據麥姆斯咨詢報道,物聯網及雙目視覺專家鉅芯發布了一款智能雙目立體視覺系統,以及業內首顆智能雙目立體視覺芯片eagleye100。
2017-10-26 10:26:21 11058
11058 深度估算是自動駕駛領域的一項關鍵技術。作為自動駕駛中最常用的傳感器,攝像頭能夠獲取全面、豐富又密集的信息。基于立體視覺的深度估算技術可以準確識別和定位運動與靜止目標以及路面對象。
2022-06-10 10:37:425711 雙目立體視覺中常用的基于區域的局部匹配準則主要有圖像序列中對應像素差的絕對值之和SAD(sum of absolute differences)、對應像素差的平方之和SSD(sum of squared differences)及半全局匹配算法SGM(semi—global matching)。
2023-07-01 09:34:023304 
由大聯大世平推出的基于NXP S32V234雙目立體視覺解決方案,可顯著提高物體識別率以及識別種類,從而進一步完善ADAS領域的相關應用。
2021-05-18 14:13:291569 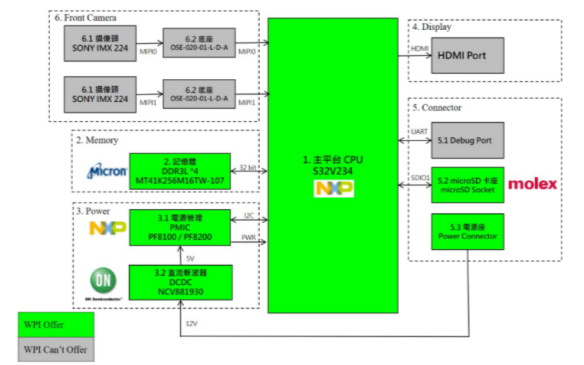
雙目攝像頭可以計算長度,那么他可以計算出高度或者對障礙物的距離嗎?還有他是怎么計算長度的,有沒有公式
2023-09-28 06:55:56
`雙目立體視覺原理大揭秘(一)——雙目視覺導航、定位;雙目立體視覺是一門有著廣闊應用前景的學科,根據雙目立體視覺CCAS提供的思路及組成原理,隨著光學、電子學以及計算機技術的發展,將不斷進步,逐漸
2013-11-21 16:20:51
`雙目立體視覺原理大揭秘(二)——三維重構雙目立體視覺是一門有著廣闊應用前景的學科,根據雙目立體視覺CCAS提供的思路及組成原理,隨著光學、電子學以及計算機技術的發展,將不斷進步,逐漸實用化,不僅
2013-11-21 16:22:03
雙目立體視覺(BinocularStereoVision)是機器視覺的一種重要形式,因其可簡單地利用左右攝像機中的圖像信息計算得到相機視野中物體相對于攝像機的深度信息使得該技術擁有廣泛的應用前景
2021-12-23 07:19:52
高速相機對目標位進行攝像,充當人的雙眼的功能,然后通過系統軟件處理,可以確定任意物體的三維輪廓,還可以得到輪廓上任意點的三維坐標。基于雙目立體視覺這種強大的技術功能,不但在軍事科研上有所運用,如航天遙測
2016-03-03 09:36:59
本章將介紹計算機視覺中最核心傳感器-攝像頭的基本使用,主要講解了CSI攝像頭,USB攝像頭,網絡攝像頭的基本使用。
2020-11-06 06:47:57
本帖最后由 埥茬適里瀭叺妏牸 于 2018-5-30 09:09 編輯
視覺——打開USB攝像頭,之前有朋友說,版本太高,打不開,現在上傳一份2012版本的。
2018-05-23 14:29:30
ATK-OV2640攝像頭模塊 MODULE_100X180MM 70~370mA
2023-03-28 13:05:53
最近在做一個雙目立體視覺項目,LABVIEW有模塊嗎,有哪位大神用LABVIEW做過
2018-01-13 19:44:32
://mp.weixin.qq.com/s/kcecV6PNE92FB8ugSoV4tw雙目立體視覺系統使用兩只相機同步采集圖像,通過像素匹配獲得深度圖像,進而獲取三維點云,系統結構如下。用下圖來解釋雙目視覺的基本原理:圖中所示變量為
2020-03-02 17:03:12
MT9V034攝像頭模塊 MODULE_27.5X31.5MM 44.5mA
2023-03-28 13:06:39
OV5640雙目攝像頭模塊 MODULE_59X40MM 270mA 3.3V
2023-03-28 13:06:39
OV5640攝像頭模塊 MODULE_24X32MM 75mA 3.3V
2023-03-28 13:06:39
OV7670攝像頭模塊是如何實現攝像頭畫面上傳到onenet的?
