文中介紹一種基于電磁傳感器路徑識別的智能車控制系統(tǒng),系統(tǒng)采用Freescale16位單片機MC9S12XS128為核心控制器,利用4個電磁傳感器構(gòu)成的傳感器陣列采集路面信息,單片機獲得傳感器采集
2013-03-29 17:23:29 10045
10045 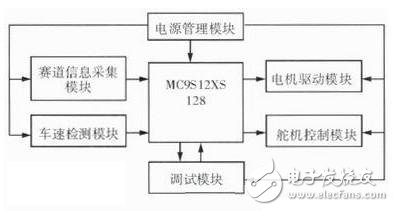
在單片機應用系統(tǒng)中,由于圖像采集速度、程序存儲器和數(shù)據(jù)存儲器的尋址空間的限制,要完整存儲30 fps、640×480像素大小的一幅圖像是相當困難的。本文運用較高性能的16位飛思卡爾單片機在超高頻
2018-11-27 08:40:006277 
MC9S12系列單片機是飛思卡爾半導體推出的基于 CPU12內(nèi)核的 16位車用MCU,本章介紹其入門知識
2021-12-10 06:36:40
MC9S12DG128 - 16-Bit Microcontroller - Motorola, Inc
2022-11-04 17:22:44
我在調(diào)試MC9S12DG128的ECT模塊的時候,使用到了定時器通道0和1的中斷,為什么當我使用TSCR2_PR寄存器進行分頻時,程序就執(zhí)行不下去,而不調(diào)用這句話的時候程序就能夠執(zhí)行呢??求大神指點
2014-08-18 16:01:57
概述:MC9S12DG128是飛思卡爾半導體公司生產(chǎn)的一款微處理器芯片。它為112腳LQFP工藝封裝。
2021-05-19 06:25:58
MC9S12DG128的一些基礎資料
2014-08-19 20:00:14
Mc9S12xs128單片機是只有一個定時器可以用么?我現(xiàn)在想同時運行兩個定時器
2016-01-07 20:33:43
本文對邀請賽選用的主控芯片MC9S12DG128單片機的一些外圍接口模塊作了介紹,包括功能上的描述和例程及初始化的過程,對一些參賽隊伍中遇到的Flash鎖死問題也提供了解決的方案。
2011-03-08 11:51:48
MC9S12DG128B是一款使用16位HCS12內(nèi)核單片機,它隸屬于飛思卡爾單片機的S12系列,其內(nèi)核為CPU12高速處理器。MC9S12DG128B擁有豐富的片內(nèi)資源,具有128 KBFlash
2021-04-14 06:53:29
智能車教程單片機原理及應用(C語言版)4.ppt智能車教程制作過程單片機原理及應用 (C語言版)第4章單片機C語言及程序設計 第4章單片機C語言及程序設計 4.1C51概述 4.2C51數(shù)據(jù)類型
2021-07-14 08:34:15
車1.2系統(tǒng)總體方案的設計競賽規(guī)則規(guī)定,智能車系統(tǒng)采用飛思卡爾的16位微控制器MC9S12DG128B單片機作為核心控制單元用于智能車系統(tǒng)的控制。在選定智能車系統(tǒng)采用光電傳感器方案后,賽車的位置信號由車體
2013-05-07 23:40:08
`為了方便電子協(xié)會的大一新成員快速上手51單片機,本人設計了一款基于STC12C5A60S2單片機的多功能智能車控制板,可用于各種小車平臺。新生可利用該控制板學習51單片機并迅速掌握多種常用外設
2013-11-04 15:55:23
STM32單片機在智能車中有何作用?PWM和GPIO是如何控制機器人的輪胎旋轉(zhuǎn)速度和方向的?
