TogetherROS?·Bot零拷貝性能測試 我們使用TogetherROS?·Bot系統內部集成....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 16:51
?1259次閱讀
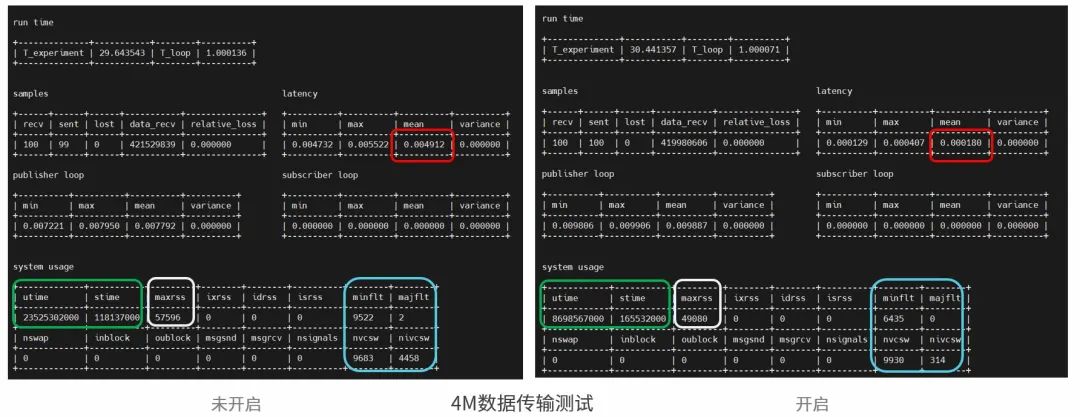
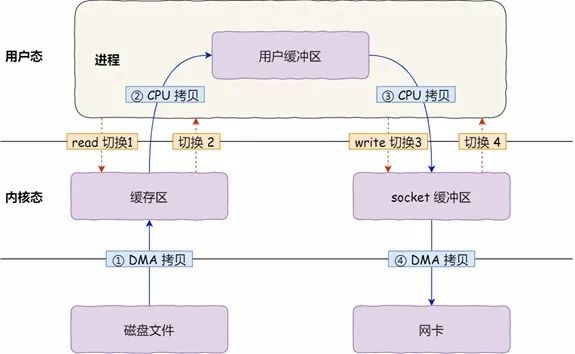
在傳統操作系統的數據傳輸過程中,系統內部會在磁盤、內存、緩存中多次進行數據拷貝,每次都會占用CPU的....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 16:20
?1158次閱讀
分布式網絡分組 沒問題,ROS2提供了一個DOMAIN的機制,就類似分組一樣,處于同一個DOMAIN....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 15:59
?1547次閱讀
智能機器人的功能繁多,全都放在一個計算機里,經常會遇到計算能力不夠、處理出現卡頓等情況,如果可以將這....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 15:49
?1749次閱讀

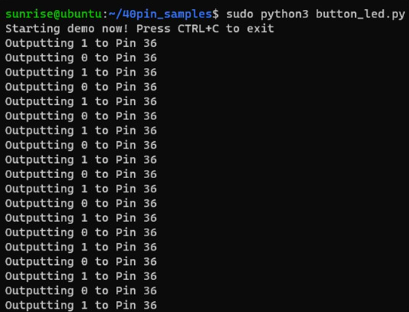
學習了GPIO的輸入與輸出功能后,我們就可以做一些自動化的功能了。 硬件接線 比如我們同時連接一個按....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 14:28
?944次閱讀
GPIO不止有輸入功能,還有輸出功能,大家應該經常看到電子設別上的LED燈吧,這就是典型的IO輸出控....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 14:22
?983次閱讀

