1引言
隨著計(jì)算機(jī)技術(shù)和網(wǎng)絡(luò)技術(shù)的發(fā)展,各種新型的控制方式應(yīng)用于機(jī)器人控制。分布式控制系統(tǒng)是在計(jì)算機(jī)監(jiān)督控制系統(tǒng)、直接數(shù)字控制系統(tǒng)和計(jì)算機(jī)多級(jí)控制
2010-12-03 11:02:43 1632
1632 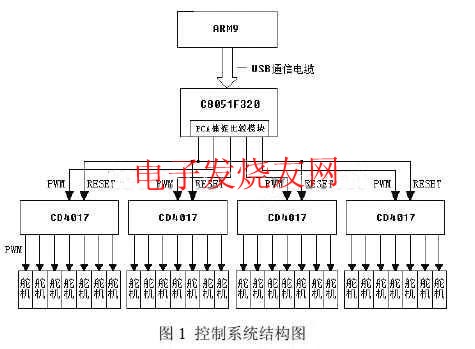
仿人機(jī)器人一直是自動(dòng)控制領(lǐng)域研究的熱點(diǎn)。在模仿人類進(jìn)行邁步行走時(shí),由于仿人機(jī)器人的重心經(jīng)常要處于中心線以外的區(qū)域,使得它的身體很難保持站姿平衡,能夠穩(wěn)定地實(shí)現(xiàn)雙足行走是仿人機(jī)器人研究的重點(diǎn)也是難點(diǎn)。
2011-01-23 16:42:371989 
,就能依靠經(jīng)驗(yàn),學(xué)習(xí)到很多更好的作業(yè)方法,并且熟練掌握。 機(jī)器人傳感器可分為機(jī)器人內(nèi)部傳感器和機(jī)器人外部傳感器兩種。機(jī)器人內(nèi)部傳感器的功能是測(cè)量運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)參數(shù),其提供信息的目的是控制機(jī)器人按規(guī)定
2018-01-03 17:09:03
一般機(jī)器人系統(tǒng)由機(jī)械手、環(huán)境、任務(wù)和控制器四個(gè)互相作用的部分組成。我們稱一般安裝在機(jī)器人機(jī)械手上的傳感器為內(nèi)傳感器(Inner Sensons),而稱作為環(huán)境的一部分的傳感器為外傳感器
2021-09-16 08:45:39
一般機(jī)器人系統(tǒng)由機(jī)械手、環(huán)境、任務(wù)和控制器四個(gè)互相作用的部分組成。我們稱一般安裝在機(jī)器人機(jī)械手上的傳感器為內(nèi)傳感器(Inner Sensons),而稱作為環(huán)境的一部分的傳感器為外傳感器
2018-11-08 15:55:32
傳感器網(wǎng)絡(luò)與移動(dòng)機(jī)器人控制新版機(jī)器人技術(shù)手冊(cè)智能足球機(jī)器人系統(tǒng)多足步行機(jī)器人運(yùn)動(dòng)規(guī)劃與控制基于16/32位DSP機(jī)器人控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)仿人多指靈巧手及其操作控制機(jī)器人技術(shù)基礎(chǔ)機(jī)器人機(jī)構(gòu)學(xué)的數(shù)學(xué)
2015-02-22 07:34:56
機(jī)器人的運(yùn)動(dòng)原理還是屬于最基本的簡(jiǎn)單機(jī)械。機(jī)器人運(yùn)動(dòng)主要是依靠什么裝置?有些什么裝置是機(jī)器人用的比較多的?