2021-09-30 08:53:23
RK3288接雙目攝像頭怎么操作?
2022-03-03 07:31:16
問題描述及復現步驟:請問,AIO-3568J的板子,配套mipi攝像頭為CAM-2MS2MF 雙目攝像頭模組,采用雙目攝像頭模組的Ubuntu系統固件刷機,都不能正常驅動攝像頭,這是怎么回事?
2022-08-25 16:58:27
WIFI攝像頭模塊 MODULE_29X23MM 300mA 3.3~24V
2023-03-28 13:06:38
請教大神,我有一個u***攝像頭(也可買直接視頻輸出的那種攝像頭),有線連接也想過,想把它改成可以實時監控水下魚情的無線攝像頭(有線的挑手機型號,很多手機不能用。)攝像頭通過u***連線連接水面的有
2018-01-31 23:26:08
距離感,目前的單目視覺系統得到的景深只是一個比例值,這是因為,雙面視覺系統的兩個攝像頭的距離是已知的。另外雙面使用的是塊的特制匹配可以生成致密的景深圖,而單目使用是兩張圖的特征點計算出距離比例,獲得
2017-09-17 17:56:27
項目名稱:基于雙目攝像頭的視覺景深算法開發試用計劃:1.在這個試用活動剛開始的時候我就申請了,但是很遺憾沒有通過。由于工作的原因我在今年開發了一套本來打算用于VR設備設備的雙目手勢識別硬件
2017-08-21 12:42:45
內核, 主頻可達1GHz, 可大大提高視覺處理的效率項目描述:該項目是五子棋機器人研發的一部分, 通過雙目攝像頭檢測出五子棋的位置, 測算出其全場坐標, 然后移動過去抓取棋子
2015-08-09 07:48:55
申請理由:1、使用路由芯片天生的優勢進行無線傳輸;2、使用無線路由芯片的基本性能進行多目攝像頭視頻/圖像采集;3、嘗試使用開源openWRT開源平臺加快開發進度,并驗證其性能;項目描述:采集雙目
2015-09-10 11:26:04
`收到開發版了解相關資料后,針對寵物機器人項目對尚安森美u***雙目攝像頭模組和本寵物機器人項目的相關功能進行PC端功能測試和開發試用。本項目本次測試是采用python配合openvc以及
2020-10-20 00:16:33
`本人對人臉識別技術非常感興趣,這次剛好看到了感光芯片雙目攝像頭的試用申請,果斷下手,并且非常榮幸獲得了測評的機會。我主要想要通過該款模組實現校園的人臉識別打卡,應用場景也包括進出校人員的自動識別
2020-08-28 19:01:20
本人對人臉識別技術非常感興趣,這次剛好看到有機會可以申請感光芯片USB雙目攝像頭的評測,于是果斷下手報名參加,非常榮幸獲得了測評的機會。我主要想通過這款雙目攝像頭模組開發一套校園人臉識別的簽到打卡
2020-08-28 19:34:56
`本人對人臉識別技術非常感興趣,這次剛好看到有機會可以申請感光芯片USB雙目攝像頭的評測,于是果斷下手報名參加,非常榮幸獲得了測評的機會。我主要想通過這款雙目攝像頭模組開發一套校園人臉識別的簽到打卡
2020-08-28 19:44:52
`本人對人臉識別技術非常感興趣,這次剛好看到有機會可以申請感光芯片USB雙目攝像頭的評測,于是果斷下手報名參加,非常榮幸獲得了測評的機會。我主要想通過這款雙目攝像頭模組開發一套校園人臉識別的簽到打卡
