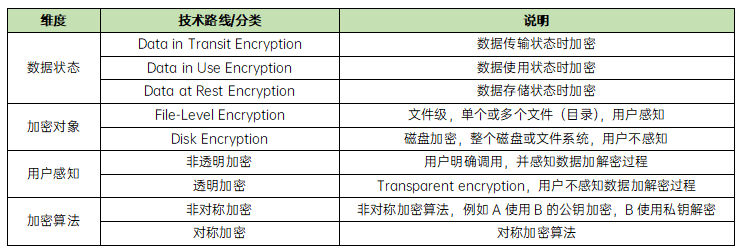
磁盤加密技術 如上節所述,Disk Encryption磁盤加密,目標是保護數據at Rest狀態下....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-29 10:54
?4093次閱讀

威脅模型 數據生命周期管理(Data Lifecycle Management)通常將數據劃分為生產....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-29 10:44
?1078次閱讀
歸一化處理 很多一開始的小白,在做電磁這一部分時,可能并不太知道歸一化,只是通過濾波算法處理后就用解....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 17:45
?1992次閱讀
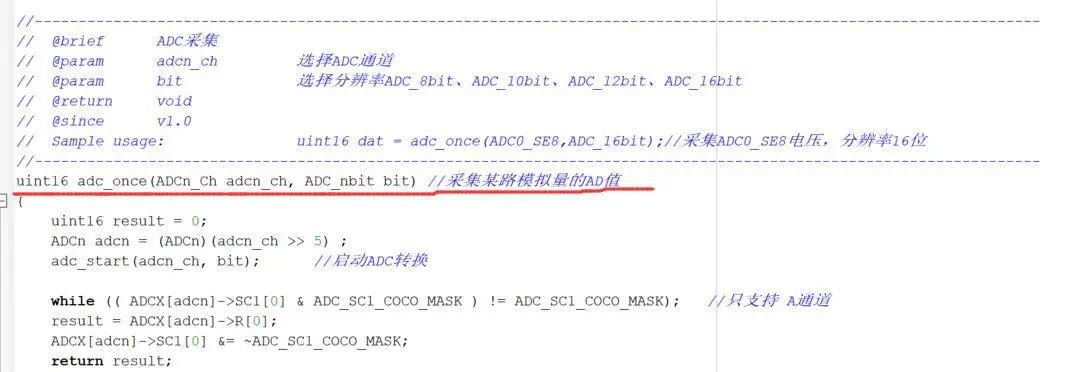
采集濾波 簡單地一個adc采集獲取電感的數值是遠遠不夠,采集到的信息可能是不準確的,需要采集多次,通....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 17:42
?1350次閱讀
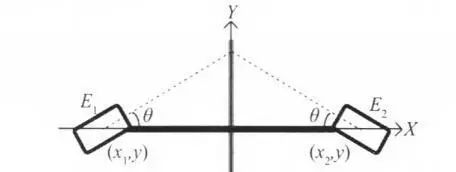
八字形電感排布方案 八字形電感排布同樣也可以跟雙水平電感一樣,在直道行駛時保持良好的采集數據獲取。 ....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 17:37
