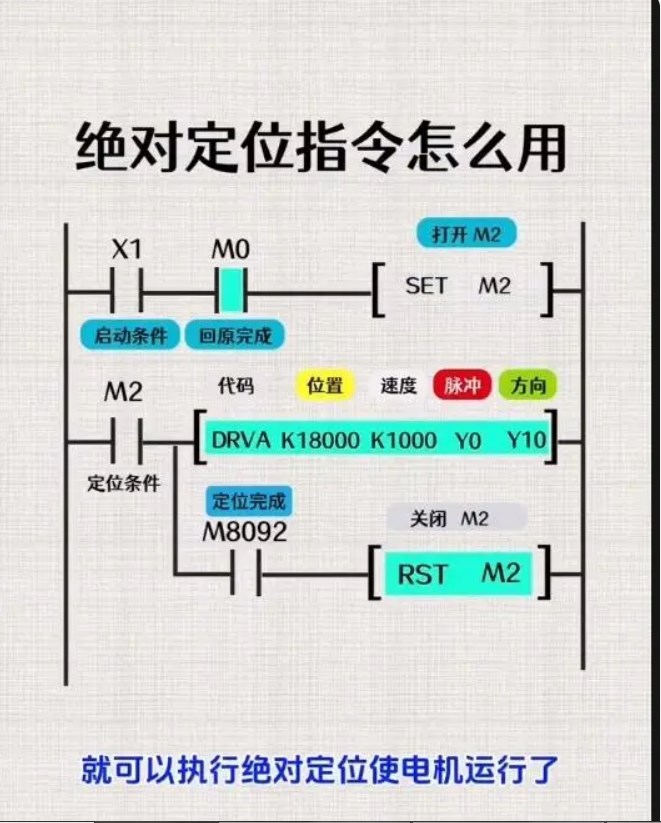
和實(shí)踐終于開發(fā)了一個(gè)FB塊,一個(gè)塊就可以實(shí)現(xiàn)伺服的上電,使能,相對(duì)定位,絕對(duì)定位,JOG運(yùn)行,回原控制(包括碰到極限反找原位功能),以及故障清除和伺服狀態(tài)顯示等功能。該塊核心是將西門子庫函數(shù)...
2021-07-05 06:26:57
伺服定位滑臺(tái),也稱直線模組、線性滑臺(tái)、單軸機(jī)械手、直角坐標(biāo)機(jī)器人等。是一種由各部分零件組合而成以完成相應(yīng)負(fù)載及給定方向及區(qū)域間運(yùn)動(dòng)的產(chǎn)品,可由電機(jī)控制完成區(qū)域內(nèi)的運(yùn)動(dòng),現(xiàn)已成為一種成熟的通用機(jī)械
2023-01-12 16:13:09
和輸出之比所解釋的技術(shù)術(shù)語,現(xiàn)在直接使用增益來表示。1.相對(duì)運(yùn)動(dòng):必需對(duì)位置值加以計(jì)算,點(diǎn)動(dòng)運(yùn)行、往返運(yùn)動(dòng)一定位置量的控制系統(tǒng)。2.絕對(duì)運(yùn)動(dòng):直接下達(dá)位置值,可用于XY軸、table等,一般的機(jī)械均可使用。于指令程序中較為簡(jiǎn)便。:干貨 | 伺服電機(jī)速度、位置、轉(zhuǎn)矩控制的比較
2018-10-11 10:29:54
(一)PLC是怎么控制伺服電機(jī)的?在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對(duì)伺服電機(jī)的位置控制。其實(shí),伺服
2021-09-06 06:00:20
定位系統(tǒng)中,應(yīng)用UWB技術(shù),會(huì)使人員定位更加精確,使工程項(xiàng)目人員管理變得簡(jiǎn)單。此外,由于它是以一種數(shù)學(xué)方式產(chǎn)生脈沖,并對(duì)脈沖產(chǎn)生調(diào)制,而這些電路都可以被集成到一個(gè)芯片上,這樣大大降低了設(shè)備成本,使得工程造價(jià)成本相對(duì)比較低。河北云酷科技編
2018-11-05 14:44:59
手段,給人們帶來了位置獲取、導(dǎo)航、測(cè)繪、預(yù)警等方便直觀的應(yīng)用。相對(duì)于以上集中定位技術(shù),UWB定位技術(shù)(Ultra WideBand)是室內(nèi)定位領(lǐng)域的一項(xiàng)新興技術(shù),與其他定位技術(shù)相比,它具有厘米級(jí)的超高
2021-09-10 16:34:56
西門子V90伺服用FB284塊的EPOS模式,回零完成后,一跑絕對(duì)定位就會(huì)丟失原點(diǎn)(Axisref變成False),沒有報(bào)警代碼。跑點(diǎn)動(dòng)則不會(huì)丟失原點(diǎn)。請(qǐng)問這種情況應(yīng)該怎么解決?
