設計工具日漸成熟,如今將FPGA集成到常用的深度學習框架已成為可能。未來,FPGA將有效地適應深度學習的發展趨勢,從架構上確保相關應用和研究能夠自由實現。
2016-07-28 12:16:38 7665
7665 該原型由英特爾和地平線聯合開發完成,基于地平線最新設計的一款低功耗深度神經網絡處理器架構IP。分工上,英特爾提供了FPGA硬件平臺,地平線提供了實現在FPGA上的深度神經處理器架構,
2016-12-29 16:03:082709 有多種 3D 傳感器方案來實現深度感知系統,包括立體視覺相機、激光雷達和TOF(飛行時間)相機。每個選擇都有其優缺點,其中,嵌入式深度感知立體系統成本低,堅固耐用,適合戶外使用,并且能夠提供高分辨率的彩色點云。
2022-08-23 16:45:151871 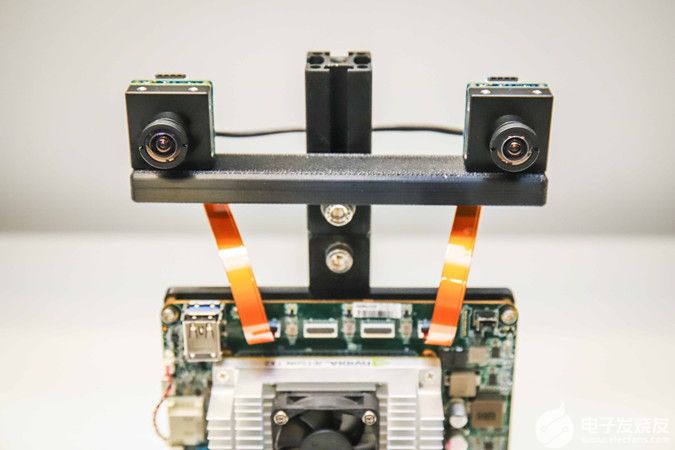
基于單攝像頭圖像來感知3D環境是一個病態問題,但是可以利用一些幾何約束和先驗知識來輔助完成這個任務,也可以采用深度神經網絡端對端的學習如何從圖像特征來預測3D信息。
2023-06-08 10:22:482425 
深度感知是實現 3D 測繪、物體識別、空間感知等高級認知功能的基礎技術。對于需要精確實時處理環境與物體的形狀、位置和運動的領域,這項技術不可或缺。通過深度感知技術,可以準確獲取目標物體的位置
2025-05-21 17:44:251148 
日立汽車系統公司表示,其已經將人工智能(AI)技術應用于立體攝像頭中,此類攝像頭專為汽車自動剎車功能而設計。
2019-05-09 09:26:151728 ,共同進步。
歡迎加入FPGA技術微信交流群14群!
交流問題(一)
Q:FPGA做深度學習能走多遠?現在用FPGA做深度學習加速成為一個熱門,深鑒科技,商湯,曠視科技等都有基于FPGA做深度學習的項目
2024-09-27 20:53:31
現場可編程門陣列 (FPGA) 解決了 GPU 在運行深度學習模型時面臨的許多問題
在過去的十年里,人工智能的再一次興起使顯卡行業受益匪淺。英偉達 (Nvidia) 和 AMD 等公司的股價也大幅
2024-03-21 15:19:45
以承擔機器人路徑規劃、環境感知、運動控制等任務,結合外部傳感器的反饋信息,實現高效、準確的機器人控制系統。
四、優勢總結
高并行性:FPGA的高并行性使其在處理大規模并行運算時具有顯著優勢,能夠顯著提高深度
2024-07-29 17:05:30
大蝦們,小蝦米求助!FPGA的最大深度可以達到多少,如果我存儲的數據由14000*29bit,又需高速處理的話,我是否應該考慮使用SDRAM?順便記錄下:當讀速率F2慢于寫速率F1時,FIFO便可
2013-05-28 14:17:37
公司名稱:北京感知起源科技有限公司公司介紹:是一家創業公司,是專注領域為小衛星成像雷達系統、射頻模塊、星載反射面天線、數字信號處理硬軟一體化系統、雷達信號回波模擬器、基于AI的目標識別與分類。所涉
2021-11-17 11:56:56
公司名稱:北京感知起源科技有限公司公司介紹:是一家創業公司,是專注領域為小衛星成像雷達系統、射頻模塊、星載反射面天線、數字信號處理硬軟一體化系統、雷達信號回波模擬器、基于AI的目標識別與分類。所涉
2021-11-29 17:36:49
CV:基于深度學習實現目標檢測之GUI界面產品設計并實現圖片識別、視頻識別、攝像頭識別
2018-12-21 10:31:47
你好,我有一個需要立體成像的項目。 realSense d435似乎是完美的,但不幸的是這個設備太寬了。是否有可能從深度模塊中撕掉兩個攝像頭并再次用電纜連接到該板?我知道,我必須再次校準d435
2018-11-16 11:31:04
