 電子發燒友App
電子發燒友App












 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
?
在本教程中,我們將學習如何使用電容式觸摸傳感器、繼電器模塊和 Visuino 打開和關閉 Hendheld 電池風扇。
。
第 1 步:您需要什么
?
- Arduino UNO(或任何其他 Arduino)
- 跳線
- 電容式觸摸傳感器
- 帶有鱷魚夾的電線
- 電池風扇(或其他一些電池供電的設備)
- Visuino 程序:下載 Visuino
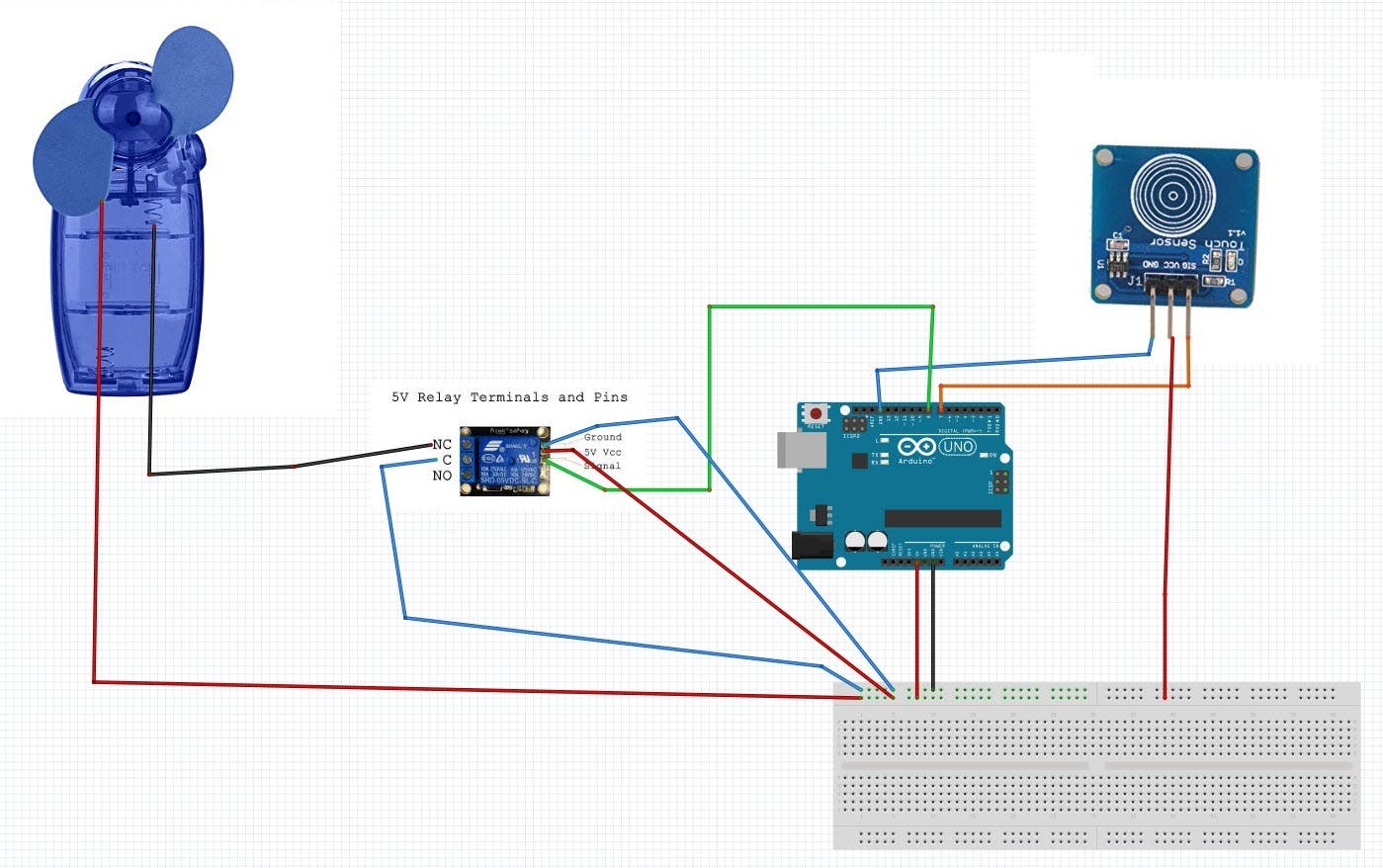
第 2 步:電路
?
