 如何將ROS數據類型轉換為MATLAB數據類型
如何將ROS數據類型轉換為MATLAB數據類型

** Message數據轉化**
由于在Matlab中,ROS消息的每個元素是獨立的,因此無法驗證具有多個值在數學層面上的有效性。因為每個值都可以單獨設置,所以消息不會將屬性作為一個整體進行驗證。
例如,四元數消息包含w、x、y和z屬性,但該消息并不強制四元數作為一個整體是有效的。所以有可能在單獨修改一個四元數信息后,這個四元數是不符合模型的。
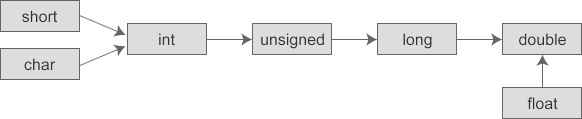
同時消息屬性還可以具有各種數據類型。MATLAB使用ROS設置的規則來確定這些數據類型。
為此,這些數據類型必須映射到MATLAB數據類型才能在MATLAB中使用。下表總結了如何將ROS數據類型轉換為MATLAB數據類型。

同時在Matlab中也自帶了一些常用的msg包,這些包包含了常用的消息類型、服務類型或操作類型。可以在MATLAB命令窗口中調用rosmsg list查看,當然也可以通過第二講提到的方法。
通過ROS Toolbox的ROS自定義消息支持來生成新的消息定義。同時值得注意的是,在指定消息類型時,輸入字符向量必須與rosmsg列表中列出的字符向量完全匹配。
ackermann_msgs
actionlib
actionlib_msgs
actionlib_tutorials
adhoc_communication
app_manager
applanix_msgs
ar_track_alvar
arbotix_msgs
ardrone_autonomy
asmach_tutorials
audio_common_msgs
axis_camera
base_local_planner
baxter_core_msgs
baxter_maintenance_msgs
bayesian_belief_networks
blob
bond
brics_actuator
bride_tutorials
bwi_planning
bwi_planning_common
calibration_msgs
capabilities
clearpath_base
cmvision
cob_base_drive_chain
cob_camera_sensors
cob_footprint_observer
cob_grasp_generation
cob_kinematics
cob_light
cob_lookat_action
cob_object_detection_msgs
cob_perception_msgs
cob_phidgets
cob_pick_place_action
cob_relayboard
cob_script_server
cob_sound
cob_srvs
cob_trajectory_controller
concert_msgs
control_msgs
control_toolbox
controller_manager_msgs
costmap_2d
create_node
data_vis_msgs
designator_integration_msgs
diagnostic_msgs
dna_extraction_msgs
driver_base
dynamic_reconfigure
dynamic_tf_publisher
dynamixel_controllers
dynamixel_msgs
epos_driver
ethercat_hardware
ethercat_trigger_controllers
ethzasl_icp_mapper
explorer
face_detector
fingertip_pressure
frontier_exploration
gateway_msgs
gazebo_msgs
geographic_msgs
geometry_msgs
gps_common
graft
graph_msgs
grasp_stability_msgs
grasping_msgs
grizzly_msgs
handle_detector
hector_mapping
hector_nav_msgs
hector_uav_msgs
hector_worldmodel_msgs
household_objects_database_msgs
hrpsys_gazebo_msgs
humanoid_nav_msgs
iai_content_msgs
iai_kinematics_msgs
iai_pancake_perception_action
image_cb_detector
image_exposure_msgs
image_view2
industrial_msgs
interaction_cursor_msgs
interactive_marker_proxy
interval_intersection
jaco_msgs
joint_states_settler
jsk_footstep_controller
jsk_footstep_msgs
jsk_gui_msgs
jsk_hark_msgs
jsk_network_tools
jsk_pcl_ros
jsk_perception
jsk_rviz_plugins
jsk_topic_tools
keyboard
kingfisher_msgs
kobuki_msgs
kobuki_testsuite
laser_assembler
laser_cb_detector
leap_motion
linux_hardware
lizi
manipulation_msgs
map_merger
map_msgs
map_store
mavros
microstrain_3dmgx2_imu
ml_classifiers
mln_robosherlock_msgs
mongodb_store
mongodb_store_msgs
monocam_settler
move_base_msgs
moveit_msgs
moveit_simple_grasps
multimaster_msgs_fkie
multisense_ros
nao_interaction_msgs
nao_msgs
nav_msgs
nav2d_msgs
nav2d_navigator
nav2d_operator
navfn
network_monitor_udp
nmea_msgs
nodelet
object_recognition_msgs
octomap_msgs
p2os_driver
pano_ros
pcl_msgs
pcl_ros
pddl_msgs
people_msgs
