一個cmd_tbl_t結構體變量包含了調用一條命令的所需要的信息。 ? 對于環境變量bootcmd�����,....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:37
?1481次閱讀

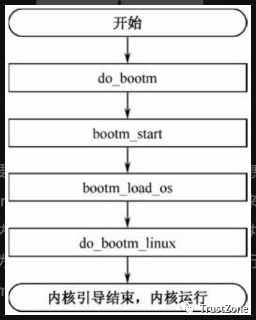
Bootm命令用來從memory啟動內核��,bootm命令的執行流程如下圖所示。 在串口終端輸入boo....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:33
?2142次閱讀
U-boot是通過執行u-boot提供的命令來加載Linux內核的����,其中 命令bootm的功能 即為....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:31
?1610次閱讀
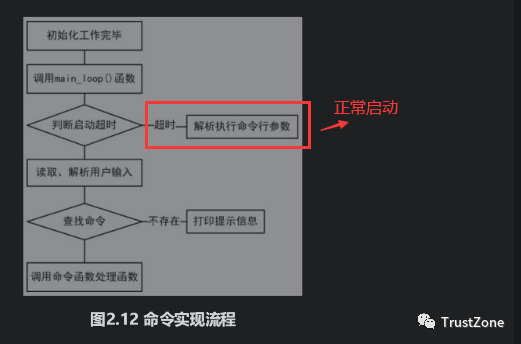
命令處理 main.c中的代碼實現了將一個命令的所有參數分離存放在argv數組中���,參數的數目為arg....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:23
?1196次閱讀
1.啟動延時 如果配置了啟動延遲功能��,U-Boot等待用戶從控制臺(一般為串口)輸入字符��,等待的時間....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:16
?3028次閱讀
zImage內核鏡像下載到開發板之后,可以使用u-boot的go命令進行直接跳轉����,這個時候內核直接解....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:09
?1038次閱讀
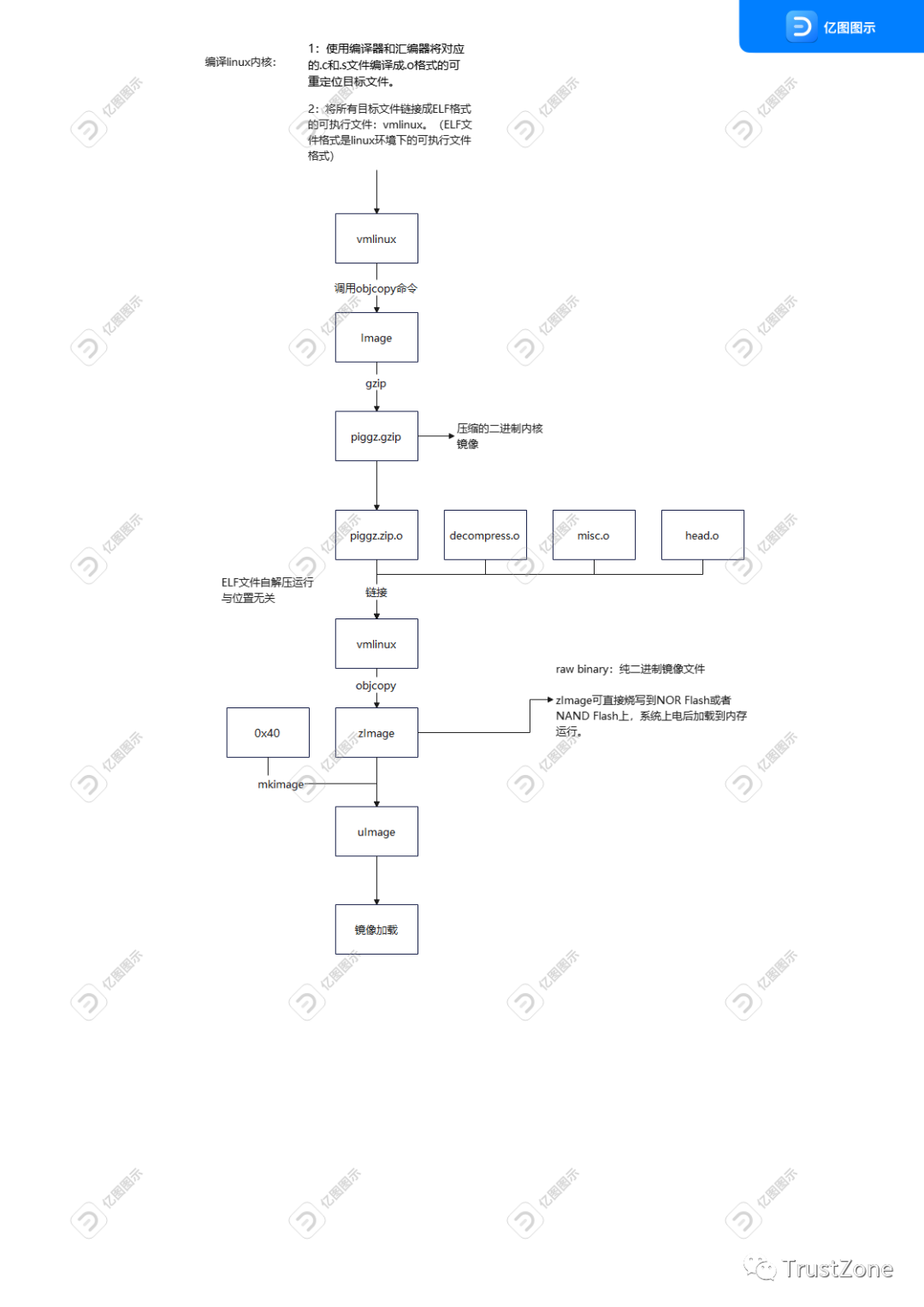