2022-02-11 07:56:46
(MC9S12DG128)負責控制發(fā)射脈沖,經(jīng)過中間的達林頓管(ULN2003A)放大脈沖信號,以此驅(qū)動左側(cè)的步進馬達(24BYJ48),帶動裝著魚食的小盒轉(zhuǎn)動,轉(zhuǎn)到一定角度魚食就會掉進魚缸了。而轉(zhuǎn)動的角度也
2012-03-05 11:36:45
目錄第4篇實戰(zhàn)案例篇第16章 智能車控制系統(tǒng) 該書叫什么名字
2015-04-25 15:15:52
本文是根據(jù)第三屆全國大學生“飛思卡爾”杯智能汽車大賽要求設計自主識別道路的智能車。整個系統(tǒng)采用了組委會提供的16位單片機mc9s12dg128為核心,模型車本身帶有差速器和后輪驅(qū)動,需要設計完成基于單片機的自動控制系統(tǒng)使得模型車在封閉的跑道上自主循線運行。
2020-08-05 06:28:21
單片機控制的只能尋跡車系統(tǒng)。該系統(tǒng)以MC9S12DG128為控制核心,采用CCD圖像傳感器檢測路面信息,利用加速度傳感器檢測加速度,采用紅外傳感器檢測速度,采用PID算法控制智能車直流驅(qū)動電機和模糊
2009-10-27 12:58:44
組、直立電磁組、雙車接力組、聲音信標組;創(chuàng)意1組:AI電磁組。此外,由于今年比賽引入了更多的單片機和贊助商,因此在單片機使用上和往年有著較大的區(qū)別。1.基礎四輪組四輪組從競賽舉...
2021-09-02 06:29:54
哪位大神有基于單片機的公交車報站控制系統(tǒng)的設計資料啊?求幫助?急!!!
2013-11-21 23:00:29
描述: 我們設計的智能尋徑小車主要由路徑檢測、轉(zhuǎn)向控制、電機驅(qū)動、車速檢測和電擁管理等 功能模塊以及軟件控制算法組成。小車以飛思卡爾公司的16位單片機MC9S12DG128B 為 核心控制
2018-11-06 16:18:13
基于HOLTEK單片機的智能車
2014-05-17 17:37:23
基于K128單片機的紅外對管飛思卡爾智能車(5個對管)軟件部分包括:出庫直行模塊大,小彎道環(huán)島s彎停車#include "headfile.h"#include "
2022-03-02 07:42:17
智能車進階版文章目錄基于STC8A8K64S4A12智能車設計一、板載外設二、功能三、實物:四、代碼五、PCB和元件六、焊接基于STC8A8K64S4A12智能車設計一、板載外設1.1 紅外接收頭
2022-02-16 06:43:41
求各位大神分享資料軟件實現(xiàn)智能車的控制系統(tǒng)飛思卡爾
2015-04-26 23:15:19
引言 本文主要設計的是一輛自主識別道路的智能車。整個系統(tǒng)采用了16位單片機mc9s12dg128,模型車本身帶有差速器和后輪驅(qū)動,需要設計完成基于單片機的自動控制系統(tǒng)使得模型車在封閉的跑道
2018-11-05 15:50:57
。 1.5 舵機控制模塊 本系統(tǒng)使用SANWASRM102型舵機完成智能車轉(zhuǎn)向。舵機屬于位置伺服電機,控制信號是MC9S12DG128單片機產(chǎn)生的PWM信號。舵機自身硬件特性決定:在給定電壓一定
2018-11-06 15:08:45
`電子綜合設計時做的,車模是飛思卡爾智能車比賽用的車模,主控芯片是MC9S12XS128,語音處理芯片是SPCE061A。各種混搭,附加功能包括超聲波測距和壁障以及魔術手。只傳了源碼,小車的照片沒找到,以后有機會補上`
2012-09-09 12:48:41
的設計過程大為減化。本文選用飛思卡爾(Freescale)公司的16位單片機MC9S12DG128作為硬件平臺,針對MC9S12DG128的存儲器組織和體系結(jié)構(gòu),對μC/OS-II源代碼作了相應的改寫,最終
2011-03-08 13:44:14
本文介紹了一種智能車控制系統(tǒng)的設計與實現(xiàn)方法。通過大量實驗測試證明,該智能車能快速平穩(wěn)地在制作的賽道上跟蹤黑色引導線并行駛,而且尋跡效果良好,控制響應速度快,動態(tài)性能良好,穩(wěn)態(tài)誤差小,系統(tǒng)的穩(wěn)定性和抗干擾能力強。
2021-05-18 06:46:48
檢測裝置,使用卡爾曼濾波完成陀螺儀數(shù)據(jù)與加速度計數(shù)據(jù)的數(shù)據(jù)融合。系統(tǒng)選用飛思卡爾16位單片機MC9S12XS128為控制核心,完成了傳感器信號的處理,濾波算法的實現(xiàn)及車身控制,人機交互等。整個系統(tǒng)在制作完...
