仿人機器人具有可移動性,具有很多的自由度,包括雙臂、頸部、腰部、雙腿等,可以完成更復雜的任務,這些關節要連接在一起,進行統一的協調控制,就對控制系統的可靠性、實時性提出了更高的要求,以往采用
2014-11-18 11:40:57 1863
1863 
、直接數字控制、人機交互以及監控和管理等功能。分布式控制系統是在計算機監督控制系統、直接數字控制系統和計算機多級控制系統的基礎上發展起來的,是生產過程的一種比較完善的控制與管理系統。在分布式控制系統中
2010-03-01 22:19:00
級別,企業家級別,操作員級別等。 分布式控制系統的應用 DCS系統可以在一個簡單的應用程序中實現,如使用微控制器網絡的負載管理。這里的輸入是從一個鍵盤給一個微控制器,與另外兩個微控制器通信。其中一個微控制器用于顯示過程的狀態以及負載,另一個微控制器控制繼電器驅動器。繼電器驅動器又驅動繼電器來操作負載。
2020-09-01 17:55:05
由多臺計算機分別控制生產過程中多個控制回路,同時又可集中獲取數據、集中管理和集中控制的自動控制系統 。分布式控制系統采用微處理機分別控制各個回路,而用中小型工業控制計算機或高性能的微處理機實施上一級的控制 。
2020-03-13 09:02:22
傳感器技術是仿人機器人研究的關鍵技術之一。仿人機器人之所以能在已知或未知的環境中完成一定的作業功能,是因為它能夠通過傳感器感知外部環境信息和自身狀態,獲得反饋信息,實現系統的閉環控制。目前在仿人機器人
2019-09-18 06:17:46
自動或半自動機器人常常需要嵌入式控制系統,從而能夠結合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執行器上。NI提供了多種嵌入式硬件平臺,以滿足復雜系統的需求。從尖端的機器人研究項目直至高級行業應用,NI平臺被證實是高效的機器人解決方案。
2019-11-06 07:50:49
TSP分布式控制有什么優勢?TSP分布式控制提高了測試速度并且降低了測試成本。
2021-05-12 06:19:56
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-10-11 09:38:12
ROVER C5 V0501 機器人控制系統采用國際流行的開放式軟硬件平臺,配以自主研發的避障控制卡、牽引運動卡及機器人內控專用編碼器和安全接口;
2019-09-12 09:00:12
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-07-05 07:08:47
研究的前沿,它在一定程度上代表了一個國家的高科技發展水平。運動控制系統是機器人控制技術的核心,也是機器人研究領域的關鍵技術之一,在機器人控制中具有舉足輕重的地位,因此,各研究機構都把對機器人運動控制系統的研究作為首要任務。
2020-08-19 06:57:09
感知外部環境信息和自身狀態,獲得反饋信息,實現系統的閉環控制。目前在仿人機器人中應用的傳感器種類繁多,例如視覺傳感器、電子羅盤、加速度計和超聲波傳感器等都是仿人機器人中常用的傳感器。DF-1機器人
2019-06-21 07:04:37
基于虛擬儀器的城市景觀照明分布式控制系統設計與實現針對城市級景觀照明系統分布廣,數量多的特點,設計一種基于虛擬儀器的可組分布式城市景觀照明控制系統。采用C8051F040 處理器構建多通道照明控制
2009-12-01 10:19:03
樹莓派和其他機器人的控制器有何不同?如何使用樹莓派開發智能機器人控制系統?
2021-12-23 06:55:02
其設計是機器人研究的核心。該控制系統通常以MCU、 DSP等為核心,采用上、下位機二級分布式結構。其中上位機一般為PC機,下位機為單片機或DSP等微控制器。但隨著移動機器人的智能化,控制方法的發展,所需
2019-07-30 07:02:31
分布式車身控制系統的結構是怎樣構成的?分布式車身控制系統有哪些功能?