首先我們知道kernel的鏡像最開始是壓縮的zImage格式的存在����,然后Uboot有工具mkimag....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:02
?1014次閱讀
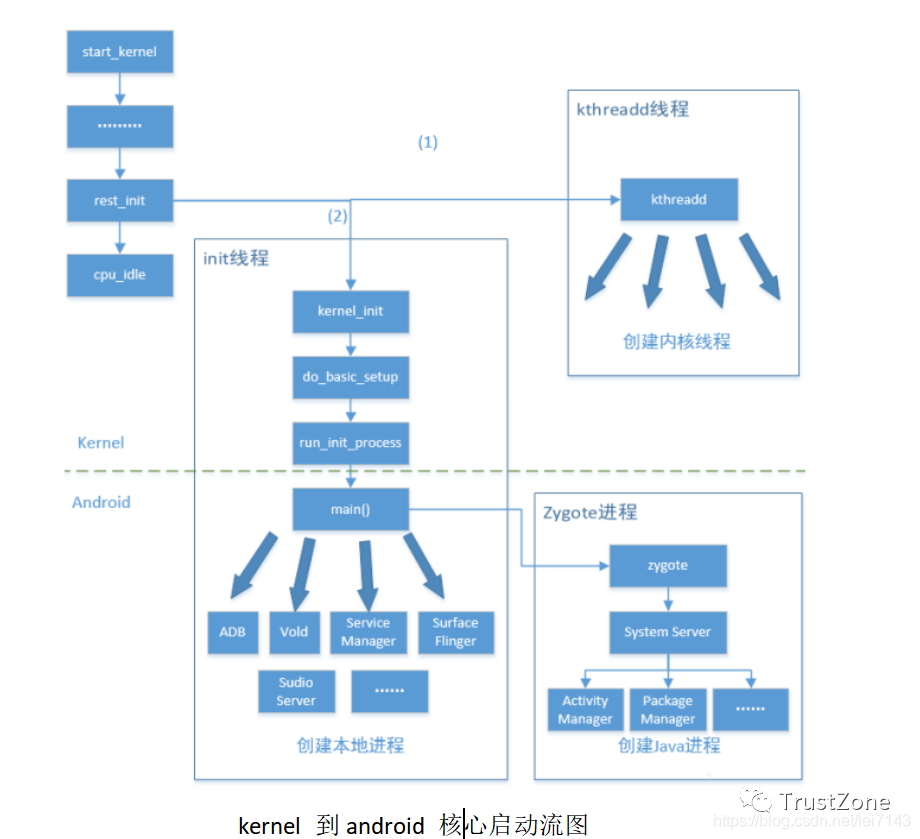
總結一個圖:kernel 到android核心啟動過程 kernel鏡像執行跳轉到start_ker....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 16:59
?2150次閱讀
kernel的啟動主要分為兩個階段�。 1��、階段一 從入口跳轉到start_kernel之前的階段����。 ....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 16:45
?1463次閱讀
相比手機����、電腦等通用平臺,機器人的類型可是千變萬化,構建機器人操作系統的難度就遠比手機和電腦的操作系....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 17:20
?1128次閱讀
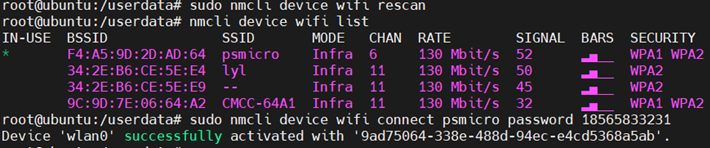
驗證ROS是否安裝成功 按正常來說ROS到這里就安裝完成了,現在我們來驗證一下,輸入以下命令: ro....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 16:51
?10496次閱讀
設置環境變量 輸入下面的這行代碼����,注意到底是melodic還是noetic或者是kinetic是由你....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 16:34
?2641次閱讀