?2470次閱讀
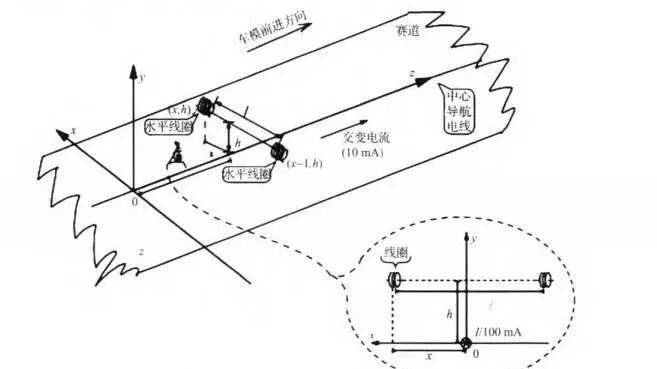
工字電感 感應賽道交變磁場,產生感應電動勢,后續電路通過對感應電動勢進行一些列的選頻、放大、檢波,得....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 17:32
?1735次閱讀
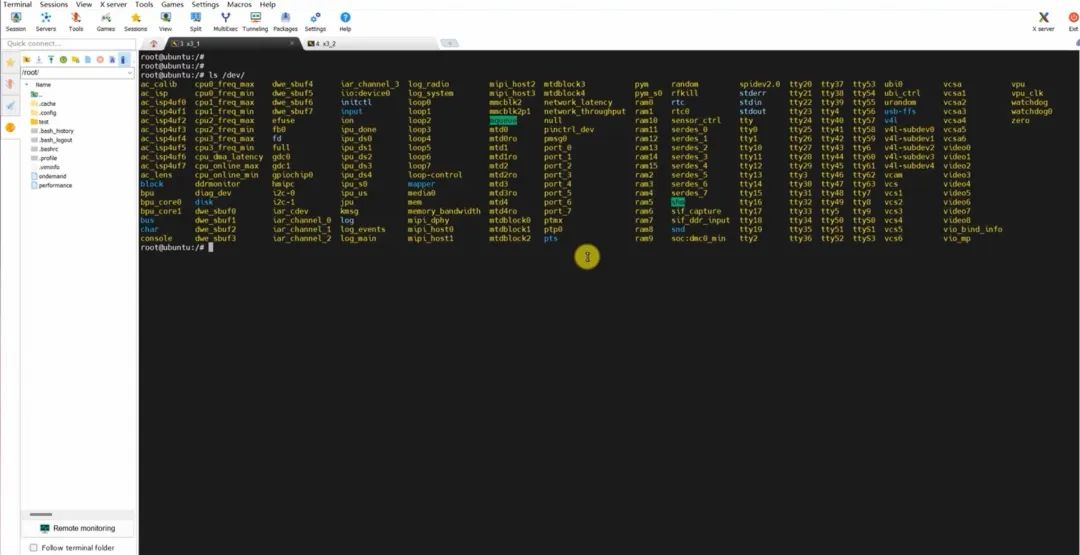
接下來,我們就運行一個更為直觀的案例——目標檢測。 在這個案例中,需要大家找一個USB的相機,連接到....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 16:41
?1196次閱讀
如果你是一個ROS2的開發者,可能對剛才我們使用的ROS2命令比較熟悉,這時你可能也會產生一個問題:....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 16:29
?2125次閱讀

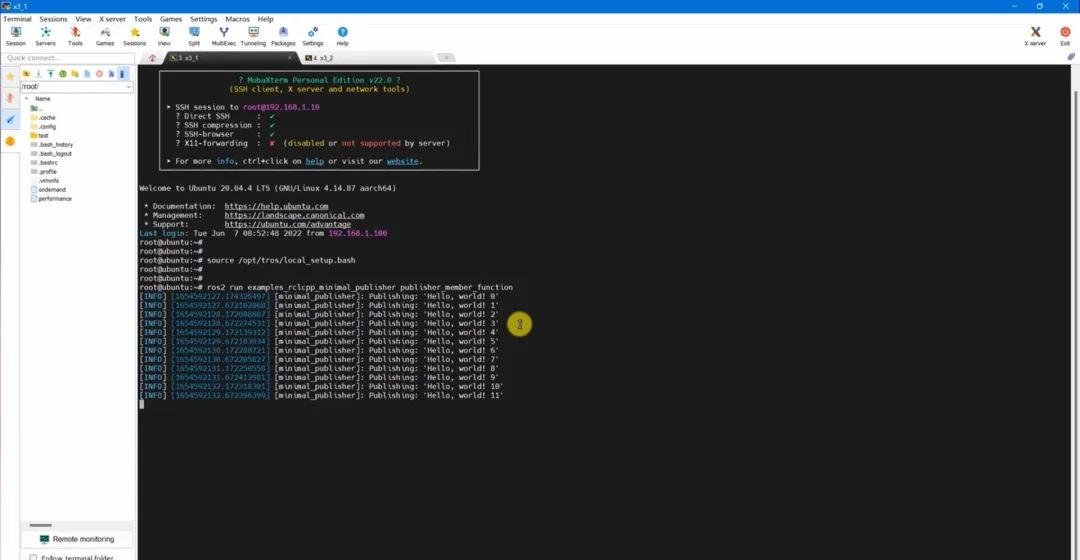
通信測試 先來測試一下TogetherROS?·Bot系統的通信功能。 我們需要啟動兩個終端,分別連....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 16:19
?1263次閱讀
PID算法的代碼實現 舵機控制 在對舵機的控制中,我采用的是位置式PD算法。 將左右電感的偏差值賦給....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 15:57
