PLC與伺服驅動器的編程接線方法。伺服控制系統的使用方法其實跟變頻器類似,它的作用類似于變頻器應用于普通的交流馬達,也是屬于PLC伺服控制系統的一部分,主要應用于高精度的定位系統,在這里需要注意的是伺服驅動器方面如何去正確接線。
2022-10-21 09:14:33 4661
4661 FX3G · FX3U · FX3GC · FX3UC可編程控制器可以向伺服電機、 步進電機等輸出脈沖信號, 從而進行定位控制。脈沖頻率高的時候, 電機轉得快;脈沖數多的時候, 電機轉得多。
2022-11-21 11:47:412750 在自動化項目開發的過程中,進行一些高精度的定位控制。選用伺服電機作為執行器件可快速實現高精度控制系統的構建。
2023-03-02 14:23:278438 
如果我們用的是PLC脈沖輸出方式的集電極開路這種方式控制伺服電機,那么我們必須要有脈沖信號和方向信號這兩個基本信號
2023-03-07 10:01:432106 以三菱PLC控制伺服馬達為例,具體分享一下伺服馬達控制步驟。
2023-04-11 09:08:384530 1200PLC控制伺服電機沒有原點傳感器可以回零嗎?
2023-03-30 16:40:53
51單片機就可以控制人機界面了---實現儀表盤采用了TFT80480RS050BN彩色液晶屏模塊。
2013-11-20 19:51:26
為什么PLC可以取代傳統的繼電器+接觸器控制呢?PLC到底是怎么替代傳統的繼電器控制和接觸器控制系統的?
2021-08-27 08:00:31
的個數來確定轉動的角度,也有些伺服可以通過通訊方式直接對速度和位移進行賦值。 由于位置模式可以對速度和位置都有很嚴格的控制,所以一般應用于定位裝置。 3、速度模式 通過模擬量的輸入或脈沖的頻率都可以進行
2019-10-27 08:00:00
PLC控制伺服的原理是什么?PLC控制伺服的模式有哪幾種?
2021-10-11 08:45:46
PLC是如何控制伺服電機:通過發送的脈沖
2021-02-04 06:04:22
(一)PLC是怎么控制伺服電機的?在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服
2021-09-06 06:00:20
PLC步進電機指令可以控制伺服電機么? 也就是步進電機指令和伺服電機指令有區別嗎?
2023-03-30 17:34:11
PLC步進電機指令可以控制伺服電機么? 也就是步進電機指令和伺服電機指令有區別嗎?
2023-03-30 17:34:10
PLC的PID控制怎么實現閉環控制?在程序中采用PID調節指令就可以了嗎,是不是伺服電機走長了,可用PID調整那這輸入誤差怎么得到?比如說輸出與輸入誤差積分成正比,是不是如果有誤差,PLC就會算出這個值,然后在輸出值上面加上去或減掉???
2023-03-30 17:18:02
plc控制伺服電機的下位機系統有什么程序?伺服電機的控制方式包括哪幾種?plc控制伺服電機的上位機系統有什么功能?
2021-06-28 07:14:41
伺服驅動器按照其控制對象由外到內分為位置環、速度環和電流環,相應伺服驅動器也就可以工作在位置控制模式、速度控制模式和力矩控制模式。
2019-11-05 09:01:59
為什么用PLC控制伺服控制器一給使能電機就轉(此時PLC還沒運行呢),控制器和電機都已經測試好了
2023-12-11 07:00:33
USS是什么意思?USS通信與串口通信區別在什么地方?運動控制器PLC的結構是如何構成的?什么是伺服驅動器 ?
2021-06-28 08:03:17
什么是定位控制?定位控制系統由哪幾部分組成?三菱PLC定位控制功能有什么?什么是編碼器?有哪些類型?
2021-10-09 07:32:59
在s7-200+smart+plc伺服控制系統中高速脈沖輸出口可以任選擇對嗎?
