文中介紹一種基于電磁傳感器路徑識別的智能車控制系統,系統采用Freescale16位單片機MC9S12XS128為核心控制器,利用4個電磁傳感器構成的傳感器陣列采集路面信息,單片機獲得傳感器采集
2013-03-29 17:23:29 10045
10045 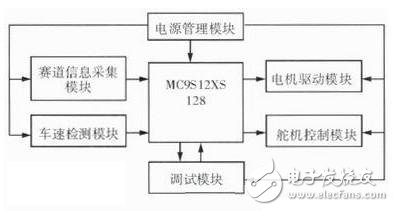
云拓將MC9S12超詳細中文資料整理后共享給廣大智能車愛好者。需要的請留下郵箱,文件比較大。
2014-02-22 18:09:04
MC9S12DG128 - 16-Bit Microcontroller - Motorola, Inc
2022-11-04 17:22:44
MC9S12DG128 - Device User Guide - Freescale Semiconductor, Inc
2022-11-04 17:22:44
我在調試MC9S12DG128的ECT模塊的時候,使用到了定時器通道0和1的中斷,為什么當我使用TSCR2_PR寄存器進行分頻時,程序就執行不下去,而不調用這句話的時候程序就能夠執行呢??求大神指點
2014-08-18 16:01:57
概述:MC9S12DG128是飛思卡爾半導體公司生產的一款微處理器芯片。它為112腳LQFP工藝封裝。
2021-05-19 06:25:58
MC9S12DG128的一些基礎資料
2014-08-19 20:00:14
請教大俠給個MC9S12XET128MAA編程軟件,和仿真調試軟件。有大俠做BMS的嗎?LTC6803G-3跟MC9S12XET128MAA讀取鋰電池電壓怎么讀取?大俠們能否告知1.2 小弟郵箱727986987@qq.com
2017-03-21 22:20:57
MC9S12XS128 芯片資料
2013-03-25 10:03:11
本文對邀請賽選用的主控芯片MC9S12DG128單片機的一些外圍接口模塊作了介紹,包括功能上的描述和例程及初始化的過程,對一些參賽隊伍中遇到的Flash鎖死問題也提供了解決的方案。
2011-03-08 11:51:48
智能車創意組識別圖an用openmv 還是用 opencv 比較好
2023-10-24 06:24:31
33886的DNC口的輸出電壓,調節電機轉速的快慢,并且在IN2口輸入電壓以調節電機的反轉和制動功能。3.1.3 主控板設計智能車控制系統主控電路圖3.3:圖3.3 MC9S12DG128主控板電路圖
2013-05-07 23:40:08
1、智能車目標識別系統的實現 首先,簡單介紹一下上面提到的各個話題的范圍 (Domain),人工智能 (Artifitial Intelligence)是最大的話題,如果用一張圖來說明的話
2022-09-06 14:54:26
智能車設計基礎 第10章.rar http://filemarkets.com/file/bai2471/9d9e6c95/智能車設計基礎 第3章.rar: http://www.t00y.com
2012-10-21 21:11:12
(MC9S12DG128)負責控制發射脈沖,經過中間的達林頓管(ULN2003A)放大脈沖信號,以此驅動左側的步進馬達(24BYJ48),帶動裝著魚食的小盒轉動,轉到一定角度魚食就會掉進魚缸了。而轉動的角度也
2012-03-05 11:36:45
詳細的MC9S12XS128原理圖原理圖,PDF文本格式,利用PDF編輯器可以編輯。。。
2013-04-02 10:48:37
