") 重磅更新 | 先楫半導(dǎo)體HPM_APPS v1.10.1發(fā)布
重磅更新 | 先楫半導(dǎo)體HPM_APPS v1.10.1發(fā)布

文檔路徑
本地路徑:
English: hpm_apps/docs/index.html
中文: hpm_apps/docs/index_zh.html
在線文檔:
Englist//hpm-apps.readthedocs.io/en/latest/
中文:
https://hpm-apps.readthedocs.io/zh-cn/latest/
代碼倉(cāng)庫(kù)
hpm_apps:
github: https://github.com/hpmicro/hpm_apps
gitee: https://gitee.com/hpmicro/hpm_apps
hpm_sdk
github: https://github.com/hpmicro/hpm_sdk
gitee: https://gitee.com/hpmicro/hpm_sdk
重要提示:每個(gè) HPM_APPS 應(yīng)用示例均需特定版本的 HPM_SDK 支持,請(qǐng)務(wù)必查閱對(duì)應(yīng)示例目錄中的 README 文件確認(rèn)所需 SDK 版本。
1. 離線即控:基于HPM5E00 RISC-V的嵌入式Web控制方案
概述
HPM5E00EVK Web 控制系統(tǒng)是一款基于HPMicro HPM5E00 RISC-V 微控制器的嵌入式Web服務(wù)器解決方案。該方案創(chuàng)新地利用USB RNDIS虛擬網(wǎng)卡技術(shù),使得開(kāi)發(fā)板僅通過(guò)一根USB線連接電腦,即可在瀏覽器中訪問(wèn)并實(shí)時(shí)控制外設(shè),無(wú)需依賴任何外部網(wǎng)絡(luò)或Wi?Fi模塊,極大降低了調(diào)試與交互的門(mén)檻。

核心特性
USB RNDIS 虛擬網(wǎng)卡—— 即插即用,將USB轉(zhuǎn)換為虛擬以太網(wǎng)接口,無(wú)需手動(dòng)配置IP
內(nèi)置輕量Web服務(wù)器—— 基于Mongoose實(shí)現(xiàn),支持HTTP/WebSocket,響應(yīng)迅速
實(shí)時(shí)圖形化控制界面—— 采用Preact構(gòu)建現(xiàn)代化交互UI,操作直觀流暢
數(shù)字量輸入監(jiān)測(cè)—— 實(shí)時(shí)展示6路按鍵狀態(tài),支持狀態(tài)變化提示
數(shù)碼管遠(yuǎn)程控制—— 通過(guò)網(wǎng)頁(yè)直接控制8段數(shù)碼管顯示內(nèi)容
RESTful API接口—— 提供標(biāo)準(zhǔn)化API,便于二次集成與自動(dòng)化測(cè)試
技術(shù)架構(gòu)
- 后端 (web_server/)
-網(wǎng)絡(luò)協(xié)議棧: LwIP (輕量級(jí)TCP/IP協(xié)議棧)
-USB協(xié)議: CherryUSB RNDIS設(shè)備類
-Web服務(wù)器: Mongoose (嵌入式HTTP服務(wù)器)
-外設(shè)控制: EUI (擴(kuò)展用戶接口) 驅(qū)動(dòng)驅(qū)動(dòng)數(shù)碼管和按鍵矩陣
前端 (web_app/)
-框架: Preact (輕量級(jí)React替代方案, 資源占用極低)
-構(gòu)建工具: Vite
-樣式: Tailwind CSS, 保持界面簡(jiǎn)介美觀
-部署方式: 前端資源經(jīng)編譯后轉(zhuǎn)為C數(shù)組,直接嵌入固件,無(wú)需額外文件系統(tǒng)
方案價(jià)值
該方案為嵌入式設(shè)備提供了低成本、高互動(dòng)性、部署極簡(jiǎn)的人機(jī)交互與本地控制方案。