?1641次閱讀
什么是歸一化 歸一化就是將所有數據都變成0-1之間的數,將數據映射到0~1范圍之內處理,使數據觀察更....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 15:50
?1769次閱讀
采樣信號濾波 什么是濾波 濾波(Wave filtering)是將信號中特定波段頻率濾除的操作,是抑....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 15:43
?2348次閱讀
將 XACRO文件轉換成 URDF 文件 并檢查 轉換的方法很簡單,ROS封裝了實現方法,我們只需進....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 14:42
?2009次閱讀
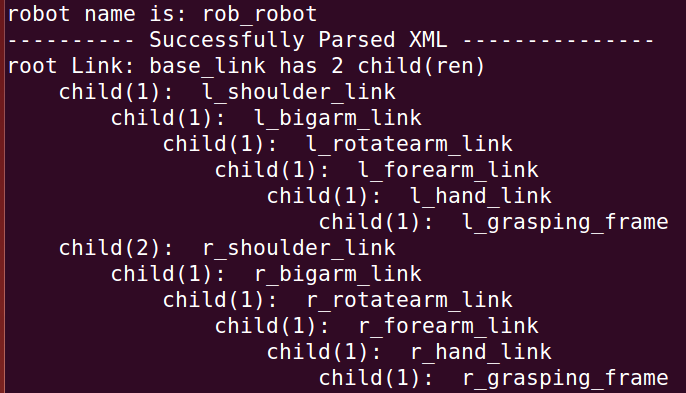
base_link的定義 base_link是所有的其他關節的基礎,也就是基坐標系所在的link。 ....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 14:27
?1289次閱讀
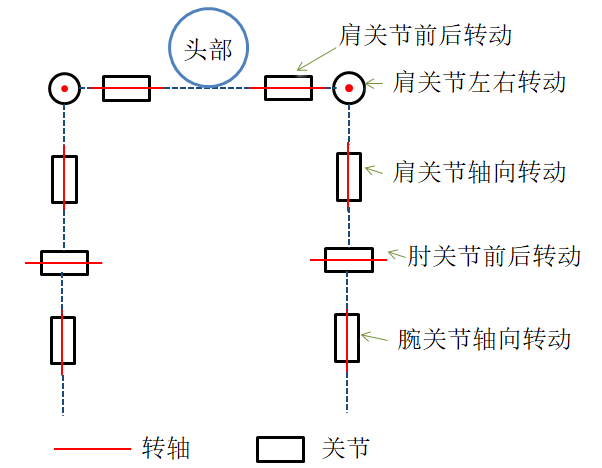
這個系列主要介紹機器人ROS模型的建立方法,ROS系統帶來的好處之一就是: 我們無需自己建立復雜的數....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 14:19
?1477次閱讀
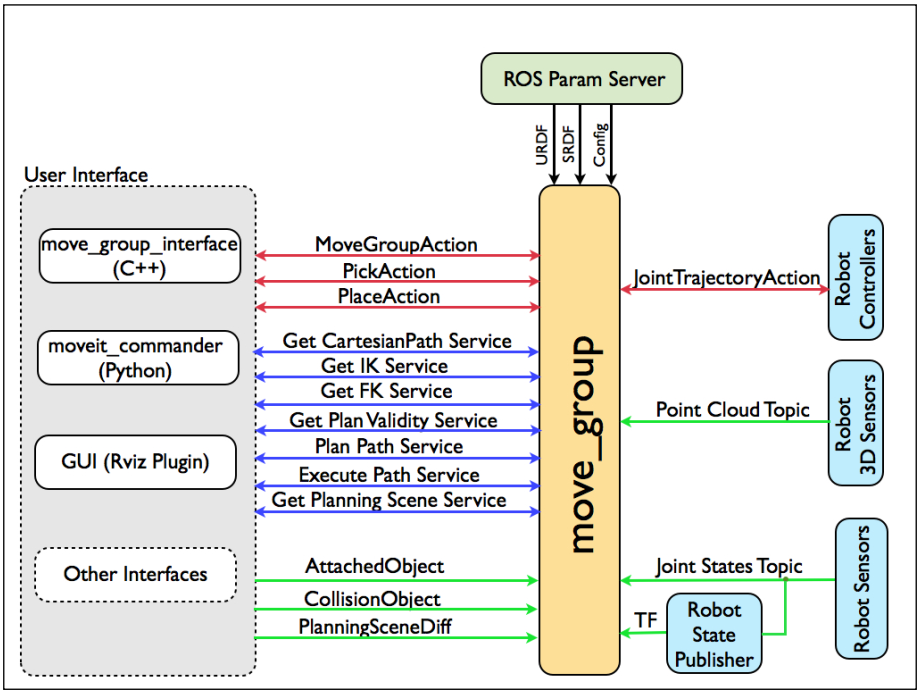