- 將電容式觸摸傳感器“信號”引腳連接到 Arduino 數字引腳[7]
- 將電容式觸摸傳感器“VCC”引腳連接到引腳 [5V]
- 將電容式觸摸傳感器“GND”引腳連接到引腳 [GND]
- 將繼電器“信號”引腳連接到 Arduino 數字引腳[8]
- 將繼電器“VCC”引腳連接到引腳[5V]
- 將繼電器“GND”引腳連接到引腳[GND]
- 將 Hendheld“正極”引腳連接到引腳 [5V]
- 將 Hendheld“負極”引腳連接到繼電器引腳 [NC]
- 將繼電器引腳[C] 連接到引腳[GND]
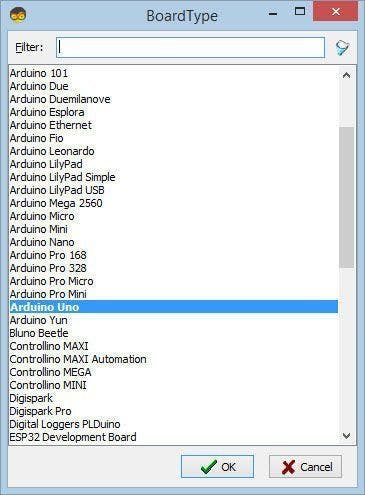
第 3 步:啟動 Visuino,并選擇 Arduino UNO 板類型
?
?
?
?
1 / 2
?
要開始對 Arduino 進行編程,您需要從此處安裝 Arduino IDE:https ://www.arduino.cc/ 。
請注意,Arduino IDE 1.6.6 中存在一些嚴重錯誤。確保您安裝的是 1.6.7 或更高版本,否則本教程將無法運行!如果您尚未按照本教程中的步驟設置 Arduino IDE 以對 Arduino UNO 進行編程!Visuino:https ://www.visuino.eu也需要安裝。啟動Visuino,如第一張圖所示點擊Visuino中Arduino組件(圖1)上的“工具”按鈕出現對話框時,選擇“Arduino UNO”,如圖2所示
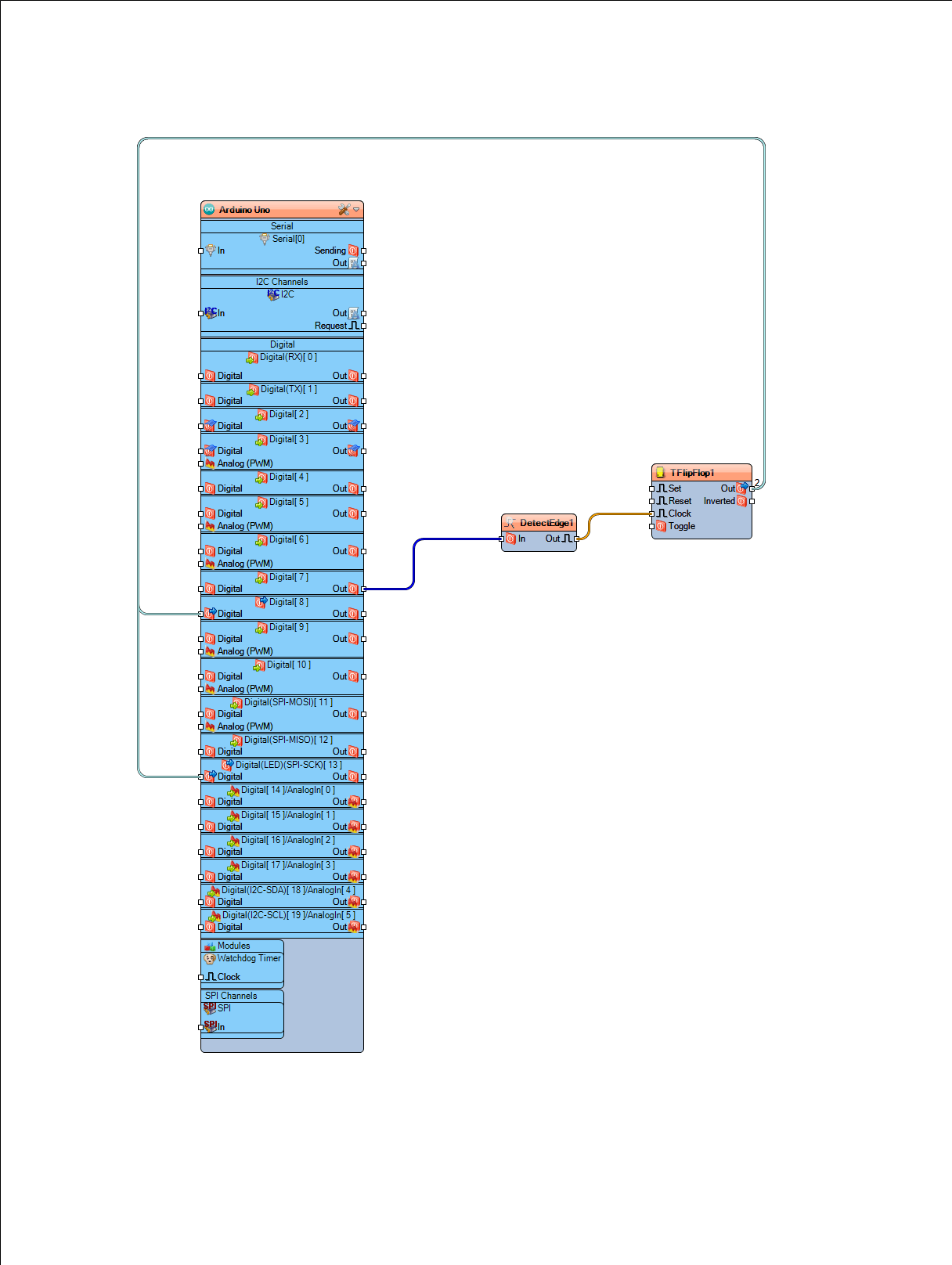
第 4 步:在 Visuino 中添加組件
?
