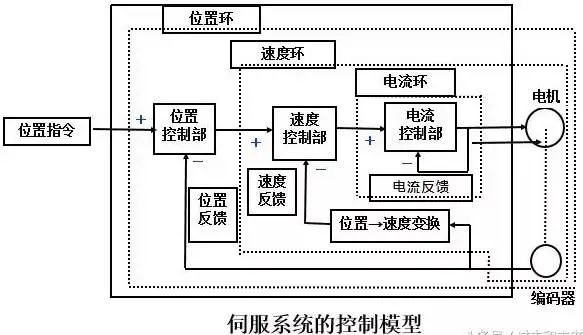
【不懂就問】伺服電機(jī)的控制,典型分為三個環(huán),位置環(huán)、速度環(huán)、電流環(huán)其中涉及的一個控制參數(shù)“位置前饋增益”怎么理解
2018-07-24 08:41:25
伺服電機(jī)控制器與步進(jìn)電機(jī)控制器有啥不一樣?
2021-02-25 07:42:10
伺服電機(jī)是否必須有對應(yīng)的伺服驅(qū)動器來控制?沒有伺服驅(qū)動器能使用伺服電機(jī)嗎?怎么控制?首次接觸,不懂
2023-12-15 07:49:19
伺服電機(jī)的應(yīng)用領(lǐng)域有哪些?伺服電機(jī)有哪些控制模式?
2021-09-27 06:21:31
伺服驅(qū)動器與伺服電機(jī)怎么連接?如何實(shí)現(xiàn)伺服驅(qū)動器的基本控制?
2021-09-28 08:29:01
伺服驅(qū)動器的工作原理是什么?伺服驅(qū)動器的內(nèi)部結(jié)構(gòu)由哪些電路組成?伺服驅(qū)動器是怎樣進(jìn)行接線的?
2021-10-08 06:24:46
怎樣去設(shè)計三軸伺服控制器?如何對三軸伺服控制器的性能進(jìn)行測試?
2021-04-28 06:04:11
控制伺服電機(jī)的FB塊怎么實(shí)現(xiàn)伺服的上電?
2021-09-28 06:08:52
TMCM1636伺服驅(qū)動控制器有何功能?TMCM1636伺服驅(qū)動控制器有哪些應(yīng)用?
2021-10-08 08:32:46
通過labview控制伺服電機(jī),我現(xiàn)在有伺服電機(jī)和驅(qū)動器,NI的采集卡,電腦,他們是如何連接的?還需要什么東西嗎
2016-09-22 20:34:31
USS是什么意思?USS通信與串口通信區(qū)別在什么地方?運(yùn)動控制器PLC的結(jié)構(gòu)是如何構(gòu)成的?什么是伺服驅(qū)動器 ?
2021-06-28 08:03:17
目前伺服控制器的設(shè)計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會大打折扣,因此以FPGA為控制核心,對應(yīng)用于機(jī)載三軸伺服控制平臺的控制器進(jìn)行了設(shè)計與優(yōu)化。
2019-07-16 07:41:04
這里有一個dayond伺服電機(jī)+驅(qū)動器,還有ni的控制卡,如何控制伺服電機(jī)呢?程序大概是怎樣的,求助qq84258478
2024-05-11 19:28:45
此狀態(tài)。在伺服電機(jī)上:設(shè)置控制方式;設(shè)置使能由外部控制;編碼器信號輸出的齒輪比;設(shè)置控制信號與電機(jī)轉(zhuǎn)速的比例關(guān)系。一般來說,建議使伺服工作中的最大設(shè)計轉(zhuǎn)速對應(yīng)9V的控制電壓。比如,山洋是設(shè)置1V電壓對應(yīng)
2015-12-29 11:12:23
伺服電機(jī)控制方式有脈沖、模擬量和通訊這三種,在不同的應(yīng)用場景下,我們該如何選擇伺服電機(jī)的控制方式呢?
2021-01-22 07:46:05
伺服驅(qū)動器和伺服電機(jī)的接線方法是什么?伺服驅(qū)動器如何進(jìn)行參數(shù)配置?如何通過PLC控制伺服電機(jī)的正反轉(zhuǎn)及定長控制?
2021-09-29 08:38:16
怎樣判斷伺服電機(jī)與伺服驅(qū)動器的故障區(qū)別?交流伺服是否是以直流無刷伺服的原理為基礎(chǔ)演變的?交、直流伺服的區(qū)分是否取決于驅(qū)動器與電機(jī)間的電流或電壓的形式?
2021-08-05 06:57:50
:1. 用什么樣的電機(jī)控制卡支持labview。2. 是不是還得用什么采集卡采集編碼器的信號?3. 怎樣繞開伺服電機(jī)驅(qū)動器的速度環(huán),用上位機(jī)實(shí)現(xiàn)速度環(huán)的PID,這樣是不是有延遲?4. 具體應(yīng)該怎樣做呢。謝謝!
