論述伺服驅(qū)動控制器的實(shí)現(xiàn)方法,通過對ARM+FPGA+DSP架構(gòu)的多CPU控制器的具體分析將其原理和優(yōu)勢展現(xiàn)出來;這種架構(gòu)控制器系統(tǒng)分工明確,提高了算法的實(shí)時性;提高了控制器對外接口EtherCAT
2022-09-20 15:34:35 3078
3078 在本教程中,我們將了解伺服電機(jī)以及如何將伺服與 MSP430 連接。MSP-EXP430G2 是德州儀器提供的開發(fā)工具,又名 LaunchPad,用于學(xué)習(xí)和練習(xí)如何使用其微控制器。該板屬于 MSP430 超值系列類別,我們可以在其中對所有 MSP430 系列微控制器進(jìn)行編程。
2022-11-14 16:33:003742 
伺服電機(jī)控制器為何要整定?何時需要整定?
2021-09-29 06:11:22
伺服電機(jī)控制器與步進(jìn)電機(jī)控制器有啥不一樣?
2021-02-25 07:42:10
伺服驅(qū)動器工作原理伺服驅(qū)動器控制方式
2021-02-05 07:05:04
無刷直流電機(jī)的工作原理是什么?ESC(電子速度控制器)的工作原理是什么?
2021-07-21 08:44:25
Labview 軟件讀取伺服控制器數(shù)據(jù),要求讀取速度不小于1K/s,電腦和控制器網(wǎng)線連接,請問哪種通訊方式可以達(dá)到,請朋友們指導(dǎo)一下,非常感謝。
2017-06-21 21:10:35
ST電機(jī)庫的PID控制器工作原理是什么?
2021-10-08 07:18:09
TMCM1636伺服驅(qū)動控制器有何功能?TMCM1636伺服驅(qū)動控制器有哪些應(yīng)用?
2021-10-08 08:32:46
三菱伺服控制器所有的報警代碼以及處理方法是什么?
2021-11-15 06:40:55
為什么用PLC控制伺服控制器一給使能電機(jī)就轉(zhuǎn)(此時PLC還沒運(yùn)行呢),控制器和電機(jī)都已經(jīng)測試好了
2023-12-11 07:00:33
USS是什么意思?USS通信與串口通信區(qū)別在什么地方?運(yùn)動控制器PLC的結(jié)構(gòu)是如何構(gòu)成的?什么是伺服驅(qū)動器 ?
2021-06-28 08:03:17
目前伺服控制器的設(shè)計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會大打折扣,因此以FPGA為控制核心,對應(yīng)用于機(jī)載三軸伺服控制平臺的控制器進(jìn)行了設(shè)計與優(yōu)化。
2019-07-16 07:41:04
目前伺服控制器的設(shè)計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會大打折扣,因此以FPGA為控制核心,對應(yīng)用于機(jī)載三軸伺服控制平臺的控制器進(jìn)行了設(shè)計與優(yōu)化。
2019-07-08 06:28:36
怎樣去設(shè)計三軸伺服控制器?如何對三軸伺服控制器的性能進(jìn)行測試?
2021-04-28 06:04:11
晶體的特點(diǎn)及參數(shù)有哪些?在晶體的應(yīng)用中,需要考慮哪些問題?硅頻率控制器SFC的工作原理是什么?有哪些參數(shù)及應(yīng)用?
2021-04-19 09:38:24
伺服電機(jī)的主要應(yīng)用領(lǐng)域是什么?什么是伺服電機(jī)的速度控制模式?什么是伺服電機(jī)的位置控制模式?