本文是根據第三屆全國大學生“飛思卡爾”杯智能汽車大賽要求設計自主識別道路的智能車。整個系統采用了組委會提供的16位單片機mc9s12dg128為核心,模型車本身帶有差速器和后輪驅動,需要設計完成基于單片機的自動控制系統使得模型車在封閉的跑道上自主循線運行。
2020-08-05 06:28:21
MC9S12DG128B是一款使用16位HCS12內核單片機,它隸屬于飛思卡爾單片機的S12系列,其內核為CPU12高速處理器。MC9S12DG128B擁有豐富的片內資源,具有128 KBFlash
2021-04-14 06:53:29
單片機控制的只能尋跡車系統。該系統以MC9S12DG128為控制核心,采用CCD圖像傳感器檢測路面信息,利用加速度傳感器檢測加速度,采用紅外傳感器檢測速度,采用PID算法控制智能車直流驅動電機和模糊
2009-10-27 12:58:44
描述: 我們設計的智能尋徑小車主要由路徑檢測、轉向控制、電機驅動、車速檢測和電擁管理等 功能模塊以及軟件控制算法組成。小車以飛思卡爾公司的16位單片機MC9S12DG128B 為 核心控制器
2018-11-06 16:18:13
智能車進階版文章目錄基于STC8A8K64S4A12智能車設計一、板載外設二、功能三、實物:四、代碼五、PCB和元件六、焊接基于STC8A8K64S4A12智能車設計一、板載外設1.1 紅外接收頭
2022-02-16 06:43:41
求各位大神分享資料軟件實現智能車的控制系統飛思卡爾
2015-04-26 23:15:19
引言 本文主要設計的是一輛自主識別道路的智能車。整個系統采用了16位單片機mc9s12dg128,模型車本身帶有差速器和后輪驅動,需要設計完成基于單片機的自動控制系統使得模型車在封閉的跑道
2018-11-05 15:50:57
。 4 結語 本文設計了一個智能車控制系統,實現了快速自動尋跡功能。在硬件上,該系統采用MC9S12DG128B單片機為控制核心,協調電源模塊、路徑識別模塊、車速檢測模塊、舵機控制模塊及直流驅動電機
2018-11-06 15:08:45
`電子綜合設計時做的,車模是飛思卡爾智能車比賽用的車模,主控芯片是MC9S12XS128,語音處理芯片是SPCE061A。各種混搭,附加功能包括超聲波測距和壁障以及魔術手。只傳了源碼,小車的照片沒找到,以后有機會補上`
2012-09-09 12:48:41
基于聲音識別的智能車載監控系統設計,求大神救救我這個即將畢業的小女漢紙{:4:}
2017-05-10 11:34:36
檢測,提出了一種基于激光強反射原理的實現方案,實現了高精度的路徑檢測效果。該系統利用MC9S 12XS128控制器,對紅外接收傳感器采集到的道路黑色引導線的信息與測速模塊反饋的車速信息進行分析并處
2019-07-23 08:22:08
針對“飛思卡爾”杯全國大學生智能車邀請賽,本文開發了基于LabVIEW虛擬儀器技術的Plastid仿真系統,該系統可針對不同的賽車、賽道、路徑識別方案、控制策略等內容,進行相關分析,大大提高智能車開發效率。
2011-03-07 10:32:44
單片機系統的擴展5.3 Freescale HCS12單片機5.3.1 Freescale HCS12單片機系列簡介5.3.2 MC9S12DG128最小系統設計思考題第6章 智能汽車設計實踐
2012-08-04 14:01:34
智能車系統是由哪些模塊組成的?如何利用MCU核心板去實現智能車系統設計?
