路徑規劃技術是掃地機器人研究的核心內容之一,機器人定位與環境地圖構建就是為路徑規劃服務的。所謂機器人路徑規劃技術,就是機器人根據自身傳感器對環境的感知,自行規劃出一條安全的運行路線,同時高效完成作業任務。通常,移動機器人路徑規劃需要解決3個問題。
2016-06-06 09:40:41 4864
4864 請各位大神指導,移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉移的?
2016-07-26 13:33:14
機器人路徑規劃學習者一枚,誰了解現在最新的路徑規劃方法及實現,求指教,不勝感激啊。。。。。。。。。。。
2013-09-03 21:15:09
列舉部分學習過程中接觸的部分書籍,部分有中文版,部分有更新版本。1.機器人基礎書籍適合入門的書籍:機器人學機器人建模規劃與控制機器人學、機器視覺與控制——MATLAB算法基礎機器人學導論——分析控制
2019-05-22 06:53:10
機器人的定義是什么?機器人優點和缺點是什么?機器人是由哪些部分組成的?工業機器人的應用有哪些?
2021-07-05 06:48:21
安靜高效的機器人正在接管——阻止它們已經太遲了。不,這不是機器人世界末日另一個可怕的故事。這是關于您下一設計硬件預算和規劃面臨威脅的問題。雖然您無法阻礙技術變革,但是您可以預測其影響。
2019-07-17 08:08:16
機器人的移動通常是從管理機器人總體任務進度的中央處理器發出位置變化請求時開始的。導航系統通過制定行程計劃或軌跡以開始執行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關的任務目標。
2019-09-10 10:44:32
有人會用labview調用python嗎,或者有其他方法能實現這個要求?我在labview做了一個磁場發生的程序,驅動磁機器人運動,而且我這個機器人是繞著一個向量旋轉向前的,就輸入幅值頻率那些就可以
2022-11-18 16:21:25
我現在在做機器人的路徑規劃,想用人工勢場的算法,通過用這個labview仿真,就是給定一些起始點,終點,還有這個障礙物的坐標,中間是這個算法計算出來的一些點,能夠在執行算法的時候用labview描出這些點,最終形成一條規劃好的路徑。有沒有朋友做過,給點意見唄
2017-05-15 15:25:22
LCS的動態規劃算法(自底向上)
2020-05-25 15:06:29
LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。LabVIEW作為一個關鍵技術,在項目中扮演了核心角色
2023-12-21 20:03:18
,電機閉環控制,運動力學受力分析及部件受力分析,矩陣不等式實驗,運動行走倒立擺實驗、。4) 運動算法:路徑規劃,自主定位,運動導航,自建地圖。5) 嵌入式實驗:嵌入式軟件運用及6) 人機交互:腦電波、視覺及肢體等對機器人控制,心理學研究,互聯網、物聯網實驗及信息處理。`
2015-02-12 15:17:18
在未知環境中,也可以展開行動,隨著機器人不斷探索,路徑也會時刻調整。 上述的幾種算法都是目前絕大部分機器人所需要的路徑規劃算法,能夠讓機器人跟人一樣智能,快速規劃A到B點的最短路徑,并在遇到障礙物
2018-08-24 16:56:24
我現在做這個機器人的路徑規劃,有一個人工勢場的算法,已經用C實現算法,請問一下能否用這個labview仿真,就是給定一些起始點,終點,還有這個障礙物的坐標,中間是這個算法計算出來的一些點,能夠在執行算法的時候用labview描出這些點,最終形成一條規劃好的路徑。
2015-04-22 16:04:32
搜索策略等規劃算法,強調了軌跡規劃需要考慮機器人的運動學約束。在軌跡規劃中,機器人需要同時考慮最大曲率、加速度限制等物理約束,生成平滑可行的運動軌跡。強化學習在規劃控制中的應用也很有創新性,通過智能體