2021-06-28 09:06:45
運(yùn)動控制器控制伺服電機(jī)的指令方式運(yùn)動控制器以模擬量信號控制伺服電機(jī)的調(diào)試步驟
2021-01-21 07:15:51
作者:何國軍 陳維榮 劉小強(qiáng) 孫叢君運(yùn)動控制技術(shù)是數(shù)控機(jī)床的關(guān)鍵技術(shù),其技術(shù)水平的高低將直接影響一個國家裝備制造業(yè)的發(fā)展水平。目前,多軸伺服控制器越來越多地運(yùn)用在運(yùn)動控制系統(tǒng)中,具有較高的集成度
2019-07-31 08:15:26
溫度伺服控制系統(tǒng)是數(shù)碼變溫空調(diào)的一個重要的子系統(tǒng),是數(shù)碼變溫空調(diào)的執(zhí)行機(jī)構(gòu)。本文根據(jù)數(shù)碼變溫空調(diào)的工作原理,提出了一種基于ARM 微控制器的全數(shù)字式溫度伺服控制系統(tǒng)
2009-07-07 15:09:26 27
27 本文在簡要介紹IMS 系列伺服控制器的基礎(chǔ)上,討論了控制器的RS-232C 通信協(xié)議,并詳細(xì)闡述了如何在C++ Builder 5.0 中利用MSComm 控件實(shí)現(xiàn)控制器與上位機(jī)之間的串行通信,最后舉一
2009-08-17 09:48:5310 本文提出了一種新的考慮到anti-windup的永磁交流伺服系統(tǒng)速度控制器的優(yōu)化設(shè)計方案,補(bǔ)償了速度控制器整定的非線性。通常采用傳統(tǒng)的線性分析方法獲得控制器參數(shù),然后通過嘗試
2010-02-21 17:11:0422 主令控制器工作原理
主令控制器的結(jié)構(gòu)
圖
2008-11-20 17:24:2915162 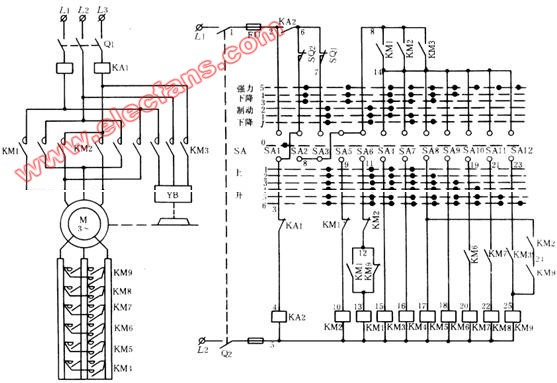
微控制器工作原理
1. 引言 2. 什么是微處理器?
2009-08-21 16:04:013377 為解決模擬電路在 伺服控制 系統(tǒng)中存在的器件漂移、抗干擾能力差、變量不易監(jiān)視等諸多不足,對某船載衛(wèi)通站伺服環(huán)路模擬控制器進(jìn)行了分析,提出計算機(jī)控制代替模擬控制的方法
2011-08-29 15:13:1643 基于模糊PID控制的導(dǎo)彈舵機(jī)伺服控制器-2011。
2016-04-05 16:32:3546 基于自適應(yīng)模糊PID算法的切紙機(jī)伺服控制器設(shè)計-2010。
2016-04-06 09:52:5915 模糊PID技術(shù)在高速液壓伺服控制器中的應(yīng)用研究。
2016-04-06 11:21:2418 基于自抗擾控制器的交流直線永磁同步伺服電機(jī)速度控制系統(tǒng)。
2016-04-25 10:00:2719 基于矢量控制的高性能交流電機(jī)速度伺服控制器的FPGA實(shí)現(xiàn)
2016-04-26 10:03:3126 伺服驅(qū)動器(servo drives)又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機(jī)的一種控制器,其作用類似于變頻器作用于普通交流馬達(dá),屬于伺服系統(tǒng)的一部分,主要應(yīng)用于高精度的定位系統(tǒng)。
2017-06-08 09:13:0054916 基于DSP_CPLD的四電動舵機(jī)伺服控制器設(shè)計
2017-10-20 08:24:044 TRINAMIC公司推出TMCM-1633-CANopen,這是一種新型緊湊型300W BLDC伺服控制器模塊,具有與工業(yè)標(biāo)準(zhǔn)CANopen協(xié)議兼容的正弦換向功能。
2017-12-01 10:31:2511201 伺服驅(qū)動器是用來控制伺服電機(jī)的一種控制器,一般是通過位置、速度和力矩3種方式對電機(jī)進(jìn)行控制,實(shí)現(xiàn)高精度的系統(tǒng)定位。目前,伺服控制器CPU的架構(gòu)主要有:1)單CPU架構(gòu)ARM( acorn RISC