2023-06-12 16:49:37
uwb定位技術(shù)即超寬帶技術(shù),它是一種無載波通信技術(shù),利用納秒級(jí)的非正弦波窄脈沖傳輸數(shù)據(jù),因此其所占的頻譜范圍很寬。傳統(tǒng)的定位技術(shù)是根據(jù)信號(hào)強(qiáng)弱來判別物體位置,信號(hào)強(qiáng)弱受外界 影響較大,因此定位出
2021-08-10 16:25:52
新型的無線通信技術(shù)。該技術(shù)采用TOF測(cè)距,利用UWB定位技術(shù)測(cè)得定位標(biāo)簽相對(duì)于兩個(gè)不同定位錨點(diǎn)之間無線電信號(hào)傳播的到達(dá)時(shí)間差,從而得出定位標(biāo)簽相對(duì)于四組定位基站的距離差。UWB定位特點(diǎn):1.定位基站
2021-11-04 17:24:19
長期回收三菱伺服電機(jī),回收三菱伺服定位系統(tǒng),回收三菱伺服驅(qū)動(dòng)器,回收MR-J2S-20A/MR-J2S-100A,高價(jià)回收三菱伺服電機(jī)驅(qū)動(dòng)器,回收MR-K22KA+HA-LH22K2/22KW
2021-01-21 15:46:22
室內(nèi)定位是指人或物在室內(nèi)環(huán)境中的定位。與室外環(huán)境相比,室內(nèi)環(huán)境布局更為復(fù)雜和復(fù)雜,有更多的遮蔽物。因此,定位系統(tǒng)的精度和抗干擾性要求更高。縱觀目前室內(nèi)定位所用到的技術(shù),可以從定位精度上分為三大類
2019-02-20 17:48:04
什么是定位控制?定位控制系統(tǒng)由哪幾部分組成?三菱PLC定位控制功能有什么?什么是編碼器?有哪些類型?
2021-10-09 07:32:59
什么是TDOA定位技術(shù)?有什么實(shí)際應(yīng)用?
2019-08-09 07:07:18
機(jī)設(shè)計(jì),EZ 系列同步伺服電機(jī)在一個(gè)非常緊湊的的 形式下提供一個(gè)非常高的功率密度。同樣的由海德漢 公司新開發(fā)EBI1135緩沖電池式多圈絕對(duì)值旋轉(zhuǎn)編 碼器適用于該伺服電機(jī)的定位和速度控制。
全文
2025-03-12 16:58:47
無線傳感器網(wǎng)絡(luò)(Wireless SensorNetwork,WSN)中,節(jié)點(diǎn)定位是一項(xiàng)關(guān)鍵技術(shù),獲得節(jié)點(diǎn)的位置信息是無線傳感器網(wǎng)絡(luò)的基本要求。定位業(yè)務(wù)受到廣泛關(guān)注,對(duì)于軍用、民用、礦井以及火災(zāi)救援
2020-08-28 06:07:05
為什么使用UWB定位技術(shù)?首先,大多數(shù)的企業(yè)是對(duì)人員進(jìn)行室內(nèi)定位,而GPS定位屬于衛(wèi)星導(dǎo)航定位,更適用于室外定位。UWB定位是通過TDOA到達(dá)時(shí)間差的算法來實(shí)現(xiàn)人員定位的,有抗遮擋、抗干擾的優(yōu)點(diǎn),更
2018-12-21 10:58:43
畢設(shè)題目: 基于物聯(lián)網(wǎng)技術(shù)的室內(nèi)無線定位技術(shù)研究 ,可以用無線傳感器網(wǎng)絡(luò)定位來做么?
2016-05-18 22:35:13
伺服電機(jī)驅(qū)動(dòng)器的作用是什么?如何實(shí)現(xiàn)高精度且高定位來控制伺服電機(jī)?
2021-10-12 13:01:01
隨著移動(dòng)互聯(lián)網(wǎng)的發(fā)展和室內(nèi)位置技術(shù)的創(chuàng)新,室內(nèi)定位技術(shù)在今天市場(chǎng)需求下應(yīng)運(yùn)而生。除了滿足基本的室內(nèi)定位需求外,基于室內(nèi)定位的技術(shù)進(jìn)步,為給其他行業(yè)發(fā)展帶來突破性的改變。室內(nèi)定位技術(shù)不同場(chǎng)景技術(shù)
2018-12-19 10:56:48
第一章導(dǎo)航定位技術(shù)分類 1. 定位技術(shù)分類1.1 基于相對(duì)測(cè)量的定位(航位推算)1.2 基于絕對(duì)測(cè)量的定位1.3 組合定位1. 定位技術(shù)分類 1.1 基于相對(duì)測(cè)量的定位(航位推算) (1)輪式里程計(jì)
2021-09-01 07:15:25
位置控制與速度控制的區(qū)別是什么?怎么實(shí)現(xiàn)電機(jī)快速準(zhǔn)確地轉(zhuǎn)動(dòng)到指定位置?
