 深度剖析LMK0480x:低噪聲時鐘抖動清除器的卓越性能與應用實踐
深度剖析LMK0480x:低噪聲時鐘抖動清除器的卓越性能與應用實踐

深度剖析LMK0480x:低噪聲時鐘抖動清除器的卓越性能與應用實踐
在電子設備不斷發展的今天,時鐘信號的穩定性和低抖動特性對于系統性能的影響愈發顯著。LMK0480x系列作為一款高性能的時鐘調節器,以其出色的時鐘抖動清除、生成和分配功能,在眾多領域展現出巨大的應用潛力。本文將深入探討LMK0480x的特點、應用場景、詳細工作原理以及實際應用中的設計要點,希望能為電子工程師們在時鐘設計方面提供有價值的參考。
文件下載:lmk04808.pdf
一、LMK0480x的卓越特性
超低RMS抖動性能
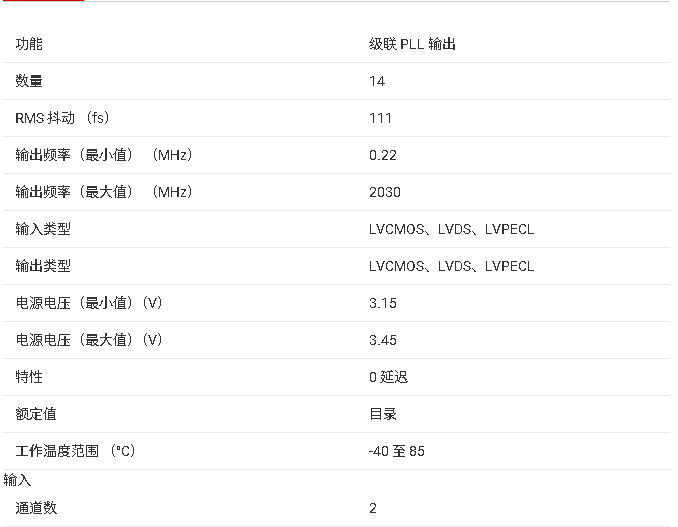
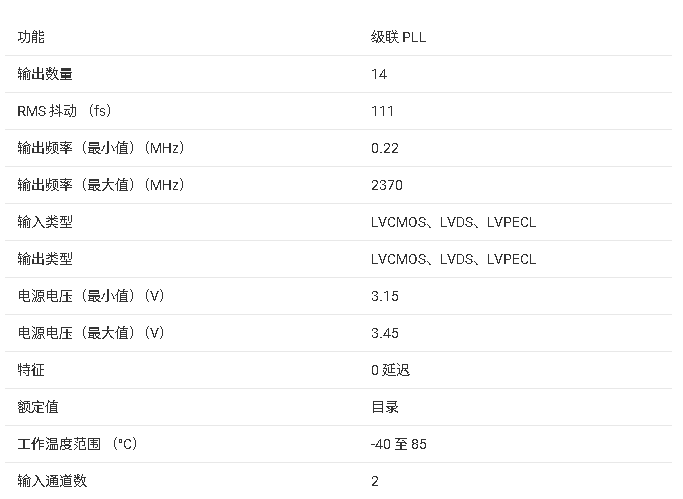
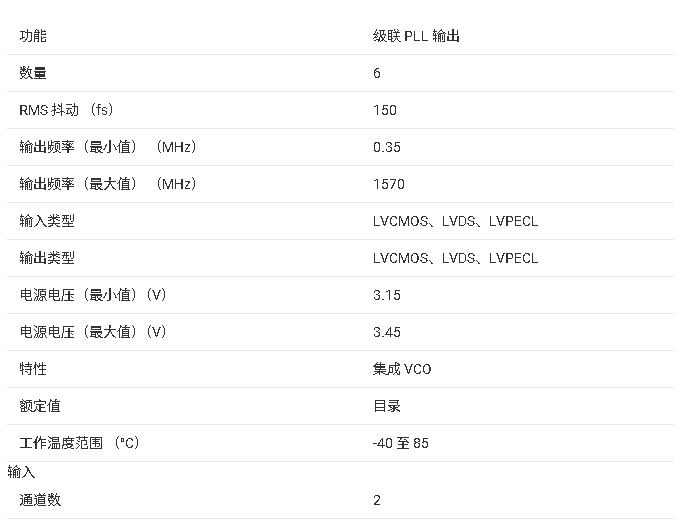
LMK0480x具有令人矚目的超低RMS抖動性能,在12 kHz至20 MHz的頻率范圍內,RMS抖動低至111 fs;在100 Hz至20 MHz的范圍內,RMS抖動為123 fs。這種超低抖動特性能夠有效保證時鐘信號的穩定性,減少信號傳輸過程中的干擾和誤差,對于對時鐘精度要求極高的應用場景至關重要。
雙環PLLatinum?架構
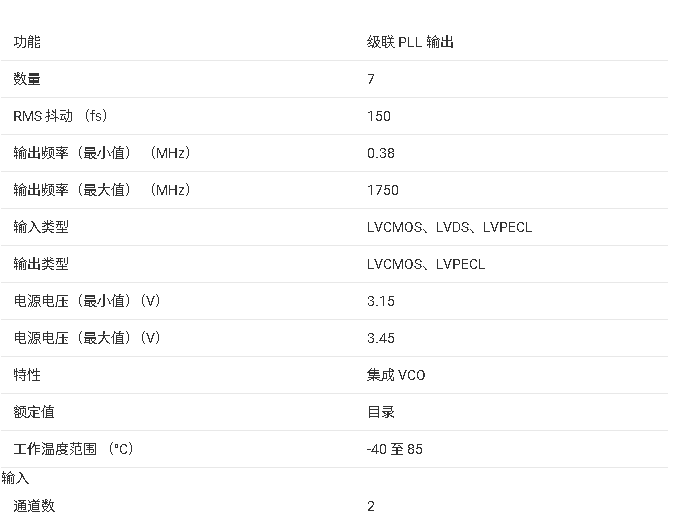
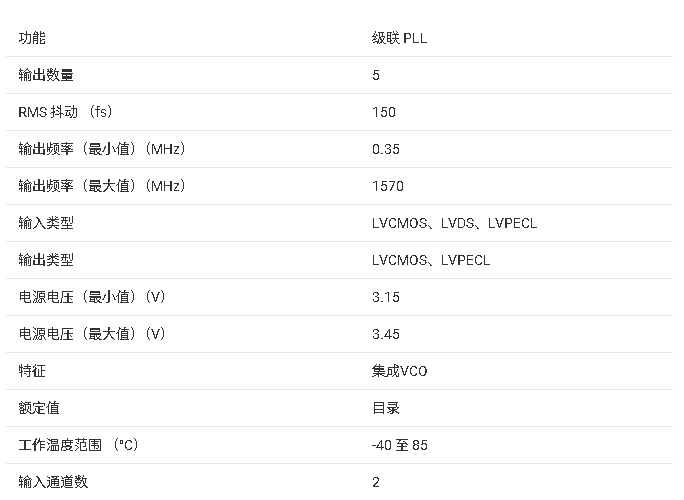
該架構是LMK0480x的核心優勢之一。PLL1集成了低噪聲晶體振蕩器電路,當輸入時鐘丟失時,具備保持模式,并且支持自動或手動觸發/恢復功能。PLL2則擁有歸一化的PLL噪聲底至 -227 dBc/Hz,鑒相器速率高達155 MHz,還具備OSCin頻率倍增器和集成低噪聲VCO等特性。雙環架構使得LMK0480x能夠在不同的工作模式下靈活應對,滿足多樣化的應用需求。
豐富的輸入輸出配置
LMK0480x提供2個冗余輸入時鐘,并帶有LOS檢測功能,支持自動和手動切換模式。其輸出配置也十分靈活,具有50%占空比輸出分頻,范圍從1到1045(偶數和奇數均可),擁有12個LVPECL、LVDS或LVCMOS可編程輸出,以及14個差分輸出(最多可轉換為26個單端輸出),其中包括最多6個VCXO/晶體緩沖輸出。此外,還具備數字延遲(固定或動態可調)和25 ps步進的模擬延遲控制功能,時鐘速率最高可達1536 MHz,并且支持0延遲模式和上電時的三個默認時鐘輸出。