2018-01-29 16:33:531 氣動伺服技術(shù)具有清潔、功率質(zhì)量比大、維護(hù)簡便等優(yōu)勢,在機(jī)器人、醫(yī)療機(jī)械等場合應(yīng)用廣泛。本課題采用課題組現(xiàn)有高性能控制算法原型,加以改進(jìn)后,研發(fā)了集成先進(jìn)控制策略的氣動伺服控制器,測試表明是國內(nèi)高性能
2018-01-30 18:00:522 伺服定位控制可以在PLC中實(shí)現(xiàn),也可以在伺服控制器中實(shí)現(xiàn)。用PLC實(shí)現(xiàn),可選用317-T的工藝型CPU,內(nèi)置定位控制功能。PLC通過通訊向伺服發(fā)送速度指令,并將伺服的反饋取到PLC中,在PLC中實(shí)現(xiàn)
2018-02-01 15:17:0411613 本文檔內(nèi)容介紹了基于STM32簡易電機(jī)伺服控制器,供參考
2018-03-05 11:29:04111 本文首先介紹了運(yùn)動控制器的架構(gòu)組成及優(yōu)缺點(diǎn),其次介紹了運(yùn)動控制器的功能,最后闡述了運(yùn)動控制器的工作原理及應(yīng)用。
2018-04-23 18:40:2238999 伺服的結(jié)構(gòu)是怎樣的?一個最簡易的伺服控制單元,就是一個伺服電機(jī)加伺服控制器,今天就來解析下伺服電機(jī)與伺服控制器。
2018-07-04 10:52:4244570 目前伺服控制器的設(shè)計多以DSP或MCU為控制核心,伺服控制器是用來控制伺服馬達(dá)的一種器件,一般是通過位置、速度和力矩三種方式對伺服馬達(dá)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動系統(tǒng)定位。 從結(jié)構(gòu)上看,伺服控制器和變頻器差不多,但對元器件的要求精度和可靠性更高。
2018-10-07 11:41:415434 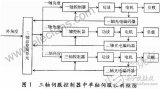
步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2018-09-16 09:48:193411 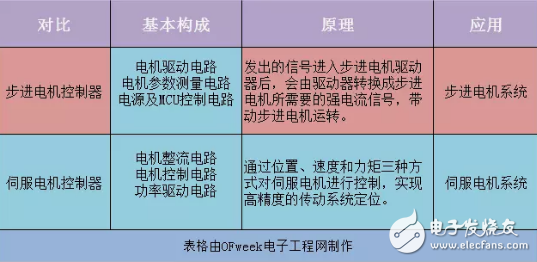
這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動控制器給伺服驅(qū)動器發(fā)送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號;伺服驅(qū)動器工作在位置控制模式,位置閉環(huán)由伺服驅(qū)動器完成。日系伺服和國產(chǎn)伺服產(chǎn)品大都采用這種模式。其優(yōu)點(diǎn)是系統(tǒng)調(diào)試簡單,不易產(chǎn)生干擾,但缺點(diǎn)是伺服系統(tǒng)響應(yīng)稍慢。
2019-02-17 11:16:2712493 技術(shù)需知伺服電機(jī)調(diào)試的基本步驟, 運(yùn)動控制器控制伺服電機(jī)通常采用兩種指令方式: 1、數(shù)字脈沖 這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動控制器給伺服驅(qū)動器發(fā)送脈沖/方向或CW/CCW類型的脈沖指令信號
2020-06-12 14:45:486476 伺服電機(jī)控制器是數(shù)控系統(tǒng)及其他相關(guān)機(jī)械控制領(lǐng)域的關(guān)鍵器件,一般是通過位置、速度和力矩三種方式對伺服馬達(dá)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動系統(tǒng)定位。 伺服控制相關(guān)技術(shù)已經(jīng)成為關(guān)系國家裝備技術(shù)水平的重要參考。