2015-02-03 11:22:01
1、機(jī)器人的控制系統(tǒng)“控制”的目的是使被控對(duì)象產(chǎn)生控制者所期望的行為方式。 .“控制”的基本條件是了解被控對(duì)象的特性。 “實(shí)質(zhì)”是對(duì)驅(qū)動(dòng)器輸出力矩的控制。2、機(jī)器人示教原理機(jī)器人的基本工作原理是示教
2021-09-13 08:40:55
傳感器技術(shù)是仿人機(jī)器人研究的關(guān)鍵技術(shù)之一。仿人機(jī)器人之所以能在已知或未知的環(huán)境中完成一定的作業(yè)功能,是因?yàn)樗軌蛲ㄟ^傳感器感知外部環(huán)境信息和自身狀態(tài),獲得反饋信息,實(shí)現(xiàn)系統(tǒng)的閉環(huán)控制。目前在仿人機(jī)器人
2019-09-18 06:17:46
抓加緊電機(jī)等多種電機(jī)進(jìn)行伺服控制。電機(jī)的種類和數(shù)量相對(duì)繁多,因此機(jī)器人控制系統(tǒng)相對(duì)比較復(fù)雜。本文主要研究了覆冰機(jī)器人的行走電機(jī)伺服控制。行走電機(jī)需要帶動(dòng)機(jī)器人在線路上行走,當(dāng)線路有較大覆冰時(shí)要帶動(dòng)除冰
2011-09-28 17:47:13
文中提出的TMS320DM6437+TMS320F28015的軟硬件設(shè)計(jì)方案在新型球形機(jī)器人控制系統(tǒng)中得到初步應(yīng)用,驗(yàn)證了理論設(shè)計(jì)的可行性和可靠性,實(shí)驗(yàn)結(jié)果表明接口數(shù)據(jù)讀寫高效可靠。本設(shè)計(jì)對(duì)以后其他雙核控制系統(tǒng)接口的設(shè)計(jì)與研究工作具有很好的參考價(jià)值。
2021-05-27 06:46:44
LabVIEW開發(fā)六軸工業(yè)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)
本項(xiàng)目開發(fā)了一個(gè)高效的工業(yè)機(jī)器人控制系統(tǒng),重點(diǎn)關(guān)注于運(yùn)動(dòng)學(xué)算法和軌跡規(guī)劃算法的實(shí)現(xiàn)和測(cè)試。LabVIEW作為一個(gè)關(guān)鍵技術(shù),在項(xiàng)目中扮演了核心角色
2023-12-21 20:03:18
`1、 教學(xué)領(lǐng)域:1) 計(jì)算機(jī):可用NAO機(jī)器人驗(yàn)證代碼,編寫相關(guān)程序,以及3D仿真與實(shí)體之間的邏輯關(guān)系;2) 自動(dòng)化:研究個(gè)體和多機(jī)器人控制,以及多種傳感器信息融合;3) 機(jī)械:機(jī)械結(jié)構(gòu)設(shè)計(jì)
2015-02-12 15:17:18
自動(dòng)或半自動(dòng)機(jī)器人常常需要嵌入式控制系統(tǒng),從而能夠結(jié)合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執(zhí)行器上。NI提供了多種嵌入式硬件平臺(tái),以滿足復(fù)雜系統(tǒng)的需求。從尖端的機(jī)器人研究項(xiàng)目直至高級(jí)行業(yè)應(yīng)用,NI平臺(tái)被證實(shí)是高效的機(jī)器人解決方案。
2019-11-06 07:50:49
無論是傳統(tǒng)的工業(yè)機(jī)器人系統(tǒng),還是當(dāng)今最先進(jìn)的協(xié)作機(jī)器人(Cobot),它們都要依靠可生成大量高度可變數(shù)據(jù)的傳感器。這些數(shù)據(jù)有助于構(gòu)建更佳的機(jī)器學(xué)習(xí)(ML)和人工智能(AI)模型。而機(jī)器人依靠這些模型變得“自主”,可在動(dòng)態(tài)的現(xiàn)實(shí)環(huán)境中做出實(shí)時(shí)決策和導(dǎo)航。
2020-08-05 07:08:21
:設(shè)計(jì)一種基于ARM的智能清潔機(jī)器人控制系統(tǒng)。機(jī)器人能對(duì)未知的室內(nèi)環(huán)境進(jìn)行全面清掃具備避障和臺(tái)階檢測(cè)功能能實(shí)現(xiàn)電量管理自動(dòng)返回充電。內(nèi)容包括:1、基于單片機(jī)對(duì)直流電機(jī)的啟動(dòng)、轉(zhuǎn)向、轉(zhuǎn)速、正反轉(zhuǎn)程序
2015-07-06 10:59:02
機(jī)器人運(yùn)動(dòng)控制系統(tǒng),給公司選擇一款非常合適做運(yùn)動(dòng)控制的板卡、提供一種新的解決方案。 ①根據(jù)米爾MYD-Y6ULX開發(fā)板提供的資料,搭建開發(fā)環(huán)境 ②移植CANopen協(xié)議、數(shù)據(jù)存儲(chǔ)、建立軟件框架 ③實(shí)現(xiàn)
