 CAN XL 技術解析:從協議演進到自動駕駛數據采集應用實踐
CAN XL 技術解析:從協議演進到自動駕駛數據采集應用實踐

在汽車電子與工業自動化領域,CAN 總線技術始終是數據傳輸的核心支柱。隨著自動駕駛、車聯網等技術的快速發展,傳統 CAN(CAN CC)與 CAN FD 逐漸難以滿足海量傳感器數據、高帶寬通信的需求,CAN XL 作為下一代 CAN 總線標準應運而生。本文將從 CAN 技術演進脈絡切入,深入解析 CAN XL 的核心優勢,并結合實際應用場景,介紹適配 CAN XL 標準的工具方案,為行業從業者提供技術參考。
一、CAN 總線技術的三代演進:從 CAN CC 到 CAN XL 的突破
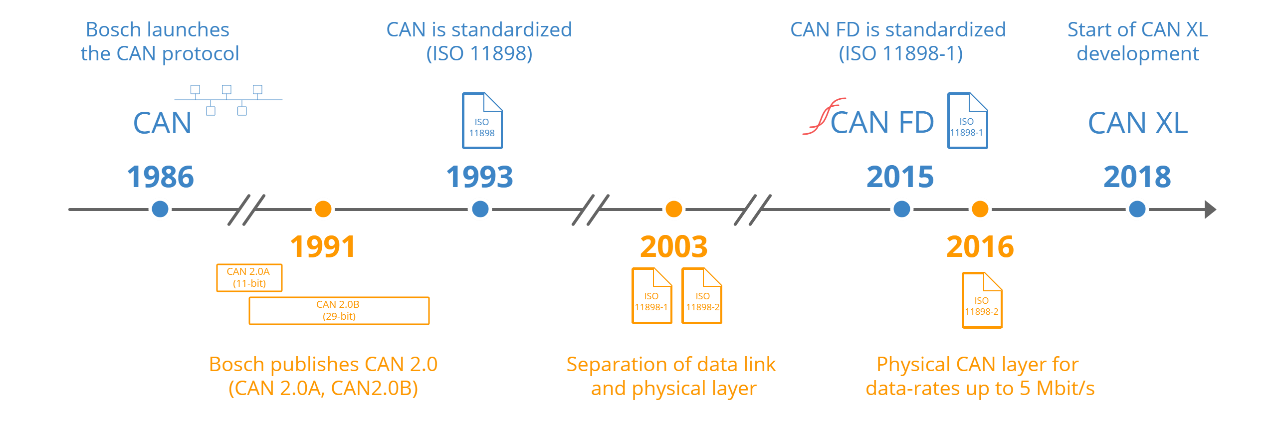
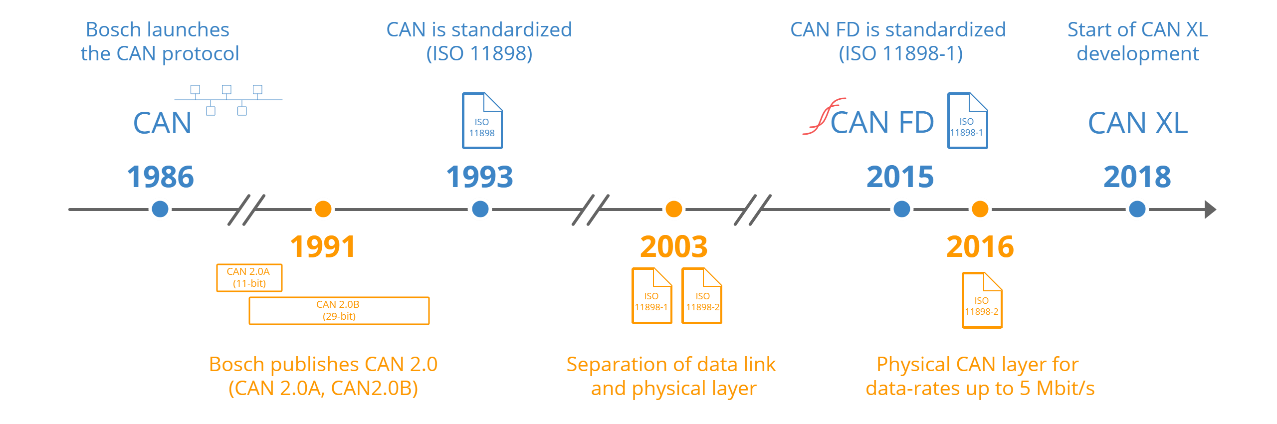
CAN 總線自 1986 年由博世推出以來,經歷了三次關鍵技術迭代,每一次升級都精準解決了不同階段的通信痛點:
經典 CAN(CAN CC):基礎通信的奠基者
作為初代 CAN 標準,CAN CC 以 “可靠、低成本” 為核心優勢,采用非破壞性總線仲裁技術,支持最高 1Mbps 的傳輸速率,每幀數據 payload 最大為 8 字節。其短幀結構設計降低了干擾風險,廣泛應用于傳統車載電子控制(如發動機、底盤控制)與工業設備通信場景。但隨著汽車智能化升級,8 字節的 payload 無法滿足激光雷達、高清攝像頭等傳感器的大量數據傳輸需求,1Mbps 的速率也成為數據采集的瓶頸。
CAN FD:靈活速率的過渡方案