2015-11-12 19:02:47
用單片機(jī)控制伺服驅(qū)動器控制交流伺服電機(jī)。用什么單片機(jī)呢?跪求大神。求例程,求助~~~~~~~~~~
2014-04-21 21:02:51
伺服電機(jī)的特點(diǎn)有哪些?伺服電機(jī)有哪幾種類型?不同類型伺服電機(jī)相應(yīng)的控制原理是什么?
2021-06-17 10:50:13
請問伺服驅(qū)動器是怎樣來驅(qū)動伺服電機(jī)的?
2021-09-26 06:40:10
伺服電機(jī)的主要應(yīng)用領(lǐng)域是什么?什么是伺服電機(jī)的速度控制模式?什么是伺服電機(jī)的位置控制模式?
2021-06-28 09:06:45
運(yùn)動控制器控制伺服電機(jī)的指令方式運(yùn)動控制器以模擬量信號控制伺服電機(jī)的調(diào)試步驟
2021-01-21 07:15:51
一、產(chǎn)品概述TMC4671 是一款完全集成的伺服控制器,為 BLDC/PMSM 和 2 相步進(jìn)電機(jī)以及直流電機(jī)和音圈提供磁場定向控制 (FOC)。所有控制功能都在硬件中實(shí)現(xiàn)。集成ADC、位置傳感器
2022-10-31 17:40:37
【簡介】 APX系列可編程精密伺服驅(qū)動器是一款通用、高性能、交/直流供電、結(jié)構(gòu)緊湊的全數(shù)字伺服驅(qū)動器
2023-04-20 10:21:24
什么是伺服電機(jī)
伺服電機(jī):是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)是可以連續(xù)旋轉(zhuǎn)的電-機(jī)械轉(zhuǎn)換器。作為液壓閥控制器的
2009-04-10 12:53:51 5064
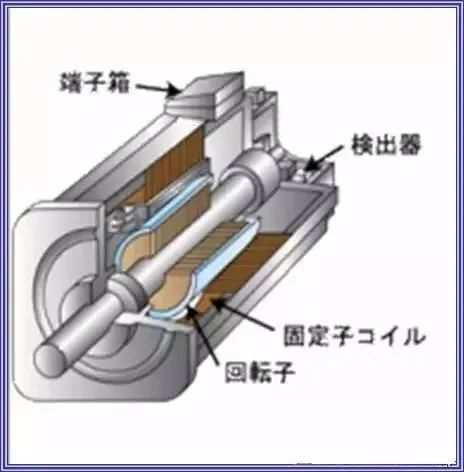
5064 伺服電機(jī)的結(jié)構(gòu)
伺服電機(jī)雙稱為執(zhí)行電機(jī)或控制電機(jī),在自動控制裝置中作執(zhí)行元件。其功能是將電信號轉(zhuǎn)換成轉(zhuǎn)軸的角位移或
2010-02-25 17:35:064098 伺服電機(jī)結(jié)構(gòu)圖
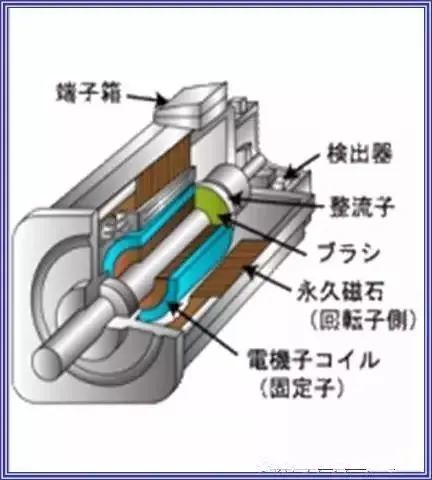
直流伺服電機(jī)結(jié)構(gòu)示意圖
2010-02-25 17:36:2610255 
直流伺服電機(jī)速度控制原理
直流伺服電機(jī)結(jié)構(gòu)示意圖
2010-02-25 17:36:554100 
PLC控制伺服電機(jī)應(yīng)用實(shí)例。
介紹PLC如何控制伺服電機(jī)應(yīng)用的實(shí)例。
2016-05-05 11:37:39 68
68 對伺服電機(jī)及其伺服控制器的簡單介紹及原理。
2016-06-21 16:27:3437 伺服電機(jī)(servo motor )是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)可使控制速度,位置精度非常準(zhǔn)確,可以將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。
2017-05-25 09:08:4330812 伺服定位控制可以在PLC中實(shí)現(xiàn),也可以在伺服控制器中實(shí)現(xiàn)。用PLC實(shí)現(xiàn),可選用317-T的工藝型CPU,內(nèi)置定位控制功能。PLC通過通訊向伺服發(fā)送速度指令,并將伺服的反饋取到PLC中,在PLC中實(shí)現(xiàn)
2018-02-01 15:17:0411613 本文檔內(nèi)容介紹了基于STM32簡易電機(jī)伺服控制器,供參考
2018-03-05 11:29:04111 伺服電機(jī)是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)是可以連續(xù)旋轉(zhuǎn)的電-機(jī)械轉(zhuǎn)換器。作為液壓閥控制器的伺服電機(jī),屬于功率很小的微特電機(jī)。伺服電機(jī)分為直流伺服電機(jī)和交流伺服電機(jī),以永磁式直流伺服電機(jī)和并激式直流伺服電機(jī)最為常用。