play_motion_msgs
polled_camera
posedetection_msgs
pr2_calibration_launch
pr2_common_action_msgs
pr2_controllers_msgs
pr2_gazebo_plugins
pr2_gripper_sensor_msgs
pr2_mechanism_controllers
pr2_mechanism_msgs
pr2_msgs
pr2_power_board
pr2_precise_trajectory
pr2_self_test_msgs
pr2_tilt_laser_interface
program_queue
ptu_control
qt_tutorials
r2_msgs
razer_hydra
rmp_msgs
robot_mechanism_controllers
robot_pose_ekf
roboteq_msgs
robotnik_msgs
rocon_app_manager_msgs
rocon_service_pair_msgs
rocon_std_msgs
rosapi
rosauth
rosbridge_library
roscpp
roscpp_tutorials
roseus
rosgraph_msgs
rospy_message_converter
rospy_tutorials
rosruby_tutorials
rosserial_arduino
rosserial_msgs
rovio_shared
rtt_ros_msgs
s3000_laser
saphari_msgs
scanning_table_msgs
scheduler_msgs
schunk_sdh
segbot_gui
segbot_sensors
segbot_simulation_apps
segway_rmp
sensor_msgs
shape_msgs
shared_serial
sherlock_sim_msgs
simple_robot_control
smach_msgs
sound_play
speech_recognition_msgs
sr_edc_ethercat_drivers
sr_robot_msgs
sr_ronex_msgs
sr_utilities
statistics_msgs
std_msgs
std_srvs
stdr_msgs
stereo_msgs
stereo_wall_detection
tf
tf2_msgs
theora_image_transport
topic_proxy
topic_tools
trajectory_msgs
turtle_actionlib
turtlebot_actions
turtlebot_calibration
turtlebot_msgs
turtlesim
um6
underwater_sensor_msgs
universal_teleop
uuid_msgs
velodyne_msgs
view_controller_msgs
visp_camera_calibration
visp_hand2eye_calibration
visp_tracker
visualization_msgs
wfov_camera_msgs
wge100_camera
wifi_ddwrt
wireless_msgs
yocs_msgs
zeroconf_msgs
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
matlab
+關注
關注
189文章
3025瀏覽量
238696 -
數據類型
+關注
關注
0文章
237瀏覽量
14185 -
ROS
+關注
關注
1文章
293瀏覽量
18722
發布評論請先 登錄
相關推薦
熱點推薦
1-D數組波形(DBL)是什么樣的數據類型,如何將其轉換為波形(DBL),和數組
請問,1-D數組波形(DBL)是什么樣的數據類型,如何將其轉換為波形(DBL),和數組
發表于 11-10 15:48
Windows -編程-數據類型
Windows -編程-數據類型Rust 中的每個值都有特定的數據類型,它告訴 Rust 指定了什么樣的數據,以便它知道如何處理這些數據。我們將
發表于 08-24 14:30
vhdl數據類型
VHDL中的標識符可以是常數、變量、信號、端口、子程序或參數的名字。VHDL中的數據類型可以分成四大類: 標量型(SCALAR TYPE):屬單元素的最基本的數據類型,通常用于描述一個單值數據對象
發表于 03-30 15:59
?11次下載
Struct結構數據類型
Struct類型是一種由多個不同數據類型元素組成的數據結構,其元素可以是基本數據類型,也可以是Struct、數組等復雜數據類型以及PLC
結構數據類型(Struct)及應用案例
Struct數據類型使用非常靈活,隨時可以使用,但是相對于PLC數據類型 (UDT) 有以下缺點,所以建議需要使用Struct類型時,可以使用PLC數據類型(UDT)代替。
什么是數據類型轉換
常用的3種數據類型:1、Python數據類型第一種:字符串(str)。
2、Python數據類型第二種:整數(int)。
3、Python數據類型第三種:浮點數(float)。
定義數據類型
在運算之前我們必須首先定義出數據類型,定義出腳本支持的數據類型,這是運算的基礎。
這一小節我們將定義出數據類型,在這里我們暫時定義四個數據類型:
GaussDB數據類型轉換介紹
數據類型轉換在實際應用中非常常見。GaussDB 作為一款企業級分布式關系型數據庫,在實際業務場景使用中,也會避免不了數據類型的轉換。以下是
ARRAY 數據類型的變量
中,系統將提供自動完成功能。 將打開“數組”對話框。 在“數據類型”文本框中,指定數組元素的數據類型。 在“ARRAY 限值”(ARRAY limits) 輸入字段中,指定各維度的上限
PLC變量的數據類型整理
BYTE、WORD、DWORD、SINT、USINT、INT、UINT、DINT?和UDINT。
注意,當較長的數據類型轉換為較短的數據類型時,會丟失高位信息
發表于 09-19 12:19
?7052次閱讀
Redis的數據類型有哪些
Redis的數據類型有哪些?有五種常用數據類型:String、Hash、Set、List、SortedSet。以及三種特殊的數據類型:Bitmap、HyperLogLog、Geospatial
plc數據類型怎么理解和應用
PLC(可編程邏輯控制器)是一種工業自動化設備,用于控制機械和工業過程。在PLC編程中,數據類型是非常重要的概念,因為它決定了程序中數據的存儲和處理方式。正確理解和應用PLC數據類型是編寫有效、可靠



 工商網監
工商網監
評論