
四足機(jī)器人周期函數(shù)效果演示
這里簡(jiǎn)單利用一個(gè)線(xiàn)性函數(shù)進(jìn)行演示 取a=1,b=1,其圖像隨時(shí)間變化如下: 利用周期函數(shù)對(duì)時(shí)間進(jìn)行調(diào)....
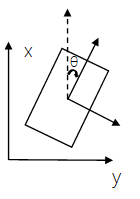
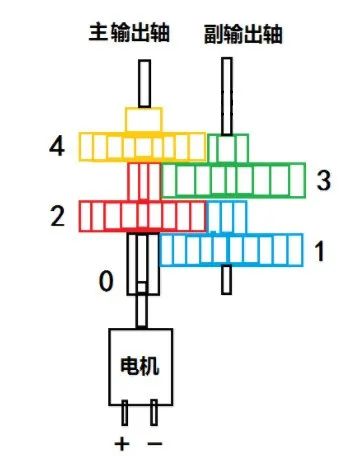
四足機(jī)器人步態(tài)規(guī)劃與接觸狀態(tài)
0、步態(tài)規(guī)劃 四足機(jī)器人控制當(dāng)中,步態(tài)是至關(guān)重要的一項(xiàng)。我們可以簡(jiǎn)單理解成四足機(jī)器人運(yùn)動(dòng)過(guò)程中各腿的....

機(jī)器人自主導(dǎo)航控制指令的下發(fā)與接收
1.通信協(xié)議 控制指令格式(15字節(jié)) 2.ROS端 在ROS端,首先需要接收從其他節(jié)點(diǎn)的控制消息,....

機(jī)器人里程計(jì)數(shù)據(jù)可視化
STM32端返回的x軸線(xiàn)速度、y軸線(xiàn)速度是相對(duì)于自身的機(jī)體坐標(biāo)系的速度,而機(jī)器人的位置信息是相對(duì)于世....
機(jī)器人里程計(jì)數(shù)據(jù)的上傳與接收
1.通信協(xié)議 里程計(jì)數(shù)據(jù)格式(19字節(jié)) 2.STM32端 /** * @brief 發(fā)送里程計(jì)數(shù)據(jù)....

ROS與移動(dòng)底盤(pán)的通信試驗(yàn)內(nèi)容
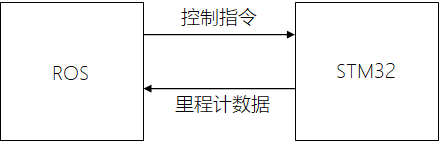
ROS與STM32的通信流程如圖所示 主要包含兩個(gè)方面: 小車(chē)?yán)锍逃?jì)數(shù)據(jù)的上傳與接收 控制指令的下發(fā)....
電機(jī)驅(qū)動(dòng)器有哪幾種
驅(qū)動(dòng)器有哪些? 2.1 有刷電機(jī)驅(qū)動(dòng)器 直流有刷電機(jī)的驅(qū)動(dòng)方法其實(shí)本質(zhì)上是使用 H 橋電路進(jìn)行驅(qū)動(dòng),....
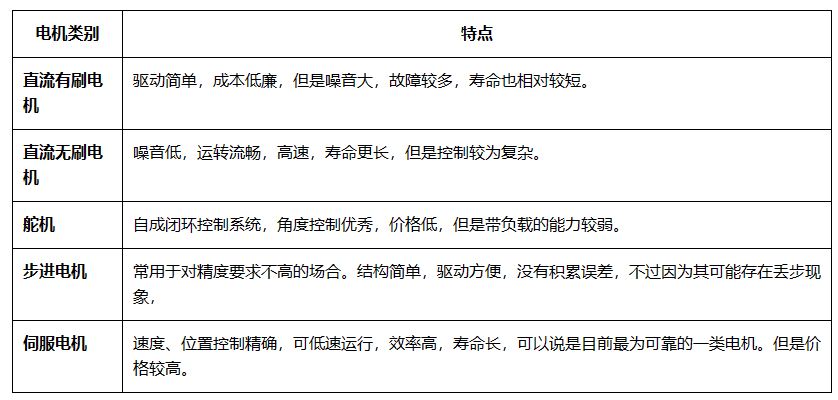
舵機(jī)是什么 各類(lèi)電機(jī)的特點(diǎn)
舵機(jī) 舵機(jī)是一種“特殊”的直流電機(jī),其構(gòu)造不僅只有電機(jī)部分,而且還自帶一個(gè)控制器,所以舵機(jī)本身就是一....