2018-04-02 15:47:2357142 伺服的結(jié)構(gòu)是怎樣的?一個最簡易的伺服控制單元,就是一個伺服電機(jī)加伺服控制器,今天就來解析下伺服電機(jī)與伺服控制器。
2018-07-04 10:52:4244570 步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2018-09-16 09:48:193411 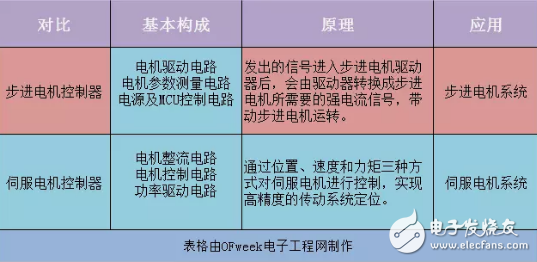
速度控制一般都是有變頻器實(shí)現(xiàn),用伺服電機(jī)做速度控制,一般是用于快速加減速或是速度精準(zhǔn)控制的場合,因?yàn)橄鄬τ谧冾l器,伺服電機(jī)可以在幾毫米內(nèi)達(dá)到幾千轉(zhuǎn),由于伺服都是閉環(huán)的,速度非常穩(wěn)定。
2018-12-26 17:33:359069 這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動控制器給伺服驅(qū)動器發(fā)送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號;伺服驅(qū)動器工作在位置控制模式,位置閉環(huán)由伺服驅(qū)動器完成。日系伺服和國產(chǎn)伺服產(chǎn)品大都采用這種模式。其優(yōu)點(diǎn)是系統(tǒng)調(diào)試簡單,不易產(chǎn)生干擾,但缺點(diǎn)是伺服系統(tǒng)響應(yīng)稍慢。
2019-02-17 11:16:2712493 技術(shù)需知伺服電機(jī)調(diào)試的基本步驟, 運(yùn)動控制器控制伺服電機(jī)通常采用兩種指令方式: 1、數(shù)字脈沖 這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動控制器給伺服驅(qū)動器發(fā)送脈沖/方向或CW/CCW類型的脈沖指令信號
2020-06-12 14:45:486476 伺服電機(jī)控制器是數(shù)控系統(tǒng)及其他相關(guān)機(jī)械控制領(lǐng)域的關(guān)鍵器件,一般是通過位置、速度和力矩三種方式對伺服馬達(dá)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動系統(tǒng)定位。
2019-07-26 14:35:4315806 伺服電機(jī)控制器是數(shù)控系統(tǒng)及其他相關(guān)機(jī)械控制領(lǐng)域的關(guān)鍵器件,一般是通過位置、速度和力矩三種方式對伺服馬達(dá)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動系統(tǒng)定位。 伺服控制相關(guān)技術(shù)已經(jīng)成為關(guān)系國家裝備技術(shù)水平的重要參考。
2019-10-01 09:28:005459 本文主要闡述了直流伺服電機(jī)分類及結(jié)構(gòu)。
2020-01-09 14:18:1314114 本文來分析一下伺服電機(jī)接線圖,伺服電機(jī)怎么接線。
2020-07-29 11:06:35138083 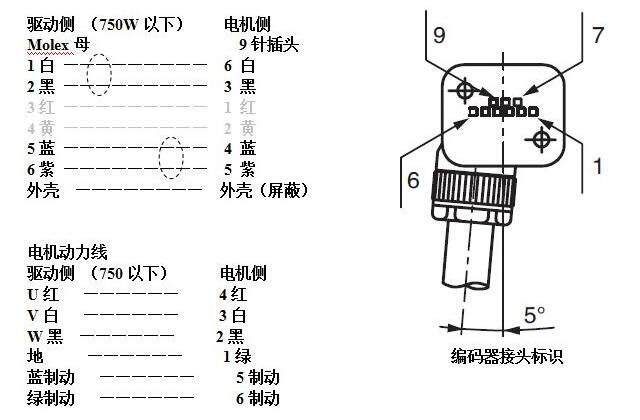
伺服的結(jié)構(gòu)是怎樣的?一個最簡易的伺服控制單元,就是一個伺服電機(jī)加伺服控制器,今天就來解析下伺服電機(jī)與伺服控制器。
2020-09-24 10:54:3415281 
伺服電機(jī)控制器做為伺服電機(jī)的機(jī)械設(shè)備控制器是十分重要的,主要是根據(jù)伺服電機(jī)控制器的實(shí)際操作對伺服電機(jī)開展操縱期限精密度極高的傳動裝置。那麼伺服電機(jī)控制器在安裝流程及其常見問題有什么呢? 1.安裝方向
2021-01-12 16:17:191346 許多人對伺服電機(jī)控制器的原理一直不理解,不知道它是如何控制的。事實(shí)上看相關(guān)介紹也可以知道看起來特別簡單,真正了解就知道不是這么回事。以下小編介紹其中的原理。 常用的伺服控制系統(tǒng)軟件是閉環(huán)控制系統(tǒng),給