2021-10-19 07:56:03
TPMS技術(shù)及輪胎定位原理是什么?如何解決TPMS輪胎換位和調(diào)換輪胎時(shí)的重新定位問題?怎么實(shí)現(xiàn)外置編碼存儲(chǔ)器輪胎定位技術(shù)?
2021-05-14 06:13:50
如題無刷電機(jī)做位置伺服控制:無刷直流電機(jī)的極對(duì)數(shù)為1對(duì),電機(jī)的旋轉(zhuǎn)精度是不是正負(fù)60度。如果想要提高定位精度是不是選用極對(duì)數(shù)高的無刷機(jī)做位置伺服控制
2015-11-10 21:29:08
最近使用V90伺服,用Smart ST60控制V90走絕對(duì)定位控制,請(qǐng)問一下,怎么調(diào)整伺服加減速時(shí)間,以及伺服剛性。
V90伺服嘗試過啟用一鍵自動(dòng)優(yōu)化功能,但是機(jī)械行程有點(diǎn)短,經(jīng)常碰觸到正負(fù)限位造成優(yōu)化失敗,目前想通過面板手動(dòng)調(diào)試參數(shù),請(qǐng)問一下需要調(diào)整那些參數(shù)。謝謝!
2023-11-06 08:21:53
直線電機(jī)定位精度和重復(fù)定位精度,直線電機(jī)模組通常用于自動(dòng)化機(jī)械和設(shè)備上,因此我們必須嚴(yán)格控制精度的變化,并始終進(jìn)行精度測(cè)量。但是,精度測(cè)量的原理是什么?您對(duì)定位精度了解多少?讓我們帶大家一起學(xué)習(xí)!一
2021-07-12 06:56:34
什么是移動(dòng)定位技術(shù)?什么是室內(nèi)定位技術(shù)?
2021-05-19 06:21:31
該FB塊一個(gè)塊就可以實(shí)現(xiàn)伺服的上電,使能,相對(duì)定位,絕對(duì)定位,JOG運(yùn)行,回原控制(包括碰到極限反找原位功能),以及故障清除和伺服狀態(tài)顯示等功能。該塊核心是將西門子庫motion Control中
2021-06-28 06:21:17
藍(lán)牙定位技術(shù)的工作原理是什么?藍(lán)牙定位技術(shù)的定位方式有哪幾種?藍(lán)牙定位技術(shù)有哪些定位優(yōu)勢(shì)?
2021-06-28 08:14:00
室內(nèi)定位行業(yè)能夠發(fā)展迅速,市場(chǎng)規(guī)模能夠快速擴(kuò)張,都與定位技術(shù)的多樣化密切相關(guān)。常見的室內(nèi)定位技術(shù)有藍(lán)牙定位技術(shù)、WiFi定位技術(shù)、UWB(超寬帶)定位技術(shù)、ZigBee定位技術(shù)、視覺定位等。
2019-09-11 11:51:32
西門子伺服電機(jī),西門子S120驅(qū)動(dòng)。整個(gè)系統(tǒng)8個(gè)伺服電機(jī)。其中一個(gè)伺服電機(jī)是通過同步帶驅(qū)動(dòng)平臺(tái)做直線往復(fù)運(yùn)動(dòng),全程共三個(gè)定位點(diǎn)。運(yùn)行N次后出現(xiàn)位置偏差,重新校正后定位是準(zhǔn)確的,在運(yùn)行一段時(shí)間后又
2024-01-09 07:55:37
伺服電機(jī)與步進(jìn)電機(jī)定位精度上哪個(gè)更精確些?在使用上哪個(gè)操作比較簡(jiǎn)單些
2023-12-12 08:07:14
請(qǐng)問如何使用三菱伺服電機(jī)實(shí)現(xiàn)定位功能?