多模式工作能力
支持雙PLL、單PLL和時鐘分配等多種工作模式,能夠適應不同的系統架構和應用需求。同時,其工業溫度范圍為 -40至85°C,工作電壓為3.15 - 3.45 V,具備良好的環境適應性和穩定性。
二、廣泛的應用領域
數據轉換器時鐘
在數據轉換器中,精確的時鐘信號對于數據的采樣和轉換至關重要。LMK0480x的超低抖動性能能夠確保數據轉換器獲得穩定、準確的時鐘信號,從而提高數據轉換的精度和質量。
無線基礎設施
無線通信系統對時鐘信號的穩定性和準確性要求極高。LMK0480x可以為無線基站、收發信機等設備提供高質量的時鐘信號,保證無線通信的可靠性和高效性。
網絡、SONET/SDH、DSLAM
在網絡通信領域,時鐘信號的同步和穩定性直接影響數據的傳輸速率和質量。LMK0480x的多模式工作能力和豐富的輸入輸出配置,能夠滿足不同網絡設備的時鐘需求,確保網絡的穩定運行。
醫療、視頻、軍事、航空航天
這些領域對設備的可靠性和性能要求極為嚴格。LMK0480x的高性能和高穩定性使其成為這些領域中時鐘設計的理想選擇,能夠為醫療設備的精確檢測、視頻系統的高清顯示、軍事和航空航天設備的可靠運行提供有力保障。
測試和測量
在測試和測量設備中,精確的時鐘信號是保證測量結果準確性的關鍵。LMK0480x的超低抖動和高精度特性,能夠為測試和測量設備提供可靠的時鐘源,提高測量的精度和可靠性。
三、深入解析工作原理
系統架構
LMK0480x的雙環PLL架構為其提供了在寬范圍的輸出頻率和相位噪聲積分帶寬內實現最低抖動性能的能力。PLL1由外部參考時鐘驅動,使用外部VCXO或可調晶體為PLL2提供頻率準確、低相位噪聲的參考時鐘。PLL1通常采用較窄的環路帶寬(10 Hz至200 Hz),以保留參考時鐘輸入信號的頻率準確性,同時抑制參考時鐘在傳輸過程中可能積累的高頻相位噪聲。PLL2則利用PLL1提供的低相位噪聲參考,采用較寬的環路帶寬(50 kHz至200 kHz),充分發揮內部VCO在高頻相位噪聲方面的優勢,從而實現整體的超低抖動性能。
主要模塊功能
- PLL1冗余參考輸入:具有兩個參考時鐘輸入CLKin0和CLKin1,通過Ref Mux進行選擇,支持自動或手動切換。輸入預分頻器的設置使得在自動切換參考輸入時,無需重新編程PLL1的R分頻器,保證了系統的穩定性和靈活性。