2023-03-30 13:59:09
如何實現通過網線就可以進行文件的傳輸以及控制臺控制?
2021-10-25 07:05:26
伺服電機驅動器的作用是什么?如何實現高精度且高定位來控制伺服電機?
2021-10-12 13:01:01
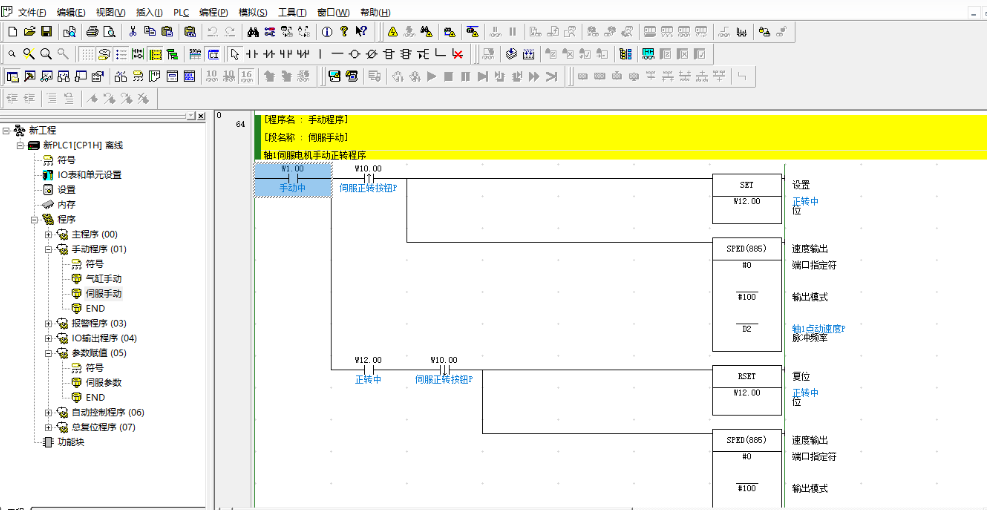
伺服驅動器和伺服電機的接線方法是什么?伺服驅動器如何進行參數配置?如何通過PLC控制伺服電機的正反轉及定長控制?
2021-09-29 08:38:16
電腦2路電源控制,再增加2路控制是不是在原來板上再加2個繼電器和2個電容就可以了?電腳控制模塊用換嗎?
2017-12-25 08:26:49
該FB塊一個塊就可以實現伺服的上電,使能,相對定位,絕對定位,JOG運行,回原控制(包括碰到極限反找原位功能),以及故障清除和伺服狀態顯示等功能。該塊核心是將西門子庫motion Control中
2021-06-28 06:21:17
請問PLC是怎么控制伺服電機的?
2021-09-26 06:04:03
請教一個問題,近段時間在網上看到了有賣無線WiFi智能插座的,WiFi智能插座可以連接家里的無線路由器,然后給手機安裝APP,只要在有網絡的地方就可以實現遠程控制WiFi插座。現在想咨詢貴公司的串口WiFi模塊能否實現同樣的功能,如何實現?