它摒棄了額外的網(wǎng)絡(luò)模塊與復(fù)雜配置,僅憑一根USB線連接,即可在瀏覽器中實(shí)現(xiàn)完整的圖形化監(jiān)控與操控,是傳統(tǒng)串口終端向現(xiàn)代Web交互的平滑升級(jí)。
典型應(yīng)用場(chǎng)景包括:
輕量級(jí)工業(yè)網(wǎng)關(guān)/邊緣控制器:在無(wú)外部網(wǎng)絡(luò)的工業(yè)現(xiàn)場(chǎng),通過(guò)USB直連快速配置參數(shù)、查看設(shè)備狀態(tài)與診斷數(shù)據(jù)。
智能家居網(wǎng)關(guān)或本地中控:作為家居設(shè)備的本地管理界面,實(shí)現(xiàn)離線式的設(shè)備控制與場(chǎng)景設(shè)置,保障隱私與響應(yīng)速度。
教學(xué)實(shí)驗(yàn)與原型開(kāi)發(fā):為學(xué)生和開(kāi)發(fā)者提供直觀、即時(shí)的硬件交互體驗(yàn),大幅降低學(xué)習(xí)與調(diào)試門(mén)檻。
設(shè)備現(xiàn)場(chǎng)調(diào)試與維護(hù):工程師無(wú)需攜帶專用軟件或串口工具,通過(guò)任意電腦瀏覽器即可完成維護(hù)操作。
該方案將復(fù)雜的技術(shù)封裝為簡(jiǎn)單的用戶體驗(yàn),為設(shè)備賦予了“即插即用”的Web智能,是連接物理世界與數(shù)字交互的輕巧而高效的橋梁。
2. 微秒級(jí)硬轉(zhuǎn)發(fā):基于HPM6E TSN的工業(yè)級(jí)環(huán)網(wǎng)通信方案
概述
本方案基于HPMicro HPM6E系列芯片的時(shí)間敏感網(wǎng)絡(luò)(TSN)功能,通過(guò)其內(nèi)置的CB(Cut?Through Bridging)協(xié)議與硬件交換(Switch)引擎,實(shí)現(xiàn)了高效的環(huán)網(wǎng)通信與微秒級(jí)硬件轉(zhuǎn)發(fā),為工業(yè)控制、車載網(wǎng)絡(luò)等高實(shí)時(shí)性場(chǎng)景提供了可靠的通信基礎(chǔ)。
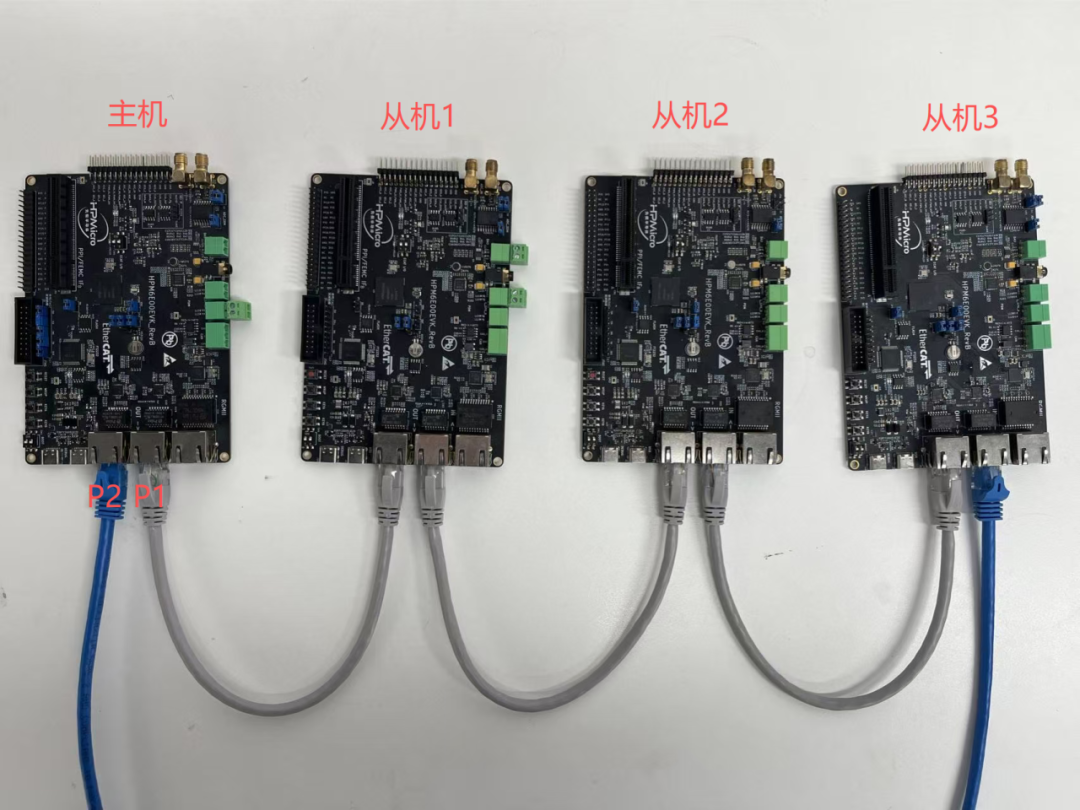
環(huán)網(wǎng)組網(wǎng)拓?fù)浣Y(jié)構(gòu):
方案說(shuō)明
1. 網(wǎng)絡(luò)角色與組網(wǎng)
系統(tǒng)由一個(gè)主機(jī)與多個(gè)從機(jī)組成,所有設(shè)備均采用HPM6E00EVK開(kāi)發(fā)板。
通過(guò)網(wǎng)線將各設(shè)備的 IN 與 OUT 網(wǎng)口依次串聯(lián),形成物理環(huán)網(wǎng)。
每個(gè)設(shè)備具有唯一MAC地址與同一網(wǎng)段下的唯一IP地址。
2. 通信配置
主機(jī)運(yùn)行 UDP Server,綁定任意地址(IP_ADDR_ANY),端口可配置。
從機(jī)運(yùn)行 UDP Client,端口可固定或動(dòng)態(tài)分配。
3. TSN 端口與轉(zhuǎn)發(fā)策略
HPM6E芯片的TSN模塊包含三個(gè)外部端口(P1、P2)與一個(gè)內(nèi)部端口(CPU端口)。開(kāi)發(fā)板上的 IN、OUT 網(wǎng)口分別對(duì)應(yīng)P1與P2。
主機(jī)配置:
- 廣播幀從內(nèi)部端口轉(zhuǎn)發(fā)
- 未知幀從P1、P2轉(zhuǎn)發(fā)
- 查表匹配本機(jī)MAC的幀從內(nèi)部端口進(jìn)入CPU
- 內(nèi)部幀禁止轉(zhuǎn)發(fā)
從機(jī)配置:
- 廣播幀與未知幀均從P1、P2轉(zhuǎn)發(fā)
- 匹配本機(jī)MAC的幀進(jìn)入內(nèi)部端口
- 內(nèi)部幀禁止轉(zhuǎn)發(fā)