2021-08-23 06:32:41
基于AVR單片機的無線語音遙控智能車是由哪些部分組成的?怎樣去設計一種基于AVR單片機的無線語音遙控智能車?
2021-09-22 08:00:22
現(xiàn)在在學習飛思卡爾單片機。想找一個MC9S12DG128通過繼電器的開合來控制電磁閥的程序。求各位大神們幫忙。
2014-11-19 11:18:23
求mc9s12xs128單片機基本操作例程
2013-11-19 21:55:10
飛思卡爾MC9S12DG128 單片機接收調(diào)試助手所發(fā)的兩個浮點型數(shù)據(jù)。求大神代碼,萬分感謝, 我q1932238825,發(fā)qq郵箱也行,感謝。
2016-09-27 10:43:09
設計目標:①軟件設計基于單片機的智能車系統(tǒng);②實現(xiàn)操作界面登錄功能;③實現(xiàn)管理員操作系統(tǒng)界面功能;④實現(xiàn)用戶操作系統(tǒng)界面功能;⑤實現(xiàn)智能車控制系統(tǒng)界面功能。求各位大神指點迷津,先實現(xiàn)無線遙控模塊
2015-04-26 20:55:15
設計目標:軟件設計基于單片機的智能車系統(tǒng)(飛思卡爾)如何實現(xiàn)上位機與下位機之間的通信
2015-04-21 23:13:14
本帖最后由 eehome 于 2013-1-5 10:02 編輯
學習單片機后,不妨嘗試參加飛思卡爾智能車比賽,體驗下單片機的神奇魅力,飛思卡爾公司一款很強大的16位MC9SXS128單片機的入門介紹和詳細資料!
2012-08-14 20:58:09
The MC9S12DT128 microcontroller unit (MCU) is a 16-bit device composed of standard
2008-10-09 10:25:09 99
99 本文對邀請賽選用的主控芯片MC9S12DG128 單片機的一些外圍接口模塊作了介紹,包括功能上的描述和例程及初始化的過程,對一些參賽隊伍中遇到的Flash鎖死問題也提供了解決的方
2009-04-22 17:05:0038 MC9S12NE64 是一款帶有以太網(wǎng)物理層接口的16 位單片機,屬于MC9S12 系列,它以速度更快的CPU12 內(nèi)核(Star Core)為核心,典型的S12 總線速度為25MHz。MC9S12NE64內(nèi)部還集成了64KB FLASH,8KB R
2009-04-22 17:41:1549 介紹目前國內(nèi)應用較少的Motorola 公司16 位單片機MC9S12H256;詳細闡述使用該型號單片機實現(xiàn)閉環(huán)變頻調(diào)速系統(tǒng)的設計方案;著重討論MC9S12H256用于變頻調(diào)速時特有的優(yōu)勢。
2009-05-15 13:26:2631 E, MC9S12DG128, MC9S12DJ128,MC9S12DB128, MC9S12A128, SC515846, SC515847,SC515848, SC515849, SC101161DT, SC101161
2010-03-03 15:47:0535 本文詳細介紹了我們?yōu)槭讓萌珖?b class="flag-6" style="color: red">智能車大賽而準備的智能車系統(tǒng)方案。該系統(tǒng)以Freescale16 位單片機MC9S12DG128 作為系統(tǒng)控制處理器,采用基于的攝像頭的圖像采樣模塊獲取賽道圖
2010-07-02 15:11:4228 MC9S12DG128教學實驗系統(tǒng):支持GPIO通用輸入輸出口及IRQ中斷、SCI、A/D、TIMER、SPI、I2C、PWM等實驗,對于這些實驗有配套教材和實驗指示書