為解決 CAN CC 的帶寬限制,CAN FD 在 2015 年被納入 ISO 標準,實現了兩大突破:一是將 payload 擴展至 64 字節,減少多幀傳輸的開銷;二是引入 “比特率切換(BRS)” 功能,仲裁段維持最高 1Mbps 速率,數據段速率可提升至 8Mbps(SIC)。這一設計在保持與 CAN CC 兼容性的同時,將網絡帶寬提升 3-8 倍,適用于中低數據量的車載場景(如車載診斷、舒適性控制)。但面對自動駕駛所需的 2000 字節以上的超大幀數據(如高精度地圖更新、多傳感器融合數據),CAN FD 的 payload 與速率仍顯不足。
CAN XL:下一代車載通信的核心標準
2024 年正式落地的 CAN XL 標準(ISO 11898-1 2024),徹底打破了前兩代技術的局限:
超大 payload 設計:單幀數據 payload 最高支持 2048 字節,無需分幀即可傳輸激光雷達點云、高清視頻流等大容量數據,大幅降低傳輸延遲;
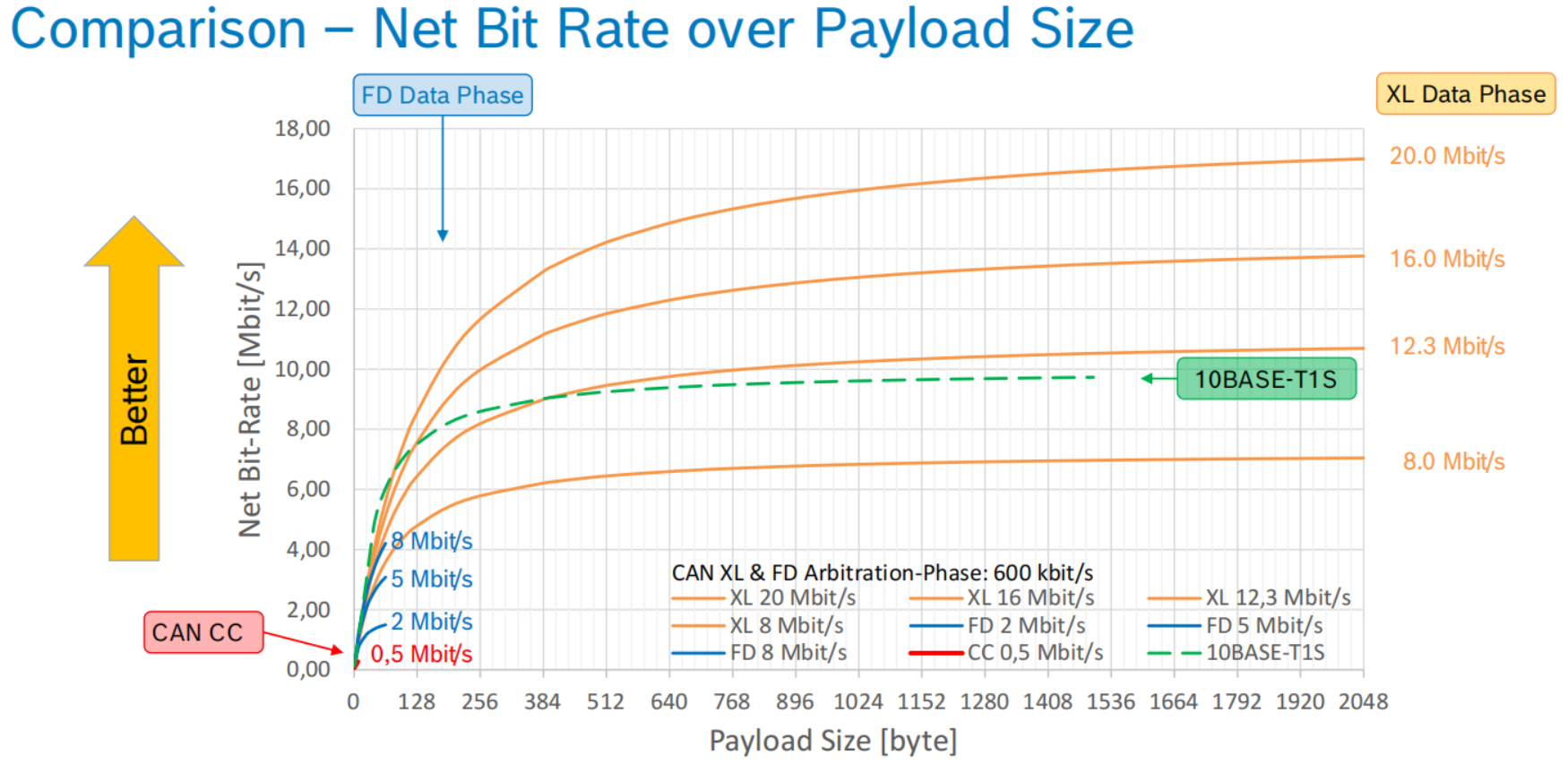
高速率與靈活切換:仲裁段速率保持 1Mbps 以兼容舊設備,數據段速率最高可達 20Mbps(通過收發器模式切換實現),數據 / 仲裁速率比提升至 40:1,遠超 CAN FD 的 16:1;

更強的魯棒性與擴展性:采用雙 CRC 校驗(13 位 PCR C+32 位 FCRC),錯誤檢測能力優于 FlexRay 與以太網;支持虛擬 CAN 網絡(VCAN)、隧道傳輸(如 CAN FD 幀封裝),可無縫銜接以太網架構;