2019-01-15 06:35:45
詳述了用PLC的高速計數和高速脈沖輸出指令PTO/PWM基本指令實現自動運動定位的控制。系統采用PLC的PTO輸出直接驅動步進電機驅動器、增量型旋轉編碼器和導螺桿機構形成閉環控制系
2010-02-11 14:37:20 104
104 詳述了用PLC的高速計數和高速脈沖輸出指令PTO/PWM基本指令實現自動運動定位的控制。系統采用PLC的PTO輸出直接驅動步進電機驅動器、增量型旋轉編碼器和導螺桿機構形成閉環控制系
2010-07-13 16:10:3738 本文旨在闡述利用PLC控制伺服電機實現準確定位的方法,介紹控制系統在設計與實施中需要認識與解決的若干問題,給出了控制系統參考方案及軟硬件結構的設計思路,對于工業生產中
2011-07-12 11:05:3695782 
為了在一定場合取代高成本的定位控制,實現準確定位控制系統最優的性價比,采用SIEMENS公司S7-200系列PLC作為控制器,控制三相交流異步電動機和步進電機運行以實現準確定位。
2011-07-13 09:44:199642 
PLC控制伺服電機應用實例。
介紹PLC如何控制伺服電機應用的實例。
2016-05-05 11:37:3968 伺服電機控制PLC程序
2016-12-17 16:18:3710 本文介紹了利用A9系列伺服中伺服PLC引擎實現多達32段位置定位功能,對伺服控制具有一定的參考價值。
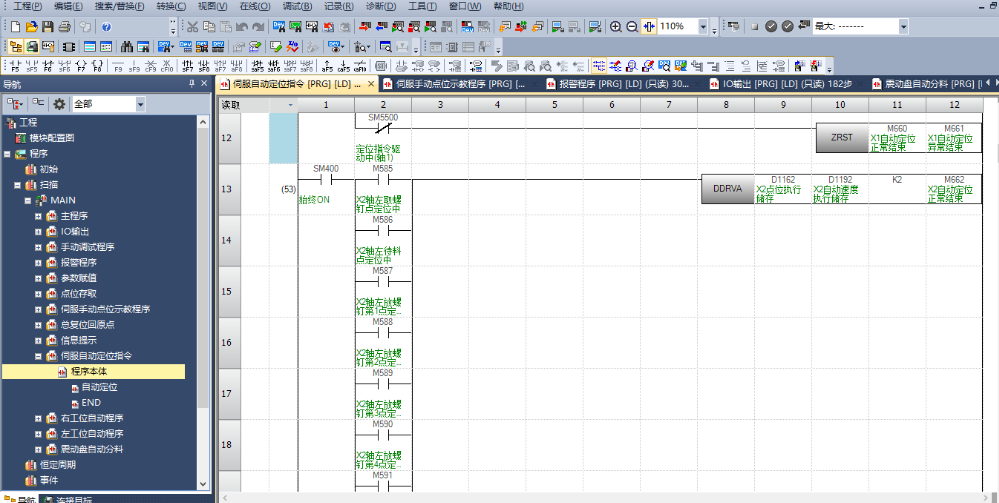
2017-09-25 15:05:4910 由PLC與伺服電機組成一個系統,通過PLC控制伺服電機,實現機構的原點回歸、相對定位和絕對定位功能
2017-11-13 06:01:0033478 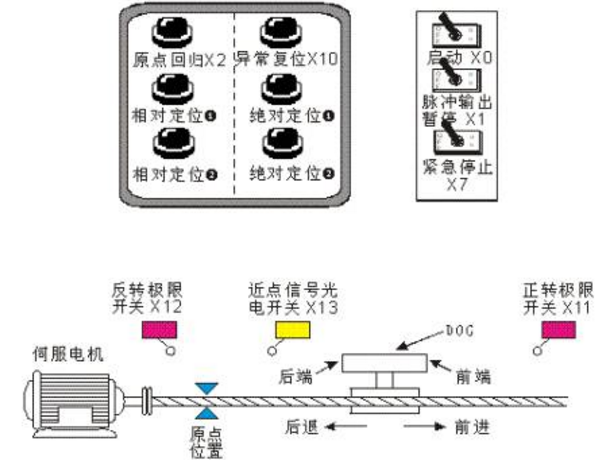
臺達伺服定位控制案例臺達伺服定位控制案例臺達伺服定位控制案例
2018-01-03 15:46:4129 伺服定位控制可以在PLC中實現,也可以在伺服控制器中實現。用PLC實現,可選用317-T的工藝型CPU,內置定位控制功能。PLC通過通訊向伺服發送速度指令,并將伺服的反饋取到PLC中,在PLC中實現
2018-02-01 15:17:0411613 本文詳細介紹了實現永宏PLC接伺服控制,希望對機電控制的工程師有所幫助。
2018-02-26 19:39:487737 PLC控制伺服電機學習資料
2018-04-02 16:17:2256 本文主要詳解PLC控制伺服系統步驟,首先介紹了PLC工作原理以及PLC控制伺服電機3種方式,其次闡述了西門子PLC控制的伺服控制系統,具體的跟隨小編一起來了解一下。
2018-06-01 10:46:1255330 速時間,以及需要知道伺服驅動器什么時候定位完成,是否碰到限位等等。無論哪種PLC,無非就是對這幾個物理量的控制和運動參數的讀取,只是不同PLC實現方法不一樣。