。· 利用開發板上的MIPI CSI1和CSI2接口,完整接入8路攝像頭,實現了所有通道的視頻預覽與采集,為機器人構建了全方位的視覺感知系統。卓越性能表現:· CPU占用率:34%· DDR占用率:50
2025-10-29 16:41:20
。此外,FPGA正迅速取代ASIC和應用專用標準產品(ASSP)來實現固定功能邏輯。 FPGA市場規模預計在2016年將達到100億美元。對于深度學習而言,FPGA提供了優于傳統GPP加速能力的顯著潛力
2018-08-13 09:33:30
1.為什么使用cc2530ZigBee板來實現感知層?為什么不能直接使用單片機采集數據呢?因為單片機還連接了WiFi模塊。WiFi模塊會隨著時間的推移而發熱,如果直接用單片機和節點相連,則采集到
2022-01-17 08:13:19
FPGA實現。易于適應新的神經網絡結構深度學習是一個非常活躍的研究領域,每天都在設計新的 DNN。其中許多結合了現有的標準計算,但有些需要全新的計算方法。特別是在具有特殊結構的網絡難以在 GPU 上
2023-02-17 16:56:59
要想機器人有智能,必先賦予其感知能力。感知計算,特別是視覺以及深度學習,通常計算量比較大,對性能要求高。但是機器人受電池容量限制,可分配給計算的能源比較低。
2019-10-10 06:39:48
完成,基于地平線最新設計的一款低功耗深度神經網絡處理器架構IP。分工上,英特爾提供了FPGA硬件平臺,地平線提供了實現在FPGA上的深度神經處理器架構,深度神經網絡算法,以及整套嵌入式人工智能
2017-01-06 18:09:34
雙目立體視覺(BinocularStereoVision)是機器視覺的一種重要形式,因其可簡單地利用左右攝像機中的圖像信息計算得到相機視野中物體相對于攝像機的深度信息使得該技術擁有廣泛的應用前景
2021-12-23 07:19:52
大家好,我想弄清楚哪個相機(realsense D415或realsense D435)在陽光下具有最佳性能,可在2到5米范圍內進行深度感知和物體識別。我已經閱讀了規格,但似乎intel D415
2018-11-20 11:34:48
基于FPGA的小功率立體聲發射機的設計
2023-09-20 06:12:22
`現實的世界是一個擁有寬度、高度和深度的三維立體世界。在平面二維顯示技術已經成熟的今天,三維立體顯示技術首當其沖的成為了當今顯示技術領域的研究熱點。眾所周知人眼在接收被觀察物體的信息時,攜帶物體信息
2020-08-27 14:59:05
被迫寫此論文,卻一點思路都沒有,觀測矩陣怎么求的?又怎么重構?最重要的是怎么用FPGA來實現???求相關經驗大神提點,思路也可以
2016-11-08 09:19:47
數據進入FPGA的速率高于傳出的速率,持續的傳輸會造成數據的溢出,斷續的傳輸可能會造成數據不連續。使用基于LabVIEW FPGA的DMA FIFO作為主控計算機和FPGA之間的緩存,若DMAFIFO深度設置的合適,FIFO不會溢出和讀空,那么就能實現數據輸出FPGA是連續的。
2019-10-12 09:05:54
對于自主機器人導航和其它機器視覺應用來說,實時深度感知是很關鍵的。目前通過立體圖像來計算深度的算法計算量很大,例如差異測繪,要占用CPU大量的時間,或者需要用昂貴的器件進行實時操作。
2019-10-17 08:28:30
本文介紹一種基于視差原理的立體顯示器的視頻轉換系統,它能夠將已有的立體視頻格式轉換成所需的視頻格式。
2021-04-29 06:20:29
進入大腦,提供一種全新的體驗——使用者通過皮膚即可感受音樂。今年9月,幾位聾啞人參加了在拉斯維加速舉辦的一場音樂會,他們正是利用了Music:Not Impossible可穿戴技術設備,通過皮膚體驗音樂振動,感受到“環繞立體聲”,實現了親身“聽”到音樂會的夢想。
2019-07-19 04:20:02