2021-09-26 07:03:54
的安全管理提升有著極其重要的作用。在醫(yī)院、養(yǎng)老院、商場(chǎng)等領(lǐng)域,UWB相對(duì)高昂的建設(shè)成本就不是很好的選擇。此類場(chǎng)景更多的是Wi-Fi、藍(lán)牙定位技術(shù)的領(lǐng)域,此類場(chǎng)景面對(duì)的是普通市民,找到一個(gè)地點(diǎn)的重要性要遠(yuǎn)遠(yuǎn)
2021-07-05 17:07:10
帶技術(shù)是一種脈沖無線電技術(shù),它與傳統(tǒng)的通信技術(shù)有很大差異,它不是利用載波信號(hào)來傳輸數(shù)據(jù),而是通過收發(fā)信機(jī)之間的納秒級(jí)極短脈沖來完成數(shù)據(jù)的傳輸。FCC將超寬帶信號(hào)定義為任何相對(duì)帶寬不小于20%或者絕對(duì)帶寬
2018-12-21 13:52:59
先進(jìn)的VRM(Variable Reluctant Motor)技術(shù),使控制精度更高。采用線性光柵尺將貼片頭的位置進(jìn)行反饋,可靠性高,沒有機(jī)械磨損。 2.伺服定位系統(tǒng) 高精度貼片機(jī)的定位系統(tǒng)
2018-09-03 10:06:14
本文旨在闡述利用PLC控制伺服電機(jī)實(shí)現(xiàn)準(zhǔn)確定位的方法,介紹控制系統(tǒng)在設(shè)計(jì)與實(shí)施中需要認(rèn)識(shí)與解決的若干問題,給出了控制系統(tǒng)參考方案及軟硬件結(jié)構(gòu)的設(shè)計(jì)思路,對(duì)于工業(yè)生產(chǎn)中
2011-07-12 11:05:3695783 
基于模糊PID控制的步進(jìn)電機(jī)定位系統(tǒng)-2005。
2016-04-05 16:31:30 25
25 交流電機(jī)定位控制的復(fù)合制動(dòng)方法,下來看看
2016-04-25 10:00:276 伺服電機(jī)(servo motor )是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。本文檔內(nèi)容介紹基于伺服電機(jī)的定位裝置的設(shè)計(jì)及應(yīng)用。
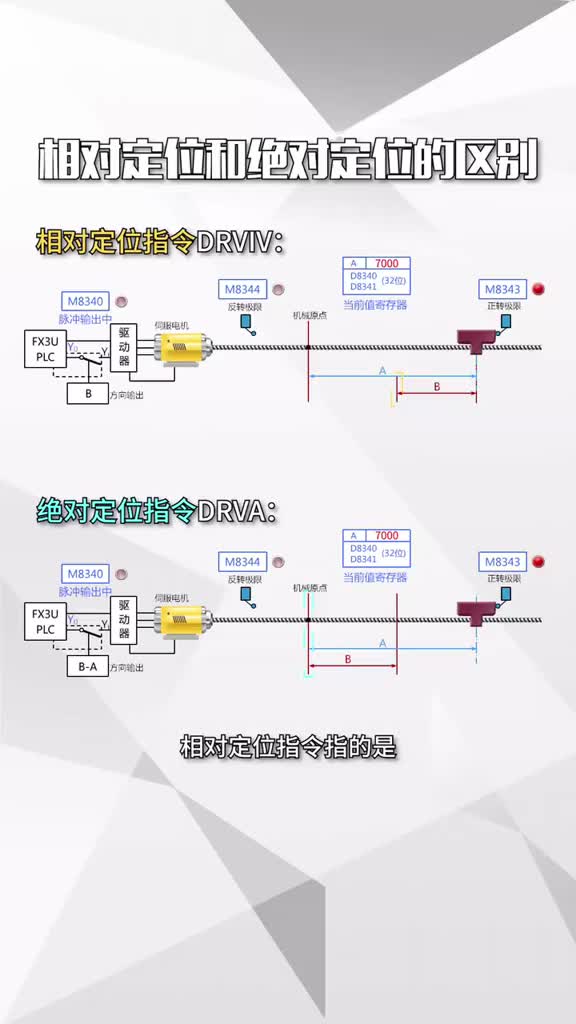
2017-09-22 16:55:238 由PLC與伺服電機(jī)組成一個(gè)系統(tǒng),通過PLC控制伺服電機(jī),實(shí)現(xiàn)機(jī)構(gòu)的原點(diǎn)回歸、相對(duì)定位和絕對(duì)定位功能
2017-11-13 06:01:0033478 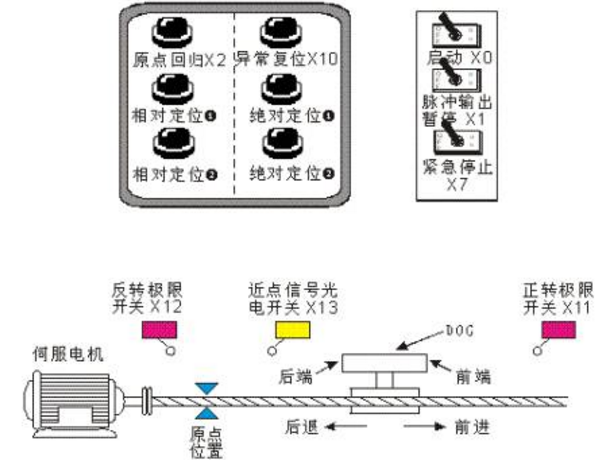
臺(tái)達(dá)伺服定位控制案例臺(tái)達(dá)伺服定位控制案例臺(tái)達(dá)伺服定位控制案例
2018-01-03 15:46:4129 伺服定位控制可以在PLC中實(shí)現(xiàn),也可以在伺服控制器中實(shí)現(xiàn)。用PLC實(shí)現(xiàn),可選用317-T的工藝型CPU,內(nèi)置定位控制功能。PLC通過通訊向伺服發(fā)送速度指令,并將伺服的反饋取到PLC中,在PLC中實(shí)現(xiàn)
2018-02-01 15:17:0411613 一般來說,伺服電機(jī)的編碼器有兩種,絕對(duì)值編碼器和相對(duì)值編碼器。絕對(duì)值編碼器斷電可以保持,只要電池還有電,是不需要尋原點(diǎn)的;相對(duì)編碼器由于斷電后會(huì)丟失電機(jī)多圈數(shù)值,故需要尋原點(diǎn)操作。
2018-02-05 09:09:3425742 伺服電機(jī)最主要的應(yīng)用還是定位控制,位置控制有兩個(gè)物理量需要控制,那就是速度和位置,確切的說,就是控制伺服電機(jī)以多快的速度到達(dá)什么地方,并準(zhǔn)確的停下。
2018-07-23 14:55:003277 相對(duì)于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對(duì)伺服電機(jī)的位置控制。