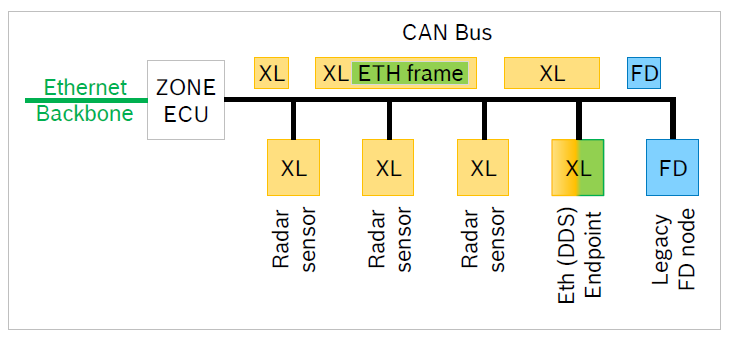
向后兼容特性:物理層沿用兩根信號線設計,可與 CAN CC、CAN FD 設備共網運行,降低車企升級成本。
二、CAN XL 在自動駕駛數據采集中的核心價值
自動駕駛技術的核心是 “數據驅動”,需要實時采集激光雷達、毫米波雷達、攝像頭、IMU(慣性測量單元)等多類傳感器數據,以及車輛底盤狀態、環境感知結果等信息。CAN XL 憑借其高帶寬、大 payload 特性,成為自動駕駛數據采集的理想選擇:
解決海量數據傳輸瓶頸
以激光雷達數據為例,某車型的 128 線激光雷達每秒產生約 1.5GB 原始數據,若采用 CAN FD 傳輸,需將數據拆分為 31250 幀(每幀 64 字節),大量分幀操作會導致傳輸延遲超過 8ms,影響決策系統的實時性;而 CAN XL 可通過單幀 2048 字節的 payload,將分幀數量減少至 732 幀,配合 20Mbps 的數據段速率,傳輸延遲可控制在 2ms 以內,滿足自動駕駛 “毫秒級響應” 的需求。
保障多設備協同采集的可靠性
自動駕駛數據采集系統通常包含 10 個以上的傳感器節點,傳統 CAN 總線在多節點同時傳輸時易出現仲裁沖突,導致數據丟失。CAN XL 的非破壞性仲裁技術與 500V 電氣隔離設計(部分硬件支持),可有效避免總線沖突,同時隔離車載高壓系統對數據采集設備的干擾,確保傳感器數據(如障礙物位置、車速、轉向角)的完整性與同步性。
銜接 “車 - 云” 數據閉環
