") TogetherROS目標(biāo)檢測運行方法
TogetherROS目標(biāo)檢測運行方法

接下來,我們就運行一個更為直觀的案例——目標(biāo)檢測。
在這個案例中,需要大家找一個USB的相機,連接到旭日X3拍的USB接口上。
在運行這個例程之前,需要確認(rèn)兩點:
1.有一個USB相機已經(jīng)連接到了旭日X3派板子上;
2.有一個HDMI的顯示器也連接到了旭日X3派板子上,它主要用于顯示后續(xù)的圖像檢測的效果。
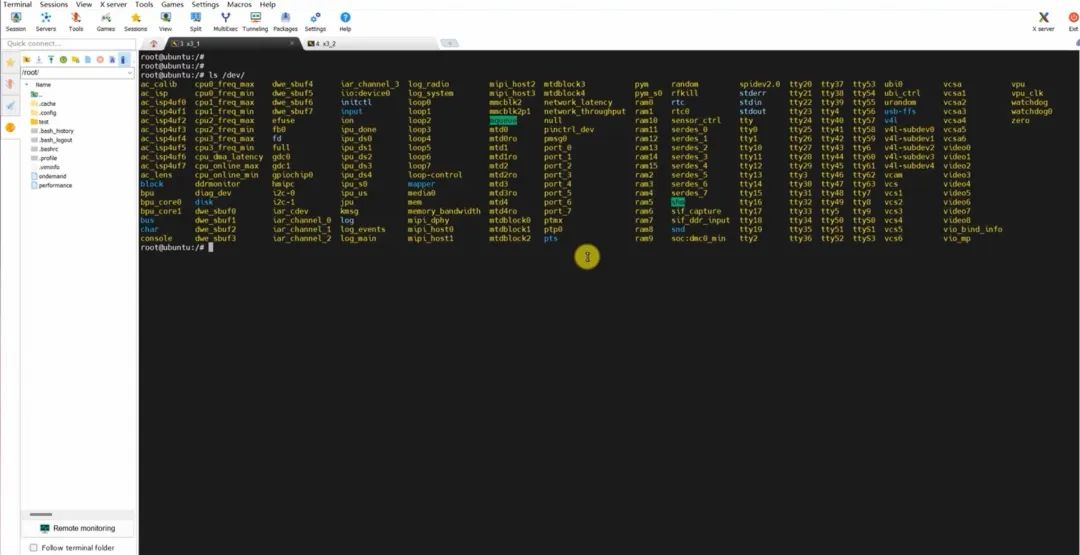
要確認(rèn)USB相機已經(jīng)正確連接到開發(fā)板,可以在終端輸入命令“l(fā)s - dv“查看當(dāng)前設(shè)備號,默認(rèn)把USB相機識別為vedio8。
如果當(dāng)前列表里能找到vedio8就說明相機被成功識別到了。
輸入以下命令運行例程:
** cd /app/ai_inference/02_usb_camera_sample/ ** python3 ./usb_camera_fcos.py
代碼第一行,02例程的功能是通過相機動態(tài)采集圖像,并對圖像里的目標(biāo)物體進(jìn)行實時識別。
代碼第二行,我們用python3來運行例程usb_camera_fcos.py,它的目標(biāo)識別的功能是通過我們板卡中CPU的AI引擎來實現(xiàn)的。
我們輸入以上兩行代碼,就開始驅(qū)動相機、并對相機里的圖像做動態(tài)識別了。
此時如果有連接HDMI的顯示器,就可以在顯示器里看到動態(tài)識別的效果。
我們可以調(diào)整USB相機鏡頭的范圍,去拍一些杯子、電腦、顯示器等等,都可以把對應(yīng)的目標(biāo)物體識別到,并把對應(yīng)的物體用彩色框給框出來;
在框的左上角,就是識別到物體的名稱、以及它識別的概率值了。
-
機器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222279 -
usb
+關(guān)注
關(guān)注
60文章
8440瀏覽量
284546 -
相機
+關(guān)注
關(guān)注
5文章
1578瀏覽量
55808 -
ROS
+關(guān)注
關(guān)注
1文章
293瀏覽量
18740
發(fā)布評論請先 登錄
MATLAB的行人目標(biāo)檢測的方法有哪些?
基于部件的自動目標(biāo)檢測方法研究
運動目標(biāo)檢測方法的對比分析和仿真實現(xiàn)

基于海天線提取的紅外小目標(biāo)檢測方法

基于仿生視覺系統(tǒng)的運動目標(biāo)快速檢測方法

基于GPU的并行化運動目標(biāo)檢測方法的研究

一種非靜止背景下的運動目標(biāo)檢測方法

基于子矩陣波束的目標(biāo)檢測方法
解析在目標(biāo)檢測中怎么解決小目標(biāo)的問題?
基于卷積神經(jīng)網(wǎng)絡(luò)的雷達(dá)目標(biāo)檢測方法綜述
基于改進(jìn)SSD的車輛小目標(biāo)檢測方法

目標(biāo)檢測EDA方法有哪些 eda和pcb的區(qū)別
TogetherROS Bot相機驅(qū)動方法



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論