2021-07-11 15:22:497747 伺服電機(jī)在各種自動化生產(chǎn)項目里比較常見,各種機(jī)械臂、AGV車的活動機(jī)構(gòu),都是伺服電機(jī)在扮演。伺服電機(jī)和以往的其他電機(jī)相比,采用了閉環(huán)控制,即接收到控制器的控制脈沖后,在電機(jī)運(yùn)動的同時,也會生成一個
2022-06-08 10:06:175970 伺服電機(jī)在各種自動化生產(chǎn)項目里比較常見,各種機(jī)械臂、AGV車的活動機(jī)構(gòu),都是伺服電機(jī)在扮演。伺服電機(jī)和以往的其他電機(jī)相比,采用了閉環(huán)控制,即接收到控制器的控制脈沖后,在電機(jī)運(yùn)動的同時,也會生成一個脈沖。
2022-06-08 10:20:372372 伺服驅(qū)動器也叫伺服控制器或者是伺服放大器,它是一種專用于伺服電機(jī)控制的裝置,其地位類似于變頻控制器之于普通電機(jī)。只有通過伺服驅(qū)動器,我們才能夠讓伺服運(yùn)動電機(jī)實(shí)現(xiàn)速度、位置、力矩的變化,從而實(shí)現(xiàn)精準(zhǔn)的控制目的。
2022-09-09 14:11:172173 速度控制一般都是用變頻器實(shí)現(xiàn),用伺服電機(jī)做速度控制,一般是用于快速加減速或是速度精準(zhǔn)控制的場合,因?yàn)橄鄬τ谧冾l器,伺服電機(jī)可以在幾毫米內(nèi)達(dá)到幾千轉(zhuǎn),由于伺服都是閉環(huán)的,速度非常穩(wěn)定。
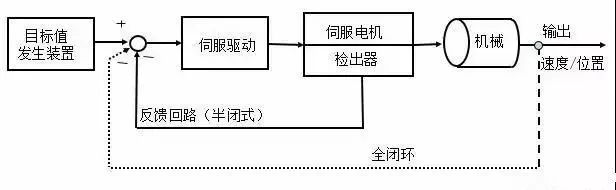
2023-01-05 10:38:335439 “由PLC+伺服控制器+伺服電機(jī)(配套設(shè)備)+編碼器(外部設(shè)備端)組成的全閉環(huán)系統(tǒng),如何實(shí)現(xiàn)??我的方法是由PLC無限脈沖給伺服器,當(dāng)達(dá)到要求工藝位置(外部編碼器連接至PLC)時PLC停止脈沖輸出,但實(shí)際停連位置不夠準(zhǔn)確,大概是由于,達(dá)到位置再停止信號會因?yàn)?b class="flag-6" style="color: red">伺服器的減速停車而誤差!!”
2023-02-06 17:33:195778 伺服電機(jī):是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)是可以連續(xù)旋轉(zhuǎn)的電-機(jī)械轉(zhuǎn)換器。作為液壓閥控制器的伺服電機(jī),屬于功率很小的微特電機(jī),以永磁式直流伺服電機(jī)和并激式直流伺服電機(jī)最為常用。
2023-03-01 15:51:584715 伺服電機(jī)和伺服驅(qū)動器通常作為一個整體出售,也可以根據(jù)用戶的需要進(jìn)行定制組裝。在選擇伺服電機(jī)和伺服驅(qū)動器時,需要考慮電機(jī)的功率、轉(zhuǎn)矩、轉(zhuǎn)速等參數(shù),以及控制系統(tǒng)的響應(yīng)速度、精度、穩(wěn)定性等指標(biāo),以保證系統(tǒng)的性能和穩(wěn)定性。
2023-03-01 15:59:2812451 
伺服電機(jī)是一種可以通過控制器精確地控制位置、速度和加速度的電機(jī)。伺服電機(jī)通常由電機(jī)、編碼器、控制器等部分組成。控制器根據(jù)編碼器反饋的位置信息,調(diào)節(jié)電機(jī)的驅(qū)動電流,從而控制電機(jī)的位置和運(yùn)動。
2023-03-03 11:06:303440 伺服電機(jī)是一種可以通過控制器精確地控制位置、速度和加速度的電機(jī)。伺服電機(jī)通常由電機(jī)、編碼器、控制器等部分組成。控制器根據(jù)編碼器反饋的位置信息,調(diào)節(jié)電機(jī)的驅(qū)動電流,從而控制電機(jī)的位置和運(yùn)動。因此在很多需要高精度運(yùn)動控制的領(lǐng)域得到了廣泛應(yīng)用。
2023-03-03 11:17:2712952 伺服電機(jī)的頻率通常指電機(jī)旋轉(zhuǎn)的頻率,也可以理解為控制器發(fā)送給電機(jī)的脈沖信號頻率。一般來說,伺服電機(jī)的頻率計算涉及到電機(jī)的額定轉(zhuǎn)速、控制器的脈沖輸出方式等因素,具體計算方法如下:
2023-03-07 14:40:3410979 伺服電機(jī)通常是一種帶有反饋控制系統(tǒng)的電機(jī),可以根據(jù)控制器的指令實(shí)現(xiàn)精確位置、速度或扭矩控制。伺服電機(jī)通常適用于需要精密控制的應(yīng)用,如自動化生產(chǎn)線、機(jī)器人等。
直線電機(jī)和伺服電機(jī)都是用于精確控制運(yùn)動的電機(jī),但它們的結(jié)構(gòu)和工作原理有所不同,下面是它們之間的區(qū)別:
2023-03-07 15:01:3511570 伺服電機(jī)的型號通常由一串字母和數(shù)字組成,不同廠家的型號表現(xiàn)形式有所不同。以下是一些常見的伺服電機(jī)型號表示方法:
型號中含有電機(jī)的參數(shù):一些廠家的伺服電機(jī)型號中會包含電機(jī)的參數(shù),如電壓、功率
2023-03-07 15:10:2118873 伺服電機(jī)通常由以下幾個主要部分組成:
電機(jī)部分:伺服電機(jī)的電機(jī)部分一般由轉(zhuǎn)子、定子、繞組、磁極等部件組成。電機(jī)的類型包括直流伺服電機(jī)、交流伺服電機(jī)、步進(jìn)伺服電機(jī)等,每種類型的電機(jī)在結(jié)構(gòu)和控制方式上都有所不同。
2023-03-07 15:14:5811175 伺服控制器是一種用于控制電機(jī)運(yùn)動的高精度電子設(shè)備,主要作用是精確控制電機(jī)的位置、速度和加速度等運(yùn)動參數(shù),從而實(shí)現(xiàn)各種運(yùn)動控制任務(wù)。伺服控制器通常使用閉環(huán)控制方式,即通過電機(jī)編碼器或位置傳感器的反饋信號與期望的控制信號進(jìn)行比較,從而調(diào)整輸出信號以控制電機(jī)。
2023-03-09 09:52:064174 伺服控制器的工作原理是通過反饋控制實(shí)現(xiàn)對電機(jī)運(yùn)動的精確控制。伺服控制器通常使用閉環(huán)控制方式,即將編碼器或位置傳感器的反饋信號與期望的控制信號進(jìn)行比較,從而調(diào)整輸出信號以控制電機(jī)。
2023-03-09 09:54:472487 直流伺服電機(jī)和交流伺服電機(jī)都是常見的精密控制電機(jī),但它們之間有一些區(qū)別,如下所示:
原理不同:直流伺服電機(jī)是基于直流電源供電的,通過改變電極之間的磁場來控制電機(jī)的轉(zhuǎn)速和方向;而交流伺服電機(jī)是基于交流電源供電的,通過改變電樞中電流的方向和大小來控制電機(jī)的轉(zhuǎn)速和方向。
2023-03-10 13:46:259894 伺服電機(jī)是一種能夠精確控制運(yùn)動的電機(jī),通常包括以下幾種類型:
直流伺服電機(jī):直流伺服電機(jī)是利用直流電作為輸入信號,通過控制電流大小和方向來控制電機(jī)轉(zhuǎn)速和轉(zhuǎn)向的一種電機(jī)。直流伺服電機(jī)通常具有高速度和高精度的優(yōu)點(diǎn),廣泛應(yīng)用于工業(yè)自動化領(lǐng)域。
2023-03-12 10:20:324990 伺服控制器(Servo Controller)是一種電子設(shè)備,用于控制伺服電機(jī)的運(yùn)動和位置。伺服電機(jī)是一種精密的電機(jī),具有高精度、高速度和高力矩等特點(diǎn),廣泛應(yīng)用于各種需要精準(zhǔn)控制的自動化設(shè)備和機(jī)器人
2023-03-12 11:12:197266 伺服控制器的調(diào)試需要根據(jù)具體應(yīng)用場景和控制器型號進(jìn)行具體設(shè)置和調(diào)整。一般來說,伺服控制器的調(diào)試包括以下幾個方面:
電氣參數(shù)調(diào)整:包括電機(jī)的參數(shù)設(shè)置和校準(zhǔn)、驅(qū)動器參數(shù)的設(shè)置、電源的輸出調(diào)整等。這些參數(shù)的設(shè)置需要根據(jù)具體控制器的說明書和應(yīng)用場景進(jìn)行調(diào)整。
2023-03-12 11:31:274059 伺服電機(jī)配合伺服控制器精確控制電機(jī)軸的角位置、速度和加速度。這是通過帶有解析器(與控制器的模擬通信)或絕對或增量編碼器(與控制器的數(shù)字通信)的閉環(huán)反饋系統(tǒng)來實(shí)現(xiàn)的,它提供軸的位置信息和速度。
2023-03-25 17:16:442706 伺服電動機(jī)分為直流伺服電機(jī)和交流伺服電機(jī)。直流伺服電機(jī)比較便宜,交流伺服電機(jī)比較常用。