2018-08-12 10:34:076662 日本富士伺服電機(jī)絕對(duì)定位和相對(duì)定位 日本富士伺服電機(jī)是廣泛應(yīng)用于自動(dòng)化生產(chǎn)行業(yè)中的一種設(shè)備產(chǎn)品,通過深圳日本伺服電機(jī)可使控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。但是
2020-06-12 15:01:573187 伺服電機(jī)是如何實(shí)現(xiàn)精準(zhǔn)定位?如何理解它的閉環(huán)特性?今天我們就來說說。
2019-03-01 08:49:3117886 
通過PLC給伺服驅(qū)動(dòng)器發(fā)驅(qū)動(dòng)脈沖,通過改變脈沖頻率來控制移動(dòng)速度,通過改變脈沖數(shù)量來改變移動(dòng)量,控制步進(jìn)電機(jī)移動(dòng)方向。
伺服驅(qū)動(dòng)器是執(zhí)行機(jī)構(gòu),在接收到PLC發(fā)來的信號(hào),控制電機(jī)來運(yùn)動(dòng),通過位置編碼器精準(zhǔn)定位。
2019-06-30 10:15:3647043 
伺服電機(jī)控制器是數(shù)控系統(tǒng)及其他相關(guān)機(jī)械控制領(lǐng)域的關(guān)鍵器件,一般是通過位置、速度和力矩三種方式對(duì)伺服馬達(dá)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位。
2019-07-26 14:35:4315806 伺服電機(jī)控制器是數(shù)控系統(tǒng)及其他相關(guān)機(jī)械控制領(lǐng)域的關(guān)鍵器件,一般是通過位置、速度和力矩三種方式對(duì)伺服馬達(dá)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位。 伺服控制相關(guān)技術(shù)已經(jīng)成為關(guān)系國家裝備技術(shù)水平的重要參考。
2019-10-01 09:28:005459 用于車輛相對(duì)定位的測(cè)距傳感器和技術(shù)可以概括為下圖,首先分為兩大類:非協(xié)作式定位和協(xié)作式定位。非協(xié)作式定位包括:雷達(dá)、激光掃描儀、視覺和TOF攝像機(jī);協(xié)作式定位包括:基于轉(zhuǎn)發(fā)器的測(cè)距(根據(jù)射頻信號(hào)直接
2020-05-04 17:15:003913 伺服電機(jī)定位原理很簡(jiǎn)單,電機(jī)旋轉(zhuǎn)帶動(dòng)絲桿轉(zhuǎn)換把旋轉(zhuǎn)量轉(zhuǎn)換成平移量,脈沖的數(shù)量就是移動(dòng)的距離,我們只要知道脈沖情況就能計(jì)算出位置信息。
2020-06-25 18:14:005908 
伺服的基本概念是準(zhǔn)確、精確、快速定位。變頻是伺服控制的一個(gè)必須的內(nèi)部環(huán)節(jié),伺服驅(qū)動(dòng)器中同樣存在變頻(要進(jìn)行無級(jí)調(diào)速)。
但伺服將電流環(huán)速度環(huán)或者位置環(huán)都閉合進(jìn)行控制,這是很大的區(qū)別。除此外,伺服
2022-02-10 16:29:009741 
伺服電機(jī)靠脈沖來定位,伺服電機(jī)接收到1個(gè)脈沖,就會(huì)旋轉(zhuǎn)1個(gè)脈沖對(duì)應(yīng)的角度。電機(jī)每旋轉(zhuǎn)一個(gè)角度,編碼器都會(huì)發(fā)出對(duì)應(yīng)數(shù)量的反饋脈沖,反饋脈沖和伺服驅(qū)動(dòng)器接收的脈沖形成閉環(huán)控制,這樣伺服驅(qū)動(dòng)器就能夠很精確的控制電機(jī)的轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)精確的定位。
2022-10-19 08:58:383071 在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的伺服控制,其實(shí)就是對(duì)伺服電機(jī)的位置控制。 其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-04-27 17:34:352497 