初始化rosdep 輸入以下的命令����,先對其初始化一下 sudo rosdep init 如果出現以下....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 16:22
?2607次閱讀

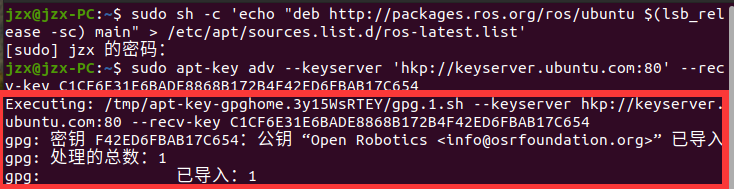
1.添加ROS軟件源 將下面這條命令復制到ubuntu的終端執行 sudo sh -c '. /et....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 16:14
?3502次閱讀
安裝ROS2功能包 接下來����,還有一個很重要的配置,那就是安裝ROS2功能包,我們說TogetherR....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 16:02
?2634次閱讀

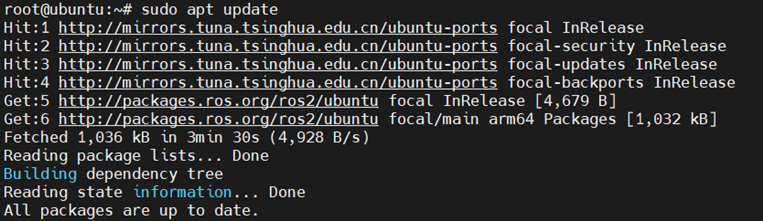
系統更新 第二個配置�,是更新當前旭日X3派所使用的Ubuntu鏡像��,和在電腦上使用的命令相同。 我們....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 15:44
?1762次閱讀
無論是旭日X3派,還是TogetherROS���,在正式使用之前,都還需要進行一些必要的配置,完善必要的....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 15:39
?1108次閱讀
話題接口的定義與使用 話題通信接口的定義也是類似的���,繼續從之前的機器視覺案例中來衍生,我們想把服務換....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 15:32
?2209次閱讀