2020-08-28 19:57:39
。因為光照的不同會對識別的效果產生質的影響。因為目前的視覺系統只是認為識別到的是一個多通道的平面圖像,而再此基礎上做出了圖像的處理(濾波,灰度等)從目前的效果來看,這款雙目攝像頭在正常光和無光的情況下表現都十分中規中舉,所以下面我們將進入到 基于Qt框架的圖像識別技術。
2020-09-26 21:54:29
`之前一直對雙目攝像頭抱有很大的興趣,特別是看到朋友公司開發的帶人眼追蹤的裸眼3D顯示系統。當然他們使用的是intel的Intel RealSense D415/D435/D435i系列,這次剛好
2020-08-24 14:56:06
進行開箱的介紹該攝像頭模塊采用兩個200W像素的攝像頭組成。而左右兩側的Led 則是為補光而設定正面和背面的照片,而是比較充分的利用了pcb的空間,而雙目攝像頭一般為對稱攝像頭設計,可以模擬人眼看
2020-09-02 09:52:23
`發帖人:tobot我們知道樹莓派是當前最火的開發板(之一都可以去掉),不能不說那攝像頭接在樹莓派上做一評測,當然了我這里的攝像頭的確有點小問題(其中一個沒圖像)但不影響我連上了看看,單獨接任意一個
2020-09-23 11:58:54
輔助手段,比如lx530激光測距模塊(我手上正好有),識別真人(立體)和照片(平面)還是有可能的。這個項目估計比較花時間,預計在神經棒試用完成后(9月初)開始。3、在本次參加試用的攝像頭模組是雙目攝像頭
2020-08-10 18:02:48
項目名稱:敏感人群自動追蹤系統試用計劃:申請理由本人對人工智能視覺識別技術比較熟悉,對openvino、TensorFlow、python、C++等比較熟悉。想用這個雙目攝像頭模組
2020-08-10 18:02:40
本文將探討機器視覺應用的 CMOS 圖像感應器技術及架構要求。此外,還將詳細分析機器視覺的基本組件,攝像頭為滿足應用需求需要哪些條件,以及如何設計出可滿足各種機器視覺應用需求、同時又能在圖像質量
2019-07-19 04:30:00
【視頻教程】紫光同創盤古50K開發板&雙目攝像頭操作演示@小眼睛FPGA盤古系列開發板~
2023-06-12 11:23:45
,快速、精確的獲得被測對象的全場位移應變信息,在各個研究領域得到了廣泛應用。 立體視覺是由多幅圖像獲取物體三維幾何信息的方法。雙目立體視覺利用兩臺不同位置的攝像機同時拍攝,或由一臺相機變換位置后分時拍攝以
2015-09-21 10:11:12
您好: 我用的ROC3568雙目攝像頭,如何修改幀率為30呢?多謝!
2022-06-21 09:20:04
已生成兩種視頻源的 sbit,大家可直接下載,觀察實驗現象。步驟 3:連接HDMI 顯示器、Double_OV5640 雙目攝像頭,將sbit 下載到開發板中,實驗現象如下:LED 指示:更多實驗教程敬請關注!
2023-04-18 16:45:09
怎樣去設置RK3288 android 8.1的雙目攝像頭的功能呢?
