") PLC控制步進(jìn)電機(jī)實(shí)例,實(shí)現(xiàn)機(jī)構(gòu)原點(diǎn)回歸、相對(duì)定位和絕對(duì)定位
PLC控制步進(jìn)電機(jī)實(shí)例,實(shí)現(xiàn)機(jī)構(gòu)原點(diǎn)回歸、相對(duì)定位和絕對(duì)定位









本文轉(zhuǎn)自網(wǎng)絡(luò),版權(quán)歸原作者,如果您覺得不好,請(qǐng)留言聯(lián)系我們刪除!
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
plc
+關(guān)注
關(guān)注
5052文章
14695瀏覽量
487969 -
伺服電機(jī)
+關(guān)注
關(guān)注
88文章
2196瀏覽量
61448
原文標(biāo)題:PLC控制步進(jìn)電機(jī)實(shí)例,一分鐘搞定!
文章出處:【微信號(hào):mcu168,微信公眾號(hào):硬件攻城獅】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
步進(jìn)電機(jī)驅(qū)動(dòng)器的作用介紹
步進(jìn)電機(jī)驅(qū)動(dòng)器是現(xiàn)代工業(yè)自動(dòng)化、精密控制設(shè)備中的核心組件之一,其作用遠(yuǎn)不止簡(jiǎn)單的“驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng)”,而是通過精確控制電流、細(xì)分步距角以及動(dòng)態(tài)響

TMC4361A:實(shí)現(xiàn)步進(jìn)電機(jī)S形曲線高速平穩(wěn)運(yùn)行!
精密運(yùn)動(dòng)控制系統(tǒng)中,電機(jī)的平穩(wěn)啟停、高速運(yùn)行與精準(zhǔn)定位往往是設(shè)計(jì)的核心挑戰(zhàn)。今天,我們來深入了解一款專為步進(jìn)電機(jī)優(yōu)化設(shè)計(jì)的運(yùn)動(dòng)

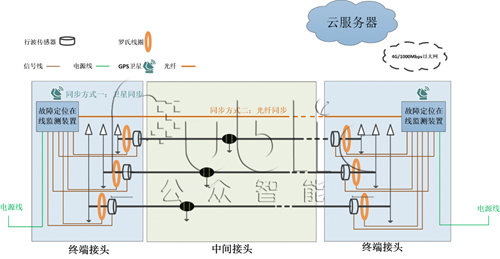
電纜故障定位預(yù)警系統(tǒng)實(shí)現(xiàn)故障定位的核心原理
信號(hào)監(jiān)測(cè)、信號(hào)處理、數(shù)據(jù)分析及物聯(lián)網(wǎng)技術(shù),實(shí)現(xiàn)了從隱患監(jiān)測(cè)到故障定位的閉環(huán)管理。 實(shí)現(xiàn)故障定位的核心原理,是系統(tǒng)基于電纜故障產(chǎn)生的多物理信號(hào)特征(電、熱、聲、光等),結(jié)合行波傳播特性與
泡沫起升儀步進(jìn)/伺服電機(jī)細(xì)分驅(qū)動(dòng)技術(shù):實(shí)現(xiàn)沖程毫米級(jí)定位的電子方案
在泡沫起升儀的沖程控制中,毫米級(jí)定位精度是保障泡沫輸出穩(wěn)定性、作業(yè)位置準(zhǔn)確性的關(guān)鍵。步進(jìn)伺服電機(jī)細(xì)分驅(qū)動(dòng)技術(shù)作為核心電子方案,通過優(yōu)化電機(jī)運(yùn)

變頻器+異步電機(jī)的組合,外接編碼器如何實(shí)現(xiàn)高精度定位運(yùn)動(dòng)
在工業(yè)自動(dòng)化領(lǐng)域,變頻器與異步電機(jī)的組合因其經(jīng)濟(jì)性和可靠性被廣泛應(yīng)用,但傳統(tǒng)開環(huán)控制難以滿足高精度定位需求。通過外接編碼器實(shí)現(xiàn)閉環(huán)控制,可顯

GPS定位和地磁定位有什么區(qū)別?
GPS定位和地磁定位是兩種原理完全不同、應(yīng)用場(chǎng)景也差異巨大的技術(shù)。簡(jiǎn)單來說:GPS定位是絕對(duì)定位,告訴你“你在世界的哪個(gè)經(jīng)緯度”。地磁

