") 機(jī)器人技術(shù)中常用的一些路徑規(guī)劃算法
機(jī)器人技術(shù)中常用的一些路徑規(guī)劃算法

導(dǎo)讀
本文分享了在GitHub開源的一個(gè)存儲庫,包含了機(jī)器人技術(shù)中常用的一些路徑規(guī)劃算法,大部分代碼由Python實(shí)現(xiàn),每種算法都配有相關(guān)動畫的運(yùn)行過程。
在機(jī)器人研究領(lǐng)域,給定某一特定任務(wù)之后,如何規(guī)劃機(jī)器人的運(yùn)動方式至關(guān)重要。
最近,GitHub 上開源了一個(gè)存儲庫,該庫實(shí)現(xiàn)了機(jī)器人技術(shù)中常用的一些路徑規(guī)劃算法,大部分代碼是用 Python 實(shí)現(xiàn)的。值得一提的是,開發(fā)者用 plotting 為每種算法演示了動畫運(yùn)行過程,直觀清晰。
項(xiàng)目地址:
https://github.com/zhm-real/PathPlanning
該開源庫中實(shí)現(xiàn)的路徑規(guī)劃算法包括基于搜索和基于采樣的規(guī)劃算法,具體目錄如下圖所示:
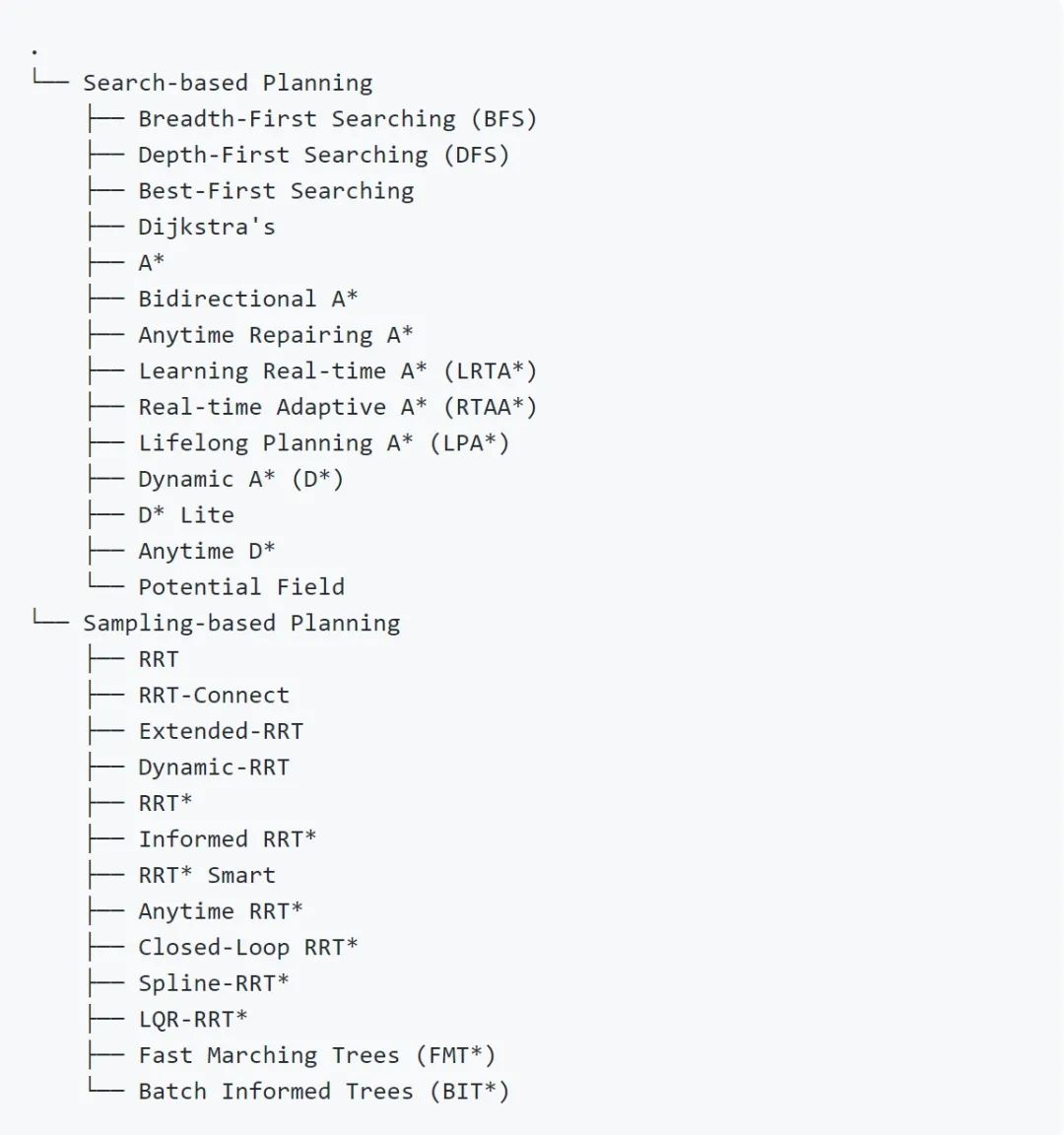
基于搜索的路徑規(guī)劃算法
基于搜索的路徑規(guī)劃算法已經(jīng)較為成熟且得到了廣泛應(yīng)用,常常被用于游戲中人物和移動機(jī)器人的路徑規(guī)劃。
最佳路徑優(yōu)先搜索算法
Dijkstra 算法
A * 搜索算法
雙向 A * 搜索算法
重復(fù) A * 搜索算法
Anytime Repairing A* (ARA*) 搜索算法
實(shí)時(shí)學(xué)習(xí) A * 搜索(LRTA*)算法
實(shí)時(shí)適應(yīng)性 A * 搜索(RTAA*)算法
動態(tài) A * 搜索(D*)算法