2021-05-13 07:03:30
的可靠性。我們采用了PCC(計算機控制中心) ,加CAN 總線分布采集模塊,觸摸屏構成濕法皮革生產線的自動控制系統。
2019-08-13 06:12:00
移動機器人是一種能夠感知外部環境,在有障礙物的環境中能夠實現動態決策與規劃,從而完成避障等多種功能的綜合系統。機器人系統通常分為機構本體和控制系統兩部分,控制系統的作用是根據用戶的指令對機構本體進行
2020-03-06 07:07:07
隨著人口老齡化進程的加快,更多老年人,尤其是地震和疾病致殘的殘疾人,都需要照顧。基于此,這里提出一種基于ARM的嵌入式服務機器人控制系統設計。該服務機器人的控制系統是機器人的神經中樞,因而其設計是機器人研究的核心。該控制系統通常以MCU、 DSP等為核心,采用上、下位機二級分布式結構。
2019-10-15 08:03:16
模塊化的控制系統體系結構:采用分布式CPU計算機結構,分為機器人控制器(RC),運動控制器(MC),光電隔離I/O控制板、傳感器處理板和編程示教盒等。機器人控制器(RC)和編程示教盒通過串口/CAN總線
2018-11-23 10:40:38
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-06-30 06:37:34
一種介紹基于CAN/LIN總線的車門分布式控制系統設計
2021-05-14 06:44:29
,年均增長31%,預計2023年我國工業機器人市場增速將在20%至25%左右,仍會維持較快的增速。 飛凌嵌入式作為一家專注嵌入式核心控制系統研發與制造的高新技術企業,經過多年的研發與積累,產品已廣泛應用
2023-02-24 17:05:21
0引言傳感器技術是仿人機器人研究的關鍵技術之一。仿人機器人之所以能在已知或未知的環境中完成一定的作業功能,是因為它能夠通過傳感器感知外部環境信息和自身狀態,獲得反饋信息,實現系統的閉環控制。目前在仿
2019-07-29 06:09:58
針對六自由度機器人控制系統的特點以及空間環境對系統的影響,提出基于雙冗余設計思想的分布式視覺伺服控制系統。該系統由主控制計算機和關節控制器、手爪控制器、手眼視
2009-03-28 08:45:33 10
10 本文提出了一種以ARM9 為主控制器的新型的仿人機器人分布式控制系統。單片機和外部計數器組成關節控制器。主控制器和關節控制器之間采用USB 通信。從而實現了控制系統的小型
2009-05-25 15:57:4445 壁面移動機器人是運行于極限環境下的自主移動機器人,其控制系統應具備一定程度的智能和對未知環境的實時響應能力。本文提出了壁面移動機器人的控制體系結構,建立了基
2009-05-26 11:30:5919 現場總線是目前自動化技術發展的一個熱點。本文介紹基于CAN總線的分布式控制網絡系統的設計方法,給出了Intel 80C196KC+SJA1000和PIC16F877+MCP2510兩種典型的CAN總線智能節點的硬件電
2009-06-01 10:33:0124 分析了傳統的串行通信和集中式控制的缺點,提出將CAN 總線技術應用于分布式三維步進電機控制系統,給出了分布式控制網絡的拓撲結構和網絡物理層、數據鏈路層的實現方法,
2009-06-06 13:43:1223 現場總線是目前自動化技術發展的一個熱點。本文介紹基于CAN 總線的分布式控制網絡系統的設計方法,給出了Intel 80C196KC+SJA1000 和PIC16F877+MCP2510兩種典型的CAN總線智能節點的硬件電路