最近要做一個采集coms攝像頭信號的東西在YUV格式只要Y信號就可以了我只會fpga了要是不用外加sdram難實現嗎?求大神指導額
2012-11-03 10:15:00
的信息,將感知系統的感知維度擴展以實現多維度(多模態)感知目標的完整信息。如下圖示例,芯片將攝像頭圖像數據,和雷達探測目標的距離、速度、散射截面R的感知數據,以及紅外傳感器探測的熱輻射圖像數據疊加
2024-04-11 10:26:51
圖像壓縮之后的數據存入fifo,然后經過nrf2401發送。。但是由于圖片尺寸比較大,導致fifo深度不夠,受限于FPGA芯片尺寸的限制,fifo深度不能再選大了。。。求指導
2015-05-22 14:34:48
隨著三維立體顯示電影阿凡達等的出現,三維立體顯示得到廣泛的關注,自由立體顯示系統作為最好實現真三維立體顯示的技術,對自由立體顯示的研究具有重要的作用,本文通過對自由立體顯示系統中人的因素分析以及自由立體顯示圖像制作分析,為了使人得到很好的三維立體感覺,進行了綜合的人機交互分析。
2020-03-26 06:42:23
fpga采集u***攝像頭怎么樣去實現
2014-12-16 17:52:29
嗨,我在邏輯中使用單端口RAM模塊,深度為208896,長度為12位。我想通過增加內存深度和字長來提高計算的精度。請讓我知道我的fpga的深度和寬度的兼容值。最大塊RAM存儲器的數據表是14,976 Kb。問候,Tanay
2019-10-31 10:21:53
自動駕駛汽車的夢想正在成為現實。通過在車輛中實現多種先進的駕駛員輔助系統(ADAS),汽車行業對于完全自動駕駛的追求正在穩步推進。如今,幾乎所有汽車經銷商的新款車都配備了多個攝像頭、雷達和超聲波傳感器,可實現如輔助自動泊車、自動緊急制動、車道輔助行駛、司機疲勞駕駛警報等基于感知的各項功能。
2019-07-29 08:26:19
自動駕駛汽車的夢想正在成為現實。通過在車輛中實現多個高級駕駛輔助系統(ADAS),汽車行業對自動駕駛的追求正在穩步推進。當今的新車均已配備多個攝像頭、雷達和超聲波傳感器,實現基于感知的輔助功能,如
2022-11-10 08:09:48
成像對于許多機器人應用至關重要,能讓機器人執行基本任務,躲避障礙物,進行導航以及確保基本安全。 顯然,提供成像的方式是采用低成本視頻攝像頭,或者再好點,使用兩個攝像頭實現立體視野和深度感知。 但后者
2020-11-27 06:20:37
,又可以作為機器學習、深度學習等各類算法的原始數據,從而為智能駕駛及艙內感知保駕護航。經緯恒潤緊跟智能汽車行業發展趨勢和市場需求,全面布局車載攝像頭產品,目前已形
2022-07-19 13:20:45
Intel RealSense?深度攝像頭D455Intel Realsense深度攝像頭D455采用立體聲攝像頭,可為各種用途提供出色的深度信息。立體聲攝像頭在室內和室外均能正常工作,因此非常適合
2024-02-27 11:51:25
經緯恒潤智能座艙系統級解決方案具備感知能力、呈現能力和處理能力,包含攝像頭模組、麥克風、活體檢測(毫米波雷達)、 氛圍燈、流媒體
2024-12-05 13:21:09
車載攝像頭是車輛感知物理世界的“眼睛”,是實現智能駕駛的核心感知傳感器。車載攝像頭通過鏡頭和圖像傳感器實現圖像信息的實時采集,用于
2024-12-05 15:54:49
為了解決基于LabVIEWFPGA模塊的DMAFIFO深度設定不當帶來的數據不連續問題,結合LabVIEWFPGA的編程特點和DMA FIFO的工作原理,提出了一種設定 FIFO 深度的方法。對FIFO不同深度的實驗表明,采
2011-09-26 13:45:177987 
三目立體視覺外極線校正及其FPGA實現方法
2016-09-17 07:30:24 16
16 介紹了基于FPGA,利用數字頻率合成技術實現的小功率立體聲 FM調頻發射機的設計.采用FPGA完成對核心芯片MC145152的控制,可自動改變并測量發射 頻率并用液晶顯示;同時實現了頻率擴展、自制
