") ROS系統(tǒng)的MoveIt模塊介紹
ROS系統(tǒng)的MoveIt模塊介紹

機(jī)器人操作系統(tǒng)ROS目前最受關(guān)注的兩個模塊是導(dǎo)航(Navigation)和機(jī)械臂控制(MoveIt!)。
其中,機(jī)械臂控制模塊(后面簡稱MoveIt)可以讓用戶快速建立機(jī)械臂模型并實現(xiàn)機(jī)械臂的控制(包括建模、運動學(xué)求解、運動規(guī)劃、避障等)。
后續(xù)我將分幾篇博客分別介紹如何一步步使用MoveIt控制自己的機(jī)械臂,算是對以前的學(xué)習(xí)內(nèi)容的記錄和分享。
關(guān)于MoveIt最全面的講解可以參考MoveIt官方網(wǎng)站,推薦大家多參考官方文檔和例程,這里的博文系列權(quán)當(dāng)簡介和入門。
如果用幾個特點來概括MoveIt,主要有:
1.它是屬于ROS系統(tǒng)的一部分,用于控制多關(guān)節(jié)機(jī)械臂;
2.提供了一系列成熟的插件和工具,可以實現(xiàn)機(jī)械臂控制的快速配置;
3.封裝了大量API,方便用戶在MoveIt模塊上進(jìn)行二次開發(fā),進(jìn)而做出更多有意思的應(yīng)用。
這里借用官方經(jīng)典圖例做簡單說明,如下如:
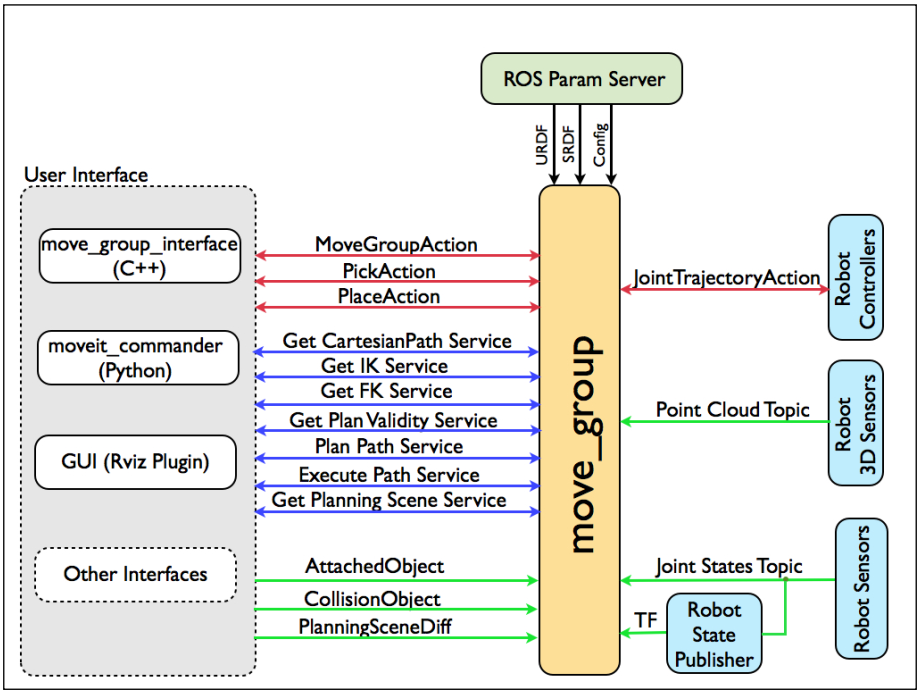
上圖可以看出:
1.MoveIt 的核心節(jié)點(node)為move_group,外圍的幾個部分分別為:ROS Param Server, Robot
Controllers, Robot 3D Sensors, User Interface, Robot Sensors,其中:
ROS Param Server:這部分載入的是用戶定義的模型文件(xacro或urdf)和一些配置文件。(重要)
Robot Controllers:
這部分可以看做是和真正的機(jī)器人部分(硬件控制接口)打交道的部分,即運動規(guī)劃的數(shù)據(jù)由此發(fā)給機(jī)器人驅(qū)動部分,后續(xù)會詳細(xì)講解。(重要)
Robot 3D Sensors: 這部分作用是載入RGB-D相機(jī)或激光雷達(dá)等獲得的點云數(shù)據(jù)用于機(jī)械手的抓取或避障等。
User Interface:這部分是用戶接口,MoveIt提供一系列的API供用戶完成自定義的功能,這里主要。(重要)
Robot Sensors:這部分是接收機(jī)械臂的傳感器數(shù)據(jù),然后預(yù)估出機(jī)器人的狀態(tài)并發(fā)布。
-
模塊
+關(guān)注
關(guān)注
7文章
2837瀏覽量
53289 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222235 -
ROS
+關(guān)注
關(guān)注
1文章
293瀏覽量
18727
發(fā)布評論請先 登錄
使用moveit控制真實機(jī)械臂的方法
【ROS RIKIBOT基礎(chǔ)--使用系列 第一章節(jié)】ROS機(jī)器人硬件系統(tǒng) 精選資料分享
用ros來驅(qū)動6軸手臂
什么是ROS?ROS產(chǎn)生、發(fā)展和壯大的原因和意義
ROS是什么?機(jī)器人操作系統(tǒng)ROS的介紹

ROS的含義與機(jī)器人操作系統(tǒng)ROS的介紹
ROS教程之ROS機(jī)器人操作系統(tǒng)基礎(chǔ)知識概述資料免費下載
機(jī)器人操作系統(tǒng)ROS詳細(xì)介紹
使用 ROS 2 MoveIt 和 NVIDIA Isaac Sim 創(chuàng)建逼真的機(jī)器人模擬
ROS基本介紹

ROS操作系統(tǒng)學(xué)習(xí)筆記3
ROS操作系統(tǒng)學(xué)習(xí)筆記4
使用ROS與Movelt實現(xiàn)myCobot 280運動軌跡規(guī)劃和控制
Unity與ROS鏈接介紹

MoveIt的快速安裝方法



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論