2022-03-03 09:45:52
。 此計算將按每個像素進行,結果將用于產生三維圖像數據的點圖。與其它 3D 成像方法相比,如使用兩個攝像頭產生立體視覺或將結構化光圖案投射到場景上并測量失真方式,TOF 技術在物理緊湊性、響應
2017-04-12 14:44:45
有什么方法可以將雙目攝像頭結合OpenCV一起使用嗎?
2022-03-02 09:52:05
開發板硬件使用手冊”及原理圖)
二、Double_OV5640 雙目攝像頭簡介:
Double_OV5640雙目攝像頭模組采用美國OmniVision(豪威)CMOS芯片圖像傳感器OV5640
2023-06-13 16:01:09
的模型及工作空間代碼,方便用戶下一步開發。特征捕捉部分隨著最終用戶的使用方面不同,不能一概而論,所以需要用戶自己去實現。但在這方面,維視雙目立體視覺產品也提供了貼心的支持,從圖像預處理算法,到豐富的行業
2016-01-19 16:59:12
本文提出了一種雙目立體視覺的幾何解法,通過分別獲取場景中某物體在左右攝像機中投影點的實際像素坐標,利用標定得到的攝像機內參數,求得投影點的理想圖像坐標。然后
2009-12-30 17:01:19 14
14 機器視覺應用的攝像頭設計
摘要:本文將探討機器視覺應用的 CMOS 圖像感應器技術及架構要求。此外,還將詳細分析機器視覺的基本組件,攝像頭為滿足應用需求需
2010-01-04 15:46:182090 
0 引言 雙目立體視覺測量是基于視差原理,由多幅圖像獲取物體三維幾何信息的方法。在計算機視覺系統中,雙目立體視覺測量一般由雙攝像機從不
2010-09-26 17:07:031805 
雙目立體視覺的研究一直是機器視覺中的熱點和難點。使用雙目立體視覺系統可以確定任意物體的三維輪廓,并且可以得到輪廓上任意點的三維坐標。因此雙目立體視覺系統可以應用在
2011-04-08 17:51:29130 根據雙目立體視覺傳感器三角立體視差模型,建立了結構參數誤差的傳遞函數,分析了雙目視覺傳感器結構參數及其誤差傳遞規律對傳感器綜合測量精度的影響,得出了結構參數的合理
2011-09-06 14:38:4075 介紹了雙目立體視覺在光電子器件自動對接系統中的應用。該系統以線性成像模型為基礎建立了雙目立體視覺系統的數學模型,介紹了視覺系統標定的實現,包括標定點提取、特征點定
2011-10-11 15:15:4263 攝像機標定是機器視覺和攝像測量領域相對基礎的工作,同時也是最復雜、困難的T作。攝像機標定的意義是得到立體空間中對象的幾何信息,其中所使用的圖像信息由雙目攝像機所得。定后的雙目攝像機得到的圖像目標信息
2017-11-06 14:41:0530 視覺是通過三維世界所感知的二維圖像來研究和提取出三維景物世界的物理結構。所謂的立體視覺,是基于人眼視差的原理,由不同位置的兩臺或多臺攝像機對同一物體進行拍攝,然后通過對同一物體不同圖像中的視差,計算出物體在
2017-11-08 16:20:3418 立體視覺是計算機視覺領域的一個重要課題,它的目的在于重構場景的三維幾何信息。立體視覺的研究具有重要的應用價值,其應用包括移動機器人的自主導航系統,航空及遙感測量,工業自動化系統等。立體視覺是計算機
2017-11-17 10:09:025975 針對虛擬現實領域現有的顯示模塊無法提供滿足人眼視覺規律的立體視覺效果這一問題,提出一種基于斜交視錐體立體攝像機模型的虛擬現實(VR)立體視覺解決方案。首先,通過研究人眼視域模型和人眼雙目提取深度信息