2021-10-26 08:06:54
實現了μC/OS-II操作系統在MC9S12DG128上的移植。通過μC/OS-II在MC9S12DG128上的移植,可以掌握移植和測試μC/OS-II的實質內容,同時也很容易將其移植到其它的CPU平臺上。
2011-03-08 13:44:14
本文介紹了一種智能車控制系統的設計與實現方法。通過大量實驗測試證明,該智能車能快速平穩地在制作的賽道上跟蹤黑色引導線并行駛,而且尋跡效果良好,控制響應速度快,動態性能良好,穩態誤差小,系統的穩定性和抗干擾能力強。
2021-05-18 06:46:48
智能車競賽背景全國大學生智能車競賽是一項舉辦了十四屆的大學生自動控制類科技競賽,它要求指定的車模能夠在規定的賽道上實現路徑識別、自主尋跡,并快速行駛。麻雀雖小,五臟俱全,雖然競賽智能車沒有現實生活中
2021-07-29 06:00:40
本文開發了一種基于光電傳感和路徑記憶的智能車導航系統。
2021-05-12 07:04:03
現在在學習飛思卡爾單片機。想找一個MC9S12DG128通過繼電器的開合來控制電磁閥的程序。求各位大神們幫忙。
2014-11-19 11:18:23
求一套智能車設計,本人想要做智能車方面的,借鑒一下。
2015-11-10 00:37:42
本帖最后由 eehome 于 2013-1-5 10:02 編輯
學習單片機后,不妨嘗試參加飛思卡爾智能車比賽,體驗下單片機的神奇魅力,飛思卡爾公司一款很強大的16位MC9SXS128單片機的入門介紹和詳細資料!
2012-08-14 20:58:09
The Device User Guide provides information about the MC9S12DT128 device made up of standardHCS12
2008-10-08 14:52:52 17
17 The MC9S12DT128 microcontroller unit (MCU) is a 16-bit device composed of standard
2008-10-08 14:54:3723 The MC9S12DT128 microcontroller unit (MCU) is a 16-bit device composed of standard
2008-10-09 10:25:0999 E, MC9S12DG128, MC9S12DJ128,MC9S12DB128, MC9S12A128, SC515846, SC515847,SC515848, SC515849, SC101161DT, SC101161
2010-03-03 15:47:0535 本文詳細介紹了我們為首屆全國智能車大賽而準備的智能車系統方案。該系統以Freescale16 位單片機MC9S12DG128 作為系統控制處理器,采用基于的攝像頭的圖像采樣模塊獲取賽道圖
2010-07-02 15:11:4228 介紹了一種基于光電管路徑識別的智能車系統。該智能車使用光電管作為路徑識別裝置,依靠舵機輔助智能車轉向,使用直流電機驅動智能車前進。系統采用符合PI控制算法的控制器
2010-07-06 16:57:1473 MC9S12DG128教學實驗系統:支持GPIO通用輸入輸出口及IRQ中斷、SCI、A/D、TIMER、SPI、I2C、PWM等實驗,對于這些實驗有配套教材和實驗指示書
2010-07-07 10:27:060 產品簡介:MC9S12XS128教學實驗系統:支持GPIO通用輸入輸出口及IRQ中斷、SCI、A/D、TIMER、SPI、I2C、PWM等實驗,對于這些實驗有配套教材和實驗指示書。
2010-07-07 10:30:580 摘要:設計了一種基于飛思卡爾MC9S12DG128單片機控制的智能尋跡車系統。該系統以MC9S12DG128為控制核心,采用CCD圖像傳感器檢測路面信息,利用加速度傳感器檢測加速度,紅外傳感器