2009-06-12 15:51:0521 利用SIMATICS7 PLC、工業以太網和PROFIBUS 總線組成了分布式控制系統,具體描述了系統的構成以及組態實現。系統在邏輯結構上分為兩層:現場設備層和網絡控制層,PROFIBUS 用于現場設
2009-06-29 08:28:4128 本文主要以解決方案形式介紹了具有GSM 短信控制功能和公共電話網控制功能的控制系統,同時為解決分布式控制系統存在重新布線或布線困難的問題,采用無線分布式控制方式,
2009-07-30 14:47:4333 論述了由嵌入式計算機組成的3 層仿人機器人控制系統,并詳細介紹了其中的關節控制器。控制系統實行逐級控制,任務分散,提高了機器人的智能化程度。關節控制器選用TM320F2811
2009-08-05 10:51:4424 一種基于CAN 總線的變電站分布式控制系統的設計方案;給出了智能監控變電站控制系統的硬件電路、軟件設計程序和通信程序設計。在軟/硬件設計中均采用了模塊化的結構,
2009-08-25 11:39:5818 本文給出一種基于CAN 總線驅動器TJA1040 的分布式控制系統的網絡組成實現。該方法既有CAN 總線傳輸距離遠、傳輸速率快、可靠性高等的特點,又有等同于RS-232 的編程容易、接口簡單
2009-08-27 10:32:3193 本文就一種DCS 與PLC 作為上下位機的分布式控制系統,介紹基于Modbus 協議的通信網絡在其中的應用,以及該網絡的硬件構成及程序設計。關鍵詞:Modbus 協議分布式控制系統 通
2009-09-01 09:35:0716 針對軌道車輛分布式控制系統中驅動電機多而分散、系統信息量大、布線復雜、調試不方便等特點,設計了一種基于CAN 總線技術的多電機分布式控制系統。通過CAN 總線,監控主
2009-09-12 15:38:1030 針對北極冰下海洋參數監測的使命要求,對水下機器人控制系統進行了相關研究,將PC104 總線與CAN 總線應用到自主/遙控水下機器人中,實現了一種分布式與集中式相結合的水下
2009-12-19 15:21:1019 針對復雜環境下仿人機器人穩定控制的要求,設計了基于MEMS 慣性傳感器的仿人機器人足部姿態實時感知系統。同時,提出了基于慣性傳感器和足部力傳感器信息的系統累積誤
2010-01-20 14:09:3537 CAN總線是一種先進的現場總線,支持分布式控制。本文介紹了一種基于CAN總線的攤鋪機行走智能控制系統,該系統采用集成了CAN總線通訊模塊的EPEC200系列嵌入式控制器和GRAF顯示器為
2010-07-20 15:14:5641 針對城市級景觀照明系統分布廣、數量多的特點,設計一種基于虛擬儀器的可組分布式城市景觀照明控制系統.采用C8051F040處理器構建多通道照明控制硬件平臺,利用CAN總線網絡技術完
2010-09-30 16:45:1424
基于CAN總線的分布式電池管理系統
摘要:主要探討了汽車和電動汽車數字化技術、計算機控制系統的結構以及現場通
2009-07-15 09:18:191183 
基于CAN總線和雙傳感器仿人機器人運動控制系統研究
機器人研究是自動化領域最復雜。最具挑戰性的課題,它集機械。電子。計算機。材料。傳感
2009-10-10 08:57:291046 
基于CAN總線的分布式控制器設計和實現
近年來大學生的科技創新設計活動越來越豐富,而為每個機電系統設計專門的控制器不僅耗時,而且難以滿足系統的穩定性要求,這
2009-10-26 14:11:46908 
基于ARM9的嵌入式仿人機器人傳感器系統設計
0 引 言 傳感器技術是仿人機器人研究的關鍵技術之一。仿人機器人之所以能在已知或未知的環境中完成一