該策略實(shí)現(xiàn) ARP單向傳輸,杜絕廣播風(fēng)暴,并有效降低CPU負(fù)載。
4. CB 協(xié)議與硬件去重
發(fā)送時(shí),CB功能自動(dòng)為數(shù)據(jù)幀添加 r?tag,并同時(shí)從兩個(gè)外部端口發(fā)出。
接收時(shí),交換引擎自動(dòng)識(shí)別并丟棄重復(fù)幀,確保CPU僅接收唯一有效數(shù)據(jù),避免處理冗余。
5. 通信流程
上電后,從機(jī)主動(dòng)發(fā)送一幀數(shù)據(jù)至主機(jī)。
主機(jī)記錄從機(jī)IP與端口(最大支持16臺(tái)從機(jī)),并通知從機(jī)停止主動(dòng)發(fā)送。
主機(jī)啟動(dòng)定時(shí)中斷(默認(rèn)1ms周期),主動(dòng)向所有已注冊(cè)從機(jī)發(fā)送數(shù)據(jù)。
6. 狀態(tài)指示與性能測(cè)量
從機(jī)每接收 1000幀數(shù)據(jù),RGB LED狀態(tài)切換一次,直觀反映通信速率。
實(shí)測(cè) 主機(jī)→從機(jī)3 端到端延遲約為 21μs,包含3次轉(zhuǎn)發(fā)延遲、線纜傳輸延遲及MCU處理時(shí)間。
方案優(yōu)勢(shì)
微秒級(jí)硬件轉(zhuǎn)發(fā):依托TSN交換引擎,實(shí)現(xiàn)確定性的低延遲通信
高可靠性環(huán)網(wǎng):基于CB協(xié)議的冗余發(fā)送與硬件去重,提升通信魯棒性
抑制廣播風(fēng)暴:通過(guò)精細(xì)的轉(zhuǎn)發(fā)規(guī)則設(shè)計(jì),杜絕環(huán)路廣播泛濫
CPU負(fù)載低:硬件處理大部分轉(zhuǎn)發(fā)與過(guò)濾,釋放CPU資源
即插即用組網(wǎng):物理接線簡(jiǎn)單,無(wú)需復(fù)雜網(wǎng)絡(luò)配置
典型應(yīng)用場(chǎng)景
工業(yè)自動(dòng)化控制網(wǎng)絡(luò)(如PLC環(huán)網(wǎng))
軌道交通車載通信系統(tǒng)
電力保護(hù)與采集環(huán)網(wǎng)
機(jī)器人實(shí)時(shí)協(xié)同通信
高可靠物聯(lián)網(wǎng)邊緣網(wǎng)關(guān)
3. 輕量而強(qiáng)大:基于HPMicro MCU的EtherCAT主站解決方案
概述
本方案介紹基于 先楫半導(dǎo)體HPMicro MCU 與開(kāi)源 CherryECAT 主站協(xié)議棧,實(shí)現(xiàn)的高性能、輕量化EtherCAT主站解決方案。該方案在保持極低資源占用的同時(shí),實(shí)現(xiàn)了優(yōu)異的實(shí)時(shí)性與豐富的協(xié)議支持,為工業(yè)運(yùn)動(dòng)控制、實(shí)時(shí)IO等場(chǎng)景提供高性價(jià)比的EtherCAT主站實(shí)現(xiàn)路徑。
方案特性
1. 極致的資源優(yōu)化
RAM占用:約 4 KB
Flash占用:約 40 KB(含24KB主站代碼 + 16KB Shell命令及日志)
適合資源緊張的嵌入式場(chǎng)景,降低硬件成本。
2. 高效的傳輸機(jī)制
異步隊(duì)列傳輸:?jiǎn)未蝹鬏斂蓴y帶多個(gè)EtherCAT Datagram,提升總線利用率。
零拷貝技術(shù):直接使用ENET收發(fā)緩沖區(qū)進(jìn)行協(xié)議數(shù)據(jù)填充與解析,減少內(nèi)存復(fù)制開(kāi)銷,提升實(shí)時(shí)性。
3. 完善的協(xié)議與功能支持
拓?fù)渥詣?dòng)發(fā)現(xiàn):支持熱插拔,自動(dòng)掃描總線并更新從站拓?fù)渑c信息。