2016-10-25 18:04:4212 FPGA是深度學習的未來,學習資料,感興趣的可以看看。
2016-10-26 15:29:040 機器深度學習是近年來在人工智能領域的重大突破之一,它在語音識別、自然語言處理、計算機視覺等領域都取得了不少成功。由于車輛行駛環境復雜,當前感知技術在檢測與識別精度方面無法滿足自動駕駛發展需要,深度學習被證明在復雜環境感知方面有巨大優勢。
2016-11-02 17:12:046330 
科達感知型攝像機之人員卡口
2016-12-29 20:16:070 針對虛擬現實領域現有的顯示模塊無法提供滿足人眼視覺規律的立體視覺效果這一問題,提出一種基于斜交視錐體立體攝像機模型的虛擬現實(VR)立體視覺解決方案。首先,通過研究人眼視域模型和人眼雙目提取深度信息
2018-01-03 16:03:441 立體視覺的采集與顯示,定位為立體視覺的采集與顯示系統。另一方面,通過在FPGA片上設計的高速圖像處理系統,可以根據左右圖像的差距,計算出圖像的深度信息,也就是物體在環境中相對于雙目攝像頭的三維坐標。該設計方面可以應用到人機交互、機器視覺領域,作為機器對環境情況的認知設備。
2018-05-28 09:51:003590 依托自主研發的嵌入式主動/被動雙目立體視覺技術,人加已經推出雙目AI攝像頭產品——“司眸”系列,可以為各類機器人提供立體視覺感知解決方案,讓機器人擁有人體感知、自主避障等視覺智能,為下游客戶提供成熟、可量產的解決方案。
2018-06-07 14:44:086451 Pico Zense 是 Pico發布的一款高精度、高分辨度Time-of-Flight(TOF)深度感知解決方案,基于Rockchip RV1108,能實現手勢識別、人體定位與識別等功能,助力將3D視覺能力快速集成到產品中。
2018-06-22 15:20:176464 微軟在2016年開始將立體攝像頭集成至VR系統中以開發AR頭顯,允許用戶能夠通過攝像頭的饋送看到現實世界。通過視頻合成可以創建低成本的AR系統。
2018-11-06 10:42:381100 DeePhi Tech是面向無人機,機器人,監控攝像機和數據中心應用的FPGA深度學習平臺提供商.DeePhi平臺基于賽靈思所有可編程FPGA和SoC,提供靈活性,高性能,低延遲和低功耗
的理想組合。
2018-11-28 06:50:003427 Occipital的深度感知模塊Structure Sensor為iPhone和iPad提供了 HoloLens 般的深度感知能力。現在,這家公司的最新產品有望為安卓設備,AR/VR頭顯,及其他設備帶來同樣的功能。
2018-11-30 14:15:571715 為滿足物流分揀的低成本和實時性要求,提出了基于多個立體攝像頭的系統獲取典型物體的完整立體信息的方法,并結合機械臂搭建了實驗硬件平臺。實驗采用了2個微軟Kinect攝像頭在水平面上實現了約3 mm精度
2019-01-18 15:15:068 本文將概要討論利用模擬或HDMI攝像機實現立體視覺(3D視頻)的各種要求。文章將描述一個基于FPGA的系統,它將兩個視頻流結合成一個3D視頻流,通過HDMI 1.4發射器進行傳輸,同時還要介紹一個
2019-04-09 08:50:003563 本文從硬件加速的視角考察深度學習與FPGA,指出有哪些趨勢和創新使得這些技術相互匹配,并激發對FPGA如何幫助深度學習領域發展的探討。
2019-06-28 17:31:467493 像素提高到ZYDAS-2的每度14.2個像素。這進而提高了目標識別的探測距離,遠遠優于傳統立體攝像頭相對受限的3D測量距離。
2019-08-09 10:51:466535 實現PCB高精度深度銑的關鍵是每軸上裝置的光柵尺可感知板面,使各Z 軸的下降深度被單獨控制, 各軸間協調獨立作業,實現量產化加工。