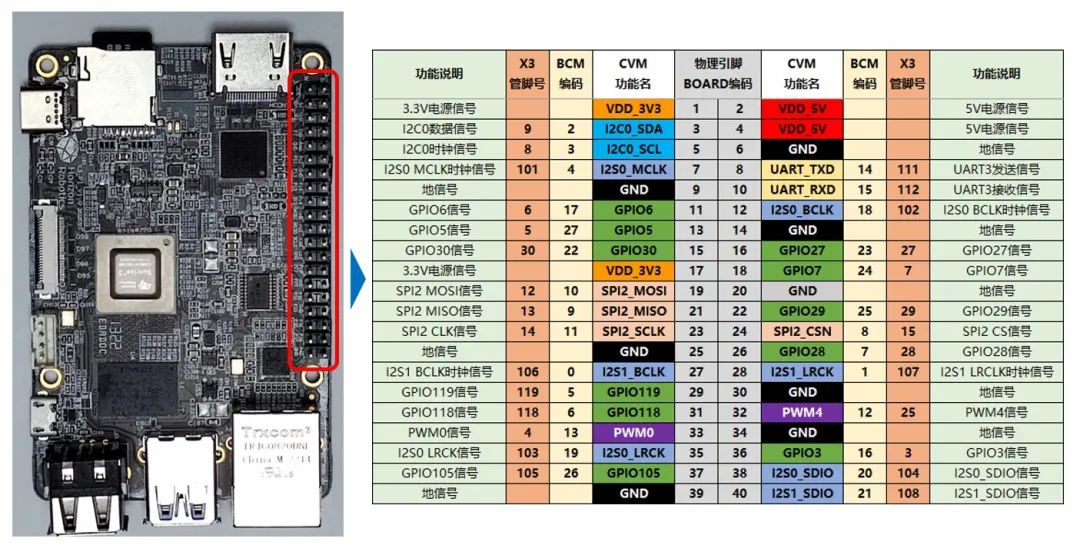
引腳復用配置工具 雖然從硬件上看,擴展出來的引腳只有40個,不過大部分引腳還可以配置成多種功能,這樣....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 11:49
?1216次閱讀
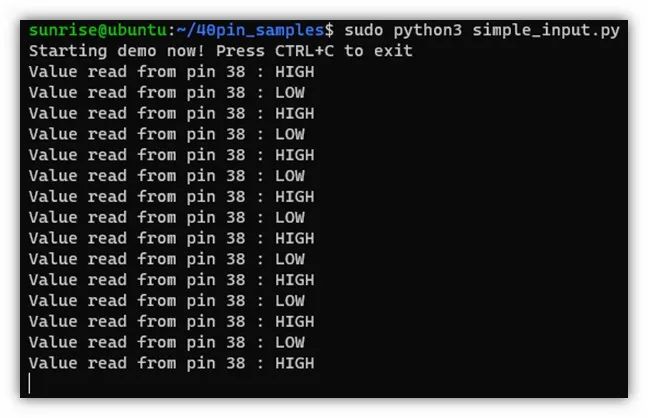
數字輸入與輸出是最常用的一種外設通信方式,雖然每一個端口只有0和1兩種狀態,但卻可以組合出各種各樣的....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 11:45
?2331次閱讀
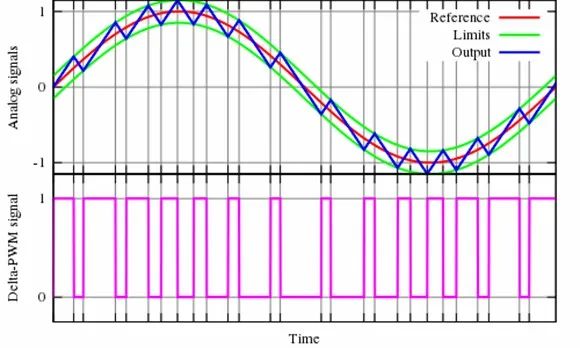
接下來我們就來試一試,通過PWM讓一個LED實現不同亮度的變化,也就是我們常見的呼吸燈了。 硬件接線....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 11:40
?1782次閱讀

我們已經可以用GPIO控制LED燈一閃一閃亮晶晶了,這樣只有亮和滅的狀態似乎還是太簡單了,能不能對L....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 11:37
?2157次閱讀
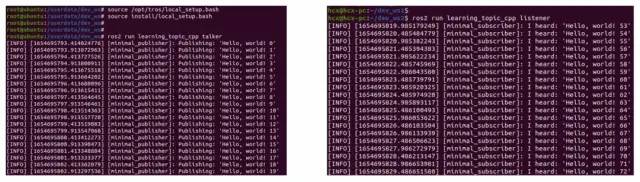
ros1: talker 注冊 listener 注冊 ROS Master 進行信息匹配 list....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 11:26
?2036次閱讀

基本概念: ROS是一個用于在不同進程間匿名的發布、訂閱、傳遞信息的中間件。 ROS2系統的核心部分....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 11:21
?2844次閱讀
運行示例程序 接下來就可以運行串口通信的例程了。 $ sudo python3 test_seria....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 10:55
?977次閱讀
現在的傳感器和執行器種類越來越多,需要和控制器傳輸的數據也是多種多樣,只用GPIO來控制和讀取的話,....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 10:51
?1495次閱讀

ROS主控讀取stm32發送的數據 之后便可以通過 Stm32_Serial .read (Rece....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 17:49
?2074次閱讀
這里以一個智能車代碼工程為例,抽取串口通信部分代碼 在頭文件中,進行串口頭文件的包含 # inclu....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 17:47
?2016次閱讀
硬件連接 ROS主控通過usb線連接到一個TTL電平轉換芯片,再由這個電平轉換芯片連接STM32芯片....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 17:45
?2739次閱讀