2010-07-07 10:27:060 摘要:設計了一種基于飛思卡爾MC9S12DG128單片機控制的智能尋跡車系統(tǒng)。該系統(tǒng)以MC9S12DG128為控制核心,采用CCD圖像傳感器檢測路面信息,利用加速度傳感器檢測加速度,紅外傳感器
2010-07-22 21:26:35115 這里描述的是配合本書設計的一套MC9S12XD/E系列單片機開發(fā)工具包。
開發(fā)包的主要硬件是一塊MC9S12XDP512(或MC9S12XE100)開發(fā)板,是MC9S12XD/E系列單片機的基本系統(tǒng),和一個具有U
2010-09-23 22:51:48270 以“飛思卡爾”杯智能車大賽為研究背景,采用MC9S12XS128作為核心處理器,通過對比各個模塊不同設計方案的性能,完成智能車電源、驅(qū)動、圖像采集、測速等模塊的設計與實現(xiàn)。通
2010-12-31 17:36:16397 MC9S12DG128的路徑識別的智能車系統(tǒng)設計
引言:隨著控制技術及計算機技術的發(fā)展,智能車系統(tǒng)將在未來工業(yè)生產(chǎn)和日常生活中扮演重要的角色。本文
2008-10-08 13:22:581662 MC9S12NE64型單片機的嵌入式以太網(wǎng)連接
摘要:本文分析基于單片機的以太網(wǎng)連接方案,介紹MC9S12NE64型16位單片機的特性及其最小系統(tǒng)的
2009-11-13 19:05:501622 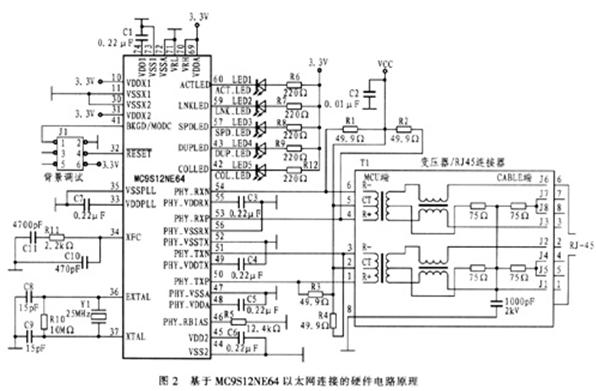
S12單片機模塊應用及程序下載調(diào)試
本次智能車邀請賽采用的MC9S12DG128(以下簡稱DG128)是Freescale公司推出的S12系列單片機中的一款增強型16位單片機,片
2009-11-23 21:13:353011 MC9S12XSl28微控制器的智能車硬件設計
以“飛思卡爾”杯智能車大賽為研究背景,采用MC9S12XSl28作為核心處理器,通過對比各個模塊不同設計方案的性能,完成智能車電
2010-04-12 15:28:212415 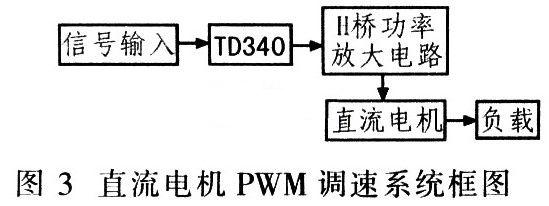
介紹了基于MC9S12XS128單片機控制的智能車系統(tǒng),該系統(tǒng)以CCD攝像頭傳感器作為路徑識別裝置,通過圖像識別提取道路黑線信息,計算出反應道路形狀的舵機控制量,對舵機進行控制。對智
2011-02-12 15:31:05156 為某車型設計了一款車身中央控制器BCM,實現(xiàn)了門鎖控制、燈光控制、雨刷控制、車窗控制、LIN通信、RKE通信等功能。BCM采用Freescale的S12系列16位微處理器MC9S12XS128進行設計,通過多路開關檢測芯片MC33993進行IO擴展,解決了多路開關、處理器IO管腳有限條
2011-03-07 15:37:33271 選擇了Frees—cale公司的MC9Sl2DGl28B作為控制器。MC9Sl2DGl28B芯片是一款16位的單片機,功能強大,性能優(yōu)越。本文采用該型號的單片機保證了所設計系統(tǒng)的穩(wěn)定可靠。
2011-03-22 18:11:212541 
提出一種使用激光檢測白底黑色跑道的 尋跡智能車 的軟硬件設計方法,在硬件上設計了最小系統(tǒng)、主板、電機驅(qū)動、激光傳感器模塊、測速模塊等電路,采用8位freescale單片機MC9S08AC1
2011-05-30 15:31:08369 本文介紹了一種基于紅外反射式光電傳感器路徑識別的智能車控制系統(tǒng)。單片機獲得傳感器采集的路面信息和車速信息,經(jīng)過分析后控制 智能車 的舵機轉(zhuǎn)向,同時對直流電機進行調(diào)速