2024-12-19 22:26:26
的軌跡規劃是用關節角度的函數來表示機器人軌跡,所以在關節空間內進行軌跡規劃較為簡單,容易根據設計要求來對軌跡進行調整。而對于某些對于路徑和姿態有嚴格要求的作業,如噴涂作業,就須要在笛卡爾空間內進行軌跡
2017-07-12 13:26:00
地圖構建→路徑規劃→動態避障)等等
2. 機器人功能開發
相較于ROS入門21講,書中更是詳細書寫了關于機器人的功能開發,并且十分完善,教程詳盡
傳感器數據處理:機器人通常配備多種傳感器,如激光雷達
2025-04-27 11:24:32
,一次生成深度信息。
自主機器人定位任務的本質是對機器人自身狀態的估計問題,包括位置,朝向,速度等問題。
路徑規劃旨在找到從起點到目標區域的路徑,確保路徑的可行性和最優性。路徑規劃方法包括變分方法,圖搜
2025-01-04 19:22:08
傳感器數據獲取環境信息,規劃路徑并選擇最優路徑到達目的地的算法。運動控制算法是指移動機器人在到達目的地后,根據傳感器數據調整方向和速度的算法。這些算法需要在移動機器人的控制器上實現,并與傳感器、執行器等
2023-06-28 09:36:32
為什么我的電腦max連不上DINI機器人,搜索不到。IP地址已經改過,就是鏈接不上!hardware setup可以搜索到機器人
2015-05-07 16:03:22
算法構建機器人 的運動步態,之后運用六次軌跡規劃算法模擬出六足動物的抬腿擺動軌跡,最后 經由運動學的求逆,運算出每個關節的旋轉角,進而模擬出六足動物的運動步態。
2020-10-13 09:13:11
如何去提高汽車的主動安全性和交通安全性?從算法上解讀自動駕駛是如何實現的?有哪幾種常見的車輛路徑規劃算法?
2021-06-17 10:56:09
動態規劃算法資料。
2017-08-30 20:44:12
移動機器人利用導航技術,獲得機器人的目前所處的位置,結合傳感器技術對周圍外界環境(障礙物等)作實時探測,并根據環境提供的信息規劃一條可行路徑完成達到目標點的任務。移動機器人技術涉及到傳感器技術
2020-11-23 15:08:52
紅外遙控擂臺機器人是中國教育機器人大賽擂臺賽的標準競賽平臺。機器人利用前端QTI傳感器探測黑色場地,避免機器人跑出場地。通過紅外遙控器遙控機器人,將對手推出黑色場地。 重要技術點:場地邊沿探測、紅外遙控解碼、超聲波搜索算法、紅外搜索算法
2016-03-24 10:35:37
; 潔機器人路徑規劃算法,實現了
2013-11-08 22:30:10
是不需要預先探明地圖,機器人可以和人一樣,即使在未知環境中,也可以展開行動,隨著機器人不斷探索,路徑也會時刻調整。 以上是目前大部分移動機器人都需要的路徑規劃算法,而掃地機器人作為最早出現在消費市場
2018-10-10 16:29:21
1、求路徑規劃的代碼源程序2、路徑規劃的學習資料(最好是基于c語言的代碼學習)3、關于基于模糊神經網絡的路徑規劃的算法的C程序的學習4、各種路徑規劃的學習資料也可以
2016-09-25 17:22:47
中游刃有余。D*算法的最大優點是不需要預先探明地圖,機器人可以和人一樣,即使在未知環境中,也可以展開行動,隨著機器人不斷探索,路徑也會時刻調整。以上是目前大部分移動機器人都需要的路徑規劃算法,而掃地機器人
2017-08-01 13:50:56
和擴展都非常方便,既可以面向大學和高職學生,也可以面向中學和中職學生。重要技術點: 狹窄空間的機器人導航、循墻算法、路徑規劃。
2016-03-24 10:43:54
現在做畢業設計,是基于labview的挖掘機器人軌跡規劃與控制,就是用labview來實現軌跡規劃的編程,請教各位,這容易實現嗎?該從哪入手啊?謝謝了!
2013-04-01 14:32:01
怎樣去設計一種基于PID算法的巡線機器人?基于PID算法的巡線機器人有哪些優勢?