2018-01-22 10:32:40
一種小型移動(dòng)機(jī)器人的控制系統(tǒng)研究
2012-08-20 15:53:10
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
ROVER C5 V0501 機(jī)器人控制系統(tǒng)采用國(guó)際流行的開放式軟硬件平臺(tái),配以自主研發(fā)的避障控制卡、牽引運(yùn)動(dòng)卡及機(jī)器人內(nèi)控專用編碼器和安全接口;
2019-09-12 09:00:12
,運(yùn)動(dòng)學(xué)部分從坐標(biāo)變換人手,介紹了正向運(yùn)動(dòng)學(xué)方程的建立、逆向運(yùn)動(dòng)學(xué)的求解以及機(jī)器人的微分運(yùn)動(dòng)等內(nèi)容。控制結(jié)構(gòu)篇著重介紹機(jī)器人的傳感技術(shù)、位置控制和力控制。針對(duì)機(jī)器人控制領(lǐng)域的研究動(dòng)態(tài)和主要研究方向,先進(jìn)控制篇介紹了傳感信息融合、視覺控制、協(xié)調(diào)控制、移動(dòng)機(jī)器人技術(shù)、智能控制方法等。
2017-09-19 15:30:57
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-07-05 07:08:47
。這對(duì)協(xié)作機(jī)器人的感知、控制都要求很高。成本低協(xié)作機(jī)器人面向中小企業(yè),盡可能低的成本是非常重要,但往往成本低性能也會(huì)隨之降低,如果在控制成本的同時(shí)提高性能,是相對(duì)較難的。3不可或缺——伺服和傳感器協(xié)作
2018-10-12 11:02:18
一。引言 機(jī)器人研究是自動(dòng)化領(lǐng)域最復(fù)雜。最具挑戰(zhàn)性的課題,它集機(jī)械。電子。計(jì)算機(jī)。材料。傳感器。控制技術(shù)等多門學(xué)科于一體,是多學(xué)科高技術(shù)成果的集中體現(xiàn)。而仿人步行機(jī)器人技術(shù)的研究更是處于機(jī)器人課題
2020-08-19 06:57:09
協(xié)調(diào)完成多傳感信息的融合,而運(yùn)動(dòng)執(zhí)行層完成機(jī)器人行走。圖1為智能導(dǎo)覽機(jī)器人的總體結(jié)構(gòu)框圖。3 導(dǎo)覽機(jī)器人硬件設(shè)計(jì)3.1 人工智能層硬件實(shí)現(xiàn) 考慮到移動(dòng)機(jī)器人控制系統(tǒng)要求處理速度快、方便外圍設(shè)備擴(kuò)展
2019-07-04 08:30:00
裝或夾具并改變機(jī)器人程序,即可焊接曲線結(jié)構(gòu)工件。工位布局如圖 2 所示。2 電氣控制系統(tǒng)設(shè)計(jì)焊接系統(tǒng)由庫卡機(jī)器人本體、機(jī)器人控制器、焊機(jī)、PLC、觸摸屏、接觸傳感器及電弧傳感器組成,其框架如圖 3
2018-03-13 09:15:48
感知外部環(huán)境信息和自身狀態(tài),獲得反饋信息,實(shí)現(xiàn)系統(tǒng)的閉環(huán)控制。目前在仿人機(jī)器人中應(yīng)用的傳感器種類繁多,例如視覺傳感器、電子羅盤、加速度計(jì)和超聲波傳感器等都是仿人機(jī)器人中常用的傳感器。DF-1機(jī)器人
2019-06-21 07:04:37
研究了一種用FPGA技術(shù)實(shí)現(xiàn)三輪全方位移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)的方法,與雙DSP結(jié)構(gòu),DSP+CPLD結(jié)構(gòu),以及DSP+專用集成電路結(jié)構(gòu)等相比,該方法具有簡(jiǎn)單可靠,擴(kuò)展性強(qiáng)等特點(diǎn)。且FPGA設(shè)計(jì)簡(jiǎn)單,使用方便,開發(fā)周期短,能夠?qū)崿F(xiàn)真正的SOPC系統(tǒng)。
2019-10-22 07:35:19
版,危險(xiǎn)信號(hào)報(bào)警器,歸納起來為兩大類,只能給安裝和信息顯示裝置。(6)控制系統(tǒng)控制系統(tǒng)的任務(wù)是根據(jù)機(jī)器人的作業(yè)指令程序以及從床啊勃起的反饋回來的信號(hào),支配機(jī)器人的執(zhí)行機(jī)構(gòu)去完成規(guī)定的運(yùn)動(dòng)和功能,列如工業(yè)
2016-03-06 12:56:19
樹莓派和其他機(jī)器人的控制器有何不同?如何使用樹莓派開發(fā)智能機(jī)器人控制系統(tǒng)?