了解了通信接口的概念,接下來我們再從代碼實現的角度,研究下如何定義以及使用一個接口。 在之前服務概念....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 15:28
?1247次閱讀

ROS通信接口 接口可以讓程序之間的依賴降低,便于我們使用別人的代碼���,也方便別人使用我們的代碼,這就....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 15:03
?1917次閱讀
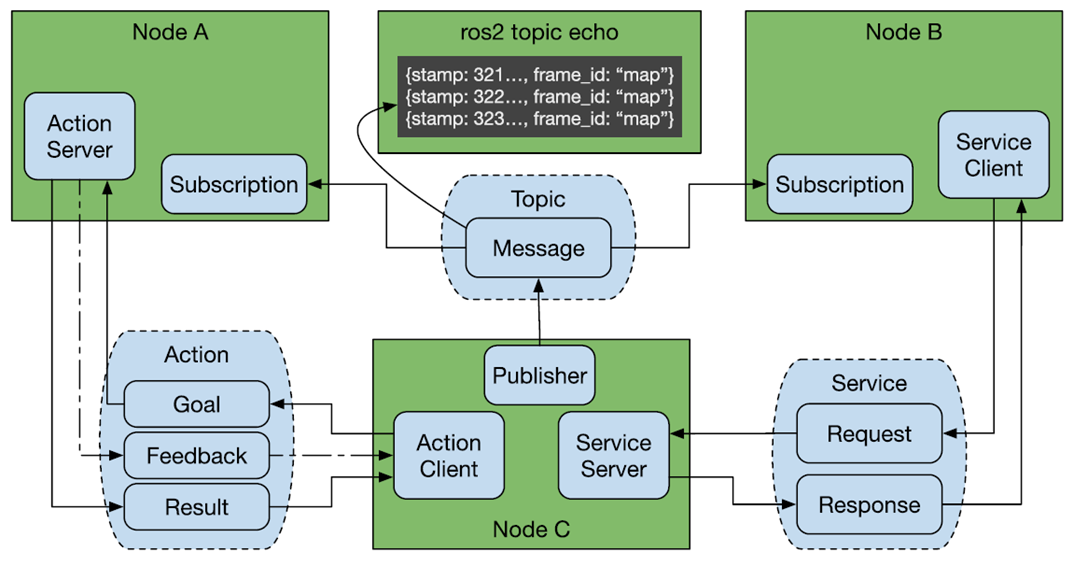
通信接口 在ROS系統中,無論話題還是服務�,或者我們后續將要學習的動作��,都會用到一個重要的概念——通....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 14:59
?1860次閱讀
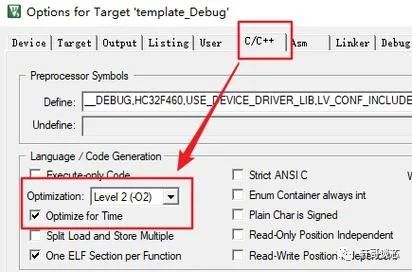
應對分支預測有哪些優化措施 下面再來看一下分支預測�����,這也是 ChatGPT 給出的一個簡易答案 //....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-29 17:32
?1124次閱讀
什么是分支預測 在超標量的流水線架構上����,我們得知�����,CPU 在運行指令的時候�,會在一個時鐘上做多個操作....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-29 17:22
?1811次閱讀
我們拿一個算法的代碼實現來舉例子���,首先我們寫一個求階乘的子函數,這里我偷懶讓 ChatGPT 幫忙生....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-29 17:15
?959次閱讀