2019-11-15 11:24:342663 提出采用CMOS數字攝像頭采集并提取黑色膠條位置來控制冷卻轉鼓速度的方法。系統以FPGA作為核心控制器,采用兩片SRAM進行乒乓操作,FPGA根據CMOS攝像頭輸出的同步信號,將采集到的圖像信息存儲
2021-02-01 14:54:0013 對圖像進行重取樣,使圖像的行列對齊。給出了基于FPGA的實時計算三目立體視覺外極線校正的硬件實現方法。在時鐘頻率為60 MHz,圖像可分辨的像素數為640×480時,三目立體視覺外極線校正速度達到48幀/s。
2021-04-01 10:27:2912 本文給出一種實時計算場景稠密深度圖的多目立體視覺機設計與實現方法。立體視覺機使用多個微型攝像機同步獲取場景圖像,采用圖像修正、LoG濾波、多立體圖像對匹配和稠密深度圖等并行算法,利用FPGA的大規模
2021-04-02 09:33:0021 實現了一種用于自由立體顯示系統的光學引擎。該系統采用FPGA作為控制處理器,通過RS232串口與DSP瞳孔跟蹤模塊實時
2021-04-23 14:54:542202 
,主要探討了三種主流的光學深度感知技術:雙目立體視覺、ToF(飛行時間)傳感器,和結構光傳感器。Dinesh Balasubramaniam 的演講主題為:僅有二維是不夠的--光學深度感知技術概述
2021-06-23 16:08:402301 當今汽車認知
自動駕駛汽車的夢想正在成為現實。通過在車輛中實現多個高級駕駛輔助系統(ADAS),汽車行業對自動駕駛的追求正在穩步推進。當今的新車均已配備多個攝像頭、雷達和超聲波傳感器,實現基于感知
2022-01-15 17:32:271213 深度信息恢復是計算機視覺領域的一個重要研究內容。使用傳統的光學成像系統對不同距離的物體成像時,需要機械移動會造成圖像放大率變化,導致深度測量產生誤差。近年來,電控調焦的液晶透鏡光學成像系統已實現對焦、變焦、深度測量等功能,利用液晶透鏡光學成像系統進行雙目立體視覺深度測量可以擴張雙目深度測量范圍。
2022-06-14 13:43:183691 在基于事件的攝像機的立體深度估計方面已經有了一些工作,但是,由于缺乏準確的地面實況深度,評估只限于小的、不相干的序列,包括攝像機前面的幾個物體。
2022-11-07 09:39:283032 Dear Reality?發布新品 EXOVERB,解鎖立體聲制作空間感知新緯度 Dear Reality?推出全新混響插件——EXOVERB,賦予立體聲制作前所未有的 3D 深度和廣度感知技術
2023-01-31 11:35:21492 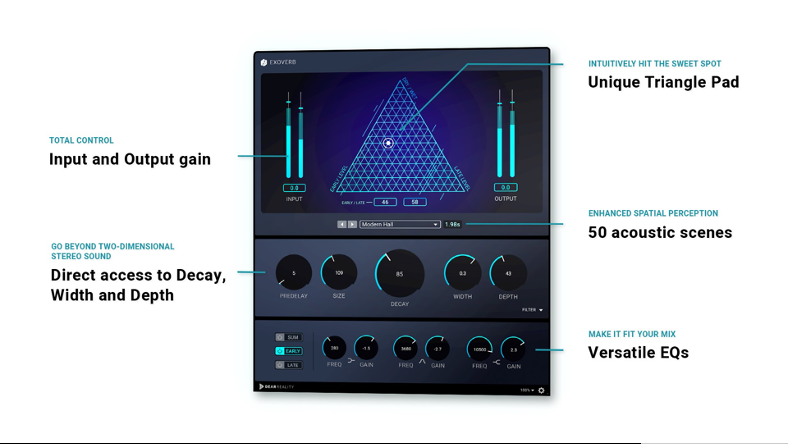
這是新的系列教程,在本教程中,我們將介紹使用 FPGA 實現深度學習的技術,深度學習是近年來人工智能領域的熱門話題。
2023-03-03 09:52:132330 這是新的系列教程,在本教程中,我們將介紹使用 FPGA 實現深度學習的技術,深度學習是近年來人工智能領域的熱門話題。
2023-04-12 10:19:341763 這是新的系列教程,在本教程中,我們將介紹使用 FPGA 實現深度學習的技術,深度學習是近年來人工智能領域的熱門話題。
2023-05-04 11:22:362150 
? ? 本文提出了一種生產化的端到端立體深度感知系統設計,可以完成預處理、在線立體校正和立體深度估計,并支持糾偏失敗后的單目深度估計備選方案。同時,該深度感知系統的輸出應用于一種基于智能眼鏡拍攝
2023-05-26 16:12:001351 
在自動駕駛體系中,毫米波雷達是系統感知層不可或缺的重要硬件,能讓智能駕駛感知系統立體化。因為汽車自動駕駛系統的主要邏輯層包括感知層、決策層和執行層,而感知層是實現系統運作的源頭基礎。