在使用伺服的定位功能是,通常會(huì)有多個(gè)不同的定位地址,常用的處理方法是只寫一個(gè)定位指令,然后把地址數(shù)據(jù)做成參數(shù),每次要用時(shí)先傳輸定位參數(shù),下面給出調(diào)用地址參數(shù)的示例01
2023-05-23 10:03:251624 
PLC控制伺服到底需要哪些信號(hào)就可以實(shí)現(xiàn)定位控制了?下面給大家分享兩種控制。
2023-06-06 09:49:001623 
使用博途組態(tài)向?qū)В?b class="flag-6" style="color: red">定位的工藝對(duì)象后,利用定位相關(guān)指令,即可進(jìn)行相關(guān)操作,相關(guān)指令軸啟用,回原點(diǎn),點(diǎn)動(dòng),絕對(duì)定位,相對(duì)定位,復(fù)位,暫停等。
2023-06-25 11:39:5712435 
電子發(fā)燒友網(wǎng)站提供《伺服電機(jī)定位校準(zhǔn)方法教程.zip》資料免費(fèi)下載
2023-06-28 11:03:461 在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對(duì)伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-08-09 09:25:281596 PLC控制伺服到底需要哪些信號(hào)就可以實(shí)現(xiàn)定位控制了?下面給大家分享兩種控制。
2023-08-11 10:20:53939 
在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對(duì)伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-09-08 11:22:482266 RA Flash地址絕對(duì)定位
2023-10-26 18:24:111479 
水下GPS定位技術(shù)集水聲定位、衛(wèi)星導(dǎo)航定位、高精度時(shí)鐘和水下通訊等技術(shù)于一體,實(shí)現(xiàn)海上測(cè)量點(diǎn)(浮標(biāo))位置的精確定位“,既解決了傳統(tǒng)水聲定位技術(shù)無法獲得目標(biāo)絕對(duì)坐標(biāo)的難題,又使廣泛應(yīng)用于地面和海面的GPS定位技術(shù)能夠進(jìn)行水下目標(biāo)定位,在解決水下目標(biāo)絕對(duì)定位問題中有良好的應(yīng)用前景。
2023-10-19 15:39:480 伺服電機(jī)重要的應(yīng)用是定位控制。位置控制有兩個(gè)需要控制的物理量,即速度和位置。準(zhǔn)確地說,是控制伺服電機(jī)到達(dá)位置的速度和停止的速度。
2023-11-06 10:29:182085 伺服位置誤差大的原因及解決方法 伺服電機(jī)是一種精密控制裝置,可以實(shí)現(xiàn)高精度、高穩(wěn)定性的位置控制。然而,伺服電機(jī)在使用過程中常常出現(xiàn)定位誤差過大的問題。本文將從機(jī)械結(jié)構(gòu)、控制系統(tǒng)、環(huán)境因素、測(cè)量誤差
2023-12-25 13:57:529863 在當(dāng)今快節(jié)奏的技術(shù)驅(qū)動(dòng)環(huán)境中,人們期望獲得準(zhǔn)確的信息。當(dāng)需要從所在位置導(dǎo)航到另一個(gè)位置時(shí),人們希望獲得的路線規(guī)劃是基于當(dāng)前的位置,而不是兩個(gè)街區(qū)之外的位置。如今,無論是車輛導(dǎo)航系統(tǒng)還是共享出行等各種應(yīng)用,準(zhǔn)確的定位數(shù)據(jù)都至關(guān)重要。然而,實(shí)現(xiàn)準(zhǔn)確定位并不簡(jiǎn)單,尤其是需要考慮到這些車輛或設(shè)備所處的多變環(huán)境。
2024-01-10 13:31:132840 一個(gè)角度,都會(huì)發(fā)出對(duì)應(yīng)數(shù)量的脈沖,這樣,和伺服電機(jī)接受的脈沖形成了呼應(yīng),或者叫閉環(huán),如此一來,系統(tǒng)就會(huì)知道發(fā)了多少脈沖給伺服電機(jī),同時(shí)又收了多少脈沖回來,這樣,就能夠很精確的控制電機(jī)的轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)精確的定位