2019-10-01 09:28:005459 利用 VHDL 硬件描述語言在 FPGA 中設(shè)計直流伺服電機(jī)控制器。其含 4 路 PWM 控制器,每個控制器均分配一個 ID,當(dāng)?shù)刂肪€ Address 選中某個 ID 時,表明對該 PWM 控制器
2020-05-11 08:00:0014 伺服的結(jié)構(gòu)是怎樣的?一個最簡易的伺服控制單元,就是一個伺服電機(jī)加伺服控制器,今天就來解析下伺服電機(jī)與伺服控制器。
2020-09-24 10:54:3415281 
介紹了一種用基于FPGA的DSP技術(shù)來設(shè)計電液伺服系統(tǒng)控制器的方法。該方法克服了傳統(tǒng)伺服控制器的一些不足, 可將許多復(fù)雜的實(shí)時控制算法硬件化實(shí)現(xiàn), 并根據(jù)控制效果的優(yōu)劣調(diào)整控制算法, 從而
2020-11-30 14:02:003077 
步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2020-12-14 20:26:092826 伺服電機(jī)控制器做為伺服電機(jī)的機(jī)械設(shè)備控制器是十分重要的,主要是根據(jù)伺服電機(jī)控制器的實(shí)際操作對伺服電機(jī)開展操縱期限精密度極高的傳動裝置。那麼伺服電機(jī)控制器在安裝流程及其常見問題有什么呢? 1.安裝方向
2021-01-12 16:17:191346 步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2021-01-31 06:17:2415 許多人對伺服電機(jī)控制器的原理一直不理解,不知道它是如何控制的。事實(shí)上看相關(guān)介紹也可以知道看起來特別簡單,真正了解就知道不是這么回事。以下小編介紹其中的原理。 常用的伺服控制系統(tǒng)軟件是閉環(huán)控制系統(tǒng),給
2021-07-11 15:22:497747 控制,實(shí)現(xiàn)高精度的傳動系統(tǒng)定位,是傳動技術(shù)的高端產(chǎn)品。 ? ? 工作原理: ? ? ? ?安川伺服驅(qū)動器維修安川伺服驅(qū)動器是用來控制伺服電機(jī)的,作用類似于變頻器驅(qū)動交流電機(jī),屬于伺服系統(tǒng)的一部分。 ? ? ? ?安川伺服驅(qū)動器采
2021-08-04 09:15:107037 控制,實(shí)現(xiàn)高精度的傳動系統(tǒng)定位,是傳動技術(shù)的高端產(chǎn)品。 ? ? 工作原理: ? ? ? ?安川伺服驅(qū)動器維修安川伺服驅(qū)動器是用來控制伺服電機(jī)的,作用類似于變頻器驅(qū)動交流電機(jī),屬于伺服系統(tǒng)的一部分。 ? ? ? ?安川伺服驅(qū)動器采
2021-08-06 20:26:546531 眾所周知, 直流伺服電機(jī) 控制器和編碼器是組成伺服控制系統(tǒng)的必要部件,直流伺服電機(jī)控制器主要通過讀取編碼器來獲得:伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速大小、轉(zhuǎn)子位置、轉(zhuǎn)子角度。可完成伺服電機(jī)轉(zhuǎn)速、電機(jī)轉(zhuǎn)速大小、轉(zhuǎn)角位置
2021-08-27 14:55:534603 隨著公司低壓直流伺服電機(jī)控制器的銷量增加,客戶反饋伺服控制器速度開環(huán)和速度閉環(huán)區(qū)別不是很明白,現(xiàn)對客戶反饋的速度閉環(huán)問題匯總整理及解決方案如下。
2021-09-08 09:16:553136 交流伺服神經(jīng)元PID控制器研究(深圳市澳萊特電源技術(shù)有限公司)-該文檔為交流伺服神經(jīng)元PID控制器研究總結(jié)文檔,是一份不錯的參考資料,感興趣的可以下載看看,,,,,,,,,,,,,,,,,
2021-09-22 15:09:1911 什么是伺服驅(qū)動器?伺服驅(qū)動器是用來控制伺服電機(jī)的一種控制器,被廣泛應(yīng)用于自動化設(shè)備中,那么伺服驅(qū)動器一般要設(shè)置哪些參數(shù)?