2021-12-23 06:55:02
其設(shè)計(jì)是機(jī)器人研究的核心。該控制系統(tǒng)通常以MCU、 DSP等為核心,采用上、下位機(jī)二級(jí)分布式結(jié)構(gòu)。其中上位機(jī)一般為PC機(jī),下位機(jī)為單片機(jī)或DSP等微控制器。但隨著移動(dòng)機(jī)器人的智能化,控制方法的發(fā)展,所需
2019-07-30 07:02:31
性能與可靠的機(jī)械控制性能的同時(shí)保證,才能在短時(shí)間內(nèi)準(zhǔn)確尋找到火源并滅火回家。在此以ARM9處理器為核心,對(duì)基于嵌入式系統(tǒng)的智能滅火機(jī)器人進(jìn)行了設(shè)計(jì)。本文將從硬件和軟件方面講述智能滅火機(jī)器人控制器的實(shí)現(xiàn)方法,并且給出了機(jī)器人滅火的具體實(shí)驗(yàn),驗(yàn)證了方案的可行性,為智能滅火機(jī)器人的進(jìn)一步研究提供了平臺(tái)。
2019-07-31 06:23:18
電視攝像機(jī)、三角測(cè)距儀、碰撞傳感器、驅(qū)動(dòng)電機(jī)以及編碼器,并通過無線通訊系統(tǒng)由二臺(tái)計(jì)算機(jī)控制,可以進(jìn)行簡(jiǎn)單的自主導(dǎo)航。
2020-05-14 08:15:00
移動(dòng)機(jī)器人是一種能夠感知外部環(huán)境,在有障礙物的環(huán)境中能夠?qū)崿F(xiàn)動(dòng)態(tài)決策與規(guī)劃,從而完成避障等多種功能的綜合系統(tǒng)。機(jī)器人系統(tǒng)通常分為機(jī)構(gòu)本體和控制系統(tǒng)兩部分,控制系統(tǒng)的作用是根據(jù)用戶的指令對(duì)機(jī)構(gòu)本體進(jìn)行
2020-03-06 07:07:07
隨著人口老齡化進(jìn)程的加快,更多老年人,尤其是地震和疾病致殘的殘疾人,都需要照顧。基于此,這里提出一種基于ARM的嵌入式服務(wù)機(jī)器人控制系統(tǒng)設(shè)計(jì)。該服務(wù)機(jī)器人的控制系統(tǒng)是機(jī)器人的神經(jīng)中樞,因而其設(shè)計(jì)是機(jī)器人研究的核心。該控制系統(tǒng)通常以MCU、 DSP等為核心,采用上、下位機(jī)二級(jí)分布式結(jié)構(gòu)。
2019-10-15 08:03:16
模塊化的控制系統(tǒng)體系結(jié)構(gòu):采用分布式CPU計(jì)算機(jī)結(jié)構(gòu),分為機(jī)器人控制器(RC),運(yùn)動(dòng)控制器(MC),光電隔離I/O控制板、傳感器處理板和編程示教盒等。機(jī)器人控制器(RC)和編程示教盒通過串口/CAN總線
2018-11-23 10:40:38
如何去驗(yàn)證電機(jī)的運(yùn)動(dòng)性能?怎樣去設(shè)計(jì)一種基于STM32F407ZGT6芯片控制板機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)?
2021-06-29 08:34:12
度,并配有扭轉(zhuǎn)傳感器;共有 51 個(gè)關(guān)節(jié),可以完成高度靈活的運(yùn)動(dòng),,能夠靈敏地進(jìn)行操作和交互運(yùn)動(dòng)。該機(jī)器人的雙手可以嫻熟地操作物體,例如搬移木箱或者沏茶。后者需要復(fù)雜的動(dòng)作協(xié)調(diào)性。機(jī)器人必須一只手抓住
2015-01-21 17:11:24
系統(tǒng)的幫助下,自主完成人類指定的工作,如果傳感器的精度差,會(huì)直接影響機(jī)器人的作業(yè)質(zhì)量,如果傳感器不穩(wěn)定或者可靠性不高,很容易導(dǎo)致智能機(jī)器人出現(xiàn)故障,輕者導(dǎo)致工作不能正常運(yùn)行,嚴(yán)重者還會(huì)造成嚴(yán)重的事故
2015-01-20 14:56:46
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-06-30 06:37:34
軟件構(gòu)建微小的控制系統(tǒng),在機(jī)器人的末梢或手臂部分安裝必要的傳感器,來控制機(jī)器人的手臂運(yùn)動(dòng),監(jiān)測(cè)工作中的異常情況,同時(shí)也保證了安全生產(chǎn)的進(jìn)行。而在當(dāng)下機(jī)器人傳感器系統(tǒng)設(shè)計(jì)中,下一步的趨勢(shì)將會(huì)是借助傳感器
2015-02-04 16:35:49
什么是激光SLAM?激光SLAM技術(shù)在機(jī)器人運(yùn)動(dòng)控制系統(tǒng)中的應(yīng)用是什么?