2023-04-04 15:05:452619 在回答這個問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的伺服控制,其實(shí)就是對伺服電機(jī)的位置控制。 其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-04-27 17:34:352497 
伺服電機(jī)中,位置傳感器通常是簡單的電位器。這些設(shè)備捕獲的實(shí)際位置被反饋到誤差檢測器,并與目標(biāo)位置進(jìn)行比 較。然后控制器根據(jù)誤差修正電機(jī)的實(shí)際位置,使其與目標(biāo)位置相匹配。
2023-05-06 10:08:212 的連續(xù)旋轉(zhuǎn)伺服器。使用微控制器控制伺服電機(jī)是一種常見的做法。然而,在這個伺服電機(jī)控制電路中,我們將使用定時器芯片IC555來控制它的方向。
2023-06-18 09:58:211651 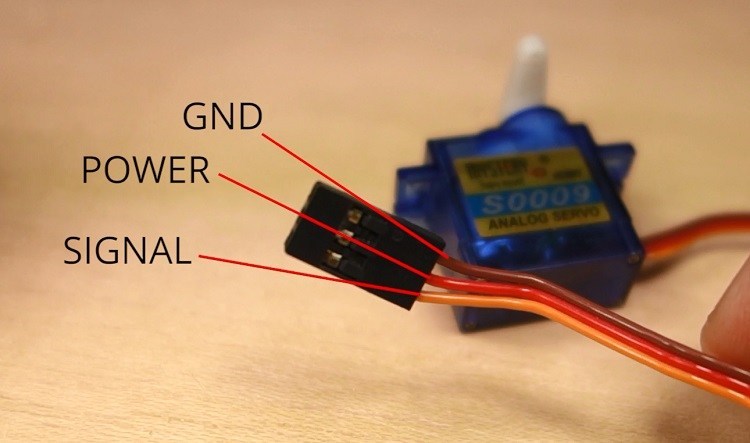
在回答這個問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-08-09 09:25:281596 什么是伺服電機(jī)?伺服是一種電磁裝置,利用負(fù)反饋機(jī)制將電信號轉(zhuǎn)換為受控運(yùn)動。基本上,伺服系統(tǒng)的行為類似于執(zhí)行器,提供對速度、加速度和線性或角度位置的精確控制。它由四件事組成:直流電機(jī)、位置傳感器、齒輪
2023-08-30 08:08:524873 
在回答這個問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-09-08 11:22:482266 電子發(fā)燒友網(wǎng)站提供《基于FPGA的步進(jìn)電機(jī)伺服控制器設(shè)計.pdf》資料免費(fèi)下載
2023-10-25 09:10:401 伺服位置誤差大的原因及解決方法 伺服電機(jī)是一種精密控制裝置,可以實(shí)現(xiàn)高精度、高穩(wěn)定性的位置控制。然而,伺服電機(jī)在使用過程中常常出現(xiàn)定位誤差過大的問題。本文將從機(jī)械結(jié)構(gòu)、控制系統(tǒng)、環(huán)境因素、測量誤差
2023-12-25 13:57:529863 電機(jī)是一種能夠根據(jù)輸入信號控制旋轉(zhuǎn)位置和運(yùn)動速度的電機(jī)。它主要由電機(jī)、編碼器、控制器和電源組成。電機(jī)負(fù)責(zé)產(chǎn)生機(jī)械運(yùn)動,編碼器用來檢測電機(jī)的位置和速度,控制器根據(jù)輸入信號控制電機(jī)的轉(zhuǎn)動。通過不斷的控制和調(diào)整,伺
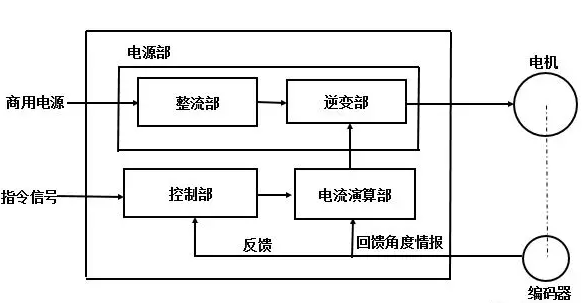
2023-12-25 13:57:552401 伺服驅(qū)動器作為自動化設(shè)備的核心部件之一,其作用和原理對于理解自動化設(shè)備的工作原理具有重要意義。本文將為您詳細(xì)介紹伺服驅(qū)動器的作用與原理。 一、伺服驅(qū)動器的作用 伺服驅(qū)動器是一種用于控制伺服電機(jī)
2024-01-17 17:52:4510672 伺服電機(jī)原理與應(yīng)用 一、伺服電機(jī)原理 伺服電機(jī)是一種控制系統(tǒng),通過傳感器接受反饋信號,將輸出信號與輸入信號進(jìn)行比較,并通過控制器對輸出信號進(jìn)行調(diào)整,以實(shí)現(xiàn)精確控制電機(jī)運(yùn)動的位置、速度和力矩。伺服電機(jī)
2024-01-22 16:32:261979 伺服電機(jī)是一種能夠根據(jù)控制指令準(zhǔn)確運(yùn)動的電機(jī),其工作原理基于電機(jī)的轉(zhuǎn)矩及速度反饋。 伺服電機(jī)的工作原理可以從以下幾個方面來講解: 1.電機(jī)原理 伺服電機(jī)一般是由電機(jī)、編碼器、減速機(jī)和控制器組成。電機(jī)
