") labview如何快速精確控制步進(jìn)電機(jī)實(shí)現(xiàn)定位運(yùn)動(dòng)
labview如何快速精確控制步進(jìn)電機(jī)實(shí)現(xiàn)定位運(yùn)動(dòng)

前一段時(shí)間接到老板的任務(wù),要做一個(gè)labview控制電機(jī)快速移動(dòng)拍照的小項(xiàng)目,雖然是個(gè)小項(xiàng)目,剛開(kāi)始做這個(gè)走了不少?gòu)澛罚@里分享一下經(jīng)驗(yàn):
前期由于做了一些labview通過(guò)相機(jī)拍照的項(xiàng)目,所以是現(xiàn)成的,移植過(guò)來(lái)就可以了,只要添加一個(gè)簡(jiǎn)單的電機(jī)運(yùn)動(dòng)控制就可以實(shí)現(xiàn)了,最初沒(méi)有想太多,直接選擇了使用STM32單片機(jī)來(lái)做電機(jī)控制,labview通過(guò)串口發(fā)送指令給單片機(jī),單片機(jī)發(fā)出脈沖控制電機(jī)移動(dòng),在網(wǎng)上買(mǎi)了一個(gè)現(xiàn)成的stm32的電機(jī)開(kāi)發(fā)板,附帶了運(yùn)動(dòng)控制的C語(yǔ)言源碼,T型S型加減速運(yùn)動(dòng)什么的都有,代碼移植修改一下,很快就實(shí)現(xiàn)了基本功能了,然后就進(jìn)入項(xiàng)目性能測(cè)試階段,由于項(xiàng)目要求在1s內(nèi)快速移動(dòng)幾十個(gè)位置停穩(wěn)并且拍照,而且每一個(gè)位置之間的距離相對(duì)比較長(zhǎng)。
然后一個(gè)大大的坑就出現(xiàn)了,由于相機(jī)比較大,T型加減速運(yùn)動(dòng),啟停瞬間沖擊比較大,相機(jī)振動(dòng)大,需要S加減速,再加上運(yùn)動(dòng)距離長(zhǎng),要求高速運(yùn)動(dòng)速度比較快,單片機(jī)的計(jì)算速度嚴(yán)重不足,最后無(wú)論如何都達(dá)不到項(xiàng)目的技術(shù)指標(biāo),老板催的要死,又費(fèi)了好長(zhǎng)時(shí)間了,不想改方案,不停的優(yōu)化代碼,浪費(fèi)了好幾個(gè)月還是搞不定,被老板罵死了。
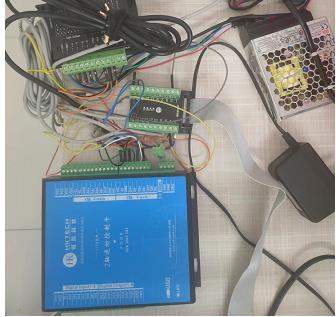
最后每辦法,為了趕緊完成項(xiàng)目,花了幾百塊錢(qián)在網(wǎng)上買(mǎi)了一個(gè)現(xiàn)成的運(yùn)動(dòng)控制卡,如圖:
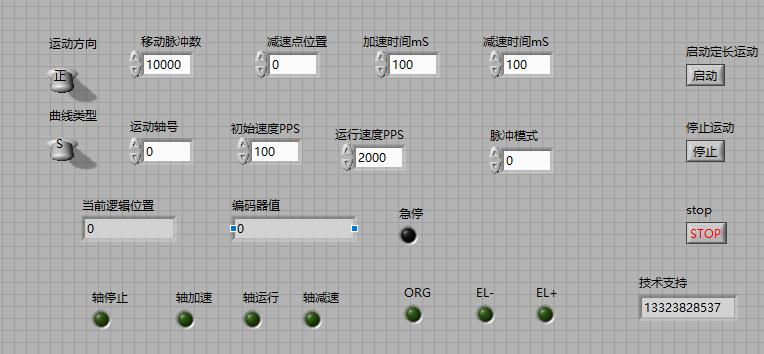
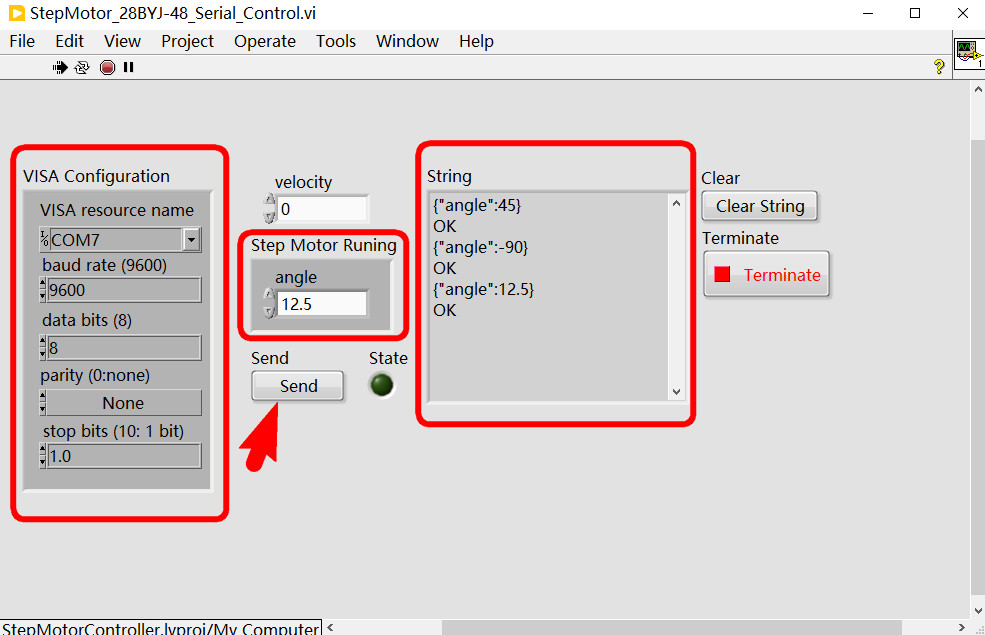
研究了一兩天廠(chǎng)家的說(shuō)明書(shū),把線(xiàn)接上,提供的例程運(yùn)行一遍,基本問(wèn)題不大,例程界面如下:
直接把例程稍作修改封裝成一個(gè)子VI,放到我的項(xiàng)目程序里面一調(diào)用,幾天功夫項(xiàng)目交接。
審核編輯 黃昊宇
-
單片機(jī)
+關(guān)注
關(guān)注
6076文章
45494瀏覽量
670258 -
LabVIEW
+關(guān)注
關(guān)注
2017文章
3688瀏覽量
347060 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
153文章
3248瀏覽量
152345 -
位置控制
+關(guān)注
關(guān)注
0文章
24瀏覽量
9668
發(fā)布評(píng)論請(qǐng)先 登錄
步進(jìn)電機(jī)驅(qū)動(dòng)器的作用介紹

