 四足機器人步態規劃與接觸狀態
四足機器人步態規劃與接觸狀態

0、步態規劃
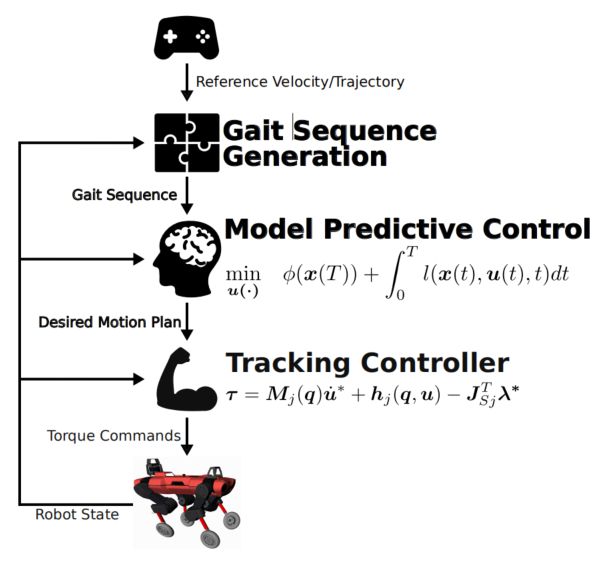
四足機器人控制當中,步態是至關重要的一項。我們可以簡單理解成四足機器人運動過程中各腿的狀態,在這套設計方案中,我們對步態的規劃主要分成兩大主要部分,即接觸狀態和周期函數。而步態規劃的目的,就是創建一個關于的足端接觸狀態的周期函數。
1、接觸狀態
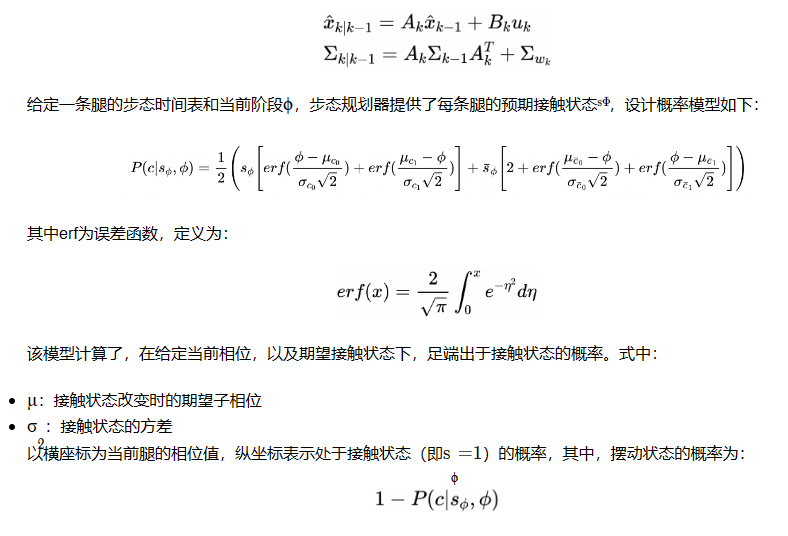
四足機器人行進過程中,根據足端與地面是否發生接觸,我們可以規定各條腿的兩種接觸狀態,即接觸(contact)與擺動(swing)
總控制器會根據步態規劃給出的狀態,移交至對應的控制器去處理,即擺動腿控制器(swing leg controll),接觸腿控制器(contact leg control)。
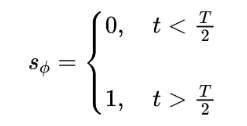
對于這兩種狀態,可以簡單地用一個布爾類型的值s來定義,即

對于周期性的步態規劃,我們可以用下標Φ來進行區分,可以寫成:

2、步態周期
四足機器人的運動歸根到底都是周期運動,我們無須量化機器人運動的整個過程,因此如何量化定義一個完整的步態周期顯得極為重要,在此我們使用基于時間的周期函數,定義一個基準相位值,公式如下:
其中,
- t:當前運行時間
- t0:當前周期開始時間
- T:一個步態周期
同樣我們可以利用取余的方法來簡化上述周期函數,兩者并無實質的區別:
其中
- %為取余運算
- t為當前運行時間
對于相同類型的周期信號,我們可以利用相位差來表征周期函數之間的差別,因此有了基準相位函數之后,我們就可以利用其來定義各條腿的相位,如下式:
其中,Φi,offset為第條腿與基準相位的相位差。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制器
+關注
關注
114文章
17791瀏覽量
193169 -
機器人
+關注
關注
213文章
31079瀏覽量
222253 -
四足機器人
+關注
關注
1文章
99瀏覽量
15691
發布評論請先 登錄
相關推薦
熱點推薦
四足機器人的機構設計
四足機器人屬于復雜機電系統,需要綜合生物、機械、電子、控制等學科內容,具體涉及仿生機構設計、靈巧運動機構設計、高性能驅動器制造,行走穩定性控制、強化學習等在內的多個研究方向。其中,機構設計是保障
發表于 09-15 06:54
平面液壓雙足機器人步態規劃及阻抗控制研究說明
足式機器人的運動具有足與地面非連續接觸的特點,這使得它對不平路面環境的適應性較強,可以應用在探險救災等危險的任務中。與四
發表于 01-17 14:19
?15次下載
怎么樣實現雙足機器人參數化步態規劃詳細方法說明
合理規劃,進行參數化建模研究,從而解決在不同步行環境中機器人的運行過程中的問題。本課題是在雙足機器人平路行走的基礎上對其參數化步態進行
發表于 03-23 16:56
?9次下載
如何實現雙足機器人爬樓梯的步態規劃與參數優化
爬樓梯時的步態規劃問題作了以下幾方面研究工作: 首先,回顧了雙足機器人的發展歷史和研究現狀,并對目前主動型雙足
發表于 04-07 16:27
?34次下載



 工商網監
工商網監
評論