伺服電機(jī)介紹 電機(jī)常用名詞有哪些
伺服電機(jī) “伺服”一詞是來(lái)源于希臘語(yǔ)“奴隸”的意思,那么伺服電機(jī)也可以理解為絕對(duì)服從控制信號(hào)指揮電機(jī)....
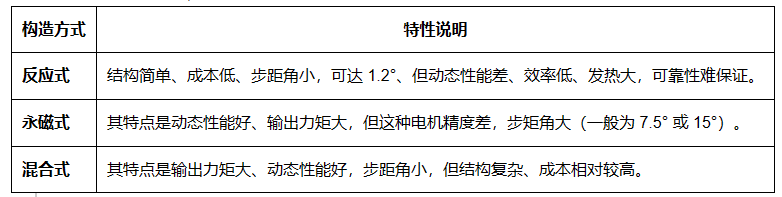
步進(jìn)電機(jī)分類(lèi)及特點(diǎn)
步進(jìn)電機(jī) 步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€(xiàn)位移的開(kāi)環(huán)控制電機(jī),是現(xiàn)代數(shù)字程序控制系統(tǒng)中的主....
直流電機(jī)是什么 直流電機(jī)有幾種
直流電機(jī) 在直流電機(jī)中還分為普通的直流電機(jī)、直流減速電機(jī),有刷和無(wú)刷,共分為: 直流有刷電機(jī) 直流有....
電機(jī)類(lèi)型分為哪幾種
我們?cè)趯W(xué)習(xí)和使用PID的時(shí)候,可能會(huì)有很多電機(jī)的選擇。然而不同的電機(jī)使用的PID參數(shù)是不太一樣的。所....
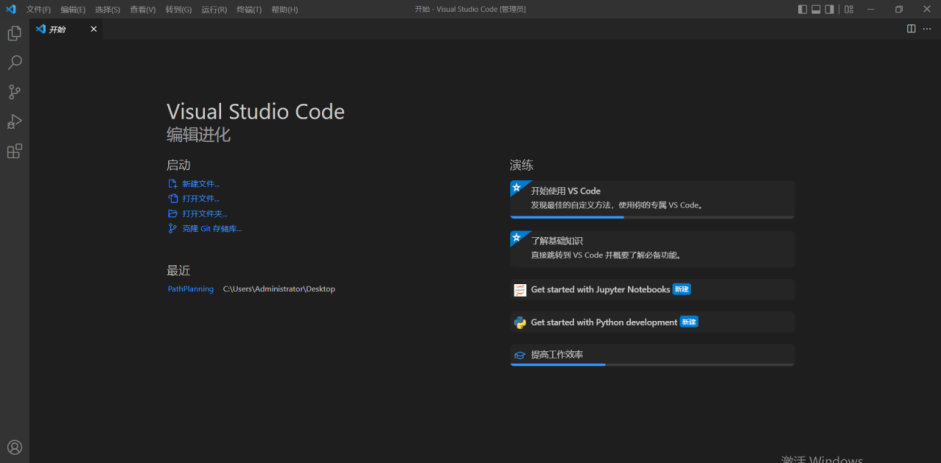
機(jī)器人路徑基于采樣的規(guī)劃
路徑規(guī)劃算法主要可分成兩種,一種是基于搜索結(jié)果的規(guī)劃,另一類(lèi)便是本文中將要提及的基于采樣的規(guī)劃。 一....
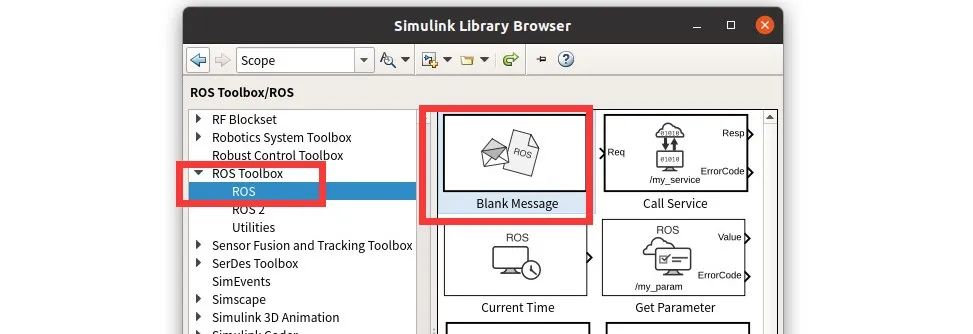
Matlab中創(chuàng)建一個(gè)Message方法
創(chuàng)建一個(gè)空白R(shí)OS消息,并用機(jī)器人路徑的X和Y位置填充它。然后將更新后的ROS消息發(fā)布到ROS網(wǎng)絡(luò)。....