2018-06-27 09:36:4922596 伺服電機最主要的應用還是定位控制,位置控制有兩個物理量需要控制,那就是速度和位置,確切的說,就是控制伺服電機以多快的速度到達什么地方,并準確的停下。
2018-07-23 14:55:003277 本系統用工控機通過MODBUS RTU協議分別跟Kinco PLC和臺安變頻器通訊,Kinco PLC則通過CAN總線控制Kinco伺服。該系統利用CAN總線的高通訊速率,從而可以快速地控制多臺伺服的聯動,達到了系統快速性的要求。系統控制方框圖如圖3所示:
2020-04-04 11:04:002650 
就明白了。速度的控制模式主要是通過模擬量的輸入或脈沖的頻率都可以進行轉動速度的控制,在有上位控制裝置的外環PID控制時速度模式也可以進行定位,但必須把電機的位置信號或直接負載的位置信號給上位反饋以做運算用
2018-10-17 11:36:583432 V90伺服可實現內部位置控制,但使用PLC的I/O口控制接線及應用相對比較復雜,V90集成了Modbus和USS通信,可以利用通信控制伺服實現內部位置控制和速度控制,只需要一根通信電纜即可實現控制大為的簡化了接線。
2018-12-17 10:11:3314034 
日本富士伺服電機絕對定位和相對定位 日本富士伺服電機是廣泛應用于自動化生產行業中的一種設備產品,通過深圳日本伺服電機可使控制速度,位置精度非常準確,可以將電壓信號轉化為轉矩和轉速以驅動控制對象。但是
2020-06-12 15:01:573187 速度控制一般都是有變頻器實現,用伺服電機做速度控制,一般是用于快速加減速或是速度精準控制的場合,因為相對于變頻器,伺服電機可以在幾毫米內達到幾千轉,由于伺服都是閉環的,速度非常穩定。
2018-12-26 17:33:359069 通過PLC給伺服驅動器發驅動脈沖,通過改變脈沖頻率來控制移動速度,通過改變脈沖數量來改變移動量,控制步進電機移動方向。
伺服驅動器是執行機構,在接收到PLC發來的信號,控制電機來運動,通過位置編碼器精準定位。
2019-06-30 10:15:3647043 
plc控制伺服,如何實現暫停功能,基本可以從硬件和軟件的方面去實現伺服電機的暫停功能。硬件方面就是斷開伺服驅動器的電源,在這里一般都有一個常閉的信號接到驅動器電源的接觸器上,一旦發生故障則斷開電源
2019-07-02 15:43:1218372 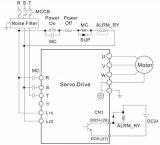
如何用一個PLC控制兩個或多個伺服電機同步運行主電機速度改變時,其它伺服電機也跟著同步運行。用第一個伺服驅動的輸出控制第二個伺服驅動器,就可以實現同步運動了,只要要求不是太高這種方法完全可行。同步分控制精度來確定控制方案的。