2021-07-27 06:54:05
基于采樣的路徑規劃算法,它也能抗干擾,而且消耗資源更少。 黑線規劃出的所有的路徑紅色是連接終點和起點的路徑 控制 控制就是讓機器人動起來,并且動得很精準,主要包括對底盤的運動控制和電機的PID控制
2018-05-11 11:51:27
針對勢場法所固有的幾個缺陷,提出了一種基于勢場法的移動機器人避障路徑規劃算法,并成功應用于未知復雜環境下移動機器人的路徑規劃中。仿真試驗表明:提出的方法具
2009-05-27 12:59:27 30
30 為了提高家用吸塵器使用的效率,并保證安全性和可靠性,提出利用超聲波傳感器來測距的環境信息采集的吸塵器清掃路徑規劃算法。首先本文簡要描述了機器人路徑規劃的目標,超
2009-06-26 11:42:2646 本文介紹了基于神經網絡和微粒群優化算法的移動機器人動態避障路徑規劃算法。通過神經網絡改進的微粒群算法,充分利用了神經網絡的融合性和并行性來提高微粒群算法中適應
2009-07-11 08:52:3118 移動機器人是機器人技術的一個重要領域,是一個集環境感知、動態決策與規劃、行為控制與執行等多功能于一體的綜合系統。動態未知環境下的移動機器人路徑規劃必須基于對傳
2009-07-17 09:22:3318 移動機器人路徑規劃可分為兩種類型:(1)全局路徑規劃;(2)局部路徑規劃。本文分析了Kohonen神經網絡算法及其識別機理,提出了Kohonen神經網絡和BP神經網絡結合起來進行路徑規劃
2009-08-15 09:02:2913 針對移動機器人規避障礙和尋找最優路徑問題,提出了在復雜環境下移動機器人的一種路徑規劃方法。采用了柵格法建立了機器人工作平面的坐標系,整個系統由全局路徑規劃和
2009-12-18 11:58:4328 人工勢場法是進行移動機器人動態路徑規劃時常用的方法,離散控制使得一般勢場力存在缺陷,對系統會產生很大的沖擊,使得機器人的運動軌跡產生大幅度振蕩而且雜亂無章
2010-01-20 14:00:5614 本文對基于空間數據庫的移動機器人路徑規劃算法中引入先裁剪再檢索的思想,在此基礎上提出一種全新的移動機器人路徑規劃算法。該算法能使規劃的路徑成功地得到短的無碰路徑,
2010-02-23 13:51:2513 本文設計了一種六軸機械臂沿空間曲線行走的控制算法。算法使機器人對輸入空間曲線計算出各關節的電機控制命令使機器人沿曲線運動。算法中推導出機器人逆運動學各關節解析
2010-02-23 13:52:4549 提出一種分層路徑規劃算法來解決大范圍海洋環境下的智能水下機器人(AUV)的全局路徑規劃問題。該算法將
2010-03-03 14:52:0118 路徑規劃技術是機器人控制技術研究中的一個重要問題,目前的研究主要分為全局規劃方法和局部規劃方法兩大類。在對一些較有代表性的研究思想及其相關算法分析的基礎上,比