從站狀態(tài)自動(dòng)監(jiān)控:實(shí)時(shí)監(jiān)測(cè)從站運(yùn)行狀態(tài)。
分布式時(shí)鐘(DC):支持時(shí)鐘同步,為高精度協(xié)同控制提供基礎(chǔ)。
多種通信服務(wù):
- CANopen over EtherCAT (CoE)
- File over EtherCAT (FoE)
- Ethernet over EtherCAT (EoE)
配置與診斷:
- 從站SII(Slave Information Interface)讀寫(xiě)
- 從站寄存器讀寫(xiě)
- 支持多主站架構(gòu)
4. 卓越的實(shí)時(shí)性能
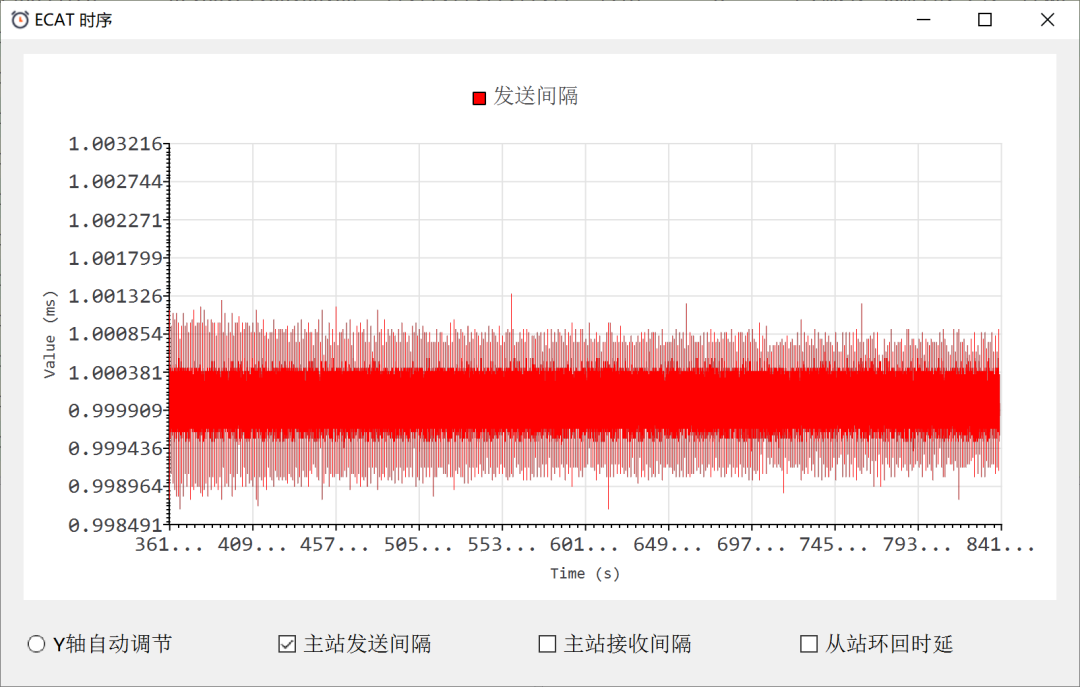
最小PDO循環(huán)周期 < 40 μs(實(shí)際性能受主/從站硬件影響)
分布式時(shí)鐘同步抖動(dòng) < 3 μs(實(shí)際性能受主/從站硬件影響)
下圖為HPM6800EVK(運(yùn)行于Flash XIP模式)實(shí)測(cè)的DC同步抖動(dòng)表現(xiàn),穩(wěn)定維持在3μs以內(nèi):
方案核心優(yōu)勢(shì)
輕量高效:在極小的內(nèi)存與存儲(chǔ)空間內(nèi)實(shí)現(xiàn)全功能EtherCAT主站。
實(shí)時(shí)性強(qiáng):憑借零拷貝、隊(duì)列傳輸?shù)葍?yōu)化,實(shí)現(xiàn)微秒級(jí)循環(huán)周期與低抖動(dòng)。
穩(wěn)定可靠:支持熱插拔、狀態(tài)監(jiān)控與豐富的診斷功能,符合工業(yè)應(yīng)用需求。
易于集成:基于開(kāi)源CherryECAT棧,配套命令行交互工具(參考IgH),便于開(kāi)發(fā)調(diào)試與二次集成。
典型應(yīng)用場(chǎng)景
工業(yè)機(jī)器人運(yùn)動(dòng)控制器
數(shù)控系統(tǒng)(CNC)
包裝機(jī)械
印刷設(shè)備
其他對(duì)實(shí)時(shí)性、同步性要求高的多軸協(xié)同控制領(lǐng)域
4. 【重磅升級(jí)】HPMicro Monitor V2 上線:速度提升10倍,功能全面增強(qiáng),嵌入式調(diào)試從此大不同
在電機(jī)驅(qū)動(dòng)、數(shù)字電源或任何嵌入式動(dòng)態(tài)系統(tǒng)的開(kāi)發(fā)中,你是否曾為無(wú)法實(shí)時(shí)捕捉關(guān)鍵變量的瞬息變化而困擾?是否渴望擁有一種如同軟件調(diào)試般直觀、卻又能深入硬件底層的觀察能力?
今天,我們正式推出 HPMicro Monitor V2 —— 一個(gè)為高效硬件調(diào)試而生的嵌入式實(shí)時(shí)變量監(jiān)控服務(wù)。它不僅是工具,更是您洞察系統(tǒng)運(yùn)行、加速問(wèn)題定位的“第三只眼”。
V2 重磅升級(jí):為何說(shuō)是“飛躍”?
性能飆升:得益于全新的流式(Stream)與緩沖(Buffer)采樣模式,采用硬件定時(shí)器(GPTMR)與DMA協(xié)同工作,實(shí)現(xiàn)了采樣性能的數(shù)量級(jí)提升,滿足您對(duì)高頻信號(hào)(如電流環(huán)、PWM)的捕捉需求。
功能全面增強(qiáng):在保留輕量、易集成特性的基礎(chǔ)上,新增用戶自定義上報(bào)通道,讓您能在代碼任意關(guān)鍵位置(如中斷服務(wù)例程中)手動(dòng)插入采樣點(diǎn),確保無(wú)一關(guān)鍵數(shù)據(jù)遺漏。
體驗(yàn)優(yōu)化:配合全新升級(jí)的 HPMicro Monitor Studio 上位機(jī)軟件,提供更直觀的波形展示、更靈活的數(shù)據(jù)分析與更流暢的交互體驗(yàn)。
它是什么?