2019-07-18 08:00:0021 伺服電機控制器是數控系統及其他相關機械控制領域的關鍵器件,一般是通過位置、速度和力矩三種方式對伺服馬達進行控制,實現高精度的傳動系統定位。
2019-07-26 14:35:4315806 首先搞清楚這兩個元件的功能,變頻器是變速裝置,編碼器是計數裝置,如何實現定位控制,原理很簡單:編碼器的作用很重要把脈沖數轉換為位置信號反饋到控制器如PLC,然后PLC根據位置信號改變速度以及控制變頻器停止。與伺服系統控制的伺服電機類似。
2019-10-13 14:46:0033373 位置模式:通過上位機發送一定頻率的高速脈沖,配合方向信號,實現電機的正反轉,是伺服電機最常用的控制模式,上位機我們可以選擇plc、單片機、手動脈沖發生器等,調整脈沖的頻率,就可以改變伺服電機的速度。
2020-03-10 09:36:4849208 經常聽到眾多人說plc控制伺服電機運行,那么也有人疑惑可以不可以控制步進呢?答案是可以的,也需要配步進電機驅動器。plc控制步進電機其實在使用中有一個很大的特點,就是在使用的時候對步進電機的也具有
2021-01-12 16:14:284804 不管是伺服電機還是其他的什么變頻電機、步進電機,它們都能通過總線被PLC控制,畢竟人家PLC就叫可編程邏輯控制器,它是控制器。
2022-09-30 10:22:514031 還有部分伺服驅動器內置控制器功能,可以在驅動器內部進行編程,實現運動控制,能實現電子凸輪,相位同步等等高級運動控制功能。主要以Copley伺服為代表,另外 施耐德等變頻器安裝運動控制卡件,也能實現此功能。
2022-11-06 17:44:262755 一般我們控制伺服電機正反轉,位置控制,或者是位置+速度控制,都是采用控制器發脈沖的控制方式,比如三菱PLC的FX2N和三菱的伺服驅動器,就可以利用PLC編輯程序,根據您所要的當量換算,計算出要發出的脈沖數,發送速度等參數,然后驅動設備運行相應的距離。
2022-12-07 21:38:224173 伺服電機最主要的應用還是定位控制,位置控制有兩個物理量需要控制,那就是速度和位置,確切的說,就是控制伺服電機以多快的速度到達什么地方,并準確的停下。
2022-12-12 14:06:176574 速度控制一般都是用變頻器實現,用伺服電機做速度控制,一般是用于快速加減速或是速度精準控制的場合,因為相對于變頻器,伺服電機可以在幾毫米內達到幾千轉,由于伺服都是閉環的,速度非常穩定。
2023-01-05 10:38:335439 “由PLC+伺服控制器+伺服電機(配套設備)+編碼器(外部設備端)組成的全閉環系統,如何實現??我的方法是由PLC無限脈沖給伺服器,當達到要求工藝位置(外部編碼器連接至PLC)時PLC停止脈沖輸出,但實際停連位置不夠準確,大概是由于,達到位置再停止信號會因為伺服器的減速停車而誤差!!”