2018-01-03 16:03:441 針對國內外橋梁裂縫測量效率低、成本高、精度低等現狀,提出了一種基于雙目立體視覺技術的橋梁裂縫測量系統。采用相機標定、圖像匹配、三維坐標計算等雙目立體視覺技術對橋梁裂縫的寬度和長度進行計算,實現了橋梁
2018-01-16 14:59:590 隨著自動化程度越來越高,機器視覺扮演著越來越重要的角色,傳統的2D定位無法解決產品的空間坐標信息,而3D雙目立體視覺可提供較高精度的定位。
2018-02-02 10:54:4917724 雙目立體視覺是機器視覺的一種重要形式,它是基于視差原理并由多幅圖像獲取物體三維幾何信息的方法。雙目立體視覺系統一般由雙攝像機從不同角度同時獲得被測物的兩幅數字圖像,或由單攝像機在不同時刻從不同角度
2018-02-08 14:46:2453938 雙目立體視覺是基于視差,由三角法原理進行三維信息的獲取,即由兩個攝像機的圖像平面和北側物體之間構成一個三角形。一直兩個攝像機之間的位置關系,便可以獲得兩攝像機公共視場內物體的三維尺寸及空間物體特征點的三維坐標。所以,雙目視覺系統一般由兩個攝像機構成。
2018-04-11 14:32:5525361 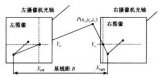
依托自主研發的嵌入式主動/被動雙目立體視覺技術,人加已經推出雙目AI攝像頭產品——“司眸”系列,可以為各類機器人提供立體視覺感知解決方案,讓機器人擁有人體感知、自主避障等視覺智能,為下游客戶提供成熟、可量產的解決方案。
2018-06-07 14:44:086451 以上皆是小覓雙目攝像頭系列產品面世以來備受行業青睞的重要原因。“此外,每一臺小覓雙目攝像頭,都通過富士康實驗室的高溫高濕持續工作、低溫動態老化、整機正弦振動等十幾項可靠性測試,具有極強的工控性能
2018-08-17 14:31:487737 本屆WRC,MYNTAI小覓智能首次以視覺識別技術軟硬件解決方案提供商的身份參展,會上同時展出了小覓雙目攝像頭標準版(MYNT EYE Standard)和小覓雙目攝像頭深度版beta兩款深度相機(以下簡稱S版和D版)。
2018-08-29 15:51:287663 雙目立體視覺測量是基于視差原理,由多幅圖像獲取物體三維幾何信息的方法。在計算機視覺系統中,雙目立體視覺測量一般由雙攝像機從不同的角度同時獲取周圍景物的兩幅圖像,或有單攝像機在不同時刻從不同角度獲取周圍景物的兩幅數字圖像,并基于視差原理即可恢復出物體的三維幾何模型,重建周圍景物的三維形狀與位置。
2018-12-29 08:50:005767 智能雙目立體視覺芯片模擬人的“雙眼”,給車輛加上一雙“眼睛”,將二維成像變為三維成像。
2018-10-08 15:31:128423 微軟在2016年開始將立體攝像頭集成至VR系統中以開發AR頭顯,允許用戶能夠通過攝像頭的饋送看到現實世界。通過視頻合成可以創建低成本的AR系統。
2018-11-06 10:42:381102 雙目活體人臉識別攝像頭采用近紅外補光技術,能實時精確捕捉活體人臉特征,有效防止將圖片、屏幕視頻等誤認為真人活體。
2019-01-13 09:50:2822543 目前的深度相機根據其工作原理可以分為三種:TOF相機、雙相機立體視覺、結構光投射立體視覺。