2010-07-22 21:26:35115 MC9S12XS128-LQFP112最小系統設計
電路圖
2010-10-28 17:21:42257 以“飛思卡爾”杯智能車大賽為研究背景,采用MC9S12XS128作為核心處理器,通過對比各個模塊不同設計方案的性能,完成智能車電源、驅動、圖像采集、測速等模塊的設計與實現。通
2010-12-31 17:36:16397 圖像采集與處理在智能車系統中的應用
智能小車系統主要由路徑識別、速度采集、轉向控制及車速控制等功能模塊組成。路徑識別功能采用CMOS攝像
2009-11-23 21:09:092049 
S12單片機模塊應用及程序下載調試
本次智能車邀請賽采用的MC9S12DG128(以下簡稱DG128)是Freescale公司推出的S12系列單片機中的一款增強型16位單片機,片
2009-11-23 21:13:353011 基于16位單片機MC9S12DG128的智能車控制系統設計與實現
1引言 我國自2006年起舉辦的全國大學生“飛思卡爾杯”智能汽車競賽融科學性、趣味
2009-12-04 10:35:512244 圖像采集與處理在智能車系統中的應用
系統概述
智能小車系統主要由路徑識別、速度采集、轉向控制及車速控制等功能模塊組成。路徑識別功能采用CMOS攝
2009-12-10 10:51:29841 
MC9S12XSl28微控制器的智能車硬件設計
以“飛思卡爾”杯智能車大賽為研究背景,采用MC9S12XSl28作為核心處理器,通過對比各個模塊不同設計方案的性能,完成智能車電
2010-04-12 15:28:212415 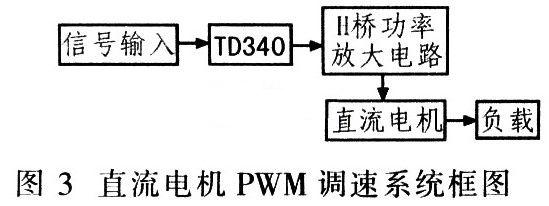
介紹了基于MC9S12XS128單片機控制的智能車系統,該系統以CCD攝像頭傳感器作為路徑識別裝置,通過圖像識別提取道路黑線信息,計算出反應道路形狀的舵機控制量,對舵機進行控制。對智
2011-02-12 15:31:05156 為某車型設計了一款車身中央控制器BCM,實現了門鎖控制、燈光控制、雨刷控制、車窗控制、LIN通信、RKE通信等功能。BCM采用Freescale的S12系列16位微處理器MC9S12XS128進行設計,通過多路開關檢測芯片MC33993進行IO擴展,解決了多路開關、處理器IO管腳有限條
2011-03-07 15:37:33271 介紹了一種基于光電管路徑識別的智能車系統。該智能車使用光電管作為路徑識別裝置,依靠舵機輔助智能車轉向,使用直流電機驅動智能車前進。系統采用符合PI控制算法的控制器進行
2011-06-09 09:56:413372 
本文介紹了一種基于紅外反射式光電傳感器路徑識別的智能車控制系統。單片機獲得傳感器采集的路面信息和車速信息,經過分析后控制 智能車 的舵機轉向,同時對直流電機進行調速
2011-07-06 17:16:51164 本文闡述了基于CMOS 圖像傳感器,以微處理器MC9S12DG128為核心的智能車 圖像采集 系統。通過閾值分割與均值濾波提取了賽道信息,最后進行了路徑的識別與簡化。該圖像采集系統具有使
2011-07-06 18:13:28189 本文設計了基于MC9S12XS128(飛思卡爾指定芯片)的單片機開發系統,為即將參加此項競賽的同學提供學習平臺。實際應用結果表明,此項開發板的應用大大提高了大學生制作智能車的開發效
2011-08-17 11:57:1115761 
以MC9S12DT128B微控制器為核心的電池數據采集系統, 實時檢測電池的相關信息, 并將數據發送至上位機, 為電池狀態估算提供依據。
2011-08-17 15:54:331704 
本文簡要介紹了飛思卡爾杯全國大學生智能車競賽的規則,敘述了能夠實現路線識別功能的傳感器攝像頭的識別原理,著重論述了用飛思卡爾DG128 單片機借助攝像頭識別路線時的數據處
2011-11-02 11:33:53233 本文主要設計的是一輛自主識別道路的智能車。整個系統采用了16位單片機mc9s12dg128,模型車本身帶有差速器和后輪驅動,需要設計完成基于單片機的自動控制系統使得模型車在封閉的跑