簡(jiǎn)單來(lái)說(shuō),HPMicro Monitor 是一個(gè)運(yùn)行在您設(shè)備上的輕量級(jí)服務(wù)。它通過(guò)極簡(jiǎn)的通信協(xié)議,將設(shè)備內(nèi)部的全局變量實(shí)時(shí)映射到電腦屏幕上,讓您像使用示波器觀察電壓一樣,觀察任何您關(guān)心的數(shù)據(jù)變化。
效果預(yù)覽:
核心價(jià)值:為什么您需要它?
1.告別“盲調(diào)”與“打印”:無(wú)需再依賴斷點(diǎn)(破壞時(shí)序)或串口打印(效率低下),實(shí)現(xiàn)真正非侵入式的實(shí)時(shí)監(jiān)控。
2.極速集成,零侵入:僅需調(diào)用 monitor_init() 和 monitor_handle() 兩個(gè)接口,無(wú)需改動(dòng)您原有工程的任何業(yè)務(wù)邏輯。
3.資源占用低:通信采用DMA,獨(dú)立內(nèi)存池,對(duì)主程序運(yùn)行影響微乎其微。
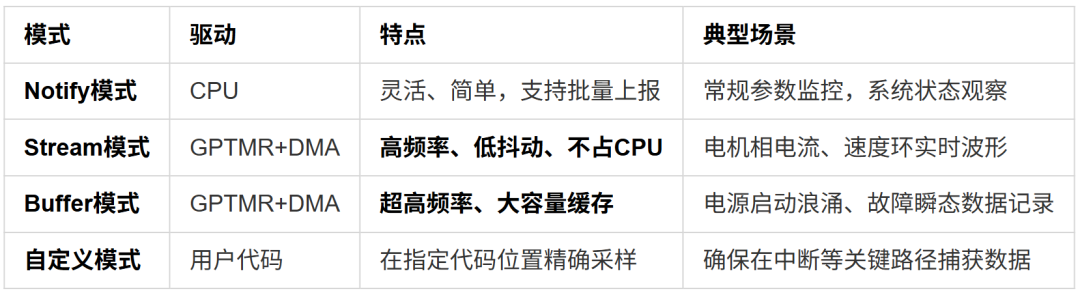
4.場(chǎng)景全覆蓋:從常規(guī)變量查看,到電機(jī)控制的高頻電流采樣,再到電源啟動(dòng)的瞬態(tài)捕獲,提供四種模式應(yīng)對(duì)所有需求。
四種采樣模式,解鎖全場(chǎng)景調(diào)試
5. 實(shí)時(shí)采集、高效傳輸:基于HPM6300與HPM_MONITOR的高性能ADC監(jiān)控方案
你是否曾希望像調(diào)試軟件一樣,實(shí)時(shí)觀察硬件引腳上的模擬信號(hào)變化?是否想過(guò)不依賴昂貴儀器,僅用一塊開(kāi)發(fā)板就能捕捉高頻波形?
今天,我們帶來(lái)HPM_MONITOR + ADC 高性能數(shù)據(jù)監(jiān)控解決方案,讓你手中的先楫MCU變身為一臺(tái)高精度、可編程的“虛擬示波器”。
方案簡(jiǎn)介
本方案基于HPM6300系列MCU的高性能ADC與hpm_monitor實(shí)時(shí)監(jiān)控服務(wù),實(shí)現(xiàn)了從信號(hào)采樣、數(shù)據(jù)處理到PC端波形顯示的完整鏈路。你無(wú)需外接復(fù)雜設(shè)備,只需一臺(tái)電腦和一塊開(kāi)發(fā)板,即可實(shí)時(shí)觀察、分析模擬信號(hào)波形,極大簡(jiǎn)化硬件調(diào)試與信號(hào)分析流程。
為什么選擇HPM6300的ADC?