2010-03-03 14:53:3839 提出一個基于插值的路徑規劃算法-插值 A*。此算法可以在每個柵格路徑代價不一致的情況下生成一條平滑路徑。由于大多數基于柵格算法規劃的路徑只能從一個柵格中心到另一柵
2010-03-03 14:59:2616 針對工業機器人的弧焊、切割和涂膠等應用,介紹了視覺工業機器人作業路徑規劃系統。描述了攝像機坐標標定方法,采用圖像采集技術獲取環境信息,運用圖像處理技術對采集的
2010-07-08 15:40:1417 LabVIEW機器人模塊-機器人選板中的特殊算法和API
概覽
本教程對LabVIEW機器人模塊軟件自帶的機器人算法進行介紹。從傳感器直至路徑規劃
2010-03-12 11:20:092903 
小生境遺傳算法的移動機器人路徑優化技術
移動機器人路徑規劃是機器人學的一個重要研究領域,也是人工智能與機器人學的一個結合點。不論是
2010-05-17 13:45:271386 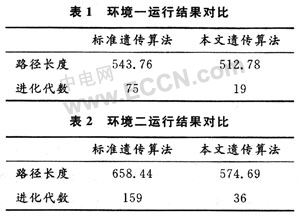
摘要$將遺傳算法應用于機器人的全局路徑規劃#并在AS-R移動機器人上進行了實驗研究% 首 先用柵格法對機器人的工作環境進行劃分# 得到機器人的環境模型 其次采用遺傳算法進行路徑搜
2011-04-06 15:20:0672 針對現存的射門算法的不足之處,射門算法進行了改進,實現機器人射門路徑的全局路徑規劃。首先對滿足非完整約束的運動控制算法進行簡要分析,在此基礎上合理規劃機器人射門路徑上
2011-06-18 17:55:4445 針對基本蟻群算法在機器人路徑規劃問題中容易陷入局部最優的問題,提出了一種改進的蟻群算法,利用遺傳算法加入了變異因子使最優路徑產生變異,從而降低了蟻群算法陷入局部極
2012-08-29 14:48:3678 基于勢場柵格法的機器人全局路徑規劃!資料來源網絡,如有侵權,敬請見
2015-11-30 11:33:0910 基于模糊神經網絡的RoboCup足球機器人局部路徑規劃方法研究
2016-01-04 14:59:050 移動機器人避障路徑規劃方法研究的論文資料。
2016-08-31 17:02:560 基于遺傳算法的分揀機器人最優路徑規劃_文生平
2017-01-28 21:37:156 基于實時交通信息的動態路徑規劃算法性能比較_黃西洲
2017-03-16 10:04:380 未知環境下基于約束點的移動機器人路徑規劃_許重陽
2017-03-15 11:15:272 改進蟻群算法的機器人焊接路徑規劃_王春華
2017-03-19 11:41:391 自 50 年代世界上第一臺機器人裝置誕生以來, 機器人的發展經歷了一個從低級到高級的發展過程。第一代示教再現型機器人, 可以根據人示教的結果再現出動作, 它對于外界的環境沒有感知。在 20 世紀