2023-02-06 17:33:195778 系統中。
伺服控制器通過接收控制信號(通常是脈沖信號或模擬信號),對伺服電機進行精準的控制,以實現所需的運動和位置控制。伺服控制器通常包括微處理器、電源、信號接收電路、驅動電路等組成部分。
2023-03-12 11:12:197266 交流伺服電機控制系統是什么?一般都是PLC,無論你想通過總線控制交流伺服電機還是通過脈沖控制交流伺服電機,PLC都可以搞定。 PLC也叫可編程邏輯控制器,是通過數字量信號或模擬量信號實現自動化
2023-03-16 12:10:021584 PLC控制器不能直接使用,需要進行編程才能實現所需的控制功能。編程過程中需要根據控制要求和實際情況,設計程序邏輯和相應的控制指令,然后將程序下載到PLC控制器中,從而實現控制功能。因此,PLC控制器需要經過編程才能發揮作用。
2023-03-16 16:50:045501 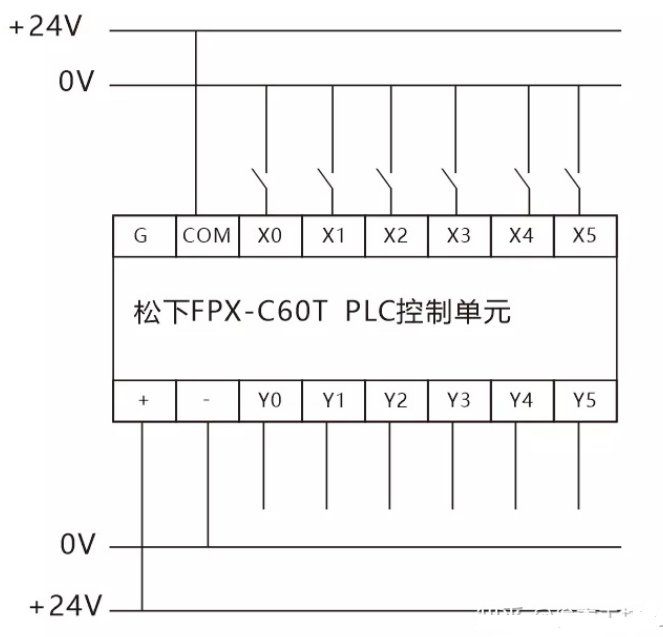
總之,PLC控制伺服電機正反轉的工作原理是通過編寫程序、檢測輸入信號、信號處理、控制輸出、反饋監測等步驟來實現。
2023-03-22 17:40:0913176 嚴格來講,編碼器只會告訴你改如何定位,要如何執行,是需要靠數控系統(或者PLC之類控制器)控制伺服或者步進電機來實現定位的,編碼器好比人的眼睛,知道電機軸或者負載處于當前某個位置,工業上用的一般是光電類型編碼器,下邊簡單說明一下。
2023-04-07 10:16:393142 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的伺服控制,其實就是對伺服電機的位置控制。 其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-04-27 17:34:352497 
在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-08-09 09:25:281596 PLC控制伺服到底需要哪些信號就可以實現定位控制了?下面給大家分享兩種控制。
2023-08-11 10:20:53939 
在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-09-08 11:22:482266 PLC的運動控制是指PLC系統通過控制運動設備的運動軸,實現精確、穩定和可編程的運動控制功能。它可以控制運動設備(如電機、伺服驅動器等)的位置、速度和加速度等參數,以實現所需的運動軌跡和運動邏輯。
2023-10-20 10:20:132806 PLC的運動控制是指PLC系統通過控制運動設備的運動軸,實現精確、穩定和可編程的運動控制功能。它可以控制運動設備(如電機、伺服驅動器等)的位置、速度和加速度等參數,以實現所需的運動軌跡和運動邏輯
2023-10-23 08:08:083586 
通過一個FX3U的CPU就可以帶三個軸的伺服驅動器。PLC的脈沖輸出端是固定的,Y0、Y1、Y2。具體是否具備脈沖輸出可看模塊的手冊。其余的Y可以作為方向的輸出端。輸出的最大脈沖頻率為100KHz。
2023-10-26 10:08:215882 