MoveIt的安裝 首先確保你的Linux上正確安裝了ROS系統。 安裝moveit,如果不想挑戰源....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 11:50
?1816次閱讀
機器人操作系統ROS目前最受關注的兩個模塊是導航(Navigation)和機械臂控制(MoveIt!....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 11:43
?1881次閱讀
匹配器 2.1 ICP點云精配準 template typename PointCloudPtr >....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 11:30
?1246次閱讀
最近在看PCL濾波配準等操作,之前在自動駕駛-激光雷達預處理/特征提取和提到了一些濾除點云等操作,但....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 11:24
?1384次閱讀
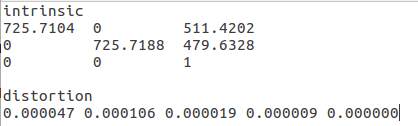
提取照片中的角點像素 首先需要把最上面獲得的相機內參畸變糾正參數以下圖的格式保存在 data/par....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 11:20
?1056次閱讀
提取激光雷達的角點坐標 將激光雷達的rosbag轉為pcd文件 打開pcdTransfer.laun....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 11:15
?1315次閱讀

ROS功能包:livox_camera_lidar_calibration提供了一個手動校準Livo....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-28 11:09
?1498次閱讀

2.1 激光雷達時間序列 這一幀數據中點的排列順序為從最高的線束到最低的線束進行排列,每條線束之間點....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 18:17
?965次閱讀
激光雷達作為自動駕駛最常用的傳感器,經常需要使用激光雷達來做建圖、定位和感知等任務。 而這時候使用降....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 18:11
?1840次閱讀
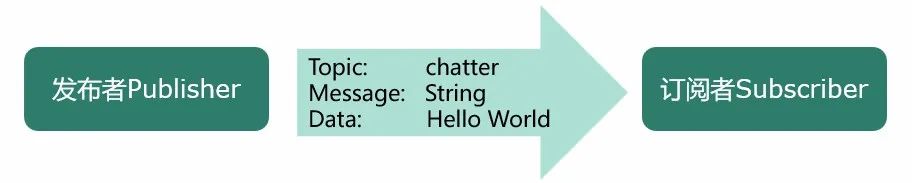
編程方法 了解了話題的基本原理,接下來我們就要開始編寫代碼啦。 創建工作空間 請大家先按照這個流程創....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 17:48
?1195次閱讀
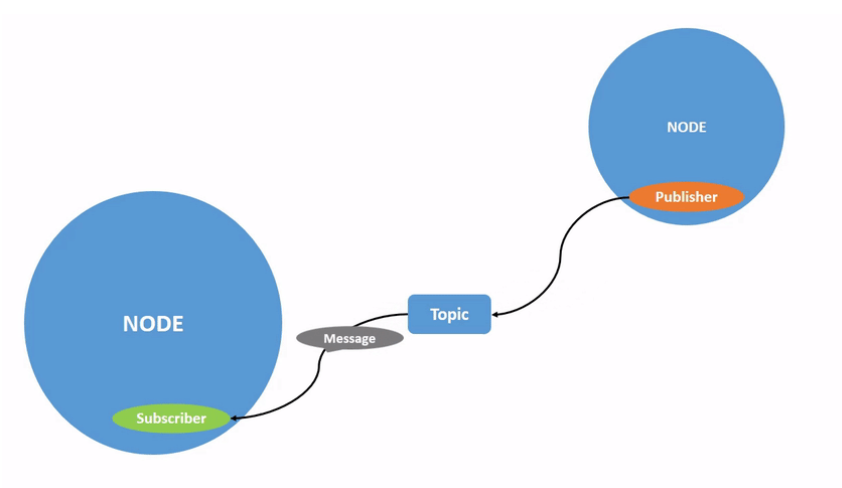
多對多通信 大家再仔細想下這些可以訂閱的東西,是不是并不是唯一的,我們每個人可以訂閱很多公眾號、報紙....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 17:42