- 添加“Detect Edge”組件并在屬性窗口“Rising”下設置為“True”
- 添加“(T)觸發器”組件
- 將 Arduino 數字輸出引腳 [7] 連接到“DetectEdge1”組件引腳[輸入]
- 將“DetectEdge1”組件引腳[Out]連接到“TFlipFlop1”組件引腳[Clock]
- 將“TFlipFlop1”組件引腳[Out] 連接到 Arduino Digital IN 引腳[8]
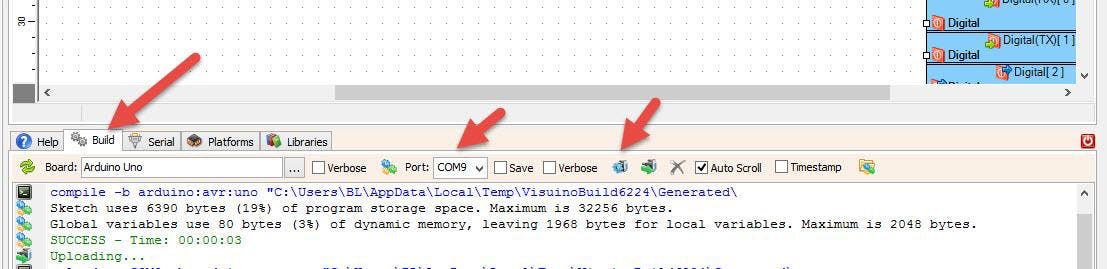
第 5 步:生成、編譯和上傳 Arduino 代碼
?
在 Visuino 中,在底部單擊“構建”選項卡,確保選擇了正確的端口,然后單擊“編譯/構建和上傳”按鈕。
第 6 步:播放
如果您為 Arduino UNO 模塊供電,如果您觸摸“電容式觸摸”傳感器或關閉風扇,風扇應該會旋轉。
恭喜!您已經使用 Visuino 完成了您的項目。還附上了我為本教程創建的 Visuino 項目。您可以在 Visuino 中下載并打開它:https://www.visuino.eu
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 帶電容式觸摸板的無線遙控器,使用MSP430F51x2
- CTSU 電容式觸摸電極設計指南
- HTTM系列電容式觸摸模塊說明書 7次下載
- 電容式觸摸感應控制芯片DLT8S04A 19次下載
- 電容式觸摸感應控制芯片DLT8M04S 2次下載
- CLJ-C44-20AJ臺信鐵氟龍電容式接近開關 20次下載
- 基于電容式感應原理的觸摸芯片VK3604 19次下載
- 基于電容式感應原理的觸摸芯片VK3603 19次下載
- 滑條+獨立鍵電容式觸摸芯片JG9108S3 11次下載
- 電容式觸摸屏的基本結構資料下載
- YF2201A電容式觸摸感應芯片的數據手冊免費下載 9次下載
- MSP430電容式觸摸軟件庫 8次下載
- 電容式 觸摸開關 131次下載
- 電容式觸摸感應IC 3次下載
- 電容式觸摸感應開關設計及實現 98次下載
- 手持式RFID讀寫器可以當pda手持終端用嗎 1k次閱讀
- 基于Arduino的數字電容式觸摸傳感器設計 3.7k次閱讀
- 如何為BeagleBone Black添加電容式觸控顯示模塊 4k次閱讀
- 基于stm8系列8位通用微控制器平臺的電容式觸摸傳感方案 3.7k次閱讀
- 手持式激光焊接機優缺點 3.1w次閱讀
- 手持式光譜儀能打出碳含量嗎 1w次閱讀
- dfrobot7寸LCD電容式觸摸屏簡介 4k次閱讀
- 電容式觸摸屏參數_電容式觸摸屏分類 1.7w次閱讀
- 電容式觸摸屏的結構原理 1.7w次閱讀
- 電容式接近開關的工作原理 6.6w次閱讀
- 電容式觸摸界面實現手套觸摸的技術分析 2.2k次閱讀
- 電容式觸摸屏控制器介紹 3.7k次閱讀
- 電容式觸摸屏的的主要應用及缺陷 4.3k次閱讀
- 淺析電容式觸摸技術 2.8k次閱讀
- 電容式感應工作原理及設計分析 8.2k次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費



 工商網監
工商網監
評論