2012-08-07 11:33:335963 
路徑識別系統是智能車的眼睛,是智能車獲取環境信息,實現自動控制的基礎。針對路徑識別系統高精度、高速度的要求,分別設計了智能車光電傳感器路徑識別系統和攝像頭傳感器路
2012-09-12 16:51:220 高精度、高速度、大前瞻的路徑采集系統能為智能車提高更精準、更及時和更豐富的賽道信息,是智能車獲取更大速度的關鍵。針對激光傳感器的路徑采集模塊,設計了一種路徑識別算
2012-10-10 15:04:2348 MC9S12DG128中文資料詳細的ppt。
2012-12-24 13:59:2583 文中設計了一種基于MC9S12單片機的智能車數據遠程傳輸系統。該系統以Nordic公司生產的2.4GHz頻段射頻芯片NRF24L01作為數據無線收發芯片,以Freescale單片機MC9S12為控制單元,采用交互式主
2013-06-08 17:43:3093 為了實現智能小車自主尋跡的功能,設計了一種電磁導航式智能車控制系統。 以飛思卡爾 16 位單片機 MC9S128 為核心控 制單元,重點闡述了路徑信息采集和直流驅動電機的模塊設計,確立了傳感器的排布
2015-11-02 17:47:003 HF-ExBoard實驗系統(For S12XS128)實驗指導書。xs128多用于智能車控制
2015-11-23 15:49:324 MC9S12XS128MAA_最小系統原理圖。
2015-12-17 11:29:48105 MC9S12XS128_中文資料本文檔將XS128英文轉為中文,準確,全面。
2016-05-06 16:43:39101 基于FPGA的智能車路徑圖像識別的預處理設計
2016-09-22 12:41:1523 基于MC9S12XS128單片機的智能小車控制系統設計與實現_魯小雨
2017-01-19 21:54:1513 基于MC9S12XS128的智能小車超車控制系統_孫繼元
2017-03-18 09:14:5111 智能汽車又叫輪式移動機器人,是一種集環境感知、規劃決策、自動行駛等功能于一體的綜合系統,集中地運用到自動控制、模式識別、傳感器技術、汽車電子、電氣、計算機、機械等多個學科,是典型的高新技術綜合體。具有重要的軍用及民用價值。
2017-09-06 15:23:0020 為了能夠自主尋跡行駛,智能車應具有路徑識別、方向控制、速度檢測、驅動控制等功能,根據比賽規定,本設計以飛思卡爾公司提供的比賽專用車模為載體,以飛思卡爾16位微控制器MC9S12XS128單片機作為
2017-09-07 15:04:295 本文所述的智能車就是根據比賽規則要求設計并制作而成的,該智能車控制系統采用飛思卡爾半導體公司生產的16位MC9S12DG128單片機作為數字控制器,由安裝在車前部的黑白CMOS攝像頭負責采集賽道信息
2017-09-07 15:58:158 MC9S12XS128是一款針對汽車電子市場的高性能16位單片機,具有速度快、功能強、成本低、功耗低等特點。
2017-09-19 11:04:1630 CCD傳感器識別道路中央黑色的引導線,利用傳感器檢測智能車的加速度和速度,在此基礎上利用合理的算法控制智能車運動,從而實現快速穩定的尋跡行駛。 2 硬件系統設計 該系統硬件設計主要由MC9S12DGl28控制核心、電源管理模塊、直流電機驅動模塊、轉
2017-11-03 11:23:496 引言 本文是根據第三屆全國大學生飛思卡爾杯智能汽車大賽要求設計自主識別道路的智能車。整個系統采用了組委會提供的16位單片機mc9s12dg128為核心,模型車本身帶有差速器和后輪驅動,需要設計完成
2017-11-22 15:41:311 CCD傳感器識別道路中央黑色的引導線,利用傳感器檢測智能車的加速度和速度,在此基礎上利用合理的算法控制智能車運動,從而實現快速穩定的尋跡行駛。 2 硬件系統設計 該系統硬件設計主要由MC9S12DGl28控制核心、電源管理模塊、直流電機驅動模塊、轉向