2022-01-17 10:41:0426386 伺服電機(jī)在各種自動化生產(chǎn)項目里比較常見,各種機(jī)械臂、AGV車的活動機(jī)構(gòu),都是伺服電機(jī)在扮演。伺服電機(jī)和以往的其他電機(jī)相比,采用了閉環(huán)控制,即接收到控制器的控制脈沖后,在電機(jī)運(yùn)動的同時,也會生成一個
2022-06-08 10:06:175970 伺服電機(jī)在各種自動化生產(chǎn)項目里比較常見,各種機(jī)械臂、AGV車的活動機(jī)構(gòu),都是伺服電機(jī)在扮演。伺服電機(jī)和以往的其他電機(jī)相比,采用了閉環(huán)控制,即接收到控制器的控制脈沖后,在電機(jī)運(yùn)動的同時,也會生成一個脈沖。
2022-06-08 10:20:372372 電子發(fā)燒友網(wǎng)站提供《藍(lán)牙伺服控制器.zip》資料免費(fèi)下載
2022-07-04 14:34:111 電子發(fā)燒友網(wǎng)站提供《4伺服燈開關(guān)控制器板開源分享.zip》資料免費(fèi)下載
2022-08-18 09:41:181 伺服電機(jī)的工作原理是脈沖寬度調(diào)制(PWM),其旋轉(zhuǎn)角度由施加到其控制引腳的脈沖持續(xù)時間控制。在本教程中,我們將使用 PWM 技術(shù)通過 ATtiny13 微控制器控制伺服電機(jī)。因此,在繼續(xù)之前,我們將首先了解PWM、伺服電機(jī)以及如何使用 Arduino Board 對 ATtiny13 進(jìn)行編程。
2022-08-26 15:40:385775 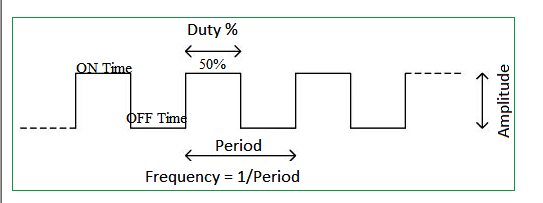
伺服驅(qū)動器(servo drives)又稱為“伺服控制器”、“伺服放大器”,是用來控制伺服電機(jī)的一種控制器,其作用類似于變頻器作用于普通交流馬達(dá),屬于伺服系統(tǒng)的一部分,主要應(yīng)用于高精度的定位系統(tǒng)
2022-10-09 14:38:476708 “由PLC+伺服控制器+伺服電機(jī)(配套設(shè)備)+編碼器(外部設(shè)備端)組成的全閉環(huán)系統(tǒng),如何實(shí)現(xiàn)??我的方法是由PLC無限脈沖給伺服器,當(dāng)達(dá)到要求工藝位置(外部編碼器連接至PLC)時PLC停止脈沖輸出,但實(shí)際停連位置不夠準(zhǔn)確,大概是由于,達(dá)到位置再停止信號會因為伺服器的減速停車而誤差!!”
2023-02-06 17:33:195778 伺服電機(jī)是一種可以通過控制器精確地控制位置、速度和加速度的電機(jī)。伺服電機(jī)通常由電機(jī)、編碼器、控制器等部分組成。控制器根據(jù)編碼器反饋的位置信息,調(diào)節(jié)電機(jī)的驅(qū)動電流,從而控制電機(jī)的位置和運(yùn)動。
2023-03-03 11:06:303440 伺服電機(jī)是一種能夠通過精確控制電機(jī)轉(zhuǎn)速、位置和加速度等參數(shù)來實(shí)現(xiàn)高精度運(yùn)動控制的電機(jī)。
伺服電機(jī)的工作原理與普通的直流電機(jī)或步進(jìn)電機(jī)有很大不同。它由電機(jī)、減速器、編碼器和控制器組成。在工作
2023-03-07 14:46:426073 伺服控制器是一種用于控制電機(jī)運(yùn)動的高精度電子設(shè)備,主要作用是精確控制電機(jī)的位置、速度和加速度等運(yùn)動參數(shù),從而實(shí)現(xiàn)各種運(yùn)動控制任務(wù)。伺服控制器通常使用閉環(huán)控制方式,即通過電機(jī)編碼器或位置傳感器的反饋信號與期望的控制信號進(jìn)行比較,從而調(diào)整輸出信號以控制電機(jī)。