2009-11-10 09:29:521418 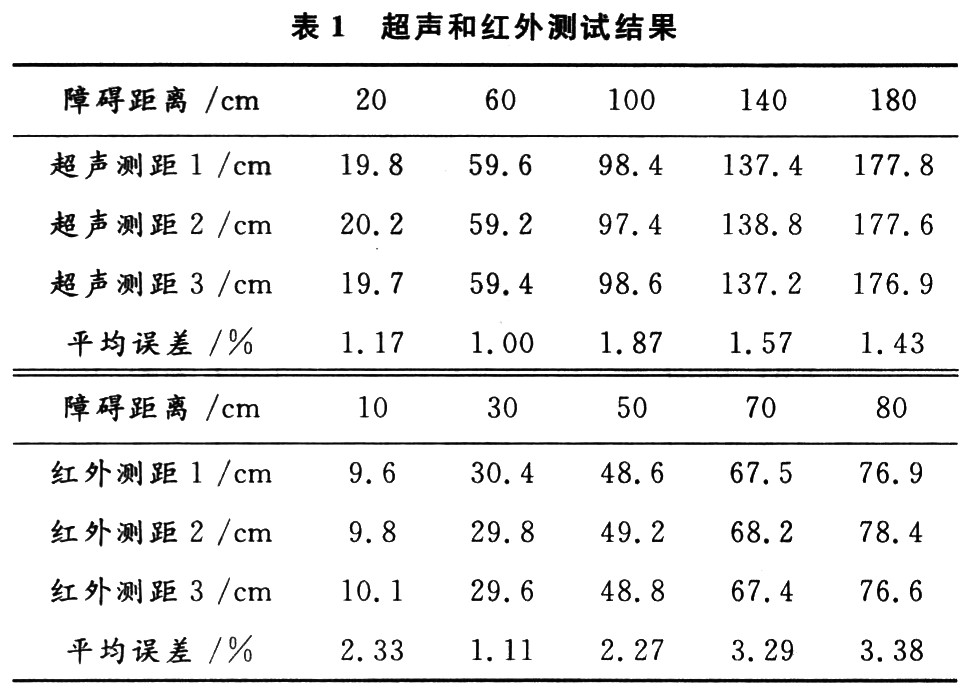
完全自主型仿人機器人成為首個參加RoboCup的仿人機器人
用NI LabVIEW開
2010-02-23 10:56:341405 GPRS網絡的PLC分布式控制系統
摘要:將PLC控制系統與現有GPRS無線通信網絡技術集成,通過GPRS網絡通信技術,可以實現全國,甚至全球范圍內的數據超遠程可靠傳輸,進
2010-04-21 18:03:211116 隨著計算機技術和現場總線技術的發展和成熟,也促使伺服系統的實現方式和體系結構在不斷地發展,將現場總線應用于運動控制,構成分布式控制的數字控制伺服系統日益受到人們的重視。基于現場總線的分布式伺服系統有很多優點,如連線少、可靠性高、易于系統的維
2011-01-19 10:19:112065 
本文選取燈光、雨刷及底盤部分電磁閥這些控制節點來說明車身控制系統如何實現分布式控制方案。
2011-01-28 16:58:011992 
DCS是分布式控制系統的英文縮寫(Distributed Control System),在國內自控行業又稱之為集散控制系統
2011-06-21 11:48:303931 以農業溫室為背景,從低成本、高品質、易推廣的角度出發,設計了一種基于分布式 現場總線 的溫室環境控制系統,并就其軟硬件設計作了較詳細的分析。所設計的以CAN 總線為通信平臺的
2011-07-06 17:06:0437 工業機器人分布式控制系統實例介紹了澆注生產線浮渣鏟除工業 機器人 分布式控制系統的設計方案、硬件結構和軟件體系工業機器人分布式控制系統是一種比較理想的快速實時控制系
2011-07-13 12:04:34112 根據單元串聯式高壓變頻控制的原理, 建立了 分布式控制 的電路拓撲結構, 提出了中央控制單元- 總線分布單元 模式的一種新的控制策略。設計的高壓變頻分布式控制系統, 以低壓功率
2011-08-26 17:16:1040 本文選用can總線設計了分布式熱電阻智能節點,利用can總線連接各個網絡節點,可以直接與主控卡或上位機通信,組建成工業網絡分布式測控系統。
2011-09-08 15:19:312419 簡述了基于CAN總線分布式控制系統的結構,并介紹了組態軟件在現場總線控制系統中的作用,給出了組態王6.51組態軟件開發監控程序的一般方法,重點分析了組態軟件在基于CAN總線的
2011-09-09 12:02:2027 針對印刷機外圍設備多分散、數據傳輸信息量大、實時性和可靠性要求高等問題,設計了一種基于CAN現場總線的分布式控制系統。監控主機運行軟PLC程序,通過PC-CAN卡與現場I/O從站進行
2011-09-21 17:05:1843 介紹了分布式控制系統和CAN總線的概念和特性。提出了一種用于智能機器人的分布式控制系統結構,時基于該控昔對系統的智能機器人的體系結構、導航與控制、環境感知進行了研究。
2012-04-25 14:57:5355 提出了一種基于CAN總線的分布式水下航行器控制器的設計方法,主要描述了其硬件總體設計方案和實現辦法。控制器作為分布式控制系統的一個節點,與其他節點之間以CAN總線連接并形
2013-06-08 17:54:5531 基于分布式控制系統的輪式智能機器人研究電子論文!資料來源網絡,如有侵權,敬請見諒
2015-11-30 11:34:035 基于現場總線的分布式智能機器人感知系統研究!資料來源網絡,如有侵權,敬請見晾
2015-11-30 11:31:328 通用智能機器人分布式控制系統的設計與實現!資料來源網絡,如有侵權,敬請原諒!