2011-07-06 17:16:51164 本文闡述了基于CMOS 圖像傳感器,以微處理器MC9S12DG128為核心的智能車 圖像采集 系統(tǒng)。通過閾值分割與均值濾波提取了賽道信息,最后進行了路徑的識別與簡化。該圖像采集系統(tǒng)具有使
2011-07-06 18:13:28189 本文設計了基于MC9S12XS128(飛思卡爾指定芯片)的單片機開發(fā)系統(tǒng),為即將參加此項競賽的同學提供學習平臺。實際應用結(jié)果表明,此項開發(fā)板的應用大大提高了大學生制作智能車的開發(fā)效
2011-08-17 11:57:1115773 
功能描述:結(jié)合飛思卡爾16位單片機MC9S12DG128B完成小車自動尋跡,沿黑線行駛功能 * IDE環(huán)境: Metrowerks CodeWarrior 4.1 * 組成文件: * main.c * SmartCar.c/PID.c/LCD1620.c/Test.c * 說明: 本版本為智能
2011-09-19 14:17:46716 本文簡要介紹了飛思卡爾杯全國大學生智能車競賽的規(guī)則,敘述了能夠?qū)崿F(xiàn)路線識別功能的傳感器攝像頭的識別原理,著重論述了用飛思卡爾DG128 單片機借助攝像頭識別路線時的數(shù)據(jù)處
2011-11-02 11:33:53233 該系統(tǒng)以MC9S12X128單片機為控制核心,采用IR2130芯片驅(qū)動MOSFET功率管,實現(xiàn)對直流無刷電機三相六拍PWM控制。系統(tǒng)硬件電路結(jié)構(gòu)簡單、調(diào)速方便、功耗低。實際運行測試表明,電機可以長期穩(wěn)
2012-01-11 10:24:49105 本文主要設計的是一輛自主識別道路的智能車。整個系統(tǒng)采用了16位單片機mc9s12dg128,模型車本身帶有差速器和后輪驅(qū)動,需要設計完成基于單片機的自動控制系統(tǒng)使得模型車在封閉的跑
2012-08-07 11:33:335965 
MC9S12DG128中文資料詳細的ppt。
2012-12-24 13:59:2583 文中設計了一種基于MC9S12單片機的智能車數(shù)據(jù)遠程傳輸系統(tǒng)。該系統(tǒng)以Nordic公司生產(chǎn)的2.4GHz頻段射頻芯片NRF24L01作為數(shù)據(jù)無線收發(fā)芯片,以Freescale單片機MC9S12為控制單元,采用交互式主
2013-06-08 17:43:3093 為了實現(xiàn)智能小車自主尋跡的功能,設計了一種電磁導航式智能車控制系統(tǒng)。 以飛思卡爾 16 位單片機 MC9S128 為核心控 制單元,重點闡述了路徑信息采集和直流驅(qū)動電機的模塊設計,確立了傳感器的排布
2015-11-02 17:47:003 MC9S12XS單片機原理及嵌入式系統(tǒng)開發(fā)
2016-06-03 15:37:0332 MC9S12XS單片機原理及嵌入式系統(tǒng)開發(fā)的源代碼
2017-01-14 03:11:0670 基于MC9S12XS128單片機的智能小車控制系統(tǒng)設計與實現(xiàn)_魯小雨
2017-01-19 21:54:1513 基于MC9S12XS128的智能小車超車控制系統(tǒng)_孫繼元
2017-03-18 09:14:5111 MC9S12DF128是飛思卡爾公司是推出的16位高性能單片機,在汽車電子領域廣泛應用,如:寶馬、奔馳等大廠商,教育部在國內(nèi)已舉辦了五屆飛思卡爾車模大賽,參賽學校已經(jīng)超過200所,該項賽事一直選用該型號單片機。