2017-09-21 15:05:127 基于傳統人工勢場法的機器人路徑規劃存在障礙物附近目標不可達和局部極小點的問題。在研究該問題產生原因的基礎上,提出了一種基于改進人工勢場法的移動機器人路徑規劃算法。該算法在斥力函數中引入了機器人
2017-11-20 14:28:2515 機器人動態規劃是指在某一個給定的運行空間中,移動機器人通過路徑的動態規劃來獲得一條從初始位置到目標位置的最優路徑。環境未知的情況下的機器人路徑規劃是該領域的研究難點。解決路徑規劃的主要研究方法包含
2017-11-28 17:01:360 針對移動機器人在復雜環境下采用傳統方法路徑規劃收斂速度慢和局部最優問題,提出了斥力場下粒子群優化(PSO)的移動機器人路徑規劃算法。首先采用柵格法對機器人的移動路徑進行初步規劃,并將柵格法得到的初步
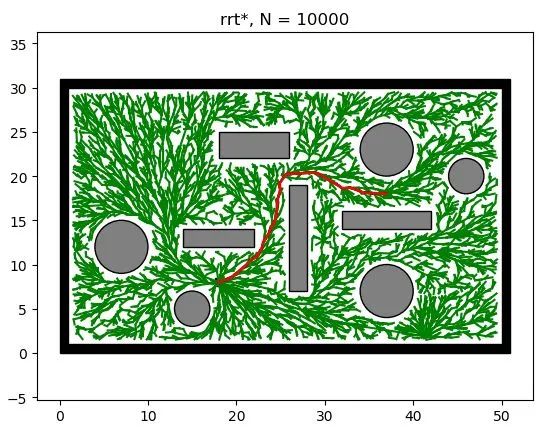
2017-11-29 15:59:060 為解決拖掛式移動機器人系統路徑規劃算法精準性低、穩定性差和無法考慮系統間安全性等的問題,提出一種基于路徑跟蹤方法的路徑規劃算法。該算法融合快速拓展隨機樹( RRT)基本算法和路徑跟蹤控制方程,通過
2017-12-04 14:18:306 狹隘環境下多機器人路徑規劃使用共享資源時,極易產生沖突,優先順序化是解決共享資源沖突的一個重要技術。本文提出了一種基于學習分類器的動態分配優先權的方法,提高機器人團隊的性能。首先機器人通過XCS優化
2018-01-08 14:35:110 路徑規劃在嵌入式智能機器人的研究過程中有重要的意義,隨著我國科學技術的提高.機器人技術得到了廣泛的發展和應用,我國智能機器人技術進步的最顯著特征是嵌入式系統與機器人技術的結合.嵌入式系統具體集成度
2018-01-31 15:01:480 ,這個過程的基礎所在就是路徑規劃。所謂路徑規劃是指按照一定的性能指標,機器人如何從所處的環境中搜索到一條從初始位置開始的實現其自身目的最優或次優路徑。
2018-02-20 16:59:007489 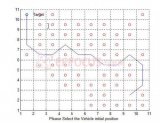
優化算法,使用節點緩存來生成一個引力函數來減少移動代價。最終的算法能夠快速地生成初始路徑,在規劃時間內不斷地改進路徑且通過使用閾值來確保后面路徑都比上次的移動代價更小。雙足機器人仿真實驗中,改進后的算法與初始的
2018-02-10 11:57:310 自主構建環境地圖,具有重要的現實意義。 針對智能機器人如何以最優探測路線自主探測和構建室內環境地圖的問題,提出一種基于滾動窗口的路徑規劃算法。將傳統遍歷構圖的牛耕遍歷方式改進為未知環境的探測策略,并結合滾動窗
2018-02-27 10:02:5018 針對機器人砂帶磨拋復雜曲面葉片問題,對葉片內外型面和進排氣邊的磨拋路徑規劃及后處理技術進行了研究,對復雜曲面葉片的機器人砂帶磨拋路徑規劃的計算效率及加T效率進行了分析,提出了一種將基于等殘留高度法