2023-03-09 09:52:064174 伺服控制器(Servo Controller)是一種電子設(shè)備,用于控制伺服電機(jī)的運(yùn)動和位置。伺服電機(jī)是一種精密的電機(jī),具有高精度、高速度和高力矩等特點(diǎn),廣泛應(yīng)用于各種需要精準(zhǔn)控制的自動化設(shè)備和機(jī)器人
2023-03-12 11:12:197266 伺服控制器的參數(shù)設(shè)置涉及到多個方面,包括電氣參數(shù)、控制參數(shù)、運(yùn)動參數(shù)等。下面列舉一些常見的伺服控制器參數(shù)設(shè)置:
電氣參數(shù)設(shè)置:
電機(jī)參數(shù):包括電機(jī)類型、額定電壓、額定電流、額定轉(zhuǎn)速等參數(shù)的設(shè)置和校準(zhǔn)。
驅(qū)動器參數(shù):包括電流限制、速度限制、加速度限制等參數(shù)的設(shè)置。
2023-03-12 11:26:3010456 伺服控制器的調(diào)試需要根據(jù)具體應(yīng)用場景和控制器型號進(jìn)行具體設(shè)置和調(diào)整。一般來說,伺服控制器的調(diào)試包括以下幾個方面:
電氣參數(shù)調(diào)整:包括電機(jī)的參數(shù)設(shè)置和校準(zhǔn)、驅(qū)動器參數(shù)的設(shè)置、電源的輸出調(diào)整等。這些參數(shù)的設(shè)置需要根據(jù)具體控制器的說明書和應(yīng)用場景進(jìn)行調(diào)整。
2023-03-12 11:31:274059 伺服電機(jī)配合伺服控制器精確控制電機(jī)軸的角位置、速度和加速度。這是通過帶有解析器(與控制器的模擬通信)或絕對或增量編碼器(與控制器的數(shù)字通信)的閉環(huán)反饋系統(tǒng)來實(shí)現(xiàn)的,它提供軸的位置信息和速度。
2023-03-25 17:16:442706 一個多軸運(yùn)動控制系統(tǒng)由高階的運(yùn)動控制器(motioncontroller)與低階的伺服驅(qū)動器(servodriver)所組成,運(yùn)動控制器負(fù)責(zé)運(yùn)動控制命令譯碼、各個位置控制軸彼此間的相對運(yùn)動、加減
2023-05-09 10:56:392245 
控制器控制伺服電機(jī)通常采用兩種指令方式:數(shù)字脈沖和模擬信號。數(shù)字脈沖這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動控制器給伺服驅(qū)動器發(fā)送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號;伺服驅(qū)動器工作在位
2023-05-09 14:43:032108 伺服電機(jī)具有獨(dú)特的特性,即根據(jù)輸入信號的脈沖寬度轉(zhuǎn)向特定角度(0,90,180)。這些伺服電機(jī)廣泛用于機(jī)器人應(yīng)用、機(jī)械控制等。通常微控制器將用于控制伺服電機(jī),但偶爾您會發(fā)現(xiàn)一些其他IC用于此目的。本文介紹了伺服電機(jī)的工作原理和工作原理。
2023-06-29 15:44:295160 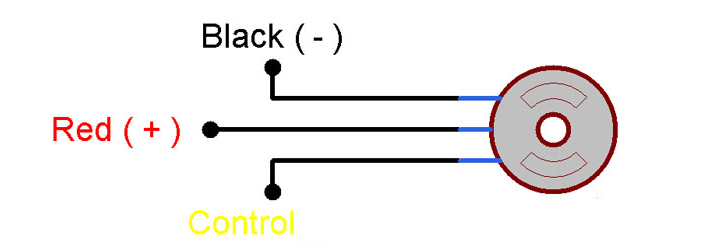
電子發(fā)燒友網(wǎng)站提供《基于FPGA的步進(jìn)電機(jī)伺服控制器設(shè)計.pdf》資料免費(fèi)下載
2023-10-25 09:10:401 電子發(fā)燒友網(wǎng)站提供《伺服環(huán)路控制器的數(shù)字化設(shè)計.pdf》資料免費(fèi)下載
2023-10-26 09:28:050 伺服電機(jī)控制器的類型包括降壓起動器、調(diào)速驅(qū)動器、智能控制器等三種分類,另外控制方面主要以方波控制、正弦波控制等兩種方式。