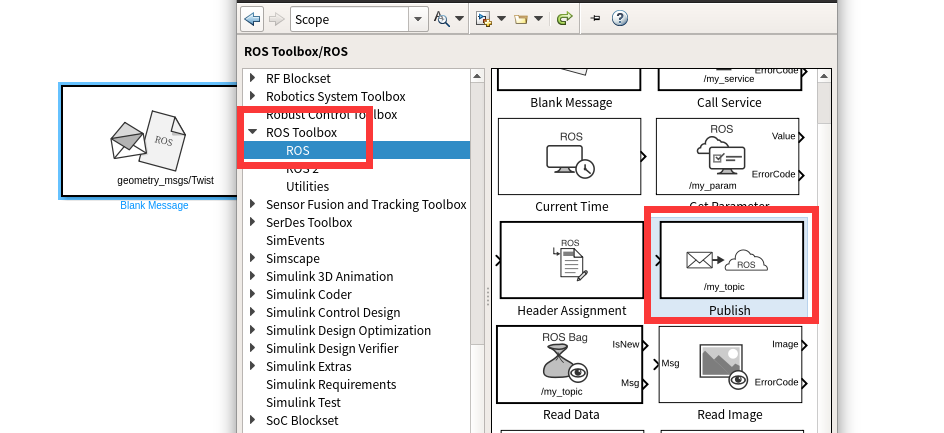
Simulink中如何創(chuàng)建一個(gè)Publisher
創(chuàng)建一個(gè)Publisher 配置一個(gè)block,并向/location的節(jié)點(diǎn)發(fā)送一條geometry....
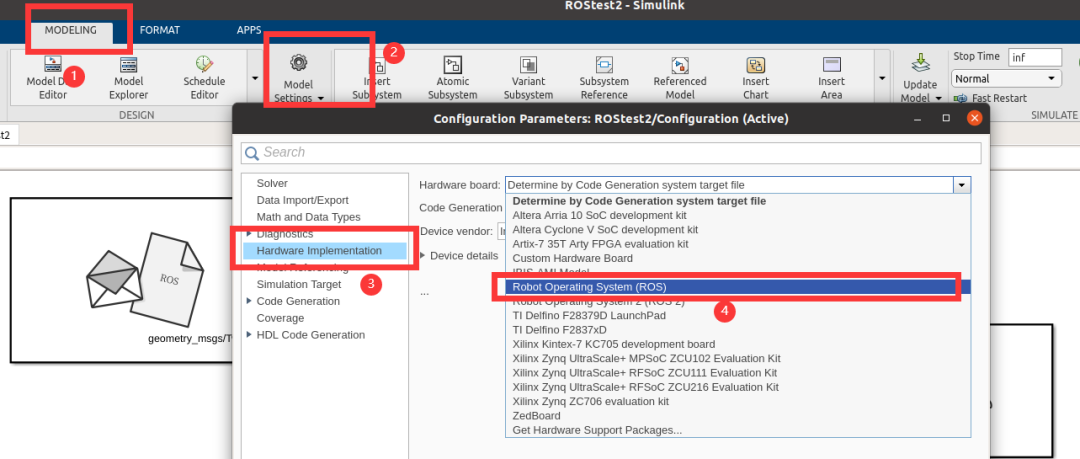
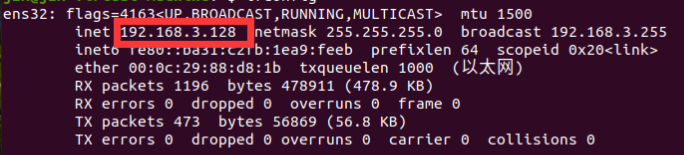
如何初始化ROS并創(chuàng)立鏈接
Simulink對(duì)機(jī)器人操作系統(tǒng)(ROS)的支持使我們能夠創(chuàng)建與ROS網(wǎng)絡(luò)一起工作的Simulink....