伺服電機重要的應用是定位控制。位置控制有兩個需要控制的物理量,即速度和位置。準確地說,是控制伺服電機到達位置的速度和停止的速度。
2023-11-06 10:29:182085 了解這些就可以搞懂 IGBT
2023-11-24 15:47:294176 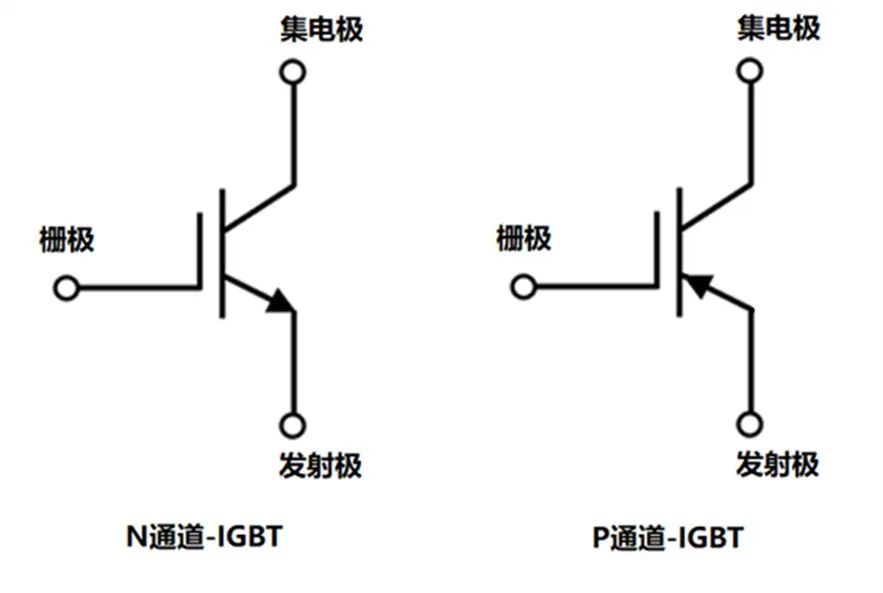
PLC(可編程邏輯控制器)是一種常用于工業自動化系統的控制器。伺服電機是一種具有高精度、高速度和高可靠性的電動機,可以用于實現精確控制和準確位置的要求。在PLC中,我們可以使用不同的方法來控制伺服
2023-12-25 11:16:307110 傳送帶控制:PLC可以控制傳送帶的啟停、速度和方向,實現物料的輸送和分揀。通過讀取傳感器信號,PLC可以實現自動化的物料運輸和處理過程。
2024-01-12 09:44:281166 伺服脈沖控制方式通過高速脈沖信號對伺服電機進行精確控制,能夠實現高精度的定位和速度調節,提高生產效率和產品質量。
2024-01-18 14:36:062692 伺服脈沖控制方式通過高速脈沖信號對伺服電機進行精確控制,能夠實現高精度的定位和速度調節,提高生產效率和產品質量。
2024-01-22 09:34:532682 伺服電機是一種通過反饋機制實現精確位置和速度控制的電機。伺服電機通常由電機、控制器和編碼器等組成。控制器接收來自編碼器的反饋信號,并根據指令信號調節電機的速度和位置。伺服電機廣泛應用于需要高精度定位
2024-02-04 10:10:452811 請教伺服電機絕對定位和相對定位問題? 伺服電機是一種能夠根據輸入信號精確控制位置、速度和扭矩的電機。它在自動化的工業領域得到廣泛應用,數據中心、機器人、醫療設備等都離不開伺服電機的運動控制。而伺服
2024-02-05 17:39:502520 ? ? ? 伺服電機是一種能夠根據輸入信號精確控制位置、速度和扭矩的電機。它在自動化的工業領域得到廣泛應用,數據中心、機器人、醫療設備等都離不開伺服電機的運動控制。而伺服電機的定位方式有兩種,一種
2024-03-18 08:39:446018 
了廣泛應用。本文將詳細闡述PLC如何控制伺服驅動器,包括控制原理、控制方式、實現步驟以及注意事項等方面,以期為讀者提供全面的技術參考。
2024-06-03 15:36:032645 可以,PLC(Programmable Logic Controller,可編程邏輯控制器)是一種廣泛應用于工業自動化領域的控制設備。它不僅可以實現邏輯控制、順序控制等功能,還可以進行運動控制。本文
2024-06-12 10:41:511809 可編程邏輯控制器(PLC)是一種廣泛應用于工業自動化領域的電子設備,它通過接收輸入信號、處理邏輯運算和輸出控制信號來實現對機械設備的控制。本文將詳細介紹PLC的工作原理、組成、編程方法以及實際
2024-06-12 10:43:205324 的基本原理 伺服電機是一種閉環控制系統,其工作原理是通過檢測電機的實際位置、速度等信息,與給定的指令值進行比較,然后根據偏差值來調整電機的運行狀態,以實現精確控制。伺服電機主要由電機、編碼器、驅動器等部分組成。 PLC與伺