2017-09-01 17:33:2521 為了能夠自主尋跡行駛,智能車應具有路徑識別、方向控制、速度檢測、驅(qū)動控制等功能,根據(jù)比賽規(guī)定,本設計以飛思卡爾公司提供的比賽專用車模為載體,以飛思卡爾16位微控制器MC9S12XS128單片機作為
2017-09-07 15:04:295 本文所述的智能車就是根據(jù)比賽規(guī)則要求設計并制作而成的,該智能車控制系統(tǒng)采用飛思卡爾半導體公司生產(chǎn)的16位MC9S12DG128單片機作為數(shù)字控制器,由安裝在車前部的黑白CMOS攝像頭負責采集賽道信息
2017-09-07 15:58:158 MC9S12XS128是一款針對汽車電子市場的高性能16位單片機,具有速度快、功能強、成本低、功耗低等特點。
2017-09-19 11:04:1630 1 引言 智能汽車是汽車電子、人工智能、模式識別、自動控制、計算機、機械多個學科領域的交叉綜合的體現(xiàn),具有重要的應用價值。智能尋跡車是基于飛思卡爾MC9S12DGl28單片機開發(fā)實現(xiàn)的,該系統(tǒng)采用
2017-11-03 11:23:496 引言 本文是根據(jù)第三屆全國大學生飛思卡爾杯智能汽車大賽要求設計自主識別道路的智能車。整個系統(tǒng)采用了組委會提供的16位單片機mc9s12dg128為核心,模型車本身帶有差速器和后輪驅(qū)動,需要設計完成
2017-11-22 15:41:311 1 引言 智能汽車是汽車電子、人工智能、模式識別、自動控制、計算機、機械多個學科領域的交叉綜合的體現(xiàn),具有重要的應用價值。智能尋跡車是基于飛思卡爾MC9S12DGl28單片機開發(fā)實現(xiàn)的,該系統(tǒng)采用
2017-11-24 15:01:005 以飛思卡爾16位單片機MC9S12XS128為核心控制器,以二輪玩具車為控制對象,使用ENC-03RC陀螺儀傳感器與MMA7361加速度傳感器,通過使用匹配濾波算法實現(xiàn)二輪玩具車模傾斜角度的測量。在此基礎上,將二輪玩具車直立運動線性分解,設計出直立速度控制器。實現(xiàn)了二輪車直立運行。
2018-03-20 10:58:003326 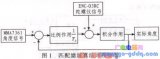
設計有效的智能車控制系統(tǒng)必須首先掌握控制對象的特性。根據(jù)對智能車特點的分析,可以認為,智能車轉(zhuǎn)向控制系統(tǒng)的傳遞函數(shù)近似為一階積分加純滯后,速度控制對象的傳遞函數(shù)則近似為一階慣性加純滯后的結(jié)論。
2019-07-30 08:10:003350 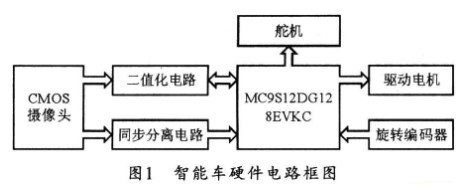
智能車競速比賽以及多種智能車的應用場合中,需要智能車沿著某條軌跡快速前進,使用普通紅外傳感器、激光傳感器、攝像頭識別均可有效提取路面軌道信息而解決這一問題,現(xiàn)在常見使用16位單片機作為控制核心。
2018-11-27 08:36:004908 MC9S12XS128 (以下簡稱XS128)開發(fā)平臺是由“飛翔科技”基于XS128單片機的功能面開發(fā)的一款開發(fā)平臺。該開發(fā)平臺硬件資源豐富,布局清晰明了,利用該開發(fā)平臺的硬件資源可熟悉和享握XS128單片機的功能和用法。
2018-12-12 08:00:0052 本系統(tǒng)以 Freescale16 位單片機 MC9S12DG128 作為系統(tǒng)控制處理器,基于CCD傳感器采集視頻圖像,通過對獲得的圖像進行處理分析,獲得道路信息提取賽道黑線,并結(jié)合測速反饋實現(xiàn)對小車