自動駕駛需要將采集的路測數據上傳至云端進行模型訓練,CAN XL 支持以太網幀隧道傳輸功能,可直接將車載 CAN XL 數據封裝為以太網幀,無需額外協議轉換,提升 “車 - 云” 數據傳輸效率。此外,其 2048 字節的超大幀設計,可一次性傳輸完整的場景數據包(包含多傳感器數據與時間戳),便于云端進行場景復現與模型迭代。
三、CAN XL 落地實踐:從工具到方案的選型參考
要實現 CAN XL 技術的工程化應用,需搭配適配的硬件接口與分析軟件,目前行業內成熟的工具方案已具備 “即插即用” 能力,可覆蓋開發、測試、數據采集全流程:
硬件接口:PCAN-USB XL 的核心優勢

作為 CAN XL 數據采集的硬件核心,PCAN-USB XL 接口具備多協議兼容、高可靠性的特點:
多標準支持:可同時連接 CAN XL、CAN FD、CAN CC 總線,無需更換硬件即可完成不同協議的測試;
高速與隔離設計:基于 USB 2.0(兼容 USB 3.0)接口,配合 TI TCAN6062V SIC 收發器,數據段速率可達 20Mbps;500V 電氣隔離將電腦與車載高壓系統隔離,保護設備安全;
工業級穩定性:工作溫度范圍覆蓋 - 40°C~+85°C,適應車載高溫、振動等惡劣環境;1μs 的時間戳精度可滿足多傳感器數據的同步對齊需求。
針對不同場景,還可選擇 “單接口” 或 “雙接口” 套件:單接口適用于已有 CAN XL 對接設備的場景,雙接口則可實現 “自環測試”(無需額外設備即可驗證 CAN XL 通信功能),降低入門門檻。
分析軟件:PCAN-Explorer 7 的功能升級
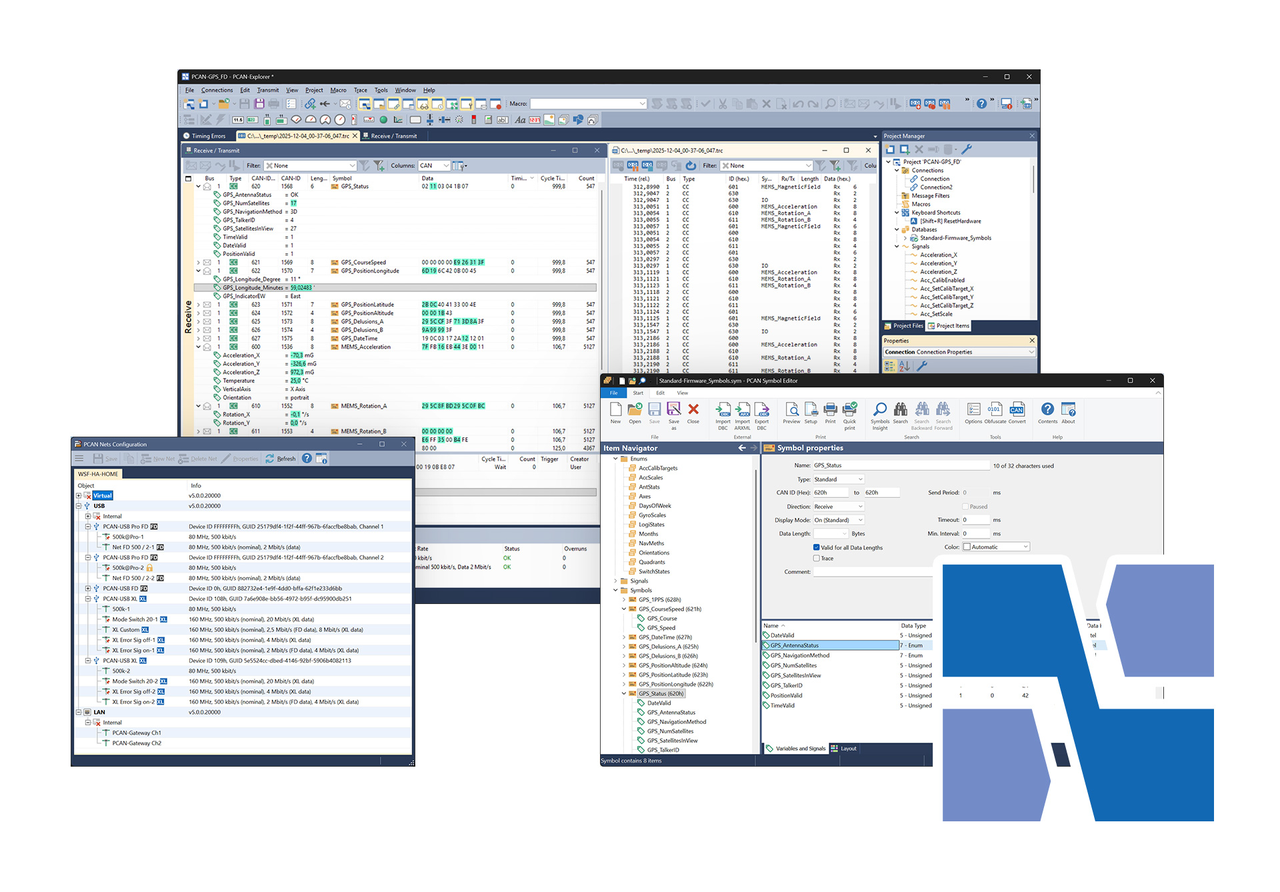