2021-07-30 06:37:25
控制和通信 IC 的發(fā)展在實(shí)現(xiàn)下一代的機(jī)器人中起到重要作用。然而,這些復(fù)雜的現(xiàn)代機(jī)器人的核心是許多新的、小型化和低成本的傳感技術(shù)的出現(xiàn)與融合。對(duì)實(shí)現(xiàn)下一代機(jī)器人至關(guān)重要的幾項(xiàng)關(guān)鍵傳感器技術(shù)包括磁性位置傳感器、存在傳感器、手勢(shì)傳感器、力矩傳感器、環(huán)境傳感器和電源管理傳感器。
2019-07-31 07:46:31
移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)及控制算法研究
2012-08-20 15:54:16
控制器(運(yùn)動(dòng)控制)、伺服驅(qū)動(dòng)器、IO模塊和電源系統(tǒng)4個(gè)部分。 機(jī)器人控制系統(tǒng) 機(jī)器人控制器是機(jī)器人的核心部分,主要控制機(jī)器人在工作空間中的運(yùn)動(dòng)位置、姿態(tài)和軌跡,以及操作順序等;機(jī)器人的每個(gè)關(guān)節(jié)都
2023-02-24 17:05:21
0引言傳感器技術(shù)是仿人機(jī)器人研究的關(guān)鍵技術(shù)之一。仿人機(jī)器人之所以能在已知或未知的環(huán)境中完成一定的作業(yè)功能,是因?yàn)樗軌蛲ㄟ^傳感器感知外部環(huán)境信息和自身狀態(tài),獲得反饋信息,實(shí)現(xiàn)系統(tǒng)的閉環(huán)控制。目前在仿
2019-07-29 06:09:58
本文提出了一種以ARM9 為主控制器的新型的仿人機(jī)器人分布式控制系統(tǒng)。單片機(jī)和外部計(jì)數(shù)器組成關(guān)節(jié)控制器。主控制器和關(guān)節(jié)控制器之間采用USB 通信。從而實(shí)現(xiàn)了控制系統(tǒng)的小型
2009-05-25 15:57:44 45
45 旋轉(zhuǎn)電弧傳感弧焊機(jī)器人焊縫實(shí)時(shí)糾偏系統(tǒng)研究:本文介紹了以高速旋轉(zhuǎn)電弧為傳感器的弧焊機(jī)器人焊縫實(shí)時(shí)糾偏系統(tǒng), 首先設(shè)計(jì)了適應(yīng)機(jī)器人要求的高速旋轉(zhuǎn)電弧傳感器, 然后對(duì)電
2009-06-06 18:03:4224 論述了由嵌入式計(jì)算機(jī)組成的3 層仿人機(jī)器人控制系統(tǒng),并詳細(xì)介紹了其中的關(guān)節(jié)控制器。控制系統(tǒng)實(shí)行逐級(jí)控制,任務(wù)分散,提高了機(jī)器人的智能化程度。關(guān)節(jié)控制器選用TM320F2811
2009-08-05 10:51:4424 根據(jù)智能機(jī)器人的控制要求,提出了機(jī)器人控制系統(tǒng)的頂層核心控制器和底層運(yùn)動(dòng)控制器的雙層結(jié)構(gòu),底層與頂層基于CAN 總線完成關(guān)節(jié)狀態(tài)信息的上傳和運(yùn)動(dòng)指令的下達(dá)。在此基礎(chǔ)
2009-12-16 16:39:4029 針對(duì)復(fù)雜環(huán)境下仿人機(jī)器人穩(wěn)定控制的要求,設(shè)計(jì)了基于MEMS 慣性傳感器的仿人機(jī)器人足部姿態(tài)實(shí)時(shí)感知系統(tǒng)。同時(shí),提出了基于慣性傳感器和足部力傳感器信息的系統(tǒng)累積誤
2010-01-20 14:09:3537 基于ARM9的嵌入式仿人機(jī)器人傳感器系統(tǒng)設(shè)計(jì)
0 引 言 傳感器技術(shù)是仿人機(jī)器人研究的關(guān)鍵技術(shù)之一。仿人機(jī)器人之所以能在已知或未知的環(huán)境中完成一
2009-11-10 09:29:521418 
基于DSP仿人機(jī)器人關(guān)節(jié)控制器設(shè)計(jì)
0 引 言 仿人機(jī)器人具有可移動(dòng)性,具有很多的自由度,包括雙臂、頸部、腰部、雙腿等,可以完成更復(fù)雜的任務(wù),
2009-11-24 09:36:491515 
完全自主型仿人機(jī)器人成為首個(gè)參加RoboCup的仿人機(jī)器人
用NI LabVIEW開
2010-02-23 10:56:341405 摘要:針對(duì)小型仿人機(jī)器人的零力矩點(diǎn)(ZMP)軌跡在線確定問題,設(shè)計(jì)了一種基于多個(gè)簡(jiǎn)單一維力/力矩傳感器的腳底傳感陣列系統(tǒng)以及一種距離可調(diào)的多孔、雙夾板機(jī)構(gòu),用以安裝力/力矩傳感器,并實(shí)現(xiàn)了腳底傳感器信號(hào)多級(jí)放大及采集軟硬件系統(tǒng)。應(yīng)用CAN總線接口實(shí)
2011-02-08 15:52:4663 摘要:提出了一種基于AVR單片機(jī)Atmega8為核心控制器的比賽機(jī)器人控制系統(tǒng),通過比賽機(jī)器人的特征分析,闡述了構(gòu)成控制系統(tǒng)所需的主控單元、電機(jī)驅(qū)動(dòng)單元、傳感檢測(cè)單元及LCD顯示單元,其中詳細(xì)分析了以MCBL3006S為核心的伺服電機(jī)驅(qū)動(dòng)單元,以及關(guān)系比賽機(jī)器人基本
2011-02-11 15:06:5687 對(duì)微型足球機(jī)器人低層控制系統(tǒng)進(jìn)行了研究,給出了一種以87C196KC為核心輔以LM629運(yùn)動(dòng)控制器構(gòu)成的雙閉環(huán)微型足球機(jī)器人低層控制系統(tǒng).由于采用了集成運(yùn)動(dòng)控制芯片,不僅簡(jiǎn)化了系統(tǒng)軟硬
2011-03-24 12:14:1557 機(jī)器人多傳感器測(cè)距系統(tǒng)研究與設(shè)計(jì)......