2018-03-01 15:26:360 路徑規劃技術是掃地機器人研究的核心內容之一,機器人定位與環境地圖構建就是為路徑規劃服務的。所謂機器人路徑規劃技術,就是機器人根據自身傳感器對環境的感知,自行規劃出一條安全的運行路線,同時高效完成作業任務。
2018-08-09 14:28:0029938 針對多 Agent 路徑規劃問題,提出了一個兩階段的路徑規劃算法。首先,利用改進的蟻群算法來為每個Agent規劃出一條從起始點到目標點,不與環境中靜態障礙物碰撞的最優路徑。在蟻群算法的改進中引入反向
2019-04-26 16:24:0310 協同工作,機器人可更好的規劃從起始點到終點的行走路徑。A*與D*機器人路徑規劃算法介紹在實際情況中,機器人路徑規劃除了考慮已知環境和未知環境地圖,還要考慮到動態和靜態環境下的路徑規劃。A*(A-Star
2019-09-06 21:34:513199 有更廣闊的市場空間。 在掃地機器人中,路徑規劃是其最核心的技術,所謂路徑規劃是指機器人根據自身傳感器對環境進行認知,來確定周圍環境和自身位置信息,進而規劃出一條最優運行路線。同時又能高效完成清掃任務。 通常,移動機器人
2020-02-27 11:28:138104 自動駕駛汽車的路徑規劃算法最早源于機器人的路徑規劃研究,但是就工況而言卻比機器人的路徑規劃復雜得多,自動駕駛車輛需要考慮車速、道路的附著情況、車輛最小轉彎半徑、外界天氣環境等因素。
2020-03-08 17:29:0018326 近年來,移動機器人的研究受到了人們的高度重視,人們對于機器人的要求不再局限于簡單的移動,而是希望機器人能夠根據周圍環境變化采取對應措施,做到自主移動的能力。因此,路徑規劃作為移動機器人的一個重要因素
2021-10-14 14:38:362933 為了提高采摘機器人自主導航和路徑規劃能力,提出了基于計算機視覺路徑規劃和RBF神經網絡自適應逼近算法的導航方法。使用圖像分割,平滑處理和邊緣檢測技術,根據圖像像素灰度值確定了導航線的位置,利用
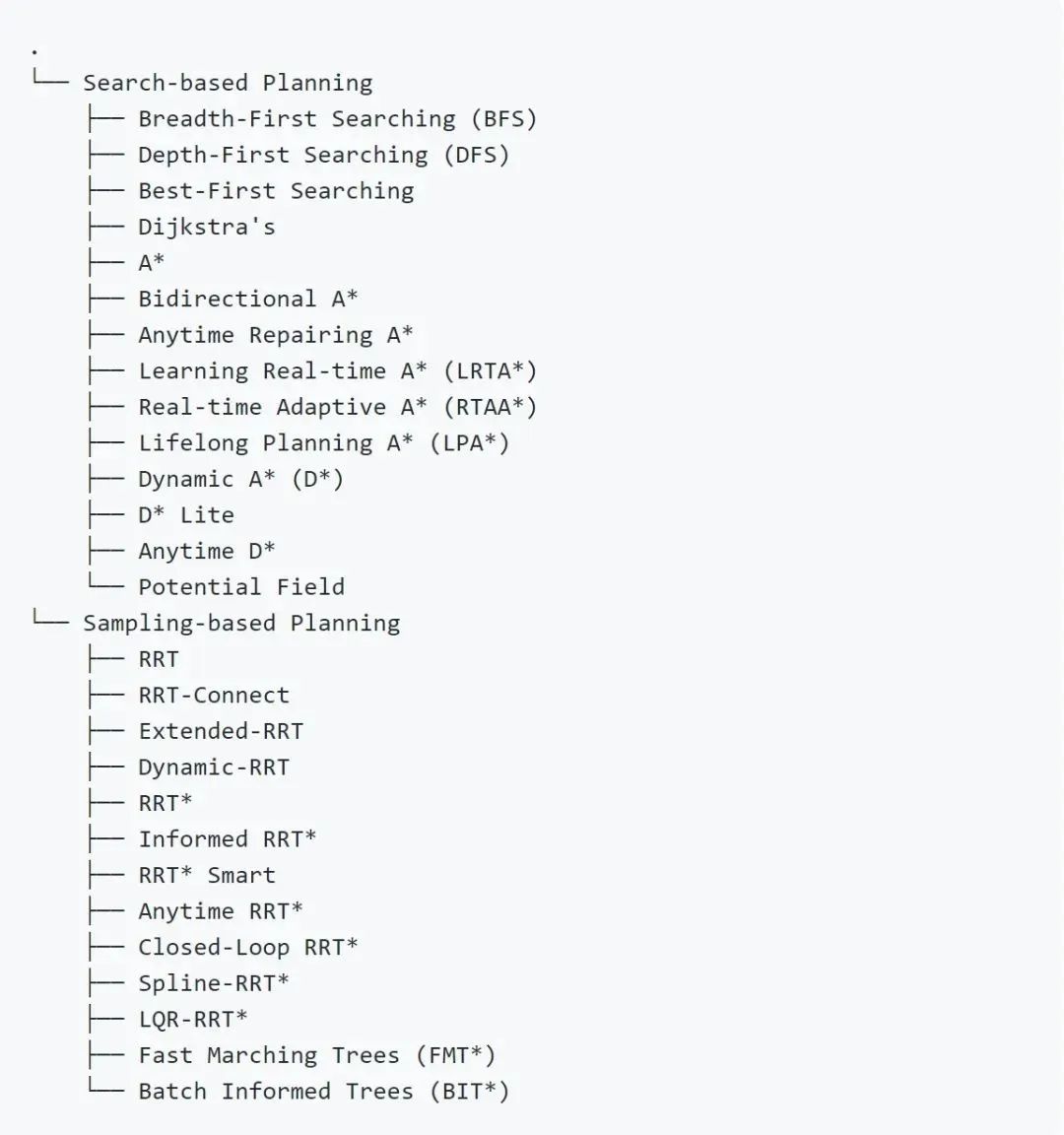
2020-08-27 14:30:0022 走機器的路,讓你看一下。 在機器人研究領域,給定某一特定任務之后,如何規劃機器人的運動方式至關重要。 最近,GitHub 上開源了一個存儲庫,該庫實現了機器人技術中常用的一些路徑規劃算法,大部分代碼
2020-11-12 18:27:242742 最近,GitHub 上開源了一個存儲庫,該庫實現了機器人技術中常用的一些路徑規劃算法,大部分代碼是用 Python 實現的。值得一提的是,開發者用 plotting 為每種算法演示了動畫運行過程,直觀清晰。
2020-12-14 13:39:412155 