2024-01-31 10:49:284578 伺服電機(jī)是一種特殊的電機(jī),能夠根據(jù)控制信號的反饋信息來調(diào)整輸出轉(zhuǎn)速和位置,具有較高的精度和響應(yīng)速度,廣泛應(yīng)用于機(jī)械控制系統(tǒng)中。本文將詳細(xì)介紹伺服電機(jī)的結(jié)構(gòu)和工作原理。 一、結(jié)構(gòu) 伺服電機(jī)主要由電機(jī)
2024-02-02 14:20:095941 引言 直流伺服電機(jī)以其高響應(yīng)速度、高精度、高可靠性等優(yōu)點(diǎn),在工業(yè)自動化、機(jī)器人、航空航天等領(lǐng)域得到了廣泛應(yīng)用。直流伺服電機(jī)的控制方式是實(shí)現(xiàn)電機(jī)性能的關(guān)鍵,本文將對直流伺服電機(jī)控制方式的基本形式進(jìn)行
2024-06-05 14:14:591741 。 一、伺服系統(tǒng)的基本組成 伺服系統(tǒng)是一種高性能的自動控制系統(tǒng),主要由伺服電機(jī)、伺服控制器、編碼器等組成。伺服電機(jī)是一種高精度、高響應(yīng)速度的電機(jī),能夠?qū)崿F(xiàn)精確的速度和位置控制。伺服控制器是伺服系統(tǒng)的大腦,負(fù)責(zé)接
2024-06-05 14:57:094037 在工業(yè)自動化和精密控制領(lǐng)域中,伺服驅(qū)動器和伺服控制器是兩個至關(guān)重要的組件,它們各自在伺服系統(tǒng)中扮演著不同的角色。盡管兩者在功能和目的上有所重疊,但在實(shí)際應(yīng)用中,它們之間存在明顯的區(qū)別。本文將對伺服驅(qū)動器和伺服控制器的區(qū)別進(jìn)行詳細(xì)的闡述,以便讀者能夠更清晰地理解兩者的差異。
2024-06-05 15:24:554781 伺服電機(jī)控制器參數(shù)調(diào)整是確保伺服系統(tǒng)正常運(yùn)行和達(dá)到預(yù)期性能的關(guān)鍵步驟。本文將詳細(xì)介紹伺服電機(jī)控制器的參數(shù)調(diào)整方法,包括基本原理、常見參數(shù)、調(diào)整步驟和注意事項等。 第一部分:伺服電機(jī)控制器參數(shù)調(diào)整
2024-06-05 15:47:054648 在現(xiàn)代工業(yè)自動化領(lǐng)域,伺服驅(qū)動器和伺服電機(jī)是兩個不可或缺的關(guān)鍵組件。它們各自扮演著不同的角色,共同構(gòu)成了高精度的運(yùn)動控制系統(tǒng)。本文將詳細(xì)探討伺服驅(qū)動器和伺服電機(jī)的區(qū)別,以便讀者能夠更深入地理解它們的工作原理和應(yīng)用場景。
2024-06-06 18:00:276041 PLC(可編程邏輯控制器)是一種廣泛應(yīng)用于工業(yè)自動化領(lǐng)域的控制設(shè)備。伺服電機(jī)作為執(zhí)行元件,可以通過PLC進(jìn)行精確控制。以下是關(guān)于PLC控制伺服電機(jī)的指令的詳細(xì)介紹。 概述 PLC控制伺服電機(jī)
2024-06-12 11:39:264675 伺服控制器,作為工業(yè)自動化和精密控制領(lǐng)域的核心部件,其工作原理和基本結(jié)構(gòu)對于理解和應(yīng)用伺服系統(tǒng)至關(guān)重要。本文將詳細(xì)闡述伺服控制器的工作原理,并通過分析其基本結(jié)構(gòu),進(jìn)一步揭示其工作機(jī)制和性能特點(diǎn)。
2024-06-13 16:31:204076 伺服驅(qū)動器對伺服電機(jī)的控制要求是一個復(fù)雜而深入的話題。以下是關(guān)于伺服驅(qū)動器對伺服電機(jī)控制要求的概述: 精確性 :伺服驅(qū)動器需要能夠精確地控制電機(jī)的位置、速度和加速度,以滿足高精度應(yīng)用的需求。 穩(wěn)定性
2024-06-14 15:24:451853 伺服電機(jī)是一種高精度、高響應(yīng)速度的電機(jī),廣泛應(yīng)用于工業(yè)自動化、機(jī)器人、航空航天等領(lǐng)域。伺服電機(jī)的控制方式有很多種,其中脈沖控制是一種常見的控制方式。 伺服電機(jī)的基本概念 伺服電機(jī)是一種將電能轉(zhuǎn)換
2024-07-14 10:37:312468 其精確控制的關(guān)鍵,本文將介紹伺服電機(jī)轉(zhuǎn)速調(diào)整的方法。 伺服電機(jī)基本原理 2.1 伺服電機(jī)的分類 伺服電機(jī)按照工作原理可以分為直流伺服電機(jī)和交流伺服電機(jī)兩大類。直流伺服電機(jī)采用直流電源供電,具有結(jié)構(gòu)簡單、控制方便等優(yōu)