2019-05-14 09:04:588826 雙目立體視覺測量是人類利用雙眼獲取環境三維信息的主要途徑。隨著計算機視覺理論的發展,雙目立體視覺測量在工業測量中發揮了越來越重要的作用,具有廣泛的適用性。 本論文的主要研究內容是基于雙目立體視覺
2019-11-26 12:05:396 利用幾何成像原理建立起CCD雙目立體視覺測量系統的數學模型,從提高系統測量精度出發,在理論上重點對系統結構參數、圖像識別誤差與系統測量精度的關系進行了深入的分析和探討,并通過實驗對結論進行了驗證。研究內容對實際建立該測量系統具有很強的指導作用。
2020-03-30 13:52:065 雙目立體視覺技術具有成本低、適用性廣的優點,在物體識別、目標檢測等方面應用廣泛,成為計算機視覺領域的研究熱點。立體匹配是雙目立體視覺技術中的核心算法,對實現物體三維重建具有重要作用。在分析局部、全局
2021-04-12 09:47:543 前言 雙目立體視覺,由兩個攝像頭組成,像人的眼睛能看到三維的物體,獲取物體長度、寬度信息,和深度的信息;單目視覺獲取二維的物體信息,即長度、寬度。 1)雙目攝像頭 常見的雙目攝像頭有以下幾款: 能看
2021-04-26 14:19:4311541 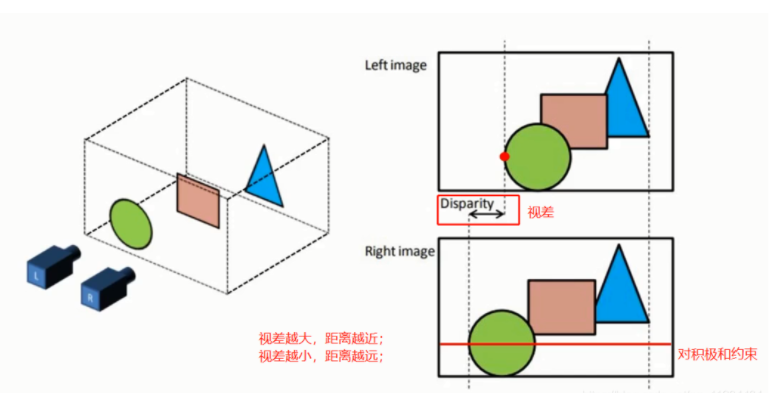
雙目視覺技術的原理、結構、特點、發展現狀和發展方向分析 雙目立體視覺是機器視覺的一種重要形式,它是基于視差原理并由多幅圖像獲取物體三維幾何信息的方法。 雙目立體視覺系統一般由雙攝像機從不同角度同時
2021-06-01 16:36:563350 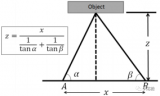
面向雙目立體視覺的迭代式局部顏色校正方法
2021-06-21 14:42:045 深度估算是自動駕駛領域的一項關鍵技術。作為自動駕駛中最常用的傳感器,攝像頭能夠獲取全面、豐富又密集的信息。基于立體視覺的深度估算技術可以準確識別和定位運動與靜止目標以及路面對象。
2022-06-01 09:36:133218 深度信息恢復是計算機視覺領域的一個重要研究內容。使用傳統的光學成像系統對不同距離的物體成像時,需要機械移動會造成圖像放大率變化,導致深度測量產生誤差。近年來,電控調焦的液晶透鏡光學成像系統已實現對焦、變焦、深度測量等功能,利用液晶透鏡光學成像系統進行雙目立體視覺深度測量可以擴張雙目深度測量范圍。
2022-06-14 13:43:183695 華為nova10 Pro擁有全新雙目立體視覺影像系統 業界首發前置人像特寫鏡頭 ? ? ? ? ? 審核編輯:彭靜
2022-07-05 14:57:291799 
總結一下,我們現在認識了三種制造立體視覺的方法,分別是視覺陷阱、全息投影和產生視差。 雙目立體視覺這一有著廣闊應用前景的學科,隨著光學,電子學以及計算機技術的發展,將不斷進步,逐漸實用化,不僅將成
2022-10-31 15:20:414858 電子發燒友網站提供《Netduino上的立體視覺.zip》資料免費下載
2022-11-08 11:57:320 簡單來說,基于雙目立體視覺的測距類似人類的雙眼,和基于TOF、結構光原理的測距不同,它不對外主動投射光源,完全依靠拍攝的兩張圖片( RGB 或者灰度圖)來計算距離。
2022-11-18 14:21:289773 由于兩個鏡頭共用一個設備ID,打開攝像頭時使用cv2.VideoCapture()函數,只需打開一次。區別有的雙目攝像頭是左右鏡頭各用一個設備ID,需要打開兩次cv2.VideoCapture(0),cv2.VideoCapture(1)。