2015-12-23 14:46:4910 基于DSP的清洗機(jī)器人模糊控制系統(tǒng)研究2008。
2016-04-05 10:30:1214 異步電機(jī)無速度傳感器直接轉(zhuǎn)矩控制系統(tǒng)研究
2016-05-04 15:26:2810 仿人機(jī)器人復(fù)雜動(dòng)作設(shè)計(jì)中人——體運(yùn)動(dòng)數(shù)據(jù)提取及分析方法(1)
2016-05-30 15:08:132 電子開發(fā)機(jī)器人相關(guān)教程資料——全自主移動(dòng)機(jī)器人控制系統(tǒng)研究
2016-09-06 16:42:430 仿人機(jī)器人一直是自動(dòng)控制領(lǐng)域研究的熱點(diǎn)。在模仿人類進(jìn)行邁步行走時(shí),由于仿人機(jī)器人的重心經(jīng)常要處于中心線以外的區(qū)域,使得它的身體很難保持站姿平衡,能夠穩(wěn)定地實(shí)現(xiàn)雙足行走是仿人機(jī)器人研究的重點(diǎn)也是難點(diǎn)。
2016-09-19 10:53:1947 仿人機(jī)器人混聯(lián)靈巧手臂設(shè)計(jì)及運(yùn)動(dòng)學(xué)逆解研究_秦利
2017-01-08 11:20:200 應(yīng)用超聲波傳感器設(shè)計(jì)水位自動(dòng)控制系統(tǒng)研究
2017-01-14 12:27:2919 基于CAN總線的EPS通信系統(tǒng)研究
2017-01-14 11:27:1217 管道檢測(cè)機(jī)器人控制系統(tǒng)設(shè)計(jì)與運(yùn)動(dòng)研究_蔡輝
2017-03-19 11:30:431 傳統(tǒng)的機(jī)器人運(yùn)動(dòng)控制器大部分是以嵌入式單片機(jī)為核心的,但其運(yùn)算速度和處理能力遠(yuǎn)不能滿足機(jī)器人控制系統(tǒng)飛速發(fā)展的需要,日益成為阻礙機(jī)器人技術(shù)進(jìn)步的瓶頸。隨著以電子計(jì)算機(jī)和數(shù)字電子技術(shù)為代表的現(xiàn)代高技術(shù)
2017-10-23 14:36:282 本文設(shè)計(jì)了穩(wěn)態(tài)視覺誘發(fā)也位(SSVEP)空閑狀態(tài)檢測(cè)的特征提取方法,建立了基十SSVEP 的異步腦機(jī)接L.二級(jí)分類器結(jié)構(gòu),開發(fā)了基于TI CC2430 芯片的無線傳感器網(wǎng)絡(luò)模塊,實(shí)現(xiàn)了機(jī)器人控制命令
2017-10-23 15:08:298 機(jī)器人控制系統(tǒng)的功能是接收來自傳感器的檢測(cè)信號(hào),根據(jù)操作任務(wù)的要求,驅(qū)動(dòng)機(jī)械臂中的各臺(tái)電動(dòng)機(jī)就像我們人的活動(dòng)需要依賴自身的感官一樣,機(jī)器人的運(yùn)動(dòng)控制離不開傳感器。機(jī)器人需要用傳感器來檢測(cè)各種狀態(tài)
2018-01-10 10:04:1536924 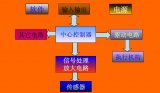
弧焊機(jī)器人作為工業(yè)機(jī)器人中使用最為廣泛的一種機(jī)器人,其控制系統(tǒng)的研究一直是行業(yè)的熱點(diǎn)。針對(duì)常規(guī)示教再現(xiàn)型系統(tǒng)無法滿足復(fù)雜焊縫加工精度的問題,本文基于GUC-T嵌入式運(yùn)動(dòng)控制器設(shè)計(jì)了一套包括示教再現(xiàn)
2018-01-30 10:58:010 針對(duì)大型17R加藤一郎結(jié)構(gòu)雙足機(jī)器人仿人行走控制問題,從仿人機(jī)器人的機(jī)械結(jié)構(gòu)、控制系統(tǒng)、步態(tài)仿真、動(dòng)力學(xué)參數(shù)等方面對(duì)機(jī)器人的影響進(jìn)行了研究,采用仿生學(xué)原理,參考了人體上、下半身比例特點(diǎn),對(duì)機(jī)器人