高精度:支持16位分辨率,采樣率高達(dá) 2MSPS(12位模式下可達(dá)4MSPS)
多模式支持:讀取轉(zhuǎn)換、周期轉(zhuǎn)換、序列轉(zhuǎn)換及搶占轉(zhuǎn)換模式
多信號(hào)源:可采集外部引腳信號(hào)及芯片內(nèi)部模擬信號(hào)
觸發(fā)靈活:支持PWM精準(zhǔn)觸發(fā),采樣時(shí)刻高度可控
方案核心特點(diǎn)
1. 極速采集,硬件加速
采用 PWM觸發(fā) + DMA自動(dòng)搬運(yùn),實(shí)現(xiàn)零CPU干預(yù)的高速連續(xù)采樣
采樣率最高可達(dá) 2MSPS,輕松捕捉高頻動(dòng)態(tài)信號(hào)
時(shí)序精確,抖動(dòng)極小,適合對(duì)時(shí)序敏感的應(yīng)用場(chǎng)景
2. 實(shí)時(shí)傳輸,即看即得
通過(guò) hpm_monitor 服務(wù),將ADC數(shù)據(jù)實(shí)時(shí)發(fā)送至PC端
支持 USB/UART雙通道,適應(yīng)不同帶寬與連接需求
低延遲、高吞吐,波形顯示幾乎無(wú)感知延遲
3. 靈活處理,隨心所欲
支持 Notify/Stream/Buffer三種上報(bào)模式,適應(yīng)不同采樣需求
可自定義采樣頻率、數(shù)據(jù)長(zhǎng)度與觸發(fā)條件
多通道同步監(jiān)控,支持對(duì)比分析
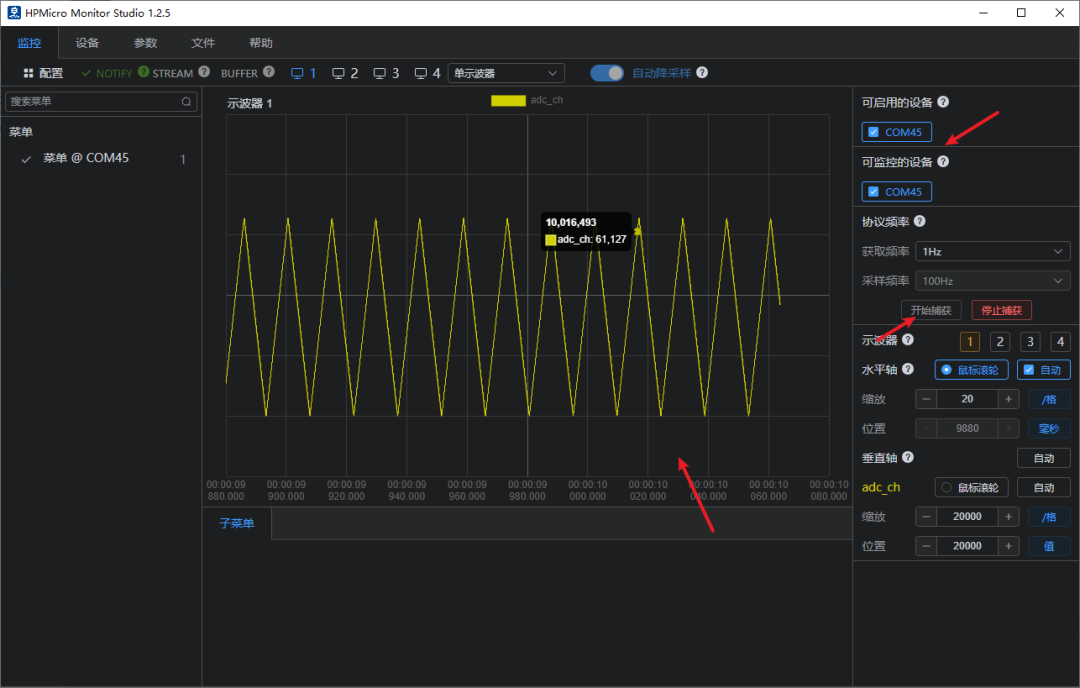
4. 直觀呈現(xiàn),調(diào)試無(wú)憂
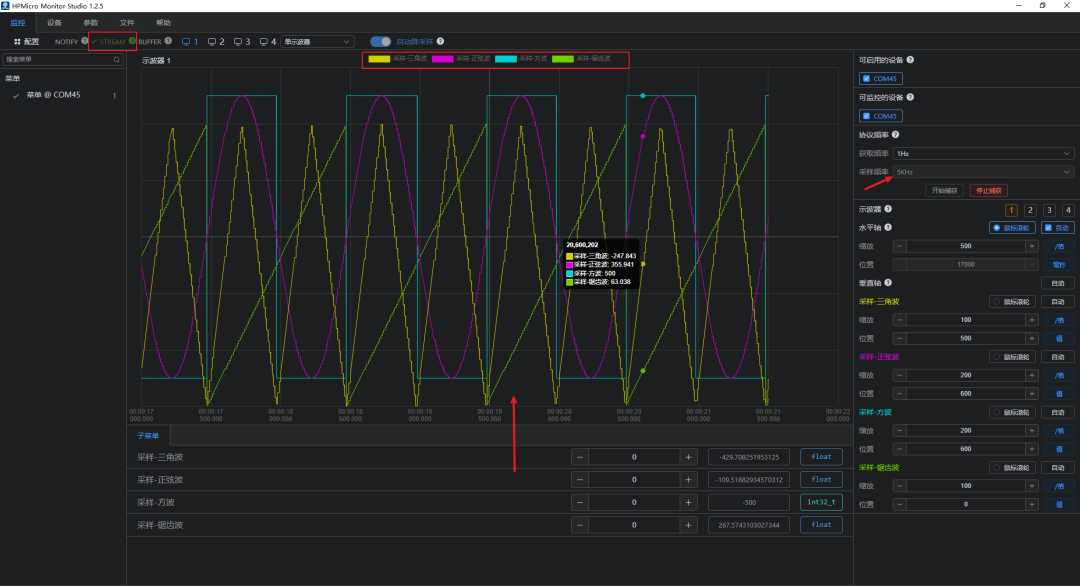
PC端HPMicroMonitorStudio工具提供專業(yè)波形顯示界面
支持縮放、平移、測(cè)量、光標(biāo)定位等實(shí)用功能
參數(shù)實(shí)時(shí)可調(diào),波形實(shí)時(shí)刷新,所見(jiàn)即所得
系統(tǒng)架構(gòu)與數(shù)據(jù)流
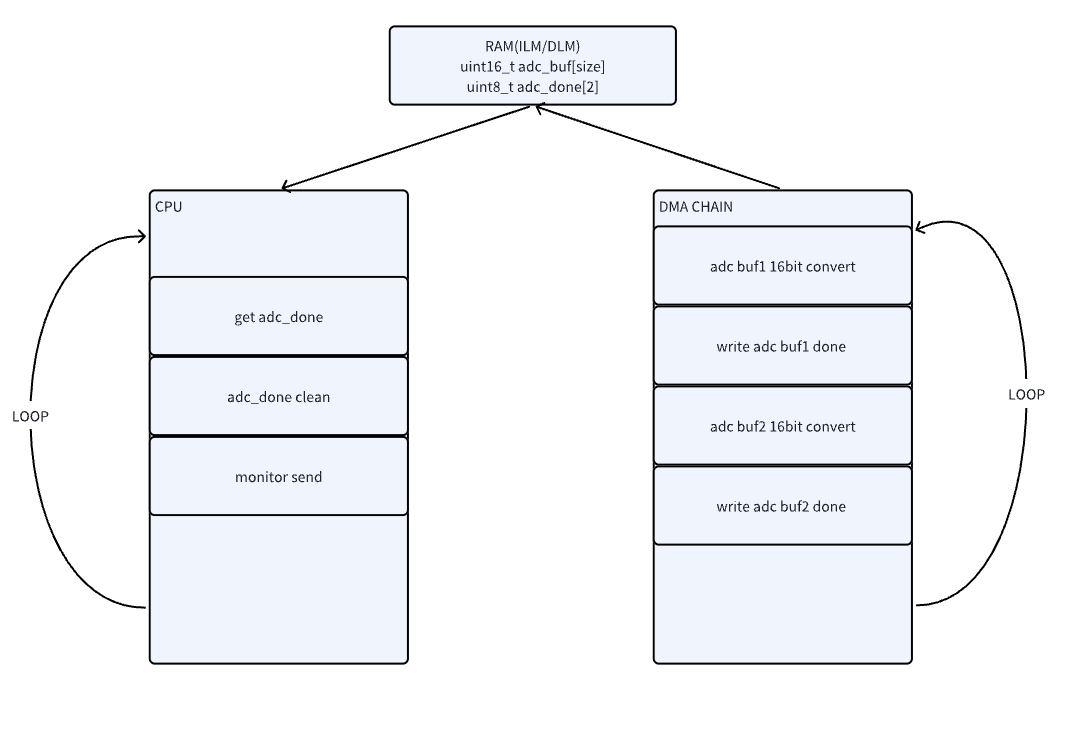
運(yùn)行效果:
6. HPM5300旋變硬解碼方案:高集成度與確定性之選
概述
在追求高性能與高可靠性的電機(jī)控制領(lǐng)域,精確的位置反饋至關(guān)重要。旋轉(zhuǎn)變壓器(旋變)憑借其堅(jiān)固耐用、適應(yīng)惡劣環(huán)境等優(yōu)勢(shì),成為眾多高端伺服及電動(dòng)汽車驅(qū)動(dòng)系統(tǒng)的首選傳感器。然而,傳統(tǒng)的分立式解碼方案往往伴隨著成本高、電路復(fù)雜的設(shè)計(jì)挑戰(zhàn)。