2023-06-01 16:56:291810 
電子發燒友網站提供《邊緣AI套件上的立體視覺深度感知.zip》資料免費下載
2023-06-12 14:36:400 我的論文方向目前是使用單目攝像頭實現機器人對人的跟隨,首先單目攝像頭與kinect等深度攝像頭最大的區別是無法有效獲取深度信息,那就首先從這方面入手,嘗試通過圖像獲取攝像頭與人的距離。
2023-07-03 10:01:474170 
在本文中,我們首先介紹了立體視覺系統的主要部分,并提供了有關使用硬件組成和開源軟件制作定制立體相機的說明。由于此設置專注于嵌入式系統,因此它將實時計算任何場景的深度圖,而無需電腦主機。
2023-07-13 16:49:171233 
兩個范疇。 在稠密算法范疇,主要通過點云轉換、多視圖立體視覺等方法,來獲取場景中每一個點的深度信息,從而更準確地描述場景中的物體。其中最具代表性的就是近兩年非常火熱的BEV感知,其多傳感器數據從圖像空間到BEV空間的轉換過程
2023-10-17 09:53:201906 在人工智能和圖像處理的迷人世界中,這些概念在使機器能夠像我們的眼睛一樣感知我們周圍的三維世界中起著關鍵作用。和我們一起探索立體視覺和深度感知背后的技術,揭示計算機如何從二維圖像中獲得深度、距離和空間理解的秘密。
2023-11-21 10:50:451463 FPGA(現場可編程門陣列)加速深度學習模型是當前硬件加速領域的一個熱門研究方向。以下是一些FPGA加速深度學習模型的案例: 一、基于FPGA的AlexNet卷積運算加速 項目名稱
2024-10-25 09:22:031856 航空建筑深度估計是三維數字城市重建中的一項重要任務,基于深度學習的多視圖立體(MVS)方法在該領域取得了較好的成果。目前的主要方法通過修改MVS 框架實現建筑物的深度估計,缺乏對建筑物內在結構的考慮,易導致精度不足等問題。
2024-11-07 10:16:041443 
深度感知對倉庫機器人應用至關重要,尤其是在自主導航、物品拾取與放置、庫存管理等方面。通過將深度感知與各種類型的3D數據(如體積數據、點云、紋理等)相結合,倉庫機器人可以在錯綜復雜環境中實現自主
2024-11-09 01:09:071110 
近年來,3D 感知技術越來越多地應用于各行各業,尤其是工業自動化、機器人、自動駕駛、醫療保健、AR/VR 和安全領域。3D 感知是用于捕捉環境與物體三維形狀并進行數字化處理的技術的統稱,而深度感知在其中起著關鍵作用。
2025-05-15 17:17:01999 ,成本低廉,技術成熟。然而攝像頭作為被動傳感器,依賴環境光照,在夜間或惡劣天氣下性能下降,且單目攝像頭無法直接獲得深度信息(需要額外假設或立體視差),典型單目在20米外測距精度迅速下降,立體攝像頭在80米之外精度也
2025-06-20 09:14:07562 
上一篇我們引用馬斯克對于智駕感知的觀點,以及分享了LiDAR與雙目立體視覺的原理技術知識,下面我們詳細介紹一下立體視覺相對于LiDAR的性能優勢。
2025-11-11 10:58:491664 
源自:網絡 車載雙目攝像頭(也稱立體視覺攝像頭,Stereo Camera)模仿人眼的視覺機制,通過兩個略有間距的攝像頭同時拍攝同一場景,比較兩幅圖像之間的差異,從而計算出深度信息。 與單目攝像頭只能識別形狀、顏色,或依賴學習來估
2025-11-13 09:17:231135 
[首發于智駕最前沿微信公眾號]自動駕駛的純視覺方案中,單目攝像頭因無法直接感知深度,在環境理解上存在根本局限,雙目視覺技術在此需求下應運而生。它通過模擬人眼,利用雙攝像頭的視差來推算距離,將二維圖像
2025-12-31 09:45:50288 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論