2018-03-02 15:59:301 北京理工大學(xué)借鑒人類長(zhǎng)期進(jìn)化所具備自然、快速、協(xié)調(diào)運(yùn)動(dòng)機(jī)理和靈巧結(jié)構(gòu)特征,創(chuàng)新地研究了仿人機(jī)器人的仿生運(yùn)動(dòng)規(guī)劃、控制與系統(tǒng)集成等關(guān)鍵技術(shù),取得了新突破。
2018-03-05 08:58:1816796 本文首先介紹了伺服運(yùn)動(dòng)控制系統(tǒng)主要特點(diǎn),其次介紹了伺服運(yùn)動(dòng)控制系統(tǒng)工作原理,最后從機(jī)器人移動(dòng)方式的選擇與結(jié)構(gòu)設(shè)計(jì)、移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)及機(jī)器人的控制系統(tǒng)設(shè)計(jì)三個(gè)方面來詳細(xì)介紹機(jī)器人伺服運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì),具體的跟隨小編一起來了解一下。
2018-06-01 14:19:3617071 仿人機(jī)器人的研究最早可以追溯到上世紀(jì)中期,先是模擬人的手臂功能,到后來才開始對(duì)雙足機(jī)器人的研究。
2018-07-12 11:06:216026 仿人雙足機(jī)器人是機(jī)器人研究的前沿領(lǐng)域,是多種科技的結(jié)合,代表一個(gè)國(guó)家的技術(shù)水平。仿人雙足機(jī)器人最大的特征就是雙足步行,因此它的靈活性很高,可以代替人類完成危險(xiǎn)作業(yè)。
2020-01-15 10:31:0020 雙足步行機(jī)器人是一種仿人機(jī)器人,是移動(dòng)式機(jī)器人領(lǐng)域中一類重要的仿生系統(tǒng)。雙足步行機(jī)器人作為一種移動(dòng)式機(jī)器人,它與輪式,履帶式機(jī)器人相比有許多優(yōu)點(diǎn)與優(yōu)越性。由于雙足步行機(jī)器人的行走具有獨(dú)特的適應(yīng)性
2020-04-01 17:10:0020 在國(guó)家863計(jì)劃支持下,國(guó)防科技大學(xué)機(jī)器人實(shí)驗(yàn)室于2003年研制出一臺(tái)新型仿人機(jī)器人;同時(shí)與合肥智能機(jī)械研究所合作,在該機(jī)器人腳掌上安裝了可檢測(cè)地面反力信息的集成五維力/力矩傳感器。本文通過對(duì)仿人機(jī)器人
2020-04-06 08:22:001170 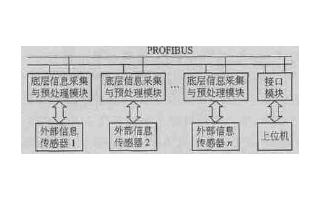
機(jī)器人控制系統(tǒng)的功能是接收來自傳感器的檢測(cè)信號(hào),根據(jù)操作任務(wù)的要求,驅(qū)動(dòng)機(jī)械臂中的各臺(tái)電動(dòng)機(jī)就像我們人的活動(dòng)需要依賴自身的感官一樣,機(jī)器人的運(yùn)動(dòng)控制離不開傳感器。
2020-08-18 18:21:456025 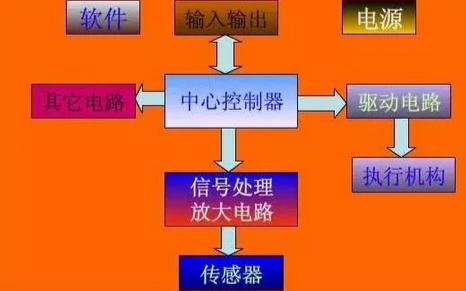
機(jī)器人控制系統(tǒng)的功能是接收來自傳感器的檢測(cè)信號(hào),根據(jù)操作任務(wù)的要求,驅(qū)動(dòng)機(jī)械臂中的各臺(tái)電動(dòng)機(jī)就像我們人的活動(dòng)需要依賴自身的感官一樣,機(jī)器人的運(yùn)動(dòng)控制離不開傳感器。
2021-03-10 14:57:325534 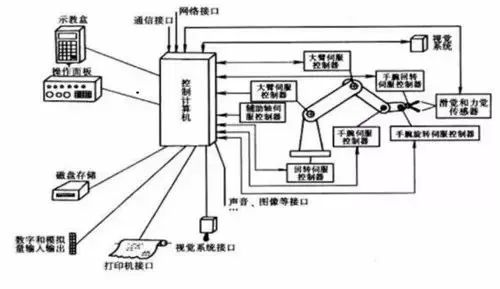