為應(yīng)對(duì)這一挑戰(zhàn),我們推出基于HPM5300微控制器的旋變硬解碼方案。該方案通過(guò)芯片內(nèi)置的專用硬件加速模塊,直接完成旋變信號(hào)的解調(diào)與角度跟蹤,旨在為開(kāi)發(fā)者提供一個(gè)高度集成、確定性強(qiáng)且能顯著減輕CPU負(fù)擔(dān)的解決方案。
硬解碼核心原理
i. 積分解調(diào):硬件模塊將旋變輸出的正余弦信號(hào),與勵(lì)磁信號(hào)同步進(jìn)行符號(hào)乘法(整形)和周期積分。這一過(guò)程能有效濾除高頻勵(lì)磁成分,直接得到僅包含轉(zhuǎn)子角度信息的低頻解調(diào)信號(hào)。
ii. 角度獲取:
針對(duì)解調(diào)后的信號(hào),方案支持兩種主流的角度計(jì)算方式,以適應(yīng)不同應(yīng)用場(chǎng)景的需求:
- 反正切法: 對(duì)解調(diào)后的信號(hào)進(jìn)行反正切計(jì)算,直接得到轉(zhuǎn)子角度。
- 鎖相環(huán)跟蹤: 通過(guò)構(gòu)建包含鑒相器、環(huán)路濾波器的數(shù)字鎖相環(huán),實(shí)現(xiàn)對(duì)角度信號(hào)的閉環(huán)跟蹤,具備更優(yōu)的動(dòng)態(tài)性能與抗干擾能力。
方案亮點(diǎn):高度集成與簡(jiǎn)化設(shè)計(jì)
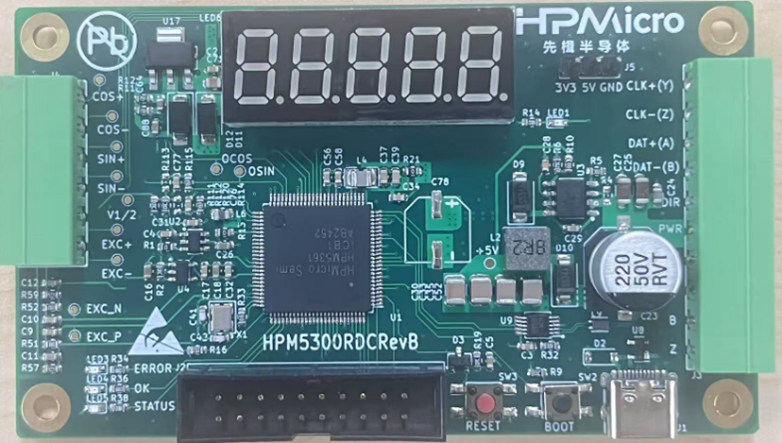
本方案的一個(gè)顯著特點(diǎn)是其高集成度。我們提供的配套解碼板,集成了勵(lì)磁運(yùn)放、信號(hào)調(diào)理、旋變數(shù)字轉(zhuǎn)換(RDC)、信號(hào)丟失檢測(cè)及多種數(shù)據(jù)輸出接口。這極大地簡(jiǎn)化了外圍電路設(shè)計(jì),減少了元器件數(shù)量,有助于降低整體BOM成本并節(jié)省PCB空間。
硬件框架
解碼板以HPM5300為核心,提供了包括兩路ADC、UART、SPI、QEO編碼器仿真輸出以及SEI(編碼器接口)等豐富的外設(shè)資源,方便進(jìn)行系統(tǒng)集成與數(shù)據(jù)交互
軟件架構(gòu)
軟件層圍繞硬解碼模塊構(gòu)建,主要功能包括:
PWM模塊產(chǎn)生旋變勵(lì)磁信號(hào)。
配置ADC同步采樣旋變返回的正余弦信號(hào)。
通過(guò)硬件模塊實(shí)時(shí)解算角度與速度。
提供增量式編碼器仿真輸出(A/B/Z信號(hào))。
支持通過(guò)UART或SPI接口輸出位置數(shù)據(jù)。
靈活的SEI接口可連接外部絕對(duì)式編碼器,用于方案驗(yàn)證與精度對(duì)比。