2015-12-25 09:35:255 基于CAN總線的分布式飛機客艙模擬器控制系統_郭潔
2017-01-16 13:45:151 基于CAN總線的染色機分布式控制系統_周怡君
2017-03-19 11:33:110 結合 CAN 總線和 LIN 總線各自的優缺點,設計實現了基于 CAN/LIN 總線的分層式車門控制系統,首先講述了集中式控制系統結構和分布式控制系統結構的實現及相應的特點,論述了選定分布式結構的原因,然后詳述了車門分布式系統的實現及相關技術。
2017-09-08 10:58:187 基于CAN總線的分布式船舶火災自動監控系統
2017-09-25 13:27:4814 本文將介紹一種應用于尋跡小車的分布式控制系統的設計方法,該系統可對電機模塊、傳感器模塊和燈控模塊進行分布式控制。這樣設計是為該系統將來從尋跡小車到真車進行移植提供方便。 此尋跡小車模型采用7.5V
2017-11-21 10:19:073 分布式控制系統的安全和穩定運行十分重要的同步控制、故障響應等問題,并就分布式系統的直流母線電壓平衡控制展開討論。通過6kV/1MV.A鏈式STATCOM的并網實驗,驗證分布式控制系統的有效性、可擴展性以及可靠性。
2018-01-02 18:20:230 的機械結構進行了設計;對機器人控制系統進行了設計,提出了一種基于DSP+ FPCJA的主控系統,將多CPU協同工作、分布式遠程控制技術應用到仿人機器人行走控制中;利用人類行走過程中各關節的轉動參數為輸入的控制方法,在ADAMS上進行了步
2018-03-02 15:59:301 分布式控制與集中式運動控制系統的比較 CAN物理層 CANopen協議 驅動器與運動控制設備概述 多軸同步協調運動 IDMxxx(CAN/CANopen)系列全數字通用伺服驅動器
2018-09-03 08:00:009 針對傳統控制系統過于復雜的缺點,本文提出一種高壓變頻的分布式控制策略,系統采用“中央控制單元-總線-分布控制單元”的分布式控制。
2019-11-27 08:00:003622 
本文將介紹一種應用于尋跡小車的分布式控制系統的設計方法,該系統可對電機模塊、傳感器模塊和燈控模塊進行分布式控制。這樣設計是為該系統將來從尋跡小車到真車進行移植提供方便。
2019-10-17 07:59:004212 Freelance最初版本發布于1994年,是ABB針對過程工業提供的經濟高效的分布式控制系統(DCS)解決方案。它結合了DCS與可編程邏輯控制器(PLC)的優點,具有易用性、可擴展性、靈活性和可靠性的特點。Freelance 2019是該分布式控制系統的最新版本。
2018-12-06 16:19:385770 為了實現機器人應用系統的協調問題,實現多個控制模塊之間的通信,現設計并實現了一種基于UART的機器人分布式控制通信協議。硬件上采用RS-485型電氣接口,分析了控制網絡的信息模型,實現了令牌環控制
2018-12-19 16:46:547 分布式控制系統是最流行的,它是專門設計的冗余和診斷功能,以提高控制的可靠性和性能。它為控制分布式離散現場設備及其操作站提供了更大的靈活性。
2019-07-01 14:19:286116 
蘭州重離子加速器冷卻存儲環工程(HIRFL_CSR) 控制系統是一個由CSR 電源系統、注入引出系統、內靶系統、真空系統、電子冷卻系統等多個分系統組成的多層分布式控制系統, 各分系統通過以太網與前端控制系統連接,其前端控制系統是以嵌入式計算機為控制節點的分布式控制子系統, 系統組成框圖見圖1。
2020-04-26 09:17:301424 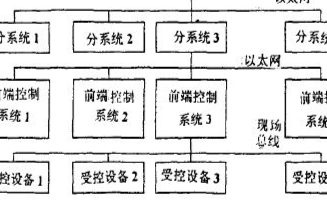