TMC4361A:實(shí)現(xiàn)步進(jìn)電機(jī)S形曲線(xiàn)高速平穩(wěn)運(yùn)行!

如何在LabVIEW環(huán)境中通過(guò)NISoftMotion驅(qū)動(dòng)配置與運(yùn)用NI9512
泡沫起升儀步進(jìn)/伺服電機(jī)細(xì)分驅(qū)動(dòng)技術(shù):實(shí)現(xiàn)沖程毫米級(jí)定位的電子方案

?DRV8711 步進(jìn)電機(jī)控制器技術(shù)文檔總結(jié)

伺服電機(jī)和步進(jìn)電機(jī)的核心區(qū)別

TMC5041:?jiǎn)涡酒p軸步進(jìn)電機(jī)驅(qū)控方案,賦能精密靜音運(yùn)動(dòng)控制

步進(jìn)電機(jī)運(yùn)動(dòng)電流與保持電流的意義與用法

單片機(jī)怎么控制步進(jìn)電機(jī)的
同步電機(jī)步進(jìn)運(yùn)動(dòng)性能分析
HJ4205步進(jìn)電機(jī)驅(qū)動(dòng)電路詳解
步進(jìn)電機(jī)的 LabVIEW 控制與應(yīng)用
樹(shù)莓派 RP2350 實(shí)現(xiàn)步進(jìn)電機(jī)精確控制
剎車(chē)步進(jìn)電機(jī)的特點(diǎn)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論