2024-06-12 10:46:094565 驅動器,實現伺服電機的精確控制,是工業自動化技術發展的重要方向之一。本文將從PLC控制伺服驅動器的基本原理、主要方式、實現步驟以及應用實例等方面進行詳細解析。
2024-06-12 11:25:524559 PLC(可編程邏輯控制器)是一種廣泛應用于工業自動化領域的控制設備。伺服電機作為執行元件,可以通過PLC進行精確控制。以下是關于PLC控制伺服電機的指令的詳細介紹。 概述 PLC控制伺服電機
2024-06-12 11:39:264675 在現代工業自動化領域,可編程邏輯控制器(PLC)和伺服驅動器的組合應用非常廣泛。PLC 控制伺服驅動器可以實現精確的速度、位置和力矩控制,廣泛應用于機械手、輸送帶、數控機床等多種自動化設備。本文將
2024-06-12 14:07:493942 在工業自動化領域中,西門子PLC(Programmable Logic Controller,可編程邏輯控制器)與伺服控制器之間的通訊是實現高效、精確控制的關鍵環節。本文旨在詳細闡述西門子PLC與伺服控制器之間的通訊方式、原理、配置步驟以及實際應用案例,以期為工程師和技術人員提供有益的參考。
2024-06-14 15:49:435903 PLC的伺服定位控制進行詳細的介紹,包括其基本原理、實現方法、參數設置以及應用案例等方面,旨在為相關技術人員提供參考和借鑒。
2024-06-18 09:26:454914 在工業自動化領域中,伺服電機因其高精度、高速度和高可靠性的特性而得到廣泛應用。為了實現對伺服電機的精確控制,通常需要讀取其當前位置信息。可編程邏輯控制器(PLC)作為工業自動化系統的核心控制設備
2024-06-18 10:07:315072 在現代工業自動化系統中,伺服電機與PLC(可編程邏輯控制器)的協同控制是實現高精度、高效率運動控制的關鍵技術。伺服電機以其高精度、高響應速度的特點,在定位、速度控制等方面表現出色;而PLC則以其強大
2024-06-24 14:30:453171 控制系統的主要作用是實現對電機的精確控制,包括位置、速度和加速度的控制。具體來說,它可以實現以下幾個方面的作用: 1.1 精確控制位置 步進電機伺服控制系統可以實現對電機軸的精確定位,精度可以達到微米甚至納米級別。
2024-09-04 09:46:121709 補助馬達間接變速裝置。伺服電機能夠將電壓信號轉化為轉矩和轉速,用以驅動控制對象,從而實現對機械運動的精確控制。伺服電機的工作原理可以簡單概括為:輸入控制信號→伺服控制器→伺服電機→輸出運動。 伺服電機系統主要由電機本體、驅
2024-10-22 16:58:204136 在現代工業自動化領域,三菱電機以其高質量和可靠性而聞名。三菱PLC伺服控制系統是實現精確運動控制和高效生產的關鍵技術之一。 一、三菱PLC伺服控制系統概述 三菱PLC伺服控制系統是一種集成了可編程
2024-12-26 17:32:412641 控制,例如在制造業中控制生產流程的各個環節,通過讀取輸入信號、邏輯運算和控制以及輸出信號控制來實現對工業制造或自動化系統的控制。 伺服控制:通常用于控制動作參數,如位置、速度、加速度、力或扭矩等,主要針對電機的運動進
2025-06-25 17:54:091126
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論