2019-07-02 16:33:003 MC9S12G系列是一款優(yōu)化的汽車16位微控制器產(chǎn)品線,專注于低成本、高性能和低針數(shù)。該系列旨在連接高端8位微控制器和高性能16位微控制器,如MC9S12XS系列。MC9S12G系列針對需要CAN或
2019-08-27 16:36:1579 Freescale16位單片機MC9S12DG128作為系統(tǒng)控制處理器,基于CCD傳感器采集視頻圖像,通過對獲得的圖像進行處理分析,獲得道路信息提取賽道黑線,并結(jié)合測速反饋實現(xiàn)對小車的閉環(huán)反饋控制,后輪驅(qū)動電機控制模塊采用了模糊PID控制算法,充分的利用了內(nèi)
2019-11-26 15:35:181 以及車輛工程等多個學科交叉的科技創(chuàng)意性比賽。本文以此為背景,基于MC9S12xS128單片機設計了一種智能車系統(tǒng)。
2020-04-06 11:04:004230 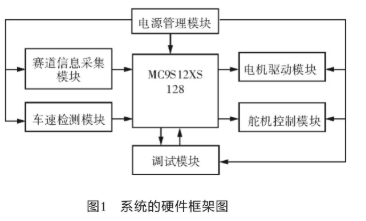
介紹了摩托羅拉16位單片機MC9S12DP256的結(jié)構(gòu)、特點及其區(qū)別于其它單片機的優(yōu)勢。通過MC0S12DP256在汽車電子門控汽車電子系統(tǒng)的應用實例,簡單介紹了MC9S12DP256單片機在汽車電子領域的應用方法。
2020-04-06 10:37:004524 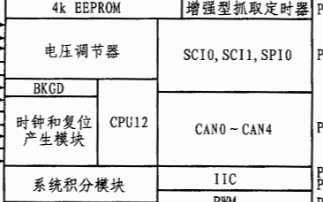
運用 Freescale S12 單片機控制模型車自動沿著黑白(電磁組是檢測賽道通有交流信號的導線來實現(xiàn)尋跡)賽道完成比賽。主要包括智能車的組裝、機械機構(gòu)的調(diào)整、系統(tǒng)設計方案和程序控制策略的選定
2020-09-21 08:00:000 本文檔的主要內(nèi)容詳細介紹的是MC9S12DG128的結(jié)構(gòu)與工作原理的學習課件免費下載包括了:MC9S12DG128的內(nèi)部結(jié)構(gòu),MC9S12DG128引腳功能,MC9S12DG128的運行模式,MC9S12DG128的存儲器組織
2020-12-28 08:00:0016 ? MC9S12xS128性能概括: MC9S12XS128是16位單片機﹐由16位中央處理單元( CPU12X)·128KB程序Flash(P-lash)8KB RAM·8KB數(shù)據(jù)Flash
2021-07-08 16:37:186745 單片機控制系統(tǒng)課程設計《基于單片機的大棚智能灌溉控制系統(tǒng)》
2022-03-07 10:37:1457 電子發(fā)燒友網(wǎng)站提供《基于XS128單片機的智能車賽道識別裝置的設計.pdf》資料免費下載
2023-10-11 14:57:450 電子發(fā)燒友網(wǎng)站提供《基于MC9S12XS128單片機的多功能智能小車.pdf》資料免費下載
2023-11-07 09:12:192 簡介:以“飛思卡爾”杯智能車大賽為研究背景,采用MC9S12XS128作為核心處理器,通過對比各個模塊不同設計方案的性能,完成智能車電源、驅(qū)動、圖像采集、測速等模塊的設計與實現(xiàn)。通過大量的實驗調(diào)試
2023-11-09 17:31:311
 電子發(fā)燒友App
電子發(fā)燒友App













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論