2017-11-24 15:01:005 引言 隨著控制技術及計算機技術的發展,智能車系統將在未來工業生產和日常生活中扮演重要的角色。本文所述智能車尋跡系統采用紅外反射式光電管識別路徑上的黑線,并以最短的時間完成尋跡。通過加長轉臂的舵機驅動
2017-11-30 10:45:011 引言 隨著控制技術及計算機技術的發展,智能車系統將在未來工業生產和日常生活中扮演重要的角色。本文所述智能車尋跡系統采用紅外反射式光電管識別路徑上的黑線,并以最短的時間完成尋跡。通過加長轉臂的舵機驅動
2017-12-05 11:26:271 研究一種具有路徑記憶功能的智能車控制系統。該智能車使用紅外光電傳感器實現路徑識別,依靠電機驅動前進,使用舵機幫助智能車轉向。該系統采用路徑記憶算法對智能車進行控制,將記憶下的賽道信息作為主要控制信息,通過提前判斷彎道的曲率大小,從而得到一個最佳過彎速度,使其運行更平穩、快速。
2018-12-07 17:20:4816 MC9S12XS128 (以下簡稱XS128)開發平臺是由“飛翔科技”基于XS128單片機的功能面開發的一款開發平臺。該開發平臺硬件資源豐富,布局清晰明了,利用該開發平臺的硬件資源可熟悉和享握XS128單片機的功能和用法。
2018-12-12 08:00:0052 本文檔的主要內容詳細介紹的是MC9S12DG12的幾個原理圖和PCB及ProtelDXP指導教程免費下載。
2019-04-23 08:00:000 本文檔的主要內容詳細介紹的是MC9S12XS128的SCI和AD轉換與PWM的例程免費下載。
2019-07-22 08:00:0020 Freescale16位單片機MC9S12DG128作為系統控制處理器,基于CCD傳感器采集視頻圖像,通過對獲得的圖像進行處理分析,獲得道路信息提取賽道黑線,并結合測速反饋實現對小車的閉環反饋控制,后輪驅動電機控制模塊采用了模糊PID控制算法,充分的利用了內
2019-11-26 15:35:181 以及車輛工程等多個學科交叉的科技創意性比賽。本文以此為背景,基于MC9S12xS128單片機設計了一種智能車系統。
2020-04-06 11:04:004230 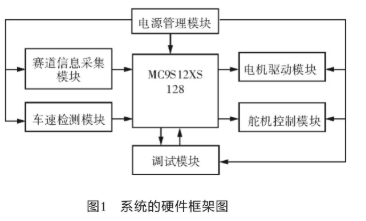
運用 Freescale S12 單片機控制模型車自動沿著黑白(電磁組是檢測賽道通有交流信號的導線來實現尋跡)賽道完成比賽。主要包括智能車的組裝、機械機構的調整、系統設計方案和程序控制策略的選定
2020-09-21 08:00:000 本文檔的主要內容詳細介紹的是MC9S12DG128的結構與工作原理的學習課件免費下載包括了:MC9S12DG128的內部結構,MC9S12DG128引腳功能,MC9S12DG128的運行模式,MC9S12DG128的存儲器組織
2020-12-28 08:00:0016 MC9S12XS128 事件處理
2021-12-05 09:06:0927 電子發燒友網站提供《基于XS128單片機的智能車賽道識別裝置的設計.pdf》資料免費下載
2023-10-11 14:57:450 電子發燒友網站提供《基于MC9S12XS128的汽車BCM的設計與實現.pdf》資料免費下載
2023-10-27 09:32:553 電子發燒友網站提供《基于MC9S12XS128單片機的多功能智能小車.pdf》資料免費下載
2023-11-07 09:12:192 簡介:以“飛思卡爾”杯智能車大賽為研究背景,采用MC9S12XS128作為核心處理器,通過對比各個模塊不同設計方案的性能,完成智能車電源、驅動、圖像采集、測速等模塊的設計與實現。通過大量的實驗調試
2023-11-09 17:31:311
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論