PCAN-Explorer 7 作為配套的 CAN 總線分析軟件,為 CAN XL 應用提供全流程支持:
多協議解析與可視化:可解析 CAN XL 的新型幀結構(如 SDT 服務數據單元、VCAN 標識),在接收列表中直觀顯示數據塊信息;支持數據變化高亮,快速定位關鍵參數(如傳感器數值突變);
數據記錄與回放:支持 trace 文件記錄 CAN XL 通信流量,可循環回放歷史數據,便于復現測試場景;支持 MDF4、BLF 等多格式文件導入,兼容第三方數據處理工具;
自動化與擴展能力:集成 Python 腳本接口,可編寫自動化測試腳本(如批量發送 CAN XL 幀、自動校驗數據);支持加載多個報文解析文件(.sym/.dbc/.arxml格式),無需合并文件即可適配多節點系統。
值得注意的是,當前提供的 PCAN-Explorer 7 搶先體驗版,未來將自動升級為獨立許可證版本(計劃 2026 年正式發布),用戶無需額外付費即可獲取完整功能。
四、總結:CAN XL 開啟車載通信新篇章
從 CAN CC 的 “基礎通信”,到 CAN FD 的 “靈活過渡”,再到 CAN XL 的 “全面突破”,CAN 總線技術的演進始終圍繞 “更高帶寬、更大容量、更強兼容” 的目標。在自動駕駛數據采集、車載以太網協同、工業物聯網等場景中,CAN XL 不僅解決了傳統技術的瓶頸,更搭建了 “舊設備兼容 - 新功能擴展 - 未來場景適配” 的技術橋梁。