2023-11-16 10:26:161761 伺服驅(qū)動器維修控制器常見報警故障維修
2023-11-23 10:44:003685 伺服電機(jī)是一種能夠根據(jù)控制指令準(zhǔn)確運(yùn)動的電機(jī),其工作原理基于電機(jī)的轉(zhuǎn)矩及速度反饋。 伺服電機(jī)的工作原理可以從以下幾個方面來講解: 1.電機(jī)原理 伺服電機(jī)一般是由電機(jī)、編碼器、減速機(jī)和控制器組成。電機(jī)
2024-01-31 10:49:284578 伺服控制器編碼器信號輸出接線是伺服系統(tǒng)設(shè)計和安裝過程中的一個重要環(huán)節(jié)。本文將詳細(xì)介紹伺服控制器編碼器信號輸出接線的相關(guān)知識,包括伺服系統(tǒng)的基本組成、編碼器的類型、信號類型、接線方法以及注意事項等
2024-06-05 14:57:094037 伺服控制器編碼器反饋數(shù)值為負(fù)數(shù)是一個相對復(fù)雜的問題,涉及到多個方面。在這篇文章中,我們將從以下幾個方面進(jìn)行詳細(xì)分析:伺服控制器和編碼器的基本概念、編碼器的工作原理、負(fù)數(shù)反饋值的原因、可能
2024-06-05 15:00:485353 電磁干擾 伺服控制器和編碼器在工作過程中會產(chǎn)生電磁場,這些電磁場可能會對編碼器信號產(chǎn)生干擾。同時,伺服系統(tǒng)周圍的其他電子設(shè)備也可能產(chǎn)生電磁干擾,影響編碼器的正常工作。 電源干擾 伺服控制器和編碼器的電源不穩(wěn)定,
2024-06-05 15:09:433898 在工業(yè)自動化和精密控制領(lǐng)域中,伺服驅(qū)動器和伺服控制器是兩個至關(guān)重要的組件,它們各自在伺服系統(tǒng)中扮演著不同的角色。盡管兩者在功能和目的上有所重疊,但在實(shí)際應(yīng)用中,它們之間存在明顯的區(qū)別。本文將對伺服驅(qū)動器和伺服控制器的區(qū)別進(jìn)行詳細(xì)的闡述,以便讀者能夠更清晰地理解兩者的差異。
2024-06-05 15:24:554781 伺服電機(jī)控制器參數(shù)調(diào)整是確保伺服系統(tǒng)正常運(yùn)行和達(dá)到預(yù)期性能的關(guān)鍵步驟。本文將詳細(xì)介紹伺服電機(jī)控制器的參數(shù)調(diào)整方法,包括基本原理、常見參數(shù)、調(diào)整步驟和注意事項等。 第一部分:伺服電機(jī)控制器參數(shù)調(diào)整
2024-06-05 15:47:054646 伺服控制器,作為工業(yè)自動化和精密控制領(lǐng)域的核心部件,其工作原理和基本結(jié)構(gòu)對于理解和應(yīng)用伺服系統(tǒng)至關(guān)重要。本文將詳細(xì)闡述伺服控制器的工作原理,并通過分析其基本結(jié)構(gòu),進(jìn)一步揭示其工作機(jī)制和性能特點(diǎn)。
2024-06-13 16:31:204076 獨(dú)特的功能和特點(diǎn),并在不同的應(yīng)用場景中發(fā)揮著關(guān)鍵作用。本文將詳細(xì)探討伺服控制器和PLC之間的區(qū)別,旨在幫助讀者更深入地理解這兩種控制設(shè)備的工作原理、應(yīng)用場景及其優(yōu)缺點(diǎn)。
2024-06-13 17:26:276134 在工業(yè)自動化領(lǐng)域中,西門子PLC(Programmable Logic Controller,可編程邏輯控制器)與伺服控制器之間的通訊是實(shí)現(xiàn)高效、精確控制的關(guān)鍵環(huán)節(jié)。本文旨在詳細(xì)闡述西門子PLC與伺服控制器之間的通訊方式、原理、配置步驟以及實(shí)際應(yīng)用案例,以期為工程師和技術(shù)人員提供有益的參考。