近年來,移動機器人的研究受到了人們的高度重視,人們對于機器人的要求不再局限于簡單的移動,而是希望機器人能夠根據周圍環境變化采取對應措施,做到自主移動的能力。因此,路徑規劃作為移動機器人的一個重要因素就顯得尤為重要
2020-12-26 09:28:411379 路徑規劃是移動機器人導航最基本的環節,指的是機器人在有障礙物的工作環境中,如何找到一條從起點到終點適當的運動路徑,使機器人在運動過程中能安全、無碰撞地繞過所有障礙物。
2020-12-26 10:49:256216 最近,GitHub 上開源了一個存儲庫,該庫實現了機器人技術中常用的一些路徑規劃算法,大部分代碼是用 Python 實現的。值得一提的是,開發者用 plotting 為每種算法演示了動畫運行過程,直觀清晰。
2020-12-28 14:25:488137 
路徑規劃算法是自主水下航行器(AUV)完成水下自主巡航的核心算法之一。分別綜述了基于環境建模和路徑搜索兩類AUⅣ路徑規劃算法。闡述了柵格法、可視圖法和維諾圖法等環境建模方法的囯內外硏究現狀,并指出
2021-04-09 16:01:078 農業機器人的路徑規劃問題,首先針對基本煙花的交互機制和選擇策略做出改進,提出爆炸與遷移相結合的策略以及密度峰值火花、探測火花概念,提升煙花算法尋找最優解的能力,然后把改進煙花算法得到的最短路徑作換算成蟻群算法中的信息素加強值,從而避免蟻群盲目搜索,最后采用B樣條插值方法進
2021-04-16 13:55:423 自動駕駛汽車從A點行駛到B點,需要軌跡規劃算法來進行全局規劃,而具體都有哪些算法呢?這篇文章想和大家分享一下一類最常用的軌跡規劃算法,基于圖搜索的規劃算法。 在開始介紹圖搜索算法之前,先簡單介紹一下
2021-04-25 18:02:374224 
為解決非結構化復雜場景下基于搜索的尋路算法中存在的計算時間長、路徑非最優等問題,在跳點搜索( Jump pointsearch,JPS)算法的基礎上,提岀一種帶權重的跳點搜索( weighted
2021-05-06 16:29:2413 針對復雜環境下移動機器人自主導航易被困、路徑規劃不理想等問題。首先,通過改進機器人操作系統(robo‘φperating syste,ROS)中代價地圖代價值衰減函數和七宮格檢測法,研究了代價地圖
2021-06-01 11:08:086 整理和分類,按照結果最優性的不同,多智能體路徑規劃算法被分為最優算法和近似算法2類。最優的多智能體路徑規劃算法主要分為基于A*搜索、基于代價增長樹、基于沖突搜索和基于規約的4種算法。近似的多智能體路徑規劃算法主要
2021-06-04 11:56:434 基于元胞遺傳算法的機器人路徑規劃技術
2021-06-29 16:12:114 嵌入式GIS中最優路徑規劃算法研究與實現(嵌入式開發項目經理)-嵌入式GIS中最優路徑規劃算法研究與實現 ? ? ? ? ? ? ? ? ? ?