一���、H7 的特點 首先看看 M7 內核的 GD32H7都具備哪些不一樣的功能,以下只是我個人關注的點....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-29 16:52
?1736次閱讀

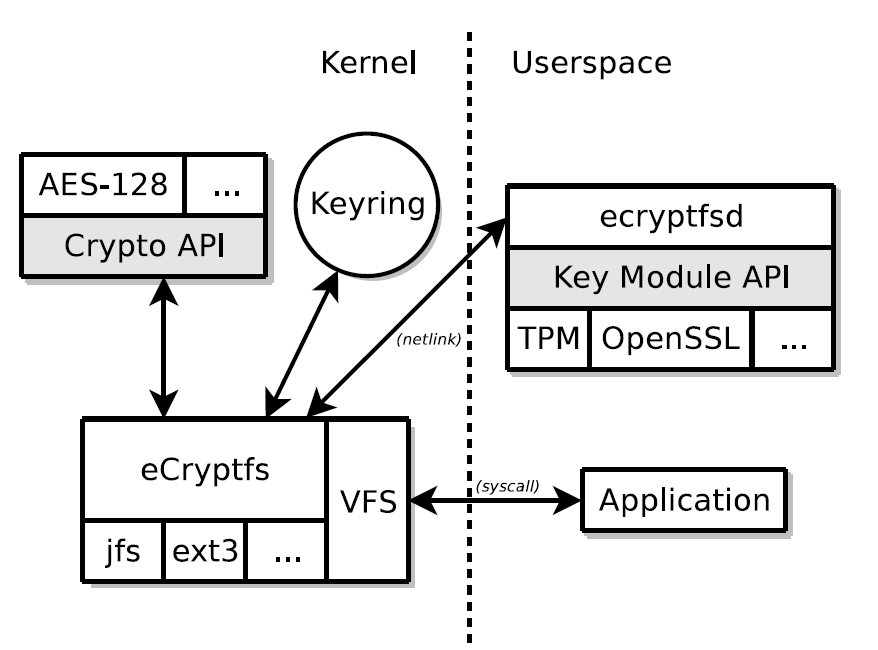
密鑰管理 從上節中我們了解到eCryptfs中核心機制中主要有兩個KEY,即FEKEK和FEK�,前者....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-29 11:46
?1538次閱讀

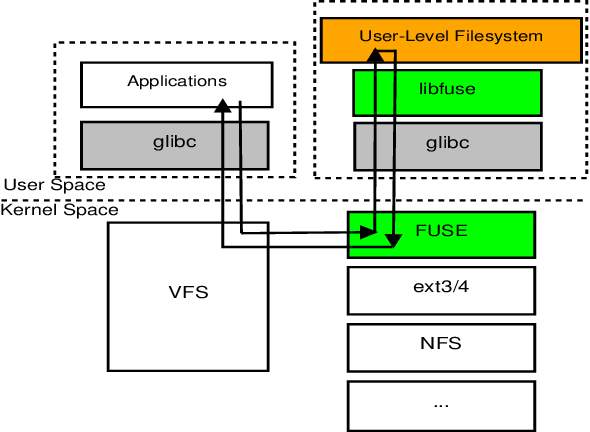
整體架構 eCryptfs整體架構如下圖����,主要是內核模塊eCryptfs以及用戶態進程ecryptf....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-29 11:43
?2071次閱讀
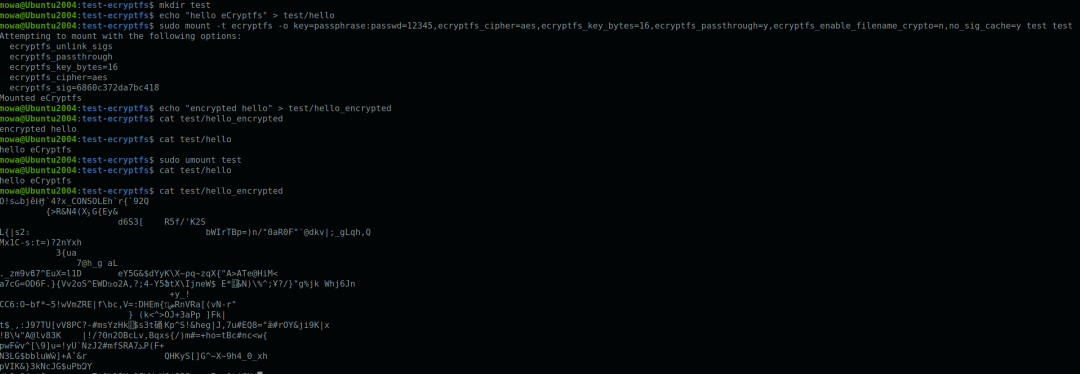
eCryptfs詳解 本章節我們先用簡單用例驗證eCryptfs加密效果特點��,使大家對方案有個整體感....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-29 11:27
?2459次閱讀
Linux系統FBE 從Linux系統軟件架構看�,典型FDE和FBE實現方案分布如下圖���,包括基于dm....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-29 11:23
?2528次閱讀
File-Based Encryption�,又稱Filesystem-Level Encryptio....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-29 11:08
?8348次閱讀





 工商網監
工商網監