對于行業從業者而言,選擇成熟的 CAN XL 工具方案(如包含 PCAN-USB XL 接口、PCAN-Explorer 7 軟件的套件),可快速完成技術驗證與工程落地,搶占下一代車載通信技術的先機。隨著 2026 年 CAN XL 芯片、ECU 設備的規模化量產,這一技術將逐步成為智能汽車、工業自動化領域的標準配置,推動行業向 “更高效率、更安全、更智能” 的方向發展。
審核編輯 黃宇
-
CAN
+關注
關注
59文章
3080瀏覽量
473106 -
數據采集
+關注
關注
42文章
8182瀏覽量
121123 -
自動駕駛
+關注
關注
794文章
14932瀏覽量
180708
發布評論請先 登錄
網線56a與56b:從歷史演進到未來趨勢的技術解析
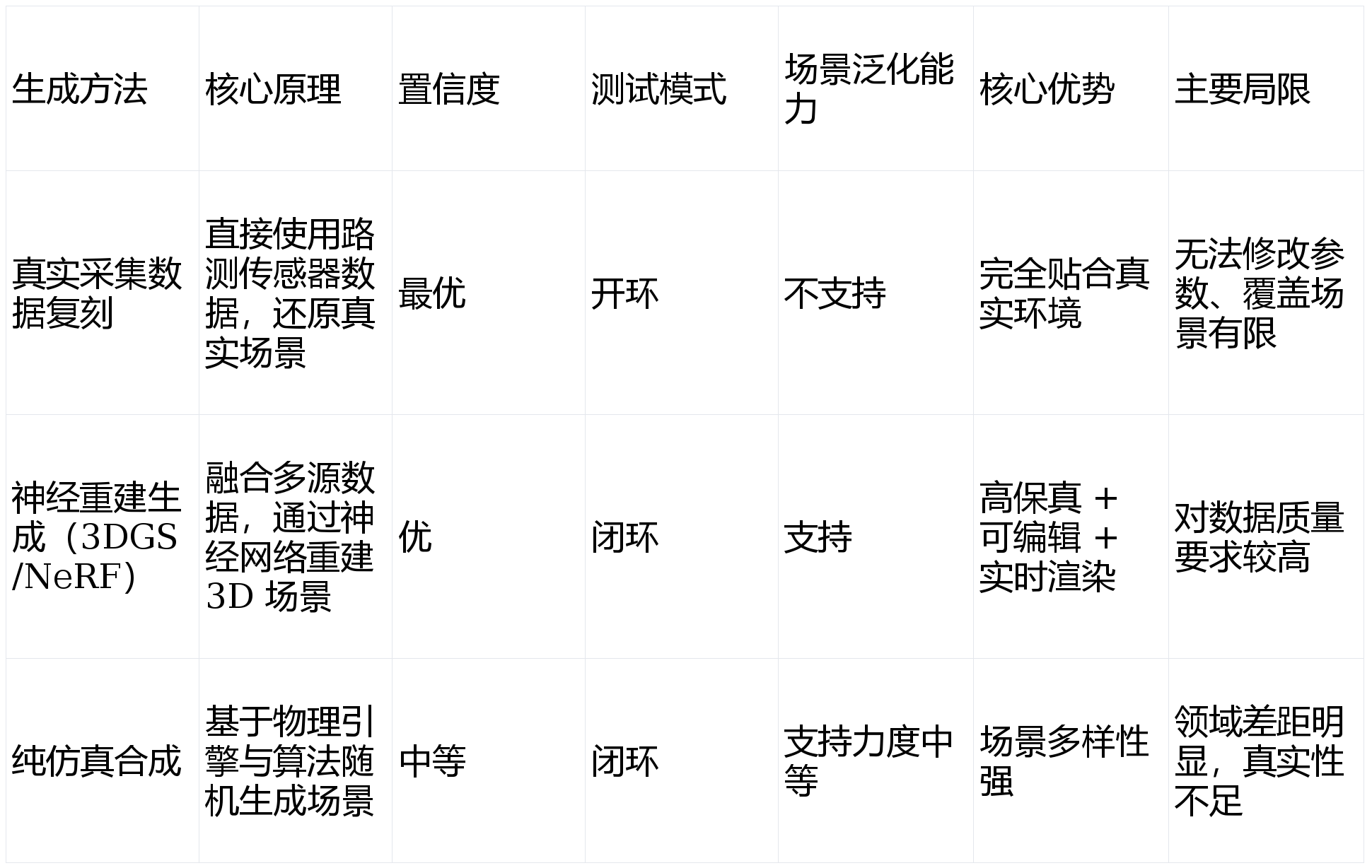
自動駕駛仿真測試場景生成方法:從技術突破到工程落地的全維度解析
高校自動駕駛研究新基建:“實測 - 仿真” 一體化數據采集與驗證平臺

從經典CAN到CAN XL:自動駕駛高帶寬數據采集的新答案
自動駕駛BEV Camera數據采集系統:高精度時間同步解決方案

自動駕駛BEV Camera數據采集:時間同步技術解析與康謀解決方案

自動駕駛數據采集時間同步指南:方法、挑戰、場景與康謀解決方案
自動駕駛數據采集核心指南:ADAS 設備應用、L4 系統選型與優質方案推薦

直播回顧 | CAN XL新標準落地難?從協議解析到實踐應用,虹科技術專家帶您全面探索CAN XL的技術突破與落地

數據驅動自動駕駛:核心要素與發展全景解析

新能源車軟件單元測試深度解析:自動駕駛系統視角
自動駕駛經歷了哪些技術拐點?




 工商網監
工商網監
評論