2021-07-30 12:49:524 A星路徑規劃算法完整代碼資料匯總
2021-12-03 17:16:5511 機器人對未知環境的自主探索是機器人智能化的關鍵技術。為了提高搜索效率,作者提出了一種基于邊界點優化和多步路徑規劃的搜索策略。他們主要對邊界點優化、邊界點選擇、路徑規劃三個方面對路徑規劃算法進行改進
2023-06-19 10:19:152498 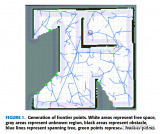
如何規劃機器人的運動方式是機器人開發領域的一大課題,本文分享GitHub的一個機器人技術中常用的路徑規劃算法的開源庫,并用動圖直觀演示運行過程。其中大部分代碼由Python實現。
2023-10-21 09:36:242307 
路徑規劃算法主要可分成兩種,一種是基于搜索結果的規劃,另一類便是本文中將要提及的基于采樣的規劃。 一般而言,基于搜索的規劃(如Astar)通常是運行在柵格地圖上的。當柵格的分辨率越大時,算法搜索
2023-11-16 15:45:031141 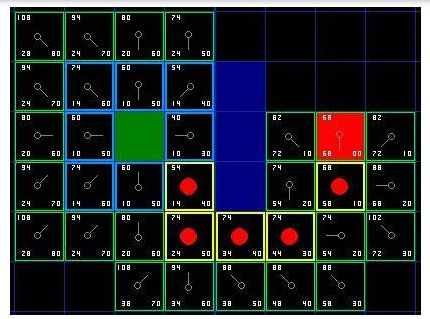
實例講解 以下將通過一個簡單的實例講解CBS的基本過程,實例如圖2所示。 圖2 初始和目標狀態 CBS的搜索過程如圖3所示。 圖3 CBS搜索過程 CBS開始時沒有沖突約束,每個機器人按照各自的路徑
2023-11-17 16:44:101682 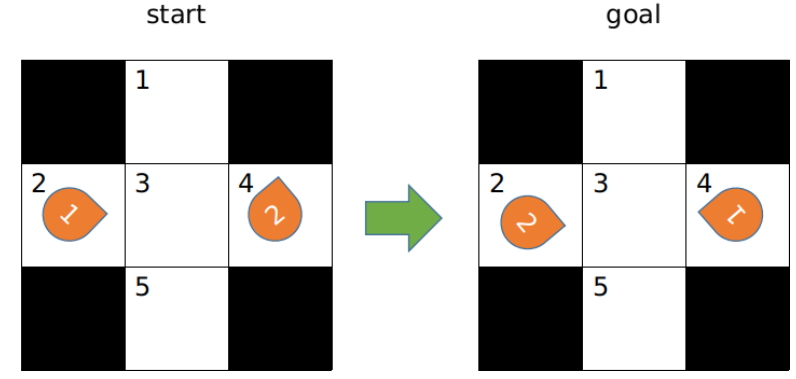
通往目的地的安全和無碰撞的路徑。 路徑規劃問題可以分為兩個方面: (一)全局路徑規劃:全局路徑規劃算法屬于靜態規劃算法,根據已有的地圖信息(SLAM)為基礎進行路徑規劃,尋找一條從起點到目標點的最優路徑。 通常全局路徑
2023-11-24 15:57:312016 在工業4.0與智能制造深度融合的今天,傳統路徑規劃算法已難以滿足動態生產環境的需求。面對復雜場景下的高精度避障、實時決策與多任務協同挑戰,具身智能工業機器人路徑規劃算法成為破局關鍵。作為具身智能領域
2025-03-28 15:01:53850 并非一成不變時,動態路徑規劃能力就顯得至關重要。本文將深入探討幾種主流的動態路徑規劃算法(如A、Dijkstra、RRT等),并解析它們如何在AGV行業中大顯身手。 為何需要動態路徑規劃? 1.簡介 傳統的靜態路徑規劃假設環境是完全已知的
2025-06-17 15:54:401358 
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論