伺服電機(jī)和步進(jìn)電機(jī)的核心區(qū)別
大家在運(yùn)動(dòng)控制的時(shí)候是用伺服電機(jī)的還是用步進(jìn)電機(jī)做定位控制了?為什么有時(shí)候用伺服

采用MT6835絕對(duì)式磁編碼器實(shí)現(xiàn)高精度閉環(huán)步進(jìn)電機(jī)控制
"MT6835絕對(duì)式磁編碼器賦能閉環(huán)步進(jìn)電機(jī),實(shí)現(xiàn)±0.05°高精度控制,解決傳統(tǒng)開環(huán)系統(tǒng)的失步與振動(dòng)問題,工業(yè)應(yīng)用合格率提升至99.5%。
伺服電機(jī)中的回原點(diǎn)方式
伺服電機(jī)的運(yùn)行需要一個(gè)參考點(diǎn),這個(gè)參考點(diǎn)就是原點(diǎn)。原點(diǎn)通常是由光電開關(guān)或機(jī)械開關(guān)來確定的,其位置是固定的。當(dāng)伺服電機(jī)運(yùn)行時(shí),控制器會(huì)根據(jù)

單片機(jī)怎么控制步進(jìn)電機(jī)的
步進(jìn)電機(jī)作為一種將電脈沖信號(hào)轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu),其運(yùn)轉(zhuǎn)依賴于脈沖信號(hào)的控制,而單片機(jī)作為控制核心,通過輸出特定的脈沖信號(hào)和方向信號(hào),
多摩川17位絕對(duì)式編碼器實(shí)現(xiàn)伺服系統(tǒng)納米級(jí)定位精度
在工業(yè)自動(dòng)化的浪潮中,伺服系統(tǒng)的定位精度就像是一把精準(zhǔn)的手術(shù)刀,決定著生產(chǎn)的質(zhì)量和效率。而多摩川 17 位絕對(duì)式編碼器,無疑是這把手術(shù)刀上最為鋒利的刃口,它實(shí)現(xiàn)了伺服系統(tǒng)納米級(jí)的定位精

輪轂電機(jī)不平衡電磁力對(duì)車輪定位參數(shù)的影響
給車輪,對(duì)車輪定位參數(shù)產(chǎn)生一定的影響。針對(duì)上述問題,本文中以一款無減速機(jī)構(gòu)輪轂電機(jī)驅(qū)動(dòng)電動(dòng)汽車為對(duì)象,在建立其傳動(dòng)系動(dòng)力學(xué)模型,、雙橫臂懸架動(dòng)力學(xué)模型和輪轂電機(jī)不平衡電磁力數(shù)學(xué)模型的基
發(fā)表于 06-10 13:17
單圈精微·多圈無界:絕對(duì)值編碼器如何重塑工業(yè)定位新范式
效率與安全底線。而在這場(chǎng)定位技術(shù)的革新中, 絕對(duì)值編碼器 正以“單圈精準(zhǔn)錨點(diǎn),多圈無限延伸”的雙重優(yōu)勢(shì),成為打破傳統(tǒng)定位桎梏的核心利器。 單圈精度:毫厘之間的技術(shù)突圍 傳統(tǒng)增量式編碼器依賴“相
基于 DeviceNet 轉(zhuǎn) MODBUS RTU 協(xié)議的施耐德 PLC 與 ABB 電機(jī)驅(qū)動(dòng)器倉儲(chǔ)堆垛機(jī)的定位控制優(yōu)化方案?
基于 DeviceNet 轉(zhuǎn) MODBUS RTU 協(xié)議的施耐德 PLC 與 ABB 電機(jī)驅(qū)動(dòng)器倉儲(chǔ)堆垛機(jī)的定位控制優(yōu)化方案?
案例背景?
物流倉儲(chǔ)中心的自動(dòng)化程度不斷提升,大量設(shè)備協(xié)
發(fā)表于 05-03 10:45
剎車步進(jìn)電機(jī)的特點(diǎn)
剎車步進(jìn)電機(jī)作為一種結(jié)合了步進(jìn)電機(jī)精確控制與制動(dòng)功能的特種電機(jī),其獨(dú)特的設(shè)計(jì)和工作原理使其在需要




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論