2024-02-20 13:53:091817 
伺服脈沖控制方式通過高速脈沖信號(hào)對(duì)伺服電機(jī)進(jìn)行精確控制,能夠?qū)崿F(xiàn)高精度的定位和速度調(diào)節(jié),提高生產(chǎn)效率和產(chǎn)品質(zhì)量。
2024-01-18 14:36:062692 ,這樣,和伺服電機(jī)接受的脈沖形成了呼應(yīng),或者叫閉環(huán),如此一來,系統(tǒng)就會(huì)知道發(fā)了多少脈沖給伺服電機(jī),同時(shí)又收了多少脈沖回來,這樣,就能夠很精確的控制電機(jī)的轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)精確的定位,可以達(dá)到0.001mm。
2024-01-20 09:44:561971 伺服脈沖控制方式通過高速脈沖信號(hào)對(duì)伺服電機(jī)進(jìn)行精確控制,能夠?qū)崿F(xiàn)高精度的定位和速度調(diào)節(jié),提高生產(chǎn)效率和產(chǎn)品質(zhì)量。
2024-01-22 09:34:532682 伺服電機(jī)驅(qū)動(dòng)器是現(xiàn)代工業(yè)控制領(lǐng)域中廣泛應(yīng)用的一種設(shè)備。通過合理設(shè)置參數(shù),可以實(shí)現(xiàn)電機(jī)的高精度定位、速度控制和力矩控制等功能,提高生產(chǎn)效率和產(chǎn)品質(zhì)量。本文將詳細(xì)介紹伺服電機(jī)驅(qū)動(dòng)器的設(shè)置參數(shù)方法和步驟
2024-01-25 11:36:2213619 什么是絕對(duì)脈沖和相對(duì)脈沖?有沒有PLC控制伺服電機(jī)的程序? 絕對(duì)脈沖和相對(duì)脈沖是在運(yùn)動(dòng)控制系統(tǒng)中用于編碼位置信息的兩種常見方式。 絕對(duì)脈沖是根據(jù)運(yùn)動(dòng)軸的實(shí)際位置而生成的脈沖信號(hào)。它提供了運(yùn)動(dòng)軸當(dāng)前
2024-02-05 17:39:473066 請(qǐng)教伺服電機(jī)絕對(duì)定位和相對(duì)定位問題? 伺服電機(jī)是一種能夠根據(jù)輸入信號(hào)精確控制位置、速度和扭矩的電機(jī)。它在自動(dòng)化的工業(yè)領(lǐng)域得到廣泛應(yīng)用,數(shù)據(jù)中心、機(jī)器人、醫(yī)療設(shè)備等都離不開伺服電機(jī)的運(yùn)動(dòng)控制。而伺服
2024-02-05 17:39:502520 是絕對(duì)定位,另一種是相對(duì)定位。本文將詳細(xì)介紹伺服電機(jī)的絕對(duì)定位和相對(duì)定位方法,并探討其適用場(chǎng)景和特點(diǎn)。 ? ? ??絕對(duì)定位 ? ? ??絕對(duì)定位是指在伺服電機(jī)初始化之前,電機(jī)控制器需要準(zhǔn)確地知道電機(jī)的當(dāng)前位置,這樣才能通過控
2024-03-18 08:39:446018 
伺服的基本概念是準(zhǔn)確、精確、快速定位。變頻是伺服控制的一個(gè)必須的內(nèi)部環(huán)節(jié),伺服驅(qū)動(dòng)器中同樣存在變頻(要進(jìn)行無級(jí)調(diào)速)。 但伺服將電流環(huán)速度環(huán)或者位置環(huán)都閉合進(jìn)行控制,這是很大的區(qū)別。除此外,伺服電機(jī)
2024-04-13 08:42:531592 GPS定位技術(shù)是一種基于衛(wèi)星定位系統(tǒng)的全球定位技術(shù),其主要優(yōu)勢(shì)在于可以覆蓋全球范圍,并且能夠提供相對(duì)較為精確的定位信息,一般達(dá)到米級(jí)或十米級(jí)的精度。GPS模塊適用于室外環(huán)境,如車輛導(dǎo)航、航空航海、戶外運(yùn)動(dòng)等領(lǐng)域。
2024-04-24 16:52:413501 
PLC的伺服定位控制進(jìn)行詳細(xì)的介紹,包括其基本原理、實(shí)現(xiàn)方法、參數(shù)設(shè)置以及應(yīng)用案例等方面,旨在為相關(guān)技術(shù)人員提供參考和借鑒。