- PLL1可調晶體支持:集成了晶體振蕩器,可與外部晶體和變容二極管配合使用,實現抖動清除功能。通過編程啟用晶體模式,能夠進一步優化時鐘信號的質量。
- VCXO/晶體緩沖輸出:提供2個專用輸出,是PLL2參考輸入的緩沖副本。這些輸出可以在LMK0480x編程之前為外部設備(如微控制器、FPGA、CPLD等)提供時鐘信號。OSCout0的緩沖輸出類型可編程為LVDS、LVPECL或LVCMOS,OSCout1固定為LVPECL。通過編程OSC分頻器,這些輸出可以輸出低于VCXO或晶體頻率的頻率。
- 時鐘分配:共有12個由內部或外部VCO驅動的輸出,所有VCO驅動的輸出類型均可編程為LVPECL、LVDS或LVCMOS。當所有分配輸出配置為LVCMOS或單端LVPECL時,最多可提供24個輸出。此外,還可以將兩個時鐘輸出組編程為由OSCin驅動,從而使最多6個差分輸出成為OSCin的緩沖輸出。
四、應用設計要點
環路濾波器設計
每個PLL都需要一個專用的環路濾波器。PLL1的環路濾波器應連接到CPout1引腳,推薦的總閉環帶寬范圍為10 Hz至200 Hz。PLL2的電荷泵直接連接到可選的內部環路濾波器組件,設計時需要考慮VCO的Kvco值在不同調諧頻率下的變化,以確保環路在整個應用調諧范圍內的穩定性。可以使用TI的時鐘設計工具和時鐘架構工具來輔助設計和模擬環路濾波器。
輸入輸出驅動和端接
在驅動CLKin和OSCin輸入時,需要根據輸入信號的類型(差分或單端)選擇合適的輸入模式和耦合方式。當使用差分參考時鐘時,建議將輸入模式設置為雙極型(CLKinX_BUF_TYPE = 0),并進行AC耦合。在端接時鐘輸出時,應遵循傳輸線理論,進行良好的阻抗匹配,以防止反射。不同的輸出類型(LVDS、LVPECL、LVCMOS)需要采用不同的端接和耦合方法,以確保接收器在最佳的DC電壓(共模電壓)下工作。
頻率規劃
計算LMK0480x的輸出分頻值相對簡單。首先計算時鐘輸出頻率的最小公倍數(LCM),然后確定支持目標時鐘輸出頻率的VCO范圍,根據VCO頻率確定時鐘輸出分頻值,最后根據OSCin VCXO或晶體頻率和VCO頻率確定PLL2_P、PLL2_N和PLL2_R分頻值。在大多數應用中,建議繞過VCO分頻器。
PLL編程
為了使PLL鎖定,需要確保參考分頻和VCO或VCXO的反饋分頻產生相同的鑒相器頻率。根據設備的工作模式,不同的分頻結構會影響PLL的相位檢測器頻率。在編程時,需要根據具體的應用需求和輸入輸出頻率要求,合理設置各個分頻器的值。