終身規(guī)劃 A * 搜索算法
Anytime D * 搜索算法:變動較小
Anytime D * 搜索算法:變動較大
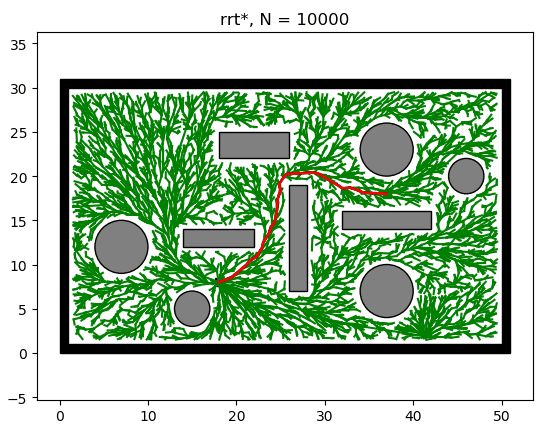
基于采樣的路徑規(guī)劃算法
與基于搜索不同,基于采樣的路徑規(guī)劃算法不需要顯式構(gòu)建整個(gè)配置空間和邊界,并且在高維度的規(guī)劃問題中得到廣泛應(yīng)用。
快速隨機(jī)搜索樹(RRT)算法
目標(biāo)偏好 RRT 算法
雙向快速擴(kuò)展隨機(jī)樹(RRT_CONNECT)算法
Extended_RRT 算法
動態(tài) RRT 算法
N = 10000 時(shí),rrt * 算法
N = 1000 時(shí),rrt*-Smart 算法
快速行進(jìn)樹(FMT*)算法
N =1000 時(shí),Informed rrt * 算法
Batch Informed 樹(BIT*)算法
責(zé)任編輯:lq
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222227 -
算法
+關(guān)注
關(guān)注
23文章
4784瀏覽量
98047 -
GitHub
+關(guān)注
關(guān)注
3文章
488瀏覽量
18667
原文標(biāo)題:機(jī)器人是如何規(guī)劃路徑的?動畫演示一下吧
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
機(jī)器人拆碼垛中高精度放置與垛型構(gòu)建的解析分析:技術(shù)路徑與核心要素
爬壁機(jī)器人磁鐵的一些常見問題

高精度機(jī)器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運(yùn)動控制方案
RK3576機(jī)器人核心:三屏異顯+八路攝像頭,重塑機(jī)器人交互與感知
自制巡線解迷宮機(jī)器人(上)
三坐標(biāo)測量機(jī)路徑規(guī)劃與補(bǔ)償技術(shù):核心算法解析
工業(yè)機(jī)器人的特點(diǎn)
AGV小車中的動態(tài)路徑規(guī)劃算法揭秘

盤點(diǎn)#機(jī)器人開發(fā)平臺
詳細(xì)介紹機(jī)場智能指路機(jī)器人的工作原理
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】視覺實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門的引路書
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品
具身智能工業(yè)機(jī)器人路徑規(guī)劃算法成為破局關(guān)鍵
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗(yàn)
- 設(shè)計(jì)大賽
- 電子發(fā)燒友
- 關(guān)于我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 張迎輝:mikezhang@elecfans.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察

版權(quán)所有 ? 長沙勒克斯教育咨詢有限公司
湖南省長沙市開福區(qū)月湖街道匍園路20號聚恒科技園1棟2301-1房
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023036445號-105-1
工商網(wǎng)監(jiān)
湘ICP備2023036445號-105-1
評論