2024-06-18 09:26:454914 在現(xiàn)代工業(yè)自動(dòng)化系統(tǒng)中,伺服電機(jī)與PLC(可編程邏輯控制器)的協(xié)同控制是實(shí)現(xiàn)高精度、高效率運(yùn)動(dòng)控制的關(guān)鍵技術(shù)。伺服電機(jī)以其高精度、高響應(yīng)速度的特點(diǎn),在定位、速度控制等方面表現(xiàn)出色;而PLC則以其強(qiáng)大
2024-06-24 14:30:453171 控制系統(tǒng)的主要作用是實(shí)現(xiàn)對(duì)電機(jī)的精確控制,包括位置、速度和加速度的控制。具體來說,它可以實(shí)現(xiàn)以下幾個(gè)方面的作用: 1.1 精確控制位置 步進(jìn)電機(jī)伺服控制系統(tǒng)可以實(shí)現(xiàn)對(duì)電機(jī)軸的精確定位,精度可以達(dá)到微米甚至納米級(jí)別。
2024-09-04 09:46:121709 控制對(duì)象。伺服電機(jī)的主要特點(diǎn)和作用如下: 高精度定位 :伺服電機(jī)具有極高的位置精度,能夠?qū)崿F(xiàn)對(duì)機(jī)械部件的精確控制。其內(nèi)部的編碼器能夠反饋電機(jī)的旋轉(zhuǎn)位置和速度信息,為控制系統(tǒng)提供精確的反饋信息,從而實(shí)現(xiàn)高精度的定位和運(yùn)動(dòng)控制
2024-10-22 16:16:152909 ? ? ? 絕對(duì)式編碼器在伺服電機(jī)控制中的應(yīng)用廣泛且重要,其優(yōu)勢(shì)顯著,以下是對(duì)其應(yīng)用與優(yōu)勢(shì)的詳細(xì)分析: ? ? ??一、絕對(duì)式編碼器在伺服電機(jī)控制中的應(yīng)用 ? ? ? 絕對(duì)式編碼器是一種常用的位置
2025-02-06 09:46:151730 
在工業(yè)自動(dòng)化的浪潮中,伺服系統(tǒng)的定位精度就像是一把精準(zhǔn)的手術(shù)刀,決定著生產(chǎn)的質(zhì)量和效率。而多摩川 17 位絕對(duì)式編碼器,無疑是這把手術(shù)刀上最為鋒利的刃口,它實(shí)現(xiàn)了伺服系統(tǒng)納米級(jí)的定位精度,為工業(yè)生產(chǎn)帶來了質(zhì)的飛躍
2025-07-16 16:28:581005 
大家在運(yùn)動(dòng)控制的時(shí)候是用伺服電機(jī)的還是用步進(jìn)電機(jī)做定位控制了?為什么有時(shí)候用伺服電機(jī),有時(shí)候又步進(jìn)電機(jī)?這是什么原因呢?本期我們就一起來探討一下步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別!
2025-10-15 14:32:511498 
GPS定位和地磁定位是兩種原理完全不同、應(yīng)用場(chǎng)景也差異巨大的技術(shù)。簡(jiǎn)單來說:GPS定位是絕對(duì)定位,告訴你“你在世界的哪個(gè)經(jīng)緯度”。地磁定位是相對(duì)定位,告訴你“你在哪個(gè)已知的室內(nèi)位置附近”。下面我們從
2025-11-19 12:01:53270 
伺服電機(jī)作為自動(dòng)化控制系統(tǒng)的核心執(zhí)行元件,其控制方式直接決定了設(shè)備的動(dòng)態(tài)響應(yīng)、定位精度和運(yùn)行效率。隨著工業(yè)4.0和智能制造的發(fā)展,伺服控制技術(shù)已從傳統(tǒng)的模擬量控制演變?yōu)閿?shù)字化、網(wǎng)絡(luò)化的智能控制體系
2025-12-01 07:37:18439 
在泡沫起升儀的沖程控制中,毫米級(jí)定位精度是保障泡沫輸出穩(wěn)定性、作業(yè)位置準(zhǔn)確性的關(guān)鍵。步進(jìn)伺服電機(jī)細(xì)分驅(qū)動(dòng)技術(shù)作為核心電子方案,通過優(yōu)化電機(jī)運(yùn)行的控制邏輯,將電機(jī)的運(yùn)動(dòng)分解為更精細(xì)的單元,從而實(shí)現(xiàn)沖程
2025-12-04 09:20:40238 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論