2023-06-01 14:54:242189 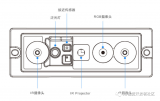
采用立體視覺,不需要紅外傳感器、聲波定位儀、激光雷達等測距傳感器,可大大降低了技術解決方案的成本。
2023-07-19 12:41:181253 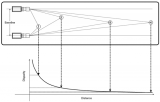
立體視覺技術是機器人技術研究中最為活躍的一個分支,是智能機器人的重要標志。雙目立體視覺是通過對同一目標的兩幅圖像提取、識別、匹配和解釋,進行三維環境信息的重建。其過程主要包括視頻捕獲、攝像機定標
2023-07-19 14:18:242 雙目更多的是基于物理測量,而單目視覺則是基于邏輯推理,通過大量的數據訓練,先識別出目標,再根據目標的大小和高度估算距離。因此,單目視覺的漏檢率高于雙目立體視覺,因為客觀上存在corner case。
2023-08-17 09:40:066046 
雙目立體視覺一直是機器視覺研究領域的發展熱點和難點,“熱”是因為雙目立體視覺有著及其廣闊的應用前景,且隨著光學、計算機科學等學科的不斷發展
2023-08-25 17:28:333274 
的距離傳感解決方案,盡管性能存在顯著差異,特別是在惡劣的天氣和道路條件下。 Nodar是AV先進立體視覺技術的提供商,最近進行了一系列面對面的性能測試,以比較 LiDAR 和立體視覺攝像頭如何處理低光,黑暗和惡劣天氣條件,以及檢測道路上的
2023-10-13 15:33:251178 全志V853開發板雙目攝像頭模組原理圖20220624
2022-10-19 15:11:2826 兩種高效的距離傳感解決方案,盡管性能存在顯著差異,尤其是在惡劣天氣和道路條件下。 Nodar是一家為自動駕駛汽車提供先進立體視覺技術的供應商,最近進行了一系列頭對頭的性能測試,以比較LiDAR和立體視覺攝像頭如何處理弱光、黑暗和惡劣的天氣條件
2023-11-07 17:01:581948 在智能駕駛技術飛速發展的當下,雙目立體視覺憑借其獨特的感知優勢,在 360 環視產品方案以及各類輔助駕駛功能中發揮著關鍵作用,在最新法規要求與復雜場景下表現突出,為汽車在AEB、NOA、自動泊車等核心場景中重構了安全與效率的邊界。
2025-09-23 11:35:47989 上一篇我們引用馬斯克對于智駕感知的觀點,以及分享了LiDAR與雙目立體視覺的原理技術知識,下面我們詳細介紹一下立體視覺相對于LiDAR的性能優勢。
2025-11-11 10:58:491676 
源自:網絡 車載雙目攝像頭(也稱立體視覺攝像頭,Stereo Camera)模仿人眼的視覺機制,通過兩個略有間距的攝像頭同時拍攝同一場景,比較兩幅圖像之間的差異,從而計算出深度信息。 與單目攝像頭只能識別形狀、顏色,或依賴學習來估
2025-11-13 09:17:231144 
[首發于智駕最前沿微信公眾號]在自動駕駛領域,純視覺方案一直受到不少人的認可。雙目攝像頭由于模擬了人眼的工作方式,能夠通過視差計算還原三維信息,在距離判斷和空間感知上具有天然優勢,因此被廣泛應用于純
2025-12-09 08:59:31747 
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論