2024-06-14 15:49:435903 壓力控制器是一種用于監(jiān)測和控制壓力的自動化設(shè)備,廣泛應(yīng)用于工業(yè)、科研、醫(yī)療等領(lǐng)域。本文將詳細(xì)介紹壓力控制器的結(jié)構(gòu)和工作原理。 一、壓力控制器的分類 按測量范圍分類:分為低壓、中壓、高壓和超高壓控制器
2024-06-19 10:47:475168 伺服控制器作為工業(yè)自動化領(lǐng)域的核心部件,其穩(wěn)定性和可靠性對于整個系統(tǒng)的運(yùn)行至關(guān)重要。然而,在實(shí)際應(yīng)用中,伺服控制器也會遇到各種故障。本文將對伺服控制器的常見故障進(jìn)行分析,并提出相應(yīng)的解決方法,以期為相關(guān)技術(shù)人員提供參考。
2024-06-20 18:25:544991 替代ADS1120用于變頻器與伺服控制器
2024-08-07 09:37:251011 
電子發(fā)燒友網(wǎng)站提供《V90伺服控制器回零.pdf》資料免費(fèi)下載
2024-09-02 14:31:070 CAN(Controller Area Network,控制器局域網(wǎng))總線控制器的工作原理涉及多個方面,包括消息傳輸、沖突檢測與解決、總線仲裁等關(guān)鍵機(jī)制。以下是對CAN總線控制器工作原理的詳細(xì)解析,旨在全面闡述其工作原理和機(jī)制。
2024-09-30 11:33:123097 電子發(fā)燒友網(wǎng)站提供《使用MSP430? MCU的伺服電機(jī)控制器.pdf》資料免費(fèi)下載
2024-10-09 14:14:432 伺服電機(jī)是一種高精度的電機(jī),廣泛應(yīng)用于自動化控制、機(jī)器人、精密機(jī)械等領(lǐng)域。它能夠根據(jù)輸入的控制信號,精確地控制電機(jī)的轉(zhuǎn)速、位置和力矩,實(shí)現(xiàn)對機(jī)械系統(tǒng)的精確控制。伺服電機(jī)的工作原理涉及到電機(jī)的構(gòu)造
2024-10-22 10:58:133547 補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)能夠?qū)㈦妷盒盘栟D(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速,用以驅(qū)動控制對象,從而實(shí)現(xiàn)對機(jī)械運(yùn)動的精確控制。伺服電機(jī)的工作原理可以簡單概括為:輸入控制信號→伺服控制器→伺服電機(jī)→輸出運(yùn)動。 伺服電機(jī)系統(tǒng)主要由電機(jī)本體、驅(qū)
2024-10-22 16:58:204136 伺服驅(qū)動器是現(xiàn)代工業(yè)自動化中不可或缺的組件,主要用于控制伺服電機(jī)的運(yùn)行。其核心功能是將輸入的控制信號(如電壓、電流信號)轉(zhuǎn)換為電機(jī)的機(jī)械運(yùn)動。以下是伺服驅(qū)動器的基本工作原理介紹: 輸入信號處理
2024-11-04 15:04:053202 高壓伺服控制器的工作原理基于反饋控制原理,通過不斷比較指令信號和反饋信號,計算出偏差信號,并據(jù)此調(diào)整控制信號,使被控對象的運(yùn)動狀態(tài)逐漸接近指令信號所要求的狀態(tài)。
2025-02-03 15:21:001198 在自動化控制系統(tǒng)中,電機(jī)控制器和伺服系統(tǒng)是實(shí)現(xiàn)精確運(yùn)動控制的關(guān)鍵組件。電機(jī)控制器負(fù)責(zé)接收控制信號并驅(qū)動電機(jī),而伺服系統(tǒng)則確保電機(jī)按照預(yù)定的軌跡和速度精確運(yùn)動。 電機(jī)控制器的基本概念 電機(jī)控制器是一種
2025-01-22 09:35:461595
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論