HPM5300旋變硬解碼方案,將復(fù)雜的信號(hào)處理任務(wù)交由專用硬件完成,在保證高實(shí)時(shí)性與確定性的同時(shí),釋放了寶貴的CPU資源。其高度集成的設(shè)計(jì)有助于工程師簡(jiǎn)化系統(tǒng)架構(gòu),快速構(gòu)建穩(wěn)定可靠的高性能位置檢測(cè)模塊,適用于對(duì)動(dòng)態(tài)響應(yīng)和可靠性有嚴(yán)苛要求的工業(yè)伺服、精密運(yùn)動(dòng)控制等應(yīng)用場(chǎng)景。
完結(jié)
在使用過(guò)程中有任何疑問(wèn)或者建議,歡迎在github對(duì)應(yīng)項(xiàng)目中提交。
-
嵌入式
+關(guān)注
關(guān)注
5202文章
20538瀏覽量
335610 -
HPM
+關(guān)注
關(guān)注
2文章
54瀏覽量
8281 -
先楫半導(dǎo)體
+關(guān)注
關(guān)注
12文章
286瀏覽量
3342
發(fā)布評(píng)論請(qǐng)先 登錄
東西協(xié)作·芯向未來(lái)|先楫半導(dǎo)體亮相2026成都工博會(huì)

【媒體視角】“五高一低” 筑核心,先楫半導(dǎo)體助力具身智能行業(yè)新突破
CES2026:先楫半導(dǎo)體隆重推出HPM5E3Y,打造機(jī)器人運(yùn)動(dòng)控制芯片陣容

CES 2026|先楫半導(dǎo)體重磅發(fā)布HPM5E3Y,構(gòu)建完整機(jī)器人關(guān)節(jié)MCU產(chǎn)品線
2026?啟芯程 | 先楫 HPM_SDK v1.11.0 重磅發(fā)布

先楫方案 | LED車尾燈純硬件高刷新率解決方案
先楫半導(dǎo)體榮膺“年度優(yōu)秀AI機(jī)器人創(chuàng)新產(chǎn)品獎(jiǎng)” | “芯”動(dòng)力賦能產(chǎn)業(yè)升級(jí)
重磅發(fā)布 | Zephyr SDK Glue v0.6.0 發(fā)布
先楫半導(dǎo)體高性能MCU入駐立創(chuàng)商城,國(guó)產(chǎn)芯勢(shì)力再添新動(dòng)能
支持HPM6P00/HPM5E00系列!HPMicro Manufacturing Tool v0.6.0發(fā)布
先楫半導(dǎo)體HPM6E8Y:先楫實(shí)時(shí)控制芯片驅(qū)動(dòng)的機(jī)器人關(guān)節(jié)“芯”時(shí)代

【強(qiáng)勢(shì)上新】HPM5E00:EtherCAT運(yùn)動(dòng)控制MCU,先楫半導(dǎo)體再拓工業(yè)總線產(chǎn)品新版圖

【強(qiáng)勢(shì)上新】HPM5E00:EtherCAT運(yùn)動(dòng)控制MCU,先楫半導(dǎo)體再拓工業(yè)總線產(chǎn)品新版圖
重磅更新 | 先楫半導(dǎo)體HPM_SDK v1.9.0 發(fā)布



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論