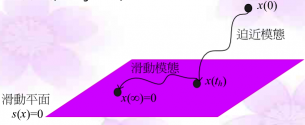
滑模控制是什么 優(yōu)缺點(diǎn)有哪些
滑模控制目的 對(duì)于滑模控制而言,我覺(jué)得我們先要明白其目的再來(lái)學(xué)習(xí)。 一開(kāi)始我們對(duì)滑動(dòng)控制的定義是:滑....
基于車(chē)輛運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)模型的橫向控制算法
無(wú)模型的 PID 橫向控制算法參數(shù)少,簡(jiǎn)單易用,但是由于沒(méi)有考慮車(chē)輛系統(tǒng)動(dòng)力學(xué)特性及路徑本身的動(dòng)態(tài)變....

基于車(chē)輛動(dòng)力學(xué)模型的橫向控制
基于車(chē)輛運(yùn)動(dòng)學(xué)模型的方法忽略了車(chē)輛的動(dòng)力學(xué)特性,因此在 車(chē)速過(guò)快 或者 曲率變化率過(guò)大 的情況下該算....

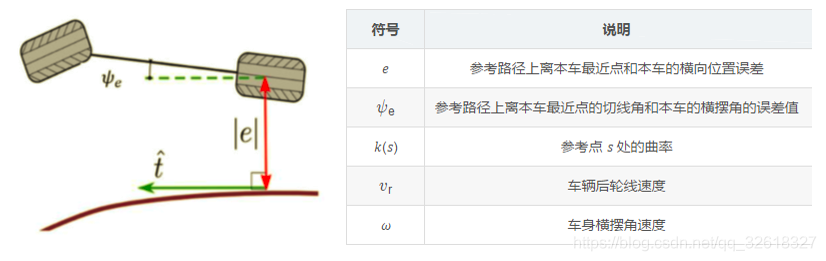
基于車(chē)輛運(yùn)動(dòng)學(xué)模型的控制方法
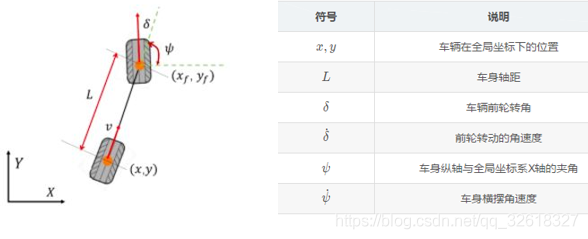
車(chē)輛運(yùn)動(dòng)學(xué)模型 基于車(chē)輛運(yùn)動(dòng)學(xué)模型的控制方法主要考慮了車(chē)輛的運(yùn)動(dòng)學(xué)約束對(duì)車(chē)輛控制的影響。 平時(shí)見(jiàn)到的....
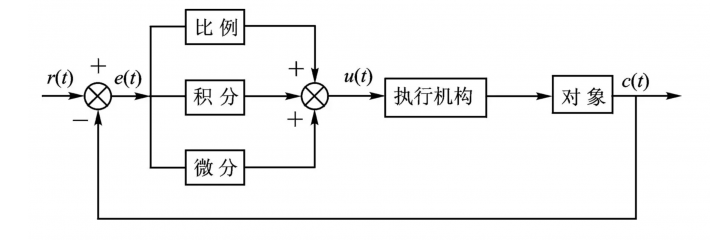
無(wú)人駕駛車(chē)輛的反饋控制介紹
1.1 無(wú)人駕駛車(chē)輛 大到類(lèi)似百度apollo無(wú)人車(chē),無(wú)人配送車(chē),小到掃地機(jī)器人,其實(shí)都是無(wú)人駕駛車(chē)....
機(jī)器人中特殊的消息類(lèi)型
圖像信息 MATLAB提供了對(duì)圖像消息的支持,其消息類(lèi)型始終為sensor_msgs/Image。 ....
如何將ROS數(shù)據(jù)類(lèi)型轉(zhuǎn)換為MATLAB數(shù)據(jù)類(lèi)型
** Message數(shù)據(jù)轉(zhuǎn)化** 由于在Matlab中,ROS消息的每個(gè)元素是獨(dú)立的,因此無(wú)法驗(yàn)證具....

在MATLAB中如何保存和加載消息
保存和加載消息 您可以保存消息并存儲(chǔ)內(nèi)容以供以后使用。 例如從訂閱者獲取一條新消息。 posedat....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)