隨著嵌入式微機控制技術和現場總線技術的發展,現代列車的過程控制已從集中型的直接數字控制系統發展成為基于網絡的分布式控制系統。基于分布式控制的MVB(多功能車輛總線)是IEC61375-1(1999
2020-05-31 09:28:001713 
CAN屬于現場總線的范疇,它是一種有效支持分布式控制或實時控制的串行通信網絡。較之許多RS-485基于R線構建的分布式控制系統而言,基于CAN總線的分布式控制系統在以下方面具有明顯的優越性。
2020-06-10 11:12:532283 視覺跟蹤的實時性是仿人機器人的重要性能要求之一。針對這一系統要求,近年來有很多學者設計出了多種系統結構。文中作者設計了一種基于CAN總線的分布式的仿人機器人的控制系統,其中的視覺系統通過無線局域網
2021-04-13 14:18:463970 
一種基于DSP與USB總線的新型開放式移動機器人控制系統,其機器人以PC為上位計算機,用一塊DSP運動控制卡對杋器人的兩個步進電杋進行控制。并釆用USB總線進行上下位機之間的通訊,很好地實現了機器人
2021-04-26 16:35:5121 用于可編程邏輯控制和分布式控制系統的ICS
2021-05-09 12:38:153 Freelance 800F分布式控制系統說明。
2021-05-14 09:24:575 在航空發動機分布式控制系統的研究過程中,為保證系統的可靠性,對通訊總線的實時性和確定性提出了更高的要求。在現有航空發動機分布式控制系統CAN總線的研究成果基礎上,提出將時間觸發TCAN總線應用于
2021-05-17 14:33:1114 基于CAN總線的水下航行器分布式控制系統
2021-07-01 16:53:379 隨著科技的不斷進步,分布式控制系統在各個領域得到了廣泛應用。其中,訊維可視化分布式控制系統在智能電網、工業控制、交通運輸等領域具有顯著優勢。本文將詳細介紹該系統的背景、意義以及相關技術,同時分析其
2023-08-25 09:54:472417 
訊維分布式控制系統是一種基于分布式計算技術的控制系統,它利用多臺計算機協同工作,將計算任務分配到多個計算機節點上進行處理,從而實現更高效的計算和控制能力。該系統采用模塊化設計,由多個子系統組成,各
2023-08-28 11:44:341776 
訊維分布式控制系統在工業、能源、交通等領域具有廣泛的應用研究,以下是幾個具體的應用場景: 工業自動化:在工業自動化領域,訊維分布式控制系統可以應用于生產線上的機器人控制、自動化設備監測等場景。通過將
2023-08-28 11:45:211257 隨著科技的不斷進步,分布式控制系統在各個領域得到了廣泛應用。其中,訊維可視化分布式控制系統在智能電網、工業控制、交通運輸等領域具有顯著優勢。本文將詳細介紹該系統的背景、意義以及相關技術,同時分析其應用場景、實際效益及未來發展前景。
2023-09-01 16:00:132289 電子發燒友網站提供《基于SSVEP仿人機器人異步腦機接口控制系統.pdf》資料免費下載
2023-11-03 09:34:520 分布式控制系統的七個功能和應用? 分布式控制系統是一種由多個獨立的控制單元組成的系統,每個控制單元負責系統中的一部分功能。它具有分散的、自治的特性,可以提高系統的可靠性、靈活性和可擴展性。分布式控制系統
2024-02-01 10:51:592746 國產超高精度AFE替換AD7124應用于分布式控制系統
2025-03-12 10:15:00779 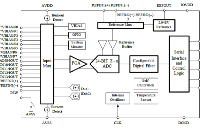
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論