視覺是人類感知外界信息的重要手段,視覺伺服系統(tǒng)是機(jī)器人獲取環(huán)境信息的關(guān)鍵組成部分。本文主要討論仿人機(jī)器人BHR-1的視覺伺服系統(tǒng)。首先介紹機(jī)器人頭部的視覺總體結(jié)構(gòu)方案,然后論述了基于立體視覺的信息處理和頭部運(yùn)動(dòng)控制,最后通過目標(biāo)跟蹤和物體抓取實(shí)驗(yàn)說明了系統(tǒng)的可行性。
2021-04-13 12:00:373982 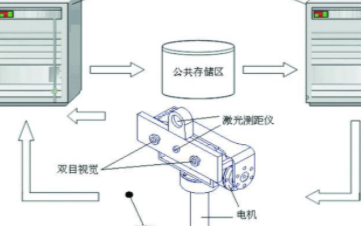
機(jī)器人研究是自動(dòng)化領(lǐng)域最復(fù)雜。最具挑戰(zhàn)性的課題,它集機(jī)械。電子。計(jì)算機(jī)。材料。傳感器。控制技術(shù)等多門學(xué)科于一體,是多學(xué)科高技術(shù)成果的集中體現(xiàn)。而仿人步行機(jī)器人技術(shù)的研究更是處于機(jī)器人課題研究的前沿
2021-04-13 13:58:482842 
視覺跟蹤的實(shí)時(shí)性是仿人機(jī)器人的重要性能要求之一。針對(duì)這一系統(tǒng)要求,近年來有很多學(xué)者設(shè)計(jì)出了多種系統(tǒng)結(jié)構(gòu)。文中作者設(shè)計(jì)了一種基于CAN總線的分布式的仿人機(jī)器人的控制系統(tǒng),其中的視覺系統(tǒng)通過無線局域網(wǎng)
2021-04-13 14:18:463970 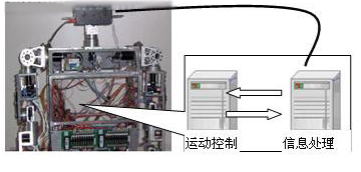
機(jī)器人控制系統(tǒng)的功能是接收來自傳感器的檢測(cè)信號(hào),根據(jù)操作任務(wù)的要求,驅(qū)動(dòng)機(jī)械臂中的各臺(tái)電動(dòng)機(jī)就像我們人的活動(dòng)需要依賴自身的感官一樣,機(jī)器人的運(yùn)動(dòng)控制離不開傳感器。
2022-03-18 10:26:266896 電子發(fā)燒友網(wǎng)站提供《一種基于CAN總線的單片機(jī)機(jī)床運(yùn)動(dòng)控制系統(tǒng)研究.pdf》資料免費(fèi)下載
2023-10-18 11:16:000 電子發(fā)燒友網(wǎng)站提供《基于SSVEP仿人機(jī)器人異步腦機(jī)接口控制系統(tǒng).pdf》資料免費(fèi)下載
2023-11-03 09:34:520 機(jī)器人控制系統(tǒng)是機(jī)器人技術(shù)的核心,它負(fù)責(zé)接收輸入信號(hào),處理信息,控制機(jī)器人的運(yùn)動(dòng)和執(zhí)行任務(wù)。一個(gè)完整的機(jī)器人控制系統(tǒng)通常由以下幾個(gè)部分組成: 傳感器系統(tǒng) 傳感器系統(tǒng)是機(jī)器人控制系統(tǒng)的重要組成部分,它
2024-06-16 15:14:573049 工業(yè)機(jī)器人控制系統(tǒng)是工業(yè)機(jī)器人的大腦,它負(fù)責(zé)接收輸入信號(hào)、處理信息、控制機(jī)器人的運(yùn)動(dòng)和執(zhí)行任務(wù)。一個(gè)完整的工業(yè)機(jī)器人控制系統(tǒng)通常包括以下幾個(gè)基本組成部分: 傳感器系統(tǒng) : 位置傳感器 :用于檢測(cè)
2024-06-16 15:26:534138 引言 機(jī)器人是一種具有高度自動(dòng)化和智能化的設(shè)備,它可以模擬人類的行為和思維,完成各種復(fù)雜的任務(wù)。機(jī)器人控制系統(tǒng)是機(jī)器人的重要組成部分,它負(fù)責(zé)接收傳感器的信號(hào),處理數(shù)據(jù),控制執(zhí)行器的運(yùn)動(dòng),實(shí)現(xiàn)機(jī)器人
2024-06-16 15:36:433201
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論