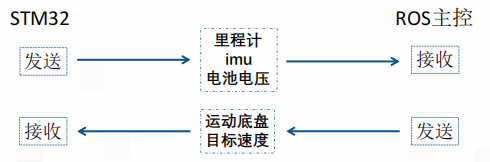
以簡單的智能車為例,一般會存在兩個控制器,一個是運行ROS的主控,另一個是運行電機控制和傳感器信息采....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 17:38
?2205次閱讀
ROS Motion Planning運動規劃庫采用了非常靈活和簡易的方式來按照我們的需求去進行配置....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 17:35
?3090次閱讀

下載/克隆ROS Motion Planning運動規劃庫 可以執行以下兩條指令來從Github上克....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 17:29
?2290次閱讀
創建新的ROS工作空間 由于ROS Motion Planning運動規劃庫與Navigation導....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 17:09
?2196次閱讀

簡單輸入對話框 simpledialog(簡單對話框)包含如下常用函數: 實操代碼 """簡單對話框....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 17:05
?1585次閱讀

文件對話框 文件對話框幫助我們實現可視化的操作目錄、操作文件. 將文件、目錄的信息傳入到程序中 文件....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:58
?1494次閱讀

Scale 移動滑塊 Scale(移動滑塊)用于在指定的數值區間,通過滑塊的移動來選擇值 實操代碼 ....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:48
?1956次閱讀
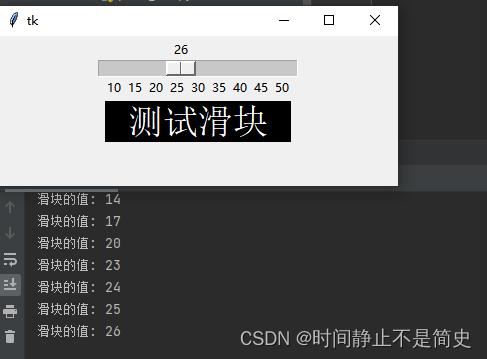
大家好, 我是了不起, 歡迎收看我的冒險之旅。 今天我們將深入學習GUI圖形界面編程tkinter,....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:42
?1554次閱讀

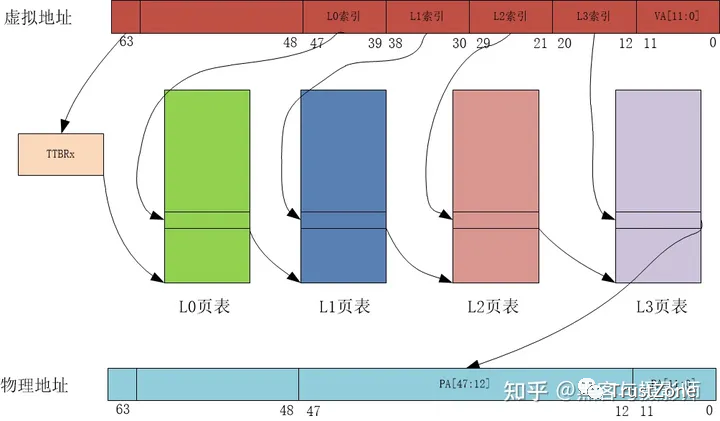
當然虛擬地址空間劃分不只是如此。因為目前應用程序沒有那么大的內存需求,所以ARM64處理器不支持完全....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:35
?1724次閱讀
物理頁面大小一級地址總線寬度不同,頁表的級數也不同。以AArch64運行狀態,4KB大小物理頁面,4....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:28
?1945次閱讀
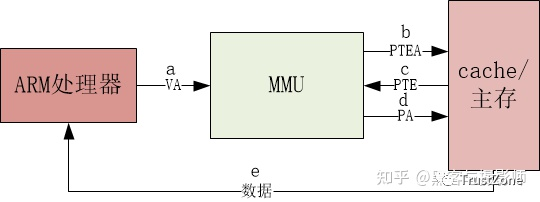
頁命中、缺頁 (1)頁命中 ? a) 處理器要對虛擬地址VA進行訪問。 ? b) MMU的TLB沒有....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:19
?2135次閱讀
1-MMU相關的基本概念 (1)虛擬地址相關基本概念 ? 虛擬內存(Virtual Memory,V....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:11
?1470次閱讀
TWU table walk unit:包含從內存中讀取translation tables的邏輯 ....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-26 16:04
?1318次閱讀




 工商網監
工商網監