2024-07-14 10:44:473990 方式主要有模擬控制和數(shù)字控制兩種。 2. PLC與伺服電機(jī)的連接 PLC(可編程邏輯控制器)是一種用于工業(yè)自動化控制的設(shè)備,可以通過編程實(shí)現(xiàn)對伺服電機(jī)的控制。PLC與伺服電機(jī)的連接通常包括: 輸入/輸出接口:PLC通過輸入/輸出接口與伺服電機(jī)的驅(qū)動
2024-08-19 14:51:515558 電子發(fā)燒友網(wǎng)站提供《使用MSP430? MCU的伺服電機(jī)控制器.pdf》資料免費(fèi)下載
2024-10-09 14:14:432 、控制方式和反饋機(jī)制。 伺服電機(jī)的構(gòu)造 伺服電機(jī)主要由轉(zhuǎn)子、定子、編碼器、驅(qū)動器和控制器組成。轉(zhuǎn)子是電機(jī)的旋轉(zhuǎn)部分,通常由永磁材料制成,以產(chǎn)生磁場。定子是電機(jī)的固定部分,通常由硅鋼片和繞組組成,用于產(chǎn)生磁場和傳
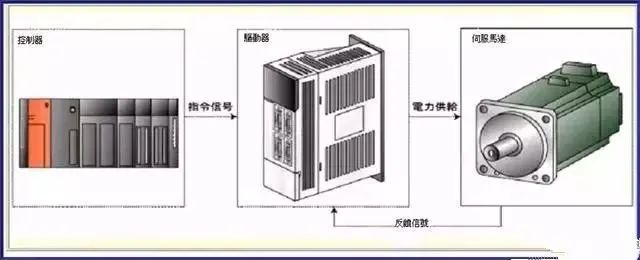
2024-10-22 10:58:133547 補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)能夠?qū)㈦妷盒盘栟D(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速,用以驅(qū)動控制對象,從而實(shí)現(xiàn)對機(jī)械運(yùn)動的精確控制。伺服電機(jī)的工作原理可以簡單概括為:輸入控制信號→伺服控制器→伺服電機(jī)→輸出運(yùn)動。 伺服電機(jī)系統(tǒng)主要由電機(jī)本體、驅(qū)
2024-10-22 16:58:204136 :伺服驅(qū)動器接收來自控制系統(tǒng)的指令信號,這些信號可能是模擬信號(如電壓或電流)或數(shù)字信號(如脈沖序列)。 信號轉(zhuǎn)換 :驅(qū)動器內(nèi)部的控制電路將這些信號轉(zhuǎn)換為電機(jī)可以理解的控制信號,如PWM(脈寬調(diào)制)信號。 電流控制 :伺
2024-11-04 15:04:053202 實(shí)現(xiàn)對機(jī)器人關(guān)節(jié)的精確控制。伺服電機(jī)通常包括一個轉(zhuǎn)子、定子、編碼器和控制器。編碼器提供實(shí)時反饋,控制器根據(jù)反饋信號調(diào)整電機(jī)的運(yùn)行,以確保精確的位置和速度控制。 伺服電機(jī)的優(yōu)勢 精確控制 :伺服電機(jī)能夠?qū)崿F(xiàn)精確的速
2024-11-20 09:53:223255 伺服系統(tǒng)工作原理解析 伺服系統(tǒng)是一種可以按照外部指令進(jìn)行人們所期望的運(yùn)動的自動控制系統(tǒng),它能使物體的位置、方位、狀態(tài)等輸出被控量跟隨輸入目標(biāo)(或給定值)的變化而變化。伺服系統(tǒng)主要由伺服驅(qū)動器、編碼器
2024-12-10 10:12:042962 在自動化控制系統(tǒng)中,電機(jī)控制器和伺服系統(tǒng)是實(shí)現(xiàn)精確運(yùn)動控制的關(guān)鍵組件。電機(jī)控制器負(fù)責(zé)接收控制信號并驅(qū)動電機(jī),而伺服系統(tǒng)則確保電機(jī)按照預(yù)定的軌跡和速度精確運(yùn)動。 電機(jī)控制器的基本概念 電機(jī)控制器是一種
2025-01-22 09:35:461595 。本文將從基礎(chǔ)原理到前沿技術(shù),系統(tǒng)梳理伺服電機(jī)的控制方式及其應(yīng)用特點(diǎn)。 一、伺服控制的基本架構(gòu) 伺服系統(tǒng)由伺服電機(jī)、驅(qū)動器、控制器和反饋裝置構(gòu)成閉環(huán)控制回路。其核心是通過實(shí)時比較目標(biāo)指令與反饋信號的偏差,采用PID算
2025-12-01 07:37:18439 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論