?2232次閱讀
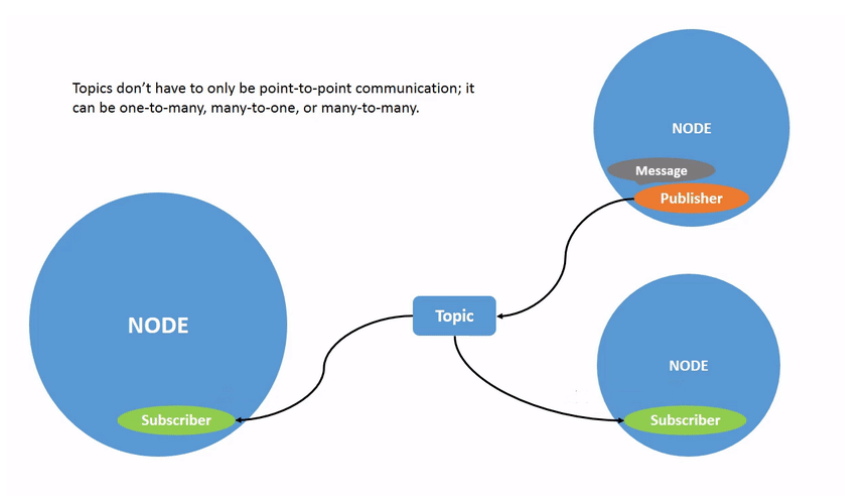
節點實現了機器人各種各樣的功能,但這些功能并不是獨立的,之間會有千絲萬縷的聯系,其中最重要的一種聯系....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 17:25
?1490次閱讀
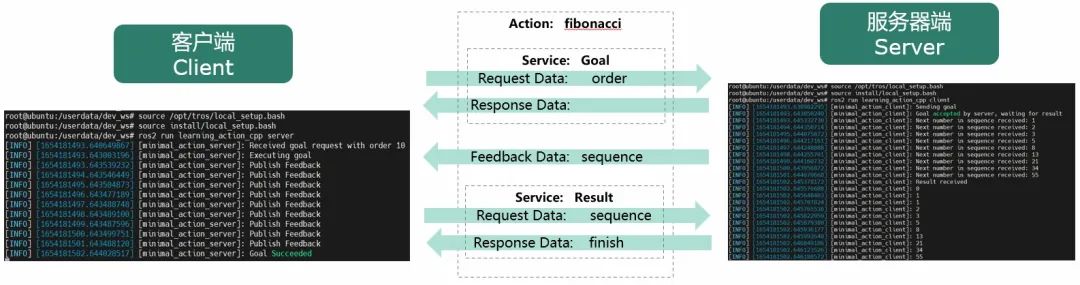
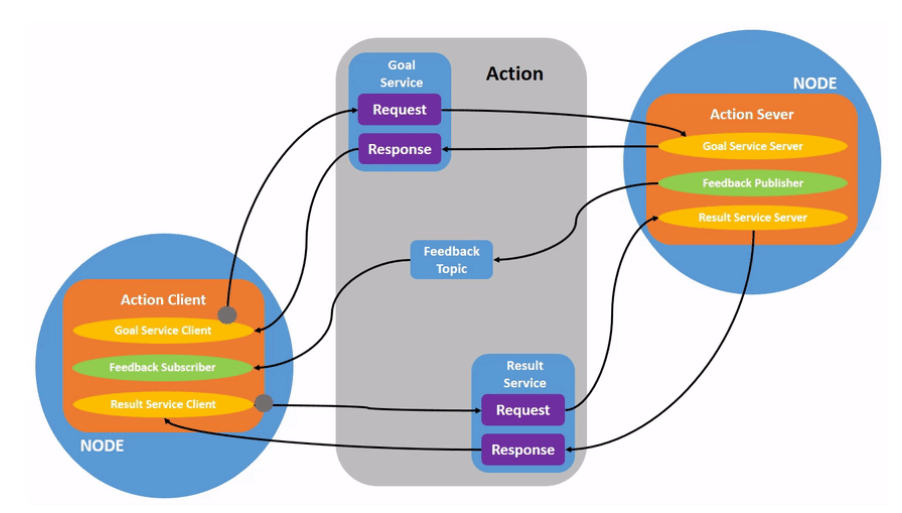
編程方法 相比之前話題和服務的程序,動作通信的例程相對較長,我們一起來運行并分析一下。 運行示例程序....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 17:10
?1046次閱讀
機器人是一個復雜的智能系統,并不僅僅是鍵盤遙控運動、識別某個目標這么簡單,我們需要實現的是送餐、送貨....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 17:05
?1509次閱讀
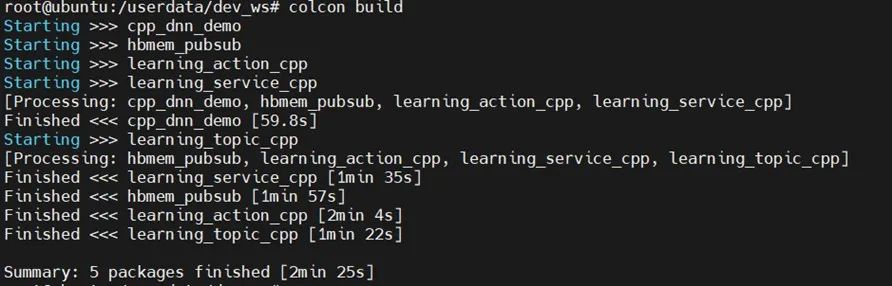
編程開發 為了方便大家使用,TogetherROS針對零拷貝功能進行了封裝,風格類似ROS2中話題通....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-27 16:55
?1125次閱讀




 工商網監
湘ICP備2023036445號-105-1
工商網監
湘ICP備2023036445號-105-1