數字鎖檢測頻率精度
數字鎖檢測電路用于確定PLL1鎖定、PLL2鎖定和保持退出事件。通過編程窗口大小和鎖定計數寄存器,可以設置PLL參考信號和反饋信號的ppm頻率精度,以觸發相應的事件。在使用保持功能時,正確設置這些寄存器的值對于確保系統的穩定性和可靠性至關重要。
動態數字延遲計算
動態數字延遲允許在不中斷或最小化中斷時鐘輸出的情況下調整兩個或多個時鐘輸出之間的時間偏移。通過計算數字延遲值,可以實現時鐘輸出的相位調整。在調整數字延遲時,需要注意最小時間調整步長等于時鐘分配路徑周期的一半,并且要根據時鐘頻率和所需的相位偏移來計算相應的數字延遲值。
五、電源和布局建議
電源建議
所有Vcc引腳必須始終連接。不同的Vcc引腳具有不同的內部電容和功能,在設計時需要根據具體情況進行合理的去耦和旁路處理。例如,對于CLKout的Vcc引腳,可以使用鐵氧體磁珠來減少不同時鐘輸出頻率之間的串擾,但在使用低頻輸出和高電流開關時鐘輸出格式時,需要考慮去除鐵氧體磁珠或添加局部電容以支持開關電流。對于PLL1和PLL2的電荷泵Vcc引腳,需要根據應用情況選擇是否使用鐵氧體磁珠,并合理添加電容來優化電源性能。
布局建議
由于LMK0480x的功耗較高,需要重視熱管理。通過在PCB上設計包含多個過孔到接地層的熱焊盤圖案,將封裝的暴露焊盤焊接到PCB上,可以最大限度地提高散熱效率。同時,在布局時應避免在暴露接地焊盤附近布線,以確保PCB上的熱流順暢。對于CLKin和OSCin路徑,差分輸入應緊密耦合布線;時鐘輸出的差分信號也應緊密耦合,以減少PCB上的串擾。
六、總結
LMK0480x作為一款高性能的時鐘調節器,憑借其超低抖動性能、雙環PLL架構、豐富的輸入輸出配置和多模式工作能力,在數據轉換器、無線基礎設施、網絡通信等眾多領域具有廣泛的應用前景。在實際應用設計中,需要根據具體的應用需求,合理設計環路濾波器、輸入輸出驅動和端接、頻率規劃、PLL編程等方面,并注意電源和布局的優化,以充分發揮LMK0480x的性能優勢,實現系統的穩定運行和高性能表現。希望本文能夠為電子工程師們在使用LMK0480x進行時鐘設計時提供有益的參考和指導。
你在使用LMK0480x的過程中遇到過哪些問題?或者對于本文提到的設計要點,你有什么不同的見解和經驗?歡迎在評論區分享交流!
-
應用設計
+關注
關注
0文章
278瀏覽量
8637 -
LMK0480X
+關注
關注
0文章
6瀏覽量
7566
